



【東陽テクニカ】被験者の視線を非接触のハードウェアで計測
カメラで撮影した被験者の顔の映像をリアルタイムに画像解析することにより、頭部運動や視線方向、まぶたの開き、瞳孔径などを数値として出力するシステムです。用途に応じて購入するカメラタイプやカメラ数を選択することができます。
【特長】
・非接触での計測
・外部光の影響を受けにくいハードウェア設計
・自由度の高いカメラ配置
・計測範囲の拡張性
・3D仮想空間の構築
・リアルタイム出力
◆詳細はカタログをダウンロードしてご覧下さい。
----------------------------------
関連キーワード:自動車、自動運転、計測ソリューション、計測器、カメラ映像、リアルタイム解析、頭部運動、視線方向、非接触、自動認識機能、仮想空間構築、Smart Recorder、MAPPS、CAN出力オプション、レーザーチェスボード
関連メディア
このカタログについて
| ドキュメント名 | 頭部運動・視線・まぶたのリアルタイム計測 非接触式視線計測システム |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.1Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社東陽テクニカ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
頭部運動、視線、まぶたのリアルタイム計測
非接触式視線計測システム
Page2
非接触式視線計測システム
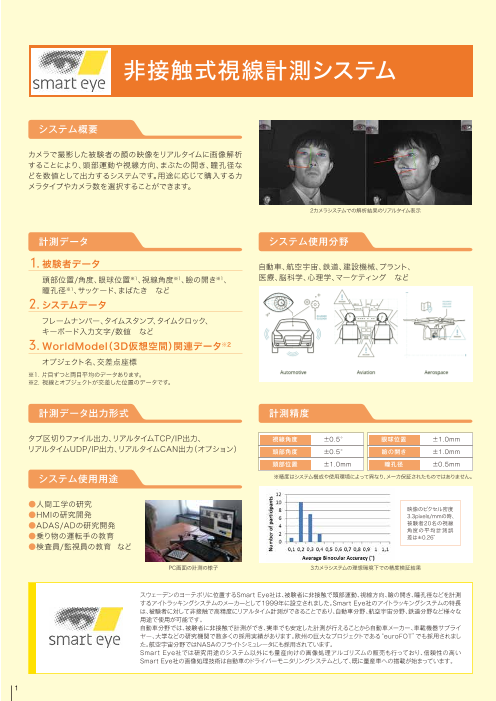
システム概要
カメラで撮影した被験者の顔の映像をリアルタイムに画像解析
することにより、頭部運動や視線方向、まぶたの開き、瞳孔径な
どを数値として出力するシステムです。用途に応じて購入するカ
メラタイプやカメラ数を選択することができます。
2カメラシステムでの解析結果のリアルタイム表示
計測データ システム使用分野
1. 被験者データ 自動車、航空宇宙、鉄道、建設機械、プラント、
頭部位置/角度、眼球位置※1、視線角度※1、瞼の開き※1、 医療、脳科学、心理学、マーケティング など
瞳孔径※1、サッケード、まばたき など
2. システムデータ
フレームナンバー、タイムスタンプ、タイムクロック、
キーボード入力文字/数値 など
3. WorldMode(l 3D仮想空間)関連データ※2
オブジェクト名、交差点座標
※1. 片目ずつと両目平均のデータあります。
※2. 視線とオブジェクトが交差した位置のデータです。
計測データ出力形式 計測精度
タブ区切りファイル出力、リアルタイムTCP/IP出力、 視線角度 ±0.5° 眼球位置 ±1.0mm
リアルタイムUDP/IP出力、リアルタイムCAN出力(オプション) 頭部角度 ±0.5° 瞼の開き ±1.0mm
頭部位置 ±1.0mm 瞳孔径 ±0.5mm
システム使用用途 ※精度はシステム構成や使用環境によって異なり、メーカ保証されたものではありません。
●人間工学の研究
映像のピクセル密度
●HMIの研究開発 3.3pixels/mmの時、
●ADAS/ADの研究開発 被験者20名の視線
角度の平均計測誤
●乗り物の運転手の教育 差は±0.26°
●検査員/監視員の教育 など
PC画面の計測の様子 3カメラシステムの理想環境下での精度検証結果
スウェーデンのヨーテボリに位置するSmart Eye社は、被験者に非接触で頭部運動、視線方向、瞼の開き、瞳孔径などを計測
するアイトラッキングシステムのメーカーとして1999年に設立されました。Smart Eye社のアイトラッキングシステムの特長
は、被験者に対して非接触で高精度にリアルタイム計測ができることであり、自動車分野、航空宇宙分野、鉄道分野など様々な
用途で使用が可能です。
自動車分野では、被験者に非接触で計測ができ、実車でも安定した計測が行えることから自動車メーカー、車載機器サプライ
ヤー、大学などの研究機関で数多くの採用実績があります。欧州の巨大なプロジェクトである“euroFOT”でも採用されまし
た。航空宇宙分野ではNASAのフライトシミュレータにも採用されています。
Smart Eye社では研究用途のシステム以外にも量産向けの画像処理アルゴリズムの販売も行っており、信頼性の高い
Smart Eye社の画像処理技術は自動車のドライバーモニタリングシステムとして、既に量産車への搭載が始まっています。
1
Page3
非接触式視線計測システムの特長
非接触での計測 外部光の影響を受けにくいハードウェア設計
カメラで撮影した被験者の映像をソフトウェア上でリアルタイムに画 計測には波長850nmの近赤外LED光を用います。レンズの先端のフィ
像解析することで計測を行います。被験者が計測のために身につける ルターがこの近赤外LED光以外の波長の光を除去します。このハード
ハードウェアはなく、被験者に物理的な負担を与えることなく自然な ウェア設計によって、外部光の影響を受けにくくなっており、実車走行
状態の頭部運動や視線角度の計測が可能です。 時などの明るさの変化が大きな環境でも安定した計測が可能です。
赤外線LED IEC62471準拠
自由度の高いカメラ配置 計測範囲の拡張性
カメラの設置後にカメラの相対位置関係をシステムに登録するため、 1台のカメラでも計測はできますが、カメラの台数を増やすことで計測
計測環境に合わせてカメラ位置を調整することができ、様々な環境で 範囲を拡張することが可能です。計測範囲に応じてカメラの台数を選
計測が可能なシステム設計になっています。 択します。システム購入後にカメラの増設を行うことも可能です。
2つのカメラで 2つのカメラで 1カメラ 50°
計測 計測
2カメラ 90°
3カメラ 130°
4カメラ 170°
5カメラ 220°
6カメラ 260°
Smart Eye Pro 3cameras 7カメラ 310°
8カメラ 360°
カメラ設置例 水平方向計測範囲の目安
3D仮想空間の構築 リアルタイム出力
ソフトウェア内部に3Dの仮想空間を構築することができます。自動車 計測データを制御PCのHDDに保存するだけでなく、TCP/ IPや
を例にとると、ルームミラーやナビなどの物体を仮想空間内にオブジェ UDP/IPでリアルタイムに外部出力することができます。カメラのシャッ
クトとして定義することが可能です。被験者の視線とオブジェクトが交 タータイミングからデータ出力までの遅延時間は1フレーム(60Hzシス
差するとオブジェクト名や交点の座標を出力することができます。 テムの場合は16.7mS)です。
※出力遅延時間は制御PCのスペックに依存します。
自動車の仮想空間構築例 ソフトウェアのUDP設定画面
2
Page4
Smart Eye Pro DXシステム, Smart Eye Proシステム
Smart Eye社のメインシステムであるSmart Eye Proシステムには大きく3種類あり、
カメラの画素数や大きさなどが異なります。ソフトウェアは全て共通です。
Smart Eye Pro DXシステムはカメラが小型軽量化されており、他の2種類よりもカメラの設置自由度が高くなっています。
画素数が大きいほど、被験者の頭部の動きへの許容範囲が広くなります。
Smart Eye Pro Smart Eye Pro Smart Eye Pro
(1.9メガピクセル)システム (1.3メガピクセル)システム (0.3メガピクセル)システム
カメラモデル Basler daA1600-60um Basler acA1300-75gm Basler acA640-120gm
Basler acA1300-200um
カメラ画素数 1600 pixel × 1200 pixel 1280 pixel × 1024pixel 640 pixel × 480 pixel
カメラ- PC接続インターフェース USB3.0 Ethernet or USB3.0 Ethernet
フレームレート 60Hz 60Hz or 120Hz 60Hz or 120Hz
カメラ台数 1-6台 1-8台(60Hz)/1-6台(120Hz) 1-8台(60Hz)/1-6台(120Hz)
カメラサイズ(幅×高さ×奥行) 31mm×31mm×17mm 28mm×28mm×109mm 28mm×28mm×109mm
頭部位置計測範囲(幅×高さ) 80cm×60cm 64cm×48cm 49cm×37cm
OS:Windows 10
PC推奨スペック
(3カメラシステムの場合) CPU:インテル® Core™ i7-8850H プロセッサー(6 コア, 9MB キャッシュ,2.6GHz)相当
RAM:16GB
カメラとLEDの写真
システム使用時のソフトウェア画面 カメラ設置例
海外のユーザの一部
AUTOMOTIVE INDUSTRY OTHER
■ Audi ■ EuroFOT ■ Korean Electric Power Research Institute ■ Microsoft
■ Autoliv ■ Fiat ■ Shenzhen Nuclear Power Plant ■ NASA
■ BMW ■ GM ■ Lawrence Livemore National Laboratory
■ Continental ■ Volvo
■ DaimlerChrysler ■ Volkswagen
■ Delphi Automotive
3
Page5
システム構成概略図(3カメラ標準構成+Smart Recorde(r 前景重ね描きオプション) + CAN出力)
1 Smart Eye Pro DX Smart Eye Pro
(1.9メガピクセル)システム 2 (1.3メガピクセル:Ethernet)システム
IR-Flash IR-Flash
3 Smart Eye Pro Smart Eye Pro
(1.3メガピクセル:USB)システム 4 (0.3メガピクセル)システム
IR-Flash IR-Flash
Smart Eye XO システム
カメラとLEDが2個ずつ1つの筐体にパッケージ化された廉価版のシステムです。
視線の計測可能範囲は左右方向約土30°、上方向約45°、下方向約25°に限られますが、システム構成が単純であり、
USBケーブル1本をPCに接続することで被験者の頭部運動や視線方向などを計測することができます。
Smart Eye XOシステム
センサモデル CMOS IMX174
カメラ画素数 1920 pixel × 1200 pixel
カメラ- PC接続インターフェース USB3.0
フレームレート 30Hz, 60Hz, 120Hz, 250Hz
カメラ台数 2台
カメラサイズ(幅×高さ×奥行) 146mm x 24mm x 27mm
頭部位置計測範囲(幅×高さ) 61x37cm
OS:Windows 10
PC推奨スペック CPU:インテル® Core™ i7-8850H プロセッサー相当
( 6 コア, 9MB キャッシュ,2.6GHz)
4
Page6
オプション機能
1 Smart Recorder( 前景映像視線重ね描きソフトウェア)
被験者が見ている方向の映像をカメラで撮影し、その映像上に視線を重ね描きするオプションです。
どのような状況で被験者が何を見ていたのかを動画(avi形式)で保存することができます。視線角度と動画の対応設定は計測前に行います。
9点のキャリブレーションポイントを使用する方法と3D仮想空間を使用する方法の2種類があります。
視線と現実世界との対応設定(9点キャリブレーション) 視線と現実世界との対応設定(3D仮想空間)
動画に重ね描きされた視線位置
出力動画のキャプチャ 出力動画のキャプチャ
2 MAPPS(視線重ね描き動画解析ソフトウェア)
Smart Recorderで取得した映像やキャプチャしたスクリーン映像への視線変化を解析するためのオプションです。
動画上に看板や信号などの静的な物体、歩行者や車などの動的な物体をRO(I ROI:Region of Interest)として定義することができ、
被験者がどの物体をどれだけの時間見ていたのかを解析することができます。また、ヒートマップ表示や視線変化の追跡機能などが備わっています。
カラーヒートマップ表示 ROIの解析結果
5
Page7
3 CAN出力
計測データをCANで出力するオプションです。
Vector社のUSB-Dsub9ピン変換機を通して計
測データがPCからCANで出力されます。汎用的
なCANロガーでロギングが可能となり、他のセン
サ信号などと視線情報を同期して計測することが
できます。
CANデータベースファイル(拡張子.dbc)も用意
があります。
CAN出力インターフェース CAN データベースファイル
4 レーザチェスボード
3D仮想空間を作成する際に使用する
ツールです。
チェスボードとレーザ距離計が一体となっ
ており、レーザを照射した点の3次元座標を
求めることができます。使用するレーザは「ク
ラス2」であり、一般的なプレゼンテーション
用のレーザポインタの強度と同等です。
レーザーチェスボードによる位置測定結果
WCS:現在のレーザー照射点の3次元座標 Distance:現在のレーザー照射点とレーザーチェスボードの距離
レーザーチェスボード Diff:現在のレーザー照射点と1つ前のレーザー照射点の3次元座標差 Length:現在のレーザー照射点と1つ前のレーザー照射点の距離
5 波形解析ソフトウェア imc FAMOS
ドイツimc Test & Measurement
GmbH(imc社)の波形解析ソフト
ウェア imc FAMOSは取得した
データの波形表示や演算処理を高
速に行うことができます。また、映像
と数値データの同期表示、レポート FAMOSに
作成、シーケンスによる演算処理の 読み込んだ
データ一覧
自動化を行うことができます。汎用
的なソフトウェアであり、SmartEye
のデータに限らず、他の計測器の 動画のフレームと同期して
バーを動かすことができます。
データを使用することもできます。
定型演算処理ウィンドウを
シーケンスを使用して
作成することができます。
6
Page8
ドライバー運転行動計測システム ~ドライバーの認知/判断/操作を包括的に計測~
本システムはドイツimc 社の車載データロガーでドライバーの視線や頭部
運動、ドライバーの操作に起因するアクセルやブレーキなどの車両のCAN 視線・頭部運動 車内温度
脳波 振動・音声
信号、車両の挙動を捉えるセンサやドライバーの生体情報を計測するセン
サなどのアナログ信号を同時に取得することにより、ドライバーの運転行動 身体挙動 CAN信号
を計測するためのシステムです。imc社の車載データロガーは外部機器制 アクセル・ブレーキ操作
御用のアナログ/デジタル信号出力機能を有しており、光の点灯や振動の発 ECU
生などが可能です。この機能を使用し、ある刺激に対するドライバーの認知/
判断/操作を計測することで、本システムをADASなどのシステムの開発や
改良に応用することもできます。
認知の計測 統合計測と出力制御
ドライバーの視線 車載データロガー
アナログ/デジタル信号を同期して保存
運転中のドライバーの視線や頭部運動を非接触式視線計測システムで計測 メモリカードを用いてPCなしでも動作
判断/操作の計測
制御ソフトウェア
ドライバーの操作 車の挙動 信号
(アクセル操作など) (六分力計や加速度計など) 入力
ドライバーのアクセル/ブレーキなどの 車の挙動を
操作を車のCANから計測 センサで計測 入力信号に対する出力の設定やリアルタイムでのデータモニタリング
任意の刺激に対する 入力信号に対する
ドライバーの反応を計測 ドライバーへの刺激信号を出力
ドライバーへの刺激
ド光ラのイ点バ灯ーの視線 音声の再生 振動の発生 ディスプレイ表示
機械計測部
〒103-8284 東京都中央区八重洲1-1-6
TEL.03-3279-0771 FAX.03-3246-0645 E-Mail : web-car@toyo.co.jp
http://www.toyo.co.jp/mecha/
大 阪 支 店 〒532-0003 大阪府大阪市淀川区宮原1-6-1(新大阪ブリックビル) TEL.06-6399-9771 FAX.06-6399-9781
名 古 屋 支 店 〒460-0008 愛知県名古屋市中区栄2-3-1(名古屋広小路ビルヂング) TEL.052-253-6271 FAX.052-253-6448
宇 都 宮 営 業 所 〒321-0953 栃木県宇都宮市東宿郷2-4-3(宇都宮大塚ビル) TEL.028-678-9117 FAX.028-638-5380
電子技術センター 〒103-8284 東京都中央区八重洲1-1-6 TEL.03-3279-0771 FAX.03-3246-0645 JQA-EM4908 JQA-QM8795
テクノロジーインターフェースセンター 〒103-0021 東京都中央区日本橋本石町1-1-2 TEL.03-3279-0771 FAX.03-3246-0645 技術センター
※本カタログに記載された商品の機能・性能は断りなく変更されることがあります。
※本カタログに記載されている社名・ロゴは各社の商標及び登録商標です。各社の商標及び登録商標はそれぞれの所有者に帰属します。
SMA-4652-03-2004000-300-1.0-L42-CA