周辺環境 / 路面形状計測システム
XenoLidar/XenoTrack-RT
Highway pilot True-Solid-state
Adaptive Cruise Control Multi-beam
Automated Emergency Braking Large range
Safe Stop High resolution
Lane Assist Reliable
Free space detection Eye Safe
Object tracking
Predictive evasion
Automated driving
Active suspension
The road surface profile
The eyes for self-driving vehicles
Digitize roads and vehicle’s surroundings for ADAS and AD
周辺環境計測システム
XenoLidar
XenoLidarは、自動車のルーフなどに取り付けてレーザーを照射し反射光を検知することで、
周辺環境を測定する高精度な光学センサです。
世界で初めてLiDAR(ライダー:Light Detection and Ranging “光による検知と測距”)に
マルチビームを採用したTrue-Solid-state型マルチビーム方式のLiDARであり可動部や回転機構、
MEMSミラーさえも持たないため、壊れにくく自動車等へ導入する際には設置場所の自由度が広がります。
さらに数千本のレーザー照射により一度に多くのターゲットを検出でき、
昼夜・天候を問わず正確に検知・計測します。
特長 アプリケーション
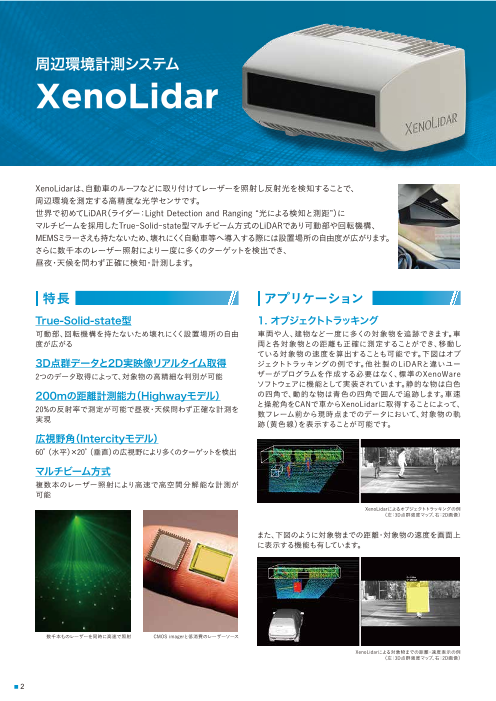
True-Solid-state型 1. オブジェクトトラッキング
可動部、回転機構を持たないため壊れにくく設置場所の自由 車両や人、建物など一度に多くの対象物を追跡できます。車
度が広がる 両と各対象物との距離も正確に測定することができ、移動し
ている対象物の速度を算出することも可能です。下図はオブ
3D点群データと2D実映像リアルタイム取得 ジェクトトラッキングの例です。他社製のLiDARと違いユー
2つのデータ取得によって、対象物の高精細な判別が可能 ザーがプログラムを作成する必要はなく、標準のXenoWare
ソフトウェアに機能として実装されています。静的な物は白色
200mの距離計測能力(Highwayモデル) の四角で、動的な物は青色の四角で囲んで追跡します。車速
20%の反射率で測定が可能で昼夜・天候問わず正確な計測を と操舵角をCANで車からXenoLidarに取得することによって、
実現 数フレーム前から現時点までのデータにおいて、対象物の軌
跡(黄色線)を表示することが可能です。
広視野角(Intercityモデル)
60°(水平)×20°(垂直)の広視野により多くのターゲットを検出
マルチビーム方式
複数本のレーザー照射により高速で高空間分解能な計測が
可能
XenoLidarによるオブジェクトトラッキングの例
(左:3D点群強度マップ、右:2D画像)
また、下図のように対象物までの距離・対象物の速度を画面上
に表示する機能も有しています。
数千本ものレーザーを同時に高速で照射 CMOS imagerと低消費のレーザーソース
XenoLidarによる対象物までの距離・速度表示の例
(左:3D点群強度マップ、右:2D画像)
■ 2
XenoWare ソフトウェア
XenoWare SDK( サンプルコード,APIをご提供)
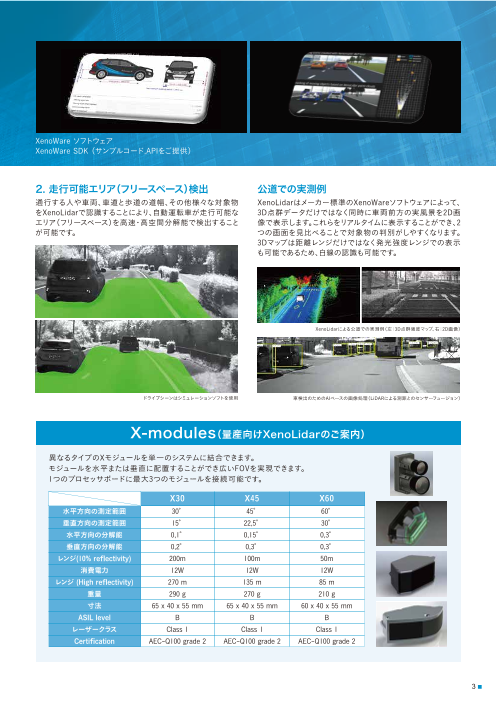
2. 走行可能エリア(フリースペース)検出 公道での実測例
通行する人や車両、車道と歩道の道幅、その他様々な対象物 XenoLidarはメーカー標準のXenoWareソフトウェアによって、
をXenoLidarで認識することにより、自動運転車が走行可能な 3D点群データだけではなく同時に車両前方の実風景を2D画
エリア(フリースペース)を高速・高空間分解能で検出すること 像で表示します。これらをリアルタイムに表示することができ、2
が可能です。 つの画面を見比べることで対象物の判別がしやすくなります。
3Dマップは距離レンジだけではなく発光強度レンジでの表示
も可能であるため、白線の認識も可能です。
XenoLidarによる公道での実測例(左:3D点群強度マップ、右:2D画像)
ドライブシーンはシミュレーションソフトを使用 車検出のためのAIベースの画像処理(LiDARによる測距とのセンサーフュージョン)
X-modules(量産向けXenoLidarのご案内)
異なるタイプのXモジュールを単一のシステムに結合できます。
モジュールを水平または垂直に配置することができ広いFOVを実現できます。
1つのプロセッサボードに最大3つのモジュールを接続可能です。
X30 X45 X60
水平方向の測定範囲 30° 45° 60°
垂直方向の測定範囲 15° 22,5° 30°
水平方向の分解能 0,1° 0,15° 0,3°
垂直方向の分解能 0,2° 0,3° 0,3°
レンジ(10% reflectivity) 200m 100m 50m
消費電力 12W 12W 12W
レンジ (High reflectivity) 270 m 135 m 85 m
重量 290 g 270 g 210 g
寸法 65 x 40 x 55 mm 65 x 40 x 55 mm 60 x 40 x 55 mm
ASIL level B B B
レーザークラス Class 1 Class 1 Class 1
Certification AEC-Q100 grade 2 AEC-Q100 grade 2 AEC-Q100 grade 2
3 ■
XenoLidar
システム仕様 Highwayモデル Intercityモデル
最長測定距離 200m(20%反射率で測定可能) 50m(20%反射率で測定可能)
水平方向の測定範囲 30° 60°
垂直方向の測定範囲 10° 20°
3Dデータ水平方向分解能 0.2° 0.3°
3Dデータ垂直方向分解能 0.2° 0.3°
2D画像水平方向分解能 0.02° 0.04°
2D画像垂直方向分解能 0.02° 0.04°
データ出力レート 25Hz 20Hz
レーザークラス Class 1 Class 1
3Dデータポイント数 125,000点/秒 350,000点/秒
2Dデータポイント数 200Mbit/秒 200Mbit/秒
ピクセル数 0.8Mピクセル 0.8Mピクセル
3D測距精度 1%以内 1%以内
最短測定距離 <5m <1m
データインターフェース
データ出力 Ethernet
データフォーマット(2Dデータ) XIM
データフォーマット(3Dデータ) XPC
タイムスタンプ XenoLidar, CAN, 外部トリガ信号
CANインターフェース OBD II, DB9
システムサイズ
センサーサイズ 幅17cm×奥行き12cm×高さ8cm
センサー重量 1.5kg
コントローラーサイズ 幅21.5cm×奥行き26cm×高さ8cm
コントローラー重量 4.2kg
動作環境
動作温度範囲 0 ‒ 40℃
保管温度 -40 ‒ 80℃
湿度 10 ‒ 90%(結露なきこと)
IP 保護等級 IP65
電源情報
供給電源 12V DC
消費電力(センサー部) 25W
消費電力(コントローラー部) 100W
システム構成
XenoLidarセンサーユニット
XenoLidarコントローラー(quad-core i7, GTX 1050 Ti GPU)
XenoLidarマウントキット
CANインターフェースキット
XenoWare(制御解析ソフト)ライセンス
ケーブルセット
ユーザーマニュアル
■ 4
路面形状計測システム
XenoTrack-RT
XenoTrack-RTは、LiDAR(ライダー:Light Detection and
Ranging “光による検知と測距”)を用いて路面形状を計測す
るシステムです。センサを車両のルーフなどに取り付け、路面の
凹凸をL i D A Rを用いて計測します。このL i D A Rは、
True-Solid-state方式(可動部を全く搭載しない方式で2mm
以下の超高精度を実現)を採用しており、多点を同時に計測す
ることが可能で、高速走行時でも計測することができます。
特長
True-Solid-state型LiDAR
可動部を持たないマルチビーム方式(三角測量)
2mm以下の高精度で路面の形状(高さ)を測定
秒間180,000点(3000本のビーム×60Hz
サンプリング)の高速高分解能測定
明暗(昼夜)、悪天候(雨、濃霧、雪など)でも
測定可能
車両のロールとピッチを補正
車輪前方の路面情報を300点/秒
でリアルタイム出力が可能
*車輪の中心から5m先、10m先、任意な距離はご相談下さい。
時速250km/hで走行可能
各レーザースポットの反射強度をモニターすることができデータの信頼性を判断できます
対向車両のヘッドライト
(黄色の点群)
測定(緑色の点群)に影響はない リファレンス
5 ■
アプリケーション 3. 路面プロファイルを使ったシミュレーション試験
車両耐久試験に分類される疲労被害度測定(路面からの入力
1. 自動運転車両の開発 とシャシや部品の応力を測定して算出)はさまざまな路面での
試験が要求され、実車を用いて実路を何度も走行するのは非
自動運転車両が安全に走行するためには道路上の走行可能 効率です。本システムで路面プロファイルを取得しシミュレー
エリアと落下物や穴(ポットホール)を検知し回避や停止を行 ションツールにインポートすれば、何度でも車両走行を模擬
う必要があります。そのための路面センシングとして、本システ し、疲労被害度を算出することができます。このようなデータは
ムを利用することができます。 操縦安定性試験や乗り心地試験にも利用することができます。
4. 特異環境試験に対応
雨や霧、雪といった天候条件や、夜間などの日照条件による視
界不良など、実際の交通環境で想定される走行状況を再現し
2. アクティブサスペンションの開発 た室内試験場や実路での試験においても本システムを利用し
車両が路面からの入力を受ける前に車両前方の路面状態を て路面情報を高精度に取得することができます。
認識して制御することで路面からの振動や衝撃を消すことが
できます。
走行速度と操蛇角の情報を車両からCAN通信で入手すること
で本システムは走行する軌跡を計算し、車輪前方の路面の凹
凸をリアルタイム出力できます。
その信号をアクティブサスペンションコントローラに入力して車
両を制御することが可能です。
■ 6
XenoTrack-RT
システム仕様 Front viewモデル Rear viewモデル
走行方向の平均分解能 9mm at 50km/h(速度に比例) 9mm at 50km/h(速度に比例)
横方向の平均分解能 18mm(固定) 18mm(固定)
測定精度(高さ方向) < 2mm at 30km/h(フラットな路面) < 2mm at 30km/h(フラットな路面)
最大計測ポイント数 180,000 点/秒 180,000 点/秒
フレームレート 60Hz 60Hz
リアルタイム出力レート 300 点/秒(1輪あたり) ー
最大走行可能速度(*1) 250km/h 250km/h
視野角(上下方向) 17° 34°
スキャン範囲(*2)(フロントアクスルからの距離) 0m ‒ 13m 2m ‒ 9m後方
最大ステアリング角度(*3) ±7° ±20°
センサ本体サイズ 幅63cm x 奥行き16cm x 高さ11cm 幅63cm x 奥行き16cm x 高さ11cm
重量 約3.7kg(センサ部のみ) 約3.7kg(センサ部のみ)
*1:高速走行の場合システム付属のユニバーサルマウントキットではなく、別途固定方法を検討願います。
*2:センサのマウントに依存。ここで記載の仕様は高さ1mの位置にセンサを設置し10°傾けた場合。
*3:センサのマウントに依存。ここで記載の仕様は幅1.6mの車両のフロントアクスル位置の高さ1mの場所に設置し10°傾けた場合。
データインターフェース
リアルタイム出力 Ethernet
CANインターフェース OBD11 or DB9
オフラインデータ出力 CSV, STL, XRC, XPC, CRG(オプション)
その他のインターフェース GPS, IMU, WebCAM
動作環境
動作温度範囲 0 ‒ 40℃
保管温度 -40 ‒ 80℃
湿度 10 ‒ 90%(結露なきこと)
IP 保護等級 IP65
電源情報
供給電源 12V DC
消費電力(コントローラ) 90W
消費電力(センサ部) 15W
システム構成
アライメントプレートとフレーム
7 ■
XenomatiX N.V.のご紹介
ベルギー・フラームス=ブラバント州ルーヴェンに位置するXenomat iX
N.V(. XenomatiX社)は2013年に設立した計測メーカーで、ADAS(先進
運転支援システム)/自動運転システムの研究開発に用いられる試験計
測用高精度LiDARの開発・製造を行っています。今後はさらにコンパクト
化したLiDARシステムのリリースを計画しており、自動車メーカーやTier1
サプライヤーのシステムや部品と組み合わせた新たなソリューションを展
開して参ります。
製品の特長や事例紹介、動画などのXenomatiX製品の
情報をサイトからご覧いただけます。
http://www.toyo.co.jp/xenomatix
XenomatiX 東陽
オートモーティブ・ソリューション部
〒103-8284 東京都中央区八重洲1-1-6
TEL.03-3279-0771 FAX.03-3246-0645 E-Mail : web-car@toyo.co.jp
www.toyo.co.jp/mecha/
大 阪 支 店 〒532-0003 大阪府大阪市淀川区宮原1-6-1(新大阪ブリックビル) TEL.06-6399-9771 FAX.06-6399-9781
名 古 屋 支 店 〒460-0008 愛知県名古屋市中区栄2-3-1(名古屋広小路ビルヂング) TEL.052-253-6271 FAX.052-253-6448
宇 都 宮 営 業 所 〒321-0953 栃木県宇都宮市東宿郷2-4-3(宇都宮大塚ビル) TEL.028-678-9117 FAX.028-638-5380
電子技術センター 〒103-8284 東京都中央区八重洲1-1-6 TEL.03-3279-0771 FAX.03-3246-0645
※本カタログに記載された商品の機能・性能は断りなく変更されることがあります。
※本カタログに記載されている社名・ロゴは各社の商標及び登録商標です。各社の商標及び登録商標はそれぞれの所有者に帰属します。
XEX-4893-03-1911000-196-1.5-L42-CA