




包装工程前の、整列・積み重ねといった作業を自動化した事例。手作業工程のロボット化のヒントに。
事例1:ダイレクトメール封入用のサンプル品をセットアップ
事例2:ミートボールパウチの帯掛機投入、箱詰め、パレタイズ
【導入インタビュー】石井食品株式会社
社内で改善アイデアを練り、SIerの力を借りて実現
事例3:シュリンク包装済みピザを3枚重ねて包装機へ投入
事例4:大袋ピロー包装機への投入
事例5:食品製造ライン 投入から箱詰め・パレタイズまで一貫自動化
このカタログについて
| ドキュメント名 | ロボット導入|課題解決提案事例⑮包装機供給編【JRC】 |
|---|---|
| ドキュメント種別 | 事例紹介 |
| ファイルサイズ | 2Mb |
| 取り扱い企業 | 株式会社JRC(ALFIS) (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ロボット導入
課題解決事例集
06-6543-8180
〒 550-0011 大阪市西区阿波座2丁目1番1号 CAMCO西本町ビル5F
Page2
課題解決提案事例
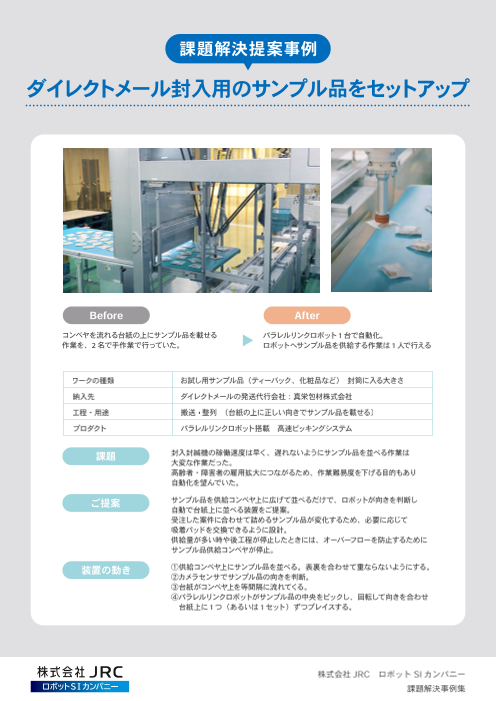
ダイレクトメール封入用のサンプル品をセットアップ
Before After
コンベヤを流れる台紙の上にサンプル品を載せる パラレルリンクロボット1台で自動化。
作業を、2名で手作業で行っていた。 ロボットへサンプル品を供給する作業は1人で行える
プロダクト
封入封緘機の稼働速度は早く、遅れないようにサンプル品を並べる作業は
大変な作業だった。
高齢者・障害者の雇用拡大につながるため、作業難易度を下げる目的もあり
自動化を望んでいた。
サンプル品を供給コンベヤ上に広げて並べるだけで、ロボットが向きを判断し
自動で台紙上に並べる装置をご提案。
受注した案件に合わせて詰めるサンプル品が変化するため、必要に応じて
吸着パッドを交換できるように設計。
供給量が多い時や後工程が停止したときには、オーバーフローを防止するために
サンプル品供給コンベヤが停止。
①供給コンベヤ上にサンプル品を並べる。表裏を合わせて重ならないようにする。
②カメラセンサでサンプル品の向きを判断。
③台紙がコンベヤ上を等間隔に流れてくる。
④パラレルリンクロボットがサンプル品の中央をピックし、回転して向きを合わせ
台紙上に1つ(あるいは1セット)ずつプレイスする。
株式会社 JRC ロボットSI カンパニー
課題解決事例集
Page3
課題解決提案事例
ミートボールパウチの帯掛機投入、箱詰め、パレタイズ
Before After
帯掛機への投入、製函機で組み立てた段ボールへの 手作業工程をそれぞれロボットを用いて自動化。
箱詰め、封函後の段ボールのパレタイズを作業者 人の作業は機械のオペレーション、エラーの復帰等
4~ 5名が手作業で行っていた。 対応のみとなり、2~3名の省人化。
納入先 石井食品株式会社
工程・用途 帯掛機投入 箱詰め パレタイズ
ワークの種類 ミートボールパウチ 2 種類 束ねたミートボールパウチ 段ボール 4 種類
重量:約120g 2種類 2P / 3P x 10束入 / 20束入
1束 2P / 1束 3P 重量:3㎏~8㎏
プロダクト パラレルリンクロボット搭載 ロボットケーサー ロボットパレタイズシステム
高速ピッキングシステム
課題 人手不足解消のため、工場の自動化が社内の課題となっていた。工場全体で初の
ロボット導入となるため、費用対効果がもっとも見込める工程からロボット化を検討していた。
ご提案 各工程に最適なロボットを提案。
帯掛機投入:高速で動くパラレルリンクロボット
箱詰め:スピードと動作速度のバランスが最適なスカラロボット
パレタイズ:人の行き来があるエリアでも使用できる協働ロボット
工程の概要 ①ミートボールパウチを、パラレルリンクロボットで帯掛機へ投入。
②ラベルで結束されたパウチをコンベヤで箱詰め工程へ搬送しながら間隔を調整。
③製函機で組み立てた段ボールに、スカラロボットでミートボールを詰め、封函機で封函。
④協働ロボットで、箱のサイズごとに決められた積み方でパレタイズ。
株式会社 JRC ロボットSI カンパニー
課題解決事例集
Page4
導入事例インタビュー 石井食品株式会社 様
社内で改善アイデアを練り、SIerの力を借りて実現
チャレンジングな完全自動化に向けた
“はじめの一歩”のロボットシステム
導入の決め手は、要求仕様を満たしているか、省スペース、設置
期間の短さ、そして相談のしやすさ。
弊社の製品はパウチ状のパッケージで、やわらかくて形にばらつ
きもあります。
こういったものは正確に運ぶのが難しいだろうと思っていたので、
「一緒に協力して解決していきましょう」という心強い言葉で、
導入に踏み切りました。
石井食品株式会社 京丹波工場 東古 昌樹 様
導入のきっかけ そしてちょうど弊社にもそういう工程があるので、まずはそこ
からやりましょうという話になりました。
生産ライン全工程の自動化に向けた、ロボット導
景利(JRC営業) なるほど。まず動画等で勉強して、実現性
入の第一歩 の高い工程からまず着手することにされたのですね。
景利(JRC営業) ロボットを導入しようと思ったきっかけについ 東古様 なおかつ、単純作業で人手がかかる工程ですね。
て、教えてください。 やはり、技術力を要したり、職人気質な作業を自動化するの
東古様 はなかなか難しいじゃないですか。そこで単純作業の工程に
もともと弊社としても、自動化ロボットというのを取り
フォーカスすると、今回装置を入れていただいたミートボールの
入れようというチャレンジの取り組みがありました。
箱詰めラインになりました。
まずはFOOMA(展示会)を見学したり、いろいろな業者の方に
電話をしたり、情報収集していたんです。自動搬送ロボット関連 景利(JRC営業) 最初のロボット導入に選ぶには難しいとおっ
でお知り合いになったメーカー様にその他の自動化もできますか しゃられていた製造周辺の工程については、今のところは自動化
という相談をして行く中で、最終的に JRCさんとつながりました。 を予定していないですか?ゆくゆくは導入を目指したいと考えられ
景利(JRC営業) ていますか?
会社としてロボットの導入を進めていこうと
していたとのことですが、どういった工程に導入したいと考えて 東古様 もちろん一番理想的なのは、全工程自動化して、各ラ
いたか、どんな部分に課題を抱えていたかなどを、教えていた インにオペレーターが数名いる状態ですね。
だけますでしょうか。
東古様 いきなり難易度の高い工程、弊社で言うとミートボールの
製造から袋詰めまでの工程は、難しいだろうと思っておりました。
YouTube やテレビで工場紹介などを見ていても、最終の箱詰
めやロジスティクスの部分はよく見かけます。そういった工程は
(SIerの)知見が高いだろうと考えました。
石井食品株式会社様は八千代工場 主力製品のミートボールは、冷蔵タイ
(千葉県)、京丹波工場(京都府)、 プで4種類の味付けを展開。他にも、
唐津工場(佐賀県)の全国3か所の より賞味期限の長い冷凍タイプ、
工場で生産を行っています。 非常食にもおすすめの常温タイプ、
弊社のロボットシステムは、京丹波 特定原材料 8 品目不使用の食物アレ
工場の梱包ラインで導入されました。 ルギー配慮食品など、生活に寄り添っ
◀ 京丹波工場 た製品を開発・製造しています。
株式会社 JRC ロボットSI カンパニー
課題解決事例集
Page5
導入事例インタビュー 石井食品株式会社 様
社内で改善アイデアを練り、SIerの力を借りて実現
チャレンジングな完全自動化に向けた“はじめの一歩”のロボットシステム
導入の決め手 えなくなるぞ。」と言われたことがありました。
それを聞いて、「それから20年も経っているのだから、今回
ピックしにくいパウチ状パッケージを扱う上で、 は絶対成功させてやるぞ!」という気持ちになりましたね。
相談のしやすさは重要 景利(JRC営業) 今回の箱詰め工程自動化では不定形という点
景利(JRC営業) 次に、ロボット導入を決定する決め手となっ もですが、箱の形を変えてはいけないという部分が一番難しかっ
た部分をお伺いさせてください。特に重視していたポイントとい たです。
うのはどういった部分でしょうか。 東古様 本来なら、ロボットシステムに合わせて箱の形を設計
東古様 そうですね。要求している生産能力があるという点は大 したリするのが普通なんでしょうけど、今回は既存の箱の形に
前提として、弊社のようにスペースが限られている工場では、狭 システムの方を合わせてもらうことになりました。
いスペースに設置できるかどうか。加えて工期の長さ、短けれ 箱のサイズ変更については、結構がんばって社内でも交渉した
ば短いほど生産を止める期間が短くなるので、それがどの程度 んですが、変動費の上昇が理由で変更できなかったんです。
で済むのか、などを重視していました。 景利(JRC営業) 当初は箱の形を変える想定で話を進めていた
後はやっぱり、最初からすべてうまくいくとは思っていないので、 んですよね。ところが納品予定日の4か月前ごろに「やっぱり箱
相談のしやすさも重要でした。 の形は変えないことになりました。」という連絡を頂きまして。
形の決まったものを並べたり運んだりはどこのメーカーさんも あの時は焦りました。設計チームも大急ぎで対応することになり
得意だと思うんですが、弊社はミートボールという製品の特性上、 ましたが、何とか4ヶ月で仕様変更を間に合わせることができま
形が一定にはなりません。包材がよれたり折れたり、ミートボー した。
ルの位置によって凹凸の位置も変わりますし。 東古様 箱の仕様変更についてはもう1つ事情があります。箱詰
そういった理由でハンドリング時の吸着もうまくいかない可能 めの自動化のプロジェクトが走り出した当初は、もっと箱が大き
性が高いと想定していたので、「そこは一緒に協力して解決して かったので、ワークを並べやすい十分な大きさがありました。
いきましょう」という景利さんの心強い言葉を信じて、今回は それが、装置の設計図を描き詳細を詰めていた段階で、小さ
導入に踏み切りました。 いものに変わったんです。
景利(JRC営業) 現在進行形で、そのあたりは一緒に対応中で 景利(JRC営業) 今回導入された箱詰め装置はミートボールパ
すね。頑張ります! ウチを4袋つかんでから、ハンドツールできゅっと間隔を寄せて
東古様 それ以外ですと意外とよかったのが、製造拠点の近さ 箱に詰めています。
です。JRCさんは京都に一拠点置かれていますよね(JRCロボッ 本来はそのまま横に平たく並べて詰める予定だったんですが、
トSI 事業部宇治工場)。 それでは入らなくなったので、持ち上げた後ちょっと傾けてピッ
箱詰めのところで、空き箱の仕様に急な設計変更が発生してし チを寄せる特殊なハンドを開発して搭載させていただきました。
まったんですが、急遽京都にお邪魔して打ち合わせをし、図面を
引いて製作していただく、ということもありました。
弊社から車で40分くらいなので、そういう近さが便利に感じ
ました。そちらが忙しいならこちらから行きます、というのが気
軽にできたので。
景利(JRC営業) 本当に申し訳ございませんでしたが、弊社と
してもお越しいただくことができて、非常に助かりました。
要求仕様の中で、事前に課題になりそうだ、難しそうだと感じ
ていた部分は何でしたか?
東古様 やはりワークが不定形だという点です。実は弊社も以前
に一度、梱包装置を導入しようとしたことがあったんです。
その当時から働いている方から「自動化は難しいぞ。すぐに使
箱詰め装置のハンドツール ▶
株式会社 JRC ロボットSI カンパニー
課題解決事例集
Page6
導入事例インタビュー 石井食品株式会社 様
社内で改善アイデアを練り、SIerの力を借りて実現
チャレンジングな完全自動化に向けた“はじめの一歩”のロボットシステム
導入後の効果 以外にもたくさんあると思うんです。
これからもいろいろと要望を言うことがあるとは思いますが、
導入効果の引き上げを目指し、ロボットSIerと二人 JRC さんの知見も深まると思いますのでぜひよろしくお願いしま
三脚で改良 す。
景利(JRC営業) 最後に、今回の梱包ラインの自動化は当初目 景利(JRC営業) 実際にそういったような、ワーク形状がネッ
標としていた状態と比べて、現時点ではどのあたりまで進んでい クで困難な自動化のご相談を頂くことはよくあります。こちらこ
るとお感じですか。 そ今後ともよろしくお願いいたします。
東古様 ロボットシステムの導入により当初5人ほどで対応して
いた工程が、今では2人でまかなえるようになっています。ただ、
装置のオペレーションや細かな対応を含めて、最終的には1人で 石井食品株式会社 様
ライン全体を見られる体制を目指していますので、そこに向けて 50年以上愛されている『おべんとクンミート
はまだ改善の余地があると感じています。 ボール』で知られる、1945年創業の食品メー
景利(JRC営業) 改善の余地について、具体的な内容をお聞 カー。
きしてもよろしいでしょうか。 長年培ってきた食品製造の技術、地域の生
産者とのネットワークを強みに、「農と食卓を
東古様 製品に起因するような部分が大半です。不定形なので つなぎ、子育てを応援する」企業として、地
吸着ミスが起こって落としてしまうといったことですね。ロボット 域食材を使った商品開発や、食育活動にも
システムでの完全自動化に向けては、そういった部分をいかに減 力を入れています。
らしていくかが課題として残っています。
試行錯誤して改良していきたいので、一緒に協力して取り組
んでいきたいと考えております。
景利(JRC営業) 現状足りていない部分を、これからどのくら
いの期間で達成したいとお考えですか。
東古様 あと半年くらいです。半年後には完成させて、それをご
相談中のもう1つのラインに展開したいと考えています。
ロボットシステムの不完全な部分に手を取られすぎることがな
いように、2本目のラインへの導入までに1人で装置のオペレー
ションができる状態に持っていきたいです。
いろいろ手は考えているので、それを JRC さんに形にしても
らって、達成まで行ければと。
景利(JRC営業) これまでもいろいろと、「こんなふうにでき
ないか。こんなことを試してみたい。」とかなり積極的にご意見
をくださっていて、とてもありがたく思っております。
東古様 「全部そちらで考えてください。」と投げるのは弊社のス
タイルとは違います。一般的には SIer さんにお任せすることが
多いと思うのですが、弊社は自力でも考え、それを形にするとこ
ろで専門的な知識や技術のある JRC さんの力をお借りしていき
たいです。景利さん以外にも、設計の方など多くの有能な方にご
協力いただいていますので、これからも頼りにしています。
正確にハンドリングしやすい固形の製品とは違い、弊社製品の
ような柔らかいものは、まだまだ自動化できていない工程が弊社
株式会社 JRC ロボットSI カンパニー
課題解決事例集
Page7
課題解決提案事例
シュリンク包装済みピザを3枚重ねて包装機へ投入
Before After
シュリンク包装後のピザを、手作業で3枚ずつ積み パラレルリンクロボット2台で作業を完全自動化。
重ねて包装機に供給。 包装機への供給コンベヤ上に、ロボットでピザを
製造ラインは 24 時間稼働であること、冷凍食品を扱う現場環境が寒いこと、
工場の立地などの理由から、作業員の確保が非常に困難だった。
ピザのシュリンク包装は手で簡単に開封できる薄いものであるため、強く吸着すると
破れたりしわが寄ってしまい、吸着させるのが難しい。
小さな筐体にロボットを2台搭載し、省スペースに完全自動化を実現。
デリケートなワークに合わせて、専用のハンドツールを開発することで、
製品の包装を破損させずにピック&プレイスを行う。
①冷凍ピザが前工程のシュリンク包装機からコンベヤで運ばれてくる。
②ロボットがピザを1枚ずつ吸着してピックする。
③後工程のピロー包装機への供給コンベヤ上にプレイスする。
この時、積んだ山が崩れないよう3枚ずつ正確に縦に積み重ねる。
株式会社 JRC ロボットSI カンパニー
課題解決事例集
Page8
課題解決提案事例
大袋ピロー包装機への投入
Before After
縦ピロー包装機から流れてくる小分けパックの食品 包装工程の能力上昇に合わせて、高速で整列・投入
を、作業員 2名が手作業で大袋ピロー包装機へ投入 ができるロボットを導入。ロボット2台で完全に自動
ワークの種類 食品の小分けパック 重さ:500g
納入先 食品メーカー
工程・用途 包装機投入 / コンベヤ載せ替え / 搬送
プロダクト パラレルリンクロボット搭載高速ピッキングシステム
課題 手作業での包装機投入は、500gの重量の食品を速いスピードで扱う重労働だった。
新しい包装機の導入に伴い生産能力が向上し、手作業での包装機投入では追いつ
かなくなってしまうこととなり、ボトルネック工程とならないよう投入速度を上げる
必要がある。
前工程から等間隔に流れてくるワークを2行 3段に積み、6個一気に包装する工程
が自動化しにくく、人手での作業に頼らざるを得なかった。
ご提案 コンベヤの構成を工夫することにより、限られたスペースで要求通りの積み方が
でき、更にコストパフォーマンスに優れた内容を提案。
縦ピロー包装機からの供給はばらつきが出やすいが、大袋ピロー包装機の停止を
最小限に抑え、装置停止によるオーバーフローを最小限に抑えるプログラムを実装。
装置の動き ①縦ピロー包装されたワークがコンベヤで供給される。
供給ラインは 2ラインある。
②コンベヤを乗り継ぐ際に、ワークが2つずつくっついて並ぶように整列する。
③ロボットがワークを2つ一気にピックし、大袋ピロー包装機の供給部へプレイス
する。3段ずつ縦に積み上げる。
株式会社 JRC ロボットSI カンパニー
課題解決事例集
Page9
課題解決提案事例
食品製造ライン
投入から箱詰め・パレタイズまで一貫自動化
食品(焼き菓子・洋菓子等)製造ラインにおいて、材料搬送から製品の整列・載せ替え工程にいたるまで、
従来人手で行っていた作業を、生産ライン全体を通して自動化。部分的な導入に留まらず、ライン全体を自動化す
ることで、生産効率の最大化と、人の手を介さない衛生管理を両立しています。
原料袋(粉体)、クッキーなどの焼き菓子・洋菓子(包装前・個包装後)、
ワークの種類
トレー、段ボール
納入先 お菓子メーカー
3D ビジョン付きデパレ機、原材料投入、整列、トレー供給機、トレー詰め、
工程・用途
製函、ケーサ、封函機、ラベル貼り、パレタイズ装置、搬送
6 軸多関節ロボット、パラレルリンクロボット、スカラロボット、
プロダクト
AMR(自律移動ロボット)、AGV(無人搬送車)
課題 ・原料投入やパレタイズ・デパレタイズなど、身体的負担の大きい工程での人員確保
が困難。
・人的ミスによる異物混入や食中毒リスク(コンタミネーション)がある。
・従来の手作業による工程では、製品の「割れ」や「欠け」といった破損が避けられ
ず、それに伴う生産ロスが発生。
・多くの人手を要する整列・搬送工程では、急な欠員や採用難による「現場の人数
が揃わない」ことが課題になっている。
ご提案 原料投入から出荷までの全工程をトータルで自動化、生産ラインのボトルネック
解消につながります。特に人手の確保が難しい整列工程や、身体的負荷の大きい
重量物搬送を自動化することで、欠員リスクや人手不足の問題を解決。弊社が得
意とするハンドリング技術により、スピード・正確さを実現。さらに人手を介さな
いことにより衛生的な生産環境を両立します。設計から保守までワンストップで対
応し、安定した生産体制を実現します。
株式会社 JRC ロボットSI カンパニー
課題解決事例集
Page10
装置の動き
④ 整列工程 ⑤ ラベル貼り ⑥ トレー詰め工程 ⑦ 搬送工程
① 搬入工程
③ 原料投入工程
⑧ 製函工程
⑨ 箱詰め工程 ⑩ 封函工程
② デパレタイズ工程
⑫ 出荷工程 ⑪ パレタイズ工程
① 搬入工程 AMR が原料パレットをデパレタイズエリアへ自動搬送。
② デパレタイズ工程 6 軸ロボットが原料袋を認識し、デパレタイズ(荷下ろし)を実行。
③ 原料投入工程 別の 6 軸ロボットが袋を開封・把持し、加工機へ原料を投入。
パラレルリンクロボットが、オーブンから出た焼き菓子・洋菓子などをカ
④ 整列工程
メラで認識し、コンベヤへ高速整列。
搬送中の商品をセンサーで検知し、自動ラベラーが所定位置へラベルを貼
⑤ ラベル貼り工程
付。貼付後、そのまま次工程へ搬送。
(検査・個包装後)個包装された商品を、別のパラレルリンクロボットが
⑥ トレー詰め工程
吸着し、トレーへ高速パッキング。
⑦ 搬送工程 AGV が磁気テープに沿って、梱包済みの段ボールを最終封函ラインへ搬送。
平板段ボールを自動供給し、成形機構で立体形状に組み立て。底面を封緘
⑧ 製函工程
し、箱詰め位置へ搬送。
⑨ 箱詰め工程 スカラロボットがトレーを正確にピックし、段ボールへ箱詰め。
箱詰め済み段ボールの上部フラップを自動で折り込み、テープ貼付装置で
⑩ 封函工程
封緘。封函後、次工程へ搬送。
⑩ パレタイズ工程 6 軸ロボットが完成した段ボールをパレット上に積み上げ。
⑨ 出荷工程 積載完了後、AMR がパレットをピックアップし、出荷待機エリアへ搬送。
株式会社 JRC ロボットSI カンパニー
課題解決事例集