




工場内をどこでも、高精度に3次元計測
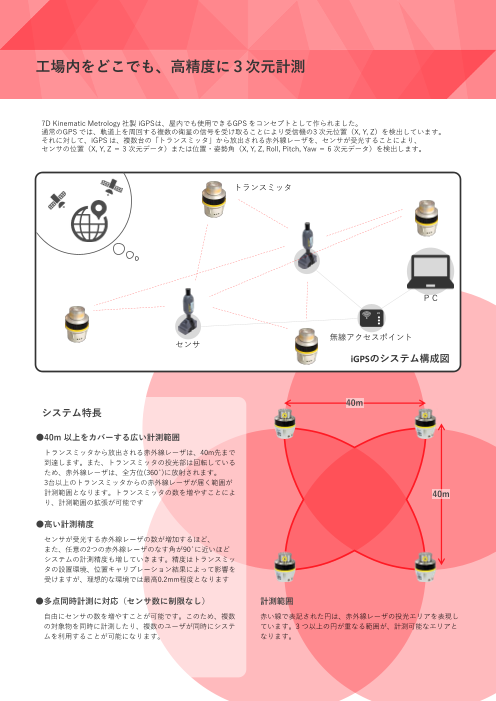
7DKinematicMetrology社製iGPSは、屋内でも使用できるGPSをコンセプトとして作られました。
通常のGPSでは、軌道上を周回する複数の衛星の信号を受け取ることにより受信機の3次元位置(X,Y,Z)を検出しています。
それに対して、iGPSは、複数台の「トランスミッタ」から放出される赤外線レーザを、センサが受光することにより、センサの位置(X,Y,Z=3次元データ)または位置・姿勢角(X,Y,Z,Roll,Pitch,Yaw=6次元データ)を検出します。
工場内で稼働するロボットの協調作業、巨大な試験水槽内での模型船の挙動計測、自動車の寸法・形状検査、考古学研究の遺跡測量、航空機、造船、プラントなどの大型構造物の計測など、幅広いアプリケーション事例があります。
このカタログについて
| ドキュメント名 | 広範囲3次元計測システム 「iGPS」 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.6Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社東陽テクニカ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
広範囲3次元計測システム iGPS
Page2
工場内をどこでも、高精度に3次元計測
7D Kinematic Metrology 社製 iGPSは、屋内でも使用できるGPS をコンセプトとして作られました。
通常のGPS では、軌道上を周回する複数の衛星の信号を受け取ることにより受信機の3 次元位置(X, Y, Z)を検出しています。
それに対して、iGPS は、複数台の「トランスミッタ」から放出される赤外線レーザを、センサが受光することにより、
センサの位置(X, Y, Z = 3 次元データ)または位置・姿勢角(X, Y, Z, Roll, Pitch, Yaw = 6 次元データ)を検出します。
トランスミッタ
PC
無線アクセスポイント
センサ
iGPSのシステム構成図
40m
システム特長
●40m 以上をカバーする広い計測範囲
トランスミッタから放出される赤外線レーザは、40m先まで
到達します。また、トランスミッタの投光部は回転している
ため、赤外線レーザは、全方位(360̊)に放射されます。
3台以上のトランスミッタからの赤外線レーザが届く範囲が
計測範囲となります。トランスミッタの数を増やすことによ 40m
り、計測範囲の拡張が可能です
●高い計測精度
センサが受光する赤外線レーザの数が増加するほど、
また、任意の2つの赤外線レーザのなす角が90̊に近いほど
システムの計測精度も増していきます。精度はトランスミッ
タの設置環境、位置キャリブレーション結果によって影響を
受けますが、理想的な環境では最高0.2mm程度となります
●多点同時計測に対応(センサ数に制限なし) 計測範囲
自由にセンサの数を増やすことが可能です。このため、複数 赤い線で表記された円は、赤外線レーザの投光エリアを表現し
の対象物を同時に計測したり、複数のユーザが同時にシステ ています。3 つ以上の円が重なる範囲が、計測可能なエリアと
ムを利用することが可能になります。 なります。
Page3
●6次元データの算出(X, Y, Z, Rx, Ry, Rz) ●動的な計測に対応
センサ1点に対して3次元位置(X, Y, Z)が検出されます。 最高40Hzでのサンプリングが可能で、
また、相対位置関係の変わらない3点以上を使用することで 対象物の挙動計測に対応します。
3次元位置に加え、各軸の回転角(Rx, Ry, Rz)を算出すること
が可能になります。
●自由なシステム設計・増設
トランスミッタやセンサの数・配置を自由に設計することが
●データ出力
でき、ご要求内容に合わせたシステムを構築することが可能
計測結果はCSVファイルとして出力が可能なほか、TCP出力 です。トランスミッタやセンサの追加などシステムの拡張も
により外部システムへ逐次データを送信も可能です。 用意に行えます。
幅広いアプリケーション
モニタリング&
6自由度の挙動計測
フィードバック制御
測量 寸法・形状の
品質検査
大型部品の組み立て
Page4
アプリケーション例
●モニタリング&フィードバック制御
工場内で稼働するロボットの協調作業や、決められた区域を動き回るAGV (無人搬送用台車)の
トラッキングに適用できます。
ロボットに3点以上のセンサを取り付けることにより、
ロボットの位置・姿勢角の6次元データ(X, Y, Z, Roll, Pitch, Yaw)を取得することができ、
また、複数台のロボットを同時計測することも可能です。
これらのデータを、複数台のロボットによる協調動作の際にモニタリング、
またはフィードバック制御をするために活用することができます。
- 位置・姿勢角の6次元データ出力(X, Y, Z, Roll, Pitch, Yaw)
-計測データ出力機能
- 40Hzサンプリング
- 複数台の計測対象物を同時モニター
Page5
●挙動計測
直径70m規模の巨大な試験水槽内を動く、模型船の挙動を計測する事例です。
模型船に3点以上のセンサを取り付けることにより、3次元位置だけでなく、各軸の回転情報を含
めた位置・姿勢角の6次元データ(X, Y, Z, Roll, Pitch, Yaw)を計測可能です。
また、全方位(360°)からの計測によって死角をなくすことで、連続した模型船の挙動を計測す
ることが可能です。
- 位置・姿勢角の6次元データ出力(X, Y, Z, Roll, Pitch, Yaw)
- 外部信号との同期計測
- 計測データ出力機能
- 40Hzサンプリング
- 死角をなくした連続トラッキング
Page6
アプリケーション例
●寸法・形状検査
自動車の寸法・形状検査の事例です。
航空機部品やトラックなど
より大型の構造物の寸法・形状検査にも適用されます。
プローブ先端を対象物に接触させ、
対象物の3 次元データ(X, Y, Z)を測定します。
測定したデータは即座に設計値(CAD データ)と比較、
ディスプレイ上に設計値と実測値の差を表示します。
また、MCA アーム(機械式3 次元計測器)との連携により、
車両の内装品などiGPS の赤外線レーザが遮蔽されてしまう
箇所の測定も可能になります。
● 再セットアップなしで、全方位(360°)の計測が可能
● 設計値と実測値の差をモニター
● MCA アーム(機械式の3 次元計測機)との連携により、
赤外線レーザが届かない場所の測定も可能
●測量
考古学研究の遺跡測量の事例です。
プローブ先端を対象物に接触させ、
対象箇所の3 次元データ(X, Y, Z)を測定します。
広範囲を一度にカバーすることで、距離の離れた
複数点の相対位置の高精度な計測を担保でき、
セットアップの手間も最小限に抑えられるiGPSの
特長が活かされるアプリケーションです。
● 広範囲を一度のセットアップでカバー
● 長距離の複数点相対位置関係も高精度計測
● セットアップの手間が最小限
Page7
●大型構造物の組み立て
航空機の組立作業を効率化・高精度化するアプリケーションです。
造船、プラントなどの大型構造物にも適用されます。
部品同士の相対的な位置・姿勢(X, Y, Z, Roll, Pitch, Yaw)をリアルタイムでモニターすることで、
組立作業時間を短縮することが可能です。
また、組立が終了したと同時に、組立精度を確認することができるため、
組立後に精度検査を実施する必要がなくなります。
- 相対的な位置・姿勢をリアルタイムで検出(X, Y, Z, Roll, Pitch, Yaw)
- 複数の対象物を同時計測(センサ数に制限なし)
- 3D のアニメーション&数値データでモニタリング
Page8
システム構成品
●トランスミッタ
トランスミッタはシステムの必須構成品のひとつです。
システムあたり3台以上のトランスミッタが必要となります。
(計測原理上は2台のトランスミッタでも動作が可能ですが、精度の保証範囲外となります)
トランスミッタは2枚の扇状のレーザー照射と周囲全方位への赤外線ストロボ発光を行います。
扇状レーザーは回転するトランスミッタ上部から照射され、
その回転速度は各トランスミッタ固有の一定値となります。
センサがこれらのレーザー、及び、赤外光を検出し、ソフトウェアが計算処理を行うことで、
各トランスミッタを基準とするセンサの立体方位角が算出されます。
型番 :0135459(現), 0060551(旧)
※0135459にはRoHS2対応のラベルが貼られています。その他仕様には変更ありません。
サイズ :φ140m × 194mm
重量 :3kg
動作温度 : 0 ~ 40 ℃
保管温度 :-20 ~ 60 ℃
固定機構 :<底部>5/8-11UNC×5/8インチ(15.875mm)ネジ穴 [主固定用] と 1/4インチ(6.35mm)径穴 [回転防止用]
上部回転速度 :40 ~ 50 Hz
計測有効範囲 :2 ~ 40 m
照射範囲 :周囲360度、上下±30度
安全クラス :CDRHクラス1 レーザー
ストロボ波長 :890nm
レーザー波長 :780nm
消費電力 :8W @12VDC
電源コネクタ :4ピンコネクタ push-pull自動ロック機構、アライメントガイド付き
30°
30°
30°
30°
Page9
●トランスミッタ用AC電源アダプタ
国際的に一般的なAC電源をトランスミッタへの供給に適した電源へ変換します。
トランスミッタ0135459、及び、0060551に適合します。
型番 :0060510
サイズ :(本体部)119mm × 60mm × 32mm (ケーブル長)1.8m
重量 :270g
動作温度 :0 ~ 40 ℃
保管温度 :-20 ~ 60 ℃
出力電源 :12VDC, 3.35A
入力電源 :IEC320-C14 Inlet, 100-240VAC, 50-60Hz
●トランスミッタ用バッテリ
三脚への取り付け用バッグに入った充電器内蔵型のリチウムイオンバッテリです。
満充電状態で約10時間のトランスミッタ駆動が可能となります。
型番 :0064111
サイズ :(本体部)125mm × 200mm × 35mm
重量 :922g
動作温度 :0 ~ 45 ℃
保管温度 :-20 ~ 60 ℃
電圧・容量 :10.8V, 8.8Ah
入力電源 :IEC320-C14 Inlet, 100-240VAC, 50-60Hz
●トランスミッタ用三脚ライト
簡易にトランスミッタを設置できるポータブルの三脚です。
脚は簡便なクランプ機構により伸延が可能で、先端は点接地の鉄製爪となっており様々な屋外環境にも適応します。
持ち運びに便利なようにストラップ、ハンドル付きです。
5/8-11UNCネジはノブが付いており、素早くトランスミッタを固定できます。
型番 :0061594
サイズ(収納時) :15cm × 15cm × 112cm
最伸延時高さ :180cm
重量 :7.3kg
保管温度 :-20 ~ 60 ℃
Page10
システム構成品
● i5is
i5isは5自由度の計測が行えるiGPSセンサです。
2つのセンサを内蔵しており、トランスミッタからの光信号を
iGPSソフトウェアのSurveyorで処理するためのデジタル信号に変換します。
3次元位置計測、5自由度のベクトル計測のほか、
別のセンサと組み合わせることにより6自由度の計測も可能です。 ?
信号処理から無線通信まですべてが一体となっており素早く楽に設置できるセンサツールです。
型番 :0140188(TELEC認証付き) 0105868(TELEC認証なし)
サイズ :86mm × 50mm × 198.7mm
重量 :445g
動作温度 :0 ~ 40 ℃
保管温度 :-20 ~ 60 ℃
動作電源 :Li-Ionバッテリ(満充電時連続6時間駆動)
付属品 :バッテリ×2、充電器、1/4インチtooling pin
通信規格 :IEEE 802.11 a/b/g (アンテナ内蔵) [WLAN] / IEEE 802.3 [LAN]
固定機構 :<底部>1/4インチtooling pin差込穴
有効入射角 :周囲360°、上下±45°
1/2インチ球受け
センサ部
ステータス表示LED
信号処理回路、Wifiアンテナ内蔵
センサ部
Li-Ionバッテリ
有線通信用 RJ45 Jack
Page11
● i5is DTK (ダイナミック トラッキング キット)
i5is×2式と取付治具のtooling pad×2つ、
外部システムとの同期のためのデジタルI/Oモジュール、
これらすべてを収納できる持ち運びに便利なケースをまとめたキットです。
型番 :0140127(TELEC認証付き) 0105863(TELEC認証なし)
以下の内容が含まれます。
i5is ×2
バッテリ (0103601) × 4
バッテリ充電器 (0103602) × 2
デジタルI/Oモジュール(0106144) × 1
¼インチtooling pin (0106077) × 2
tooling pad (0105866)× 2
専用ケース × 1 ※ケースの単品販売はございません。
tooling pin
tooling pad
Page12
システム構成品
● i6 LRP (ロング リーチ プローブ) キット
i6LRPは6自由度の計測が行えるよう4つのセンサを内蔵しています。
キットには2種類の長さのプローブ延長パーツが用意されており、先端のプローブチップも2種類の形状が含まれます。
トリガボタンを押すことでプローブ先端の座標値を取得することができるため、
計測現場の様々な点の座標取得や、大型構造物の寸法検査などにも利用できます。
また、各センサの位置関係が高精度に校正※されており、
トランスミッタ位置関係のキャリブレーション バンドルにも最適です。
型番 :0140132 (TELEC認証付き) 0129189(TELEC認証なし)
重量 :(i6 LRP本体+1m延長付き) 3.0kg (キット全体) 22.0kg
動作温度 :0 ~ 40 ℃
保管温度 :-20 ~ 60 ℃
動作電源 :Li-Ionバッテリ
通信規格 :IEEE 802.11 a/b/g (アンテナ内蔵) [WLAN]
セキュリティ :WPA2 IEEE 802.11i
内容物 :i6 LRP本体
プローブ延長パーツ(0.4m, 1.0m)
プローブチップ(0.5インチ球先端×2、点先端×2)
プローブキャリブレーション台
バッテリ(0063474)×2
バッテリ充電器
専用ケース
※再校正サービス(SVCE-600-313)もございます。
バッテリ充電器 プローブキャリブレーション台
バッテリ
プローブ延長パーツ 0.4m プローブチップ
プローブ延長パーツ 1.0m
i6 LRP本体 専用ケース
Page13
計測の概要
● 座標系の定義
プローブなどで計測した位置やトランスミッタの位置を利用して、任意の座標系を作成することが可能です。
1つの点を座標系における特定の点として定義するほか、
2つの点を用いて直線、3つの点を用いて平面、ないしはその法線を定義し、
これらの組み合わせにより空間上に座標系を定義することができます。
● 座標位置の計測
定義した座標系を基準とした各センサの位置を計測することができます。
動的な(~40Hz)位置を計測するほか、トリガ入力やソフトウェア操作により静的な位置計測が行えます。
あらかじめ複数の座標系を用意しておき、表示を切り替えることも可能です。
(X, Y, Z)
(X, Y, Z)
Page14
計測の概要
● 6次元データの計測
相対位置関係の崩れない3つ以上のセンサに対して、動的な座標系を定義することが可能です。
それらのセンサを剛体に取り付けることにより、対象物の位置・姿勢を含む6自由度の計測が可能となります。
動的座標系の定義にも各センサの位置を用いるほか、プローブ等を用いて計測した任意の点・線・面を用いることができ、
自由に設定することができます。
(X, Y, Z, Rx, Ry, Rz)
● 動的な基準座標系
3つ以上のセンサに紐づけた動的な座標系を基準座標系としても扱うことが可能です。
動く対象物を基準として相対的な位置・姿勢関係を計測する際などに用いられます。
Page15
● 複数座標系の同時計測
あらかじめ複数の静的・動的な座標系を定義しておき、任意の位置・姿勢を任意の座標系基準で表現することが可能です。
● 計測範囲の拡張
トランスミッタの数を増やすことにより、計測範囲の拡張が可能です。
Page16
7D Kinematic Metrology Inc.
iGPSはカナダ・オンタリオ州ケンブリッジを拠点とする7D Kinematic Metrology社によって開発・設計・製造されています。
オ■ートモーティブ・ソリューション部