



”ちょうどいい自動化” はつくれる!もっと「現場にちょうどいい」ロボットを。
5種類の内製したモジュールを例に、ロボット内製に適した様々な製品を紹介!
<こんな方におすすめ>
・自社に合ったロボットが見つからない
・ロボットの内製経験がない
・プログラミングに抵抗がある
自社で設計・開発しきれない…というお悩みには、オリエンタルモーターの小型・薄型でシンプル・簡単な産業用ロボットOVRで、素早く自動化するアイデアもご提案しています。
関連メディア
このカタログについて
| ドキュメント名 | 自社に最適な生産工程づくりのヒント[G-223] |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 4.7Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
モジュール
5 AGV/AMR
バッテリ駆動対応
バッテリ駆動対応 同期運転による位置調整
高精度停止でワーク載せ替え 電動スライダ “ちょうどいい自動化”は作れる!
停止時ワーク保持 EZSシリーズ
EZSM4RD025AZAK
AZシリーズ DC電源入力 EZSM4LD025AZAK
AZM66AKH-TS7.2U miniドライバ
miniドライバ AZD-KR2D
AZD-KR2D 自社に最適な
バッテリ駆動対応
1r/min から制御できる車輪駆動軸で 生産工程づくりのヒント
速度安定、滑らか起動・停止
小型ドライバで ブラシレスモーター
制御盤スペース削減、小型化 BLVシリーズ Rタイプ
ブラシレスモーター BLMR5100K-30FR-B
BLVシリーズ Rタイプ BLVD-KRD
AZシリーズ
miniドライバ DC24 ~ 48Vのバッテリに対応
●CiA®、CANopen® は CAN in Auto-
mation e.V. の登録商標です。
デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。 ●Modbus は Schneider Automation
Inc. の登録商標です。
Hint 省スペース
環境に合わせた搬送ロボット・台車上ロボット製作
安定した走行、狭い通路での方向転換、低床性や小型・軽量性が求められる搬送台車の自動化。バケット移載、加工など、台車上の自動化も含め、
バッテリ駆動対応の小型・軽量モーター、ドライバで実現できます。
●バッテリ駆動対応ブラシレスモーターBLVシリーズ Rタイプ ●安定走行、停止、回避
コンパクト設置、車輪直結可能なモーター・ギヤ モーター軸で1r/minからの速度制御が行え、左右駆動
ワークの大型化、ロボットやコンベヤの搭載を可能にする耐荷重性能があります。 輪の速度差を大きくして小回りを利かせた運転が可能
です。また、滑らかな起動・停止を実現します。
天面取付 フランジ出力ヘッド
許容ラジアル荷重 ≪レイアウト例≫ BLVシリーズ
Rタイプ 1~4000r/min 1:4000
1500N(153kgf) 1 80 4000
分解能の向上でより正確な、位置決め運転が可能
側面取付 中空軸フラットギア
分解能
(目標位置)
許容ラジアル荷重 位置決め運転時の停止精度
最大 2040N(208kgf) モーター軸上で±0.72°、ギヤヘッド出力軸上では1~2°程度
●このカタログに記載している会社名および商品の名称は、それぞれの会社が所有する商標または登録商標です。
● 、 、 、ABZOセンサは、 お問い合わせ先
日本その他の国におけるオリエンタルモーター株式会社の登録商標または商標です。
お客様ご相談センター
製品に関する技術的なお問い合わせ、購入についてのご相談はこちらまで。
TEL 0120-925-410 E-mail webts@orientalmotor.co.jp
ちょうどいい自動化 検索
www.o r i en t a lmo t o r. c o . j p / j a 2025年6月制作 © 2024-2025 Copyright ORIENTAL MOTOR CO., LTD. G-223-2
8
Page2
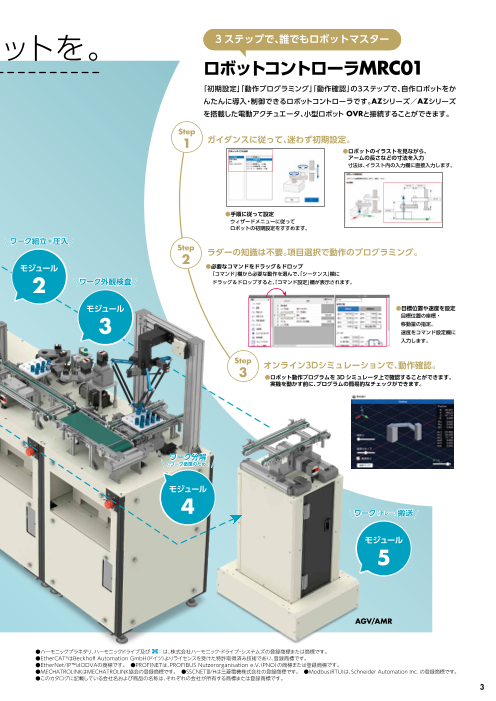
もっと「現場にちょうどいい」ロボットを。 3 ステップで、誰でもロボットマスター
ロボットコントローラMRC01
自社に最適な生産工程づくりのヒント 「初期設定」「動作プログラミング」「動作確認」の3ステップで、自作ロボットをか
んたんに導入・制御できるロボットコントローラです。AZシリーズ/AZシリーズ
あらゆる生産現場でロボットの需要が増加している現在、既存生産ラインへのロボット設置など、 を搭載した電動アクチュエータ、小型ロボット OVRと接続することができます。
市販産業ロボットでは難しい自社の実情に合ったロボットを求める声も少なくありません。 Step
こうした課題に応え、オリエンタルモーターではそれぞれの企業に合わせた生産工程づくりをご提案。 1 ガイダンスに従って、迷わず初期設定。
●ロボットのイラストを見ながら、
アームの長さなどの寸法を入力
製造ラインを模した5つの装置モジュールによるデモンストレーションで、 寸法は、イラスト内の入力欄に直接入力します。
自動化における「コスト低減」「プログラミング負荷軽減」「省スペース化」を実現するヒントをお届けします。
ワーク投入+整列
●手順に従って設定
ウィザードメニューに従って
デモ機の モジュール ロボットの初期設定をすすめます。
1 ワーク組立+圧入
構成 Step ラダーの知識は不要。項目選択で動作のプログラミング。
2
モジュール ●必要なコマンドをドラッグ&ドロップ
「コマンド」欄から必要な動作を選んで、「シーケンス」欄に
保守費用 復旧までの 部品単位での メンテナンス
削減 時間短縮 保守 フリー 2 ワーク外観検査 ドラッグ&ドロップすると、「コマンド設定」欄が表示されます。
モジュール ●目標位置や速度を設定
「作りたい」を応援するモーター、アクチュエータ 目標位置の座標・
3 移動量の指定、
速度をコマンド設定欄に
AZ シリーズの製品群 入力します。
バッテリレスアブソリュートセンサ(ABZOセンサ)を搭載し、同じインターフェイス(配線) Step オンライン3Dシミュレーションで、動作確認。
を持つ制御モーター、電動アクチュエータです。配線・制御・保守部品を統一でき、業務負 3 ●ロボット動作プログラムを 3Dシミュレータ上で確認することができます。
実機を動かす前に、プログラムの簡易的なチェックができます。
荷軽減と時短を実現しました。これからの自動化におすすめの製品群です。
AZ シリーズ ワーク循環
バッテリレス
多回転アブソリュートセンサ搭載
ワーク分解
(ワーク循環のため )
単軸ドライバ miniドライバ 多軸ドライバ
モジュール
ABZOセンサ 4 ワーク(トレー ) 搬送
モーター
AZ シリーズ搭載電動アクチュエータ 関連商品 モジュール
5
単軸ドライバ
電動スライダ 電動シリンダ コンパクト電動シリンダ
EZSシリーズ EACシリーズ DRシリーズ/
DRS2シリーズ
モーター
AGV/AMR
中空ロータリー 電動グリッパ ラック・ピニオンシステム サーボモーター
アクチュエータ EHシリーズ Lシリーズ/ AZXシリーズ
DGⅡシリーズ LJリニアヘッド
●ハーモニックプラネタリ、ハーモニックドライブ及び は、株式会社ハーモニック・ドライブ・システムズの登録商標または商標です。
●EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
●製品によって使用できるドライバが異なります。 ●EtherNet/IP™はODVAの商標です。 ●PROFINETは、PROFIBUS Nutzerorganisation e.V(. PNO)の商標または登録商標です。
●MECHATROLINKはMECHATROLINK協会の登録商標です。 ●SSCNETⅢ/Hは三菱電機株式会社の登録商標です。 ●Modbus(RTU)は、Schneider Automation Inc. の登録商標です。
●このカタログに記載している会社名および商品の名称は、それぞれの会社が所有する商標または登録商標です。
2 3
Page3
もっと「現場にちょうどいい」ロボットを。 3 ステップで、誰でもロボットマスター
ロボットコントローラMRC01
自社に最適な生産工程づくりのヒント 「初期設定」「動作プログラミング」「動作確認」の3ステップで、自作ロボットをか
んたんに導入・制御できるロボットコントローラです。AZシリーズ/AZシリーズ
あらゆる生産現場でロボットの需要が増加している現在、既存生産ラインへのロボット設置など、 を搭載した電動アクチュエータ、小型ロボット OVRと接続することができます。
市販産業ロボットでは難しい自社の実情に合ったロボットを求める声も少なくありません。 Step
こうした課題に応え、オリエンタルモーターではそれぞれの企業に合わせた生産工程づくりをご提案。 1 ガイダンスに従って、迷わず初期設定。
●ロボットのイラストを見ながら、
アームの長さなどの寸法を入力
製造ラインを模した5つの装置モジュールによるデモンストレーションで、 寸法は、イラスト内の入力欄に直接入力します。
自動化における「コスト低減」「プログラミング負荷軽減」「省スペース化」を実現するヒントをお届けします。
ワーク投入+整列
●手順に従って設定
ウィザードメニューに従って
デモ機の モジュール ロボットの初期設定をすすめます。
1 ワーク組立+圧入
構成 Step ラダーの知識は不要。項目選択で動作のプログラミング。
2
モジュール ●必要なコマンドをドラッグ&ドロップ
「コマンド」欄から必要な動作を選んで、「シーケンス」欄に
保守費用 復旧までの 部品単位での メンテナンス
削減 時間短縮 保守 フリー 2 ワーク外観検査 ドラッグ&ドロップすると、「コマンド設定」欄が表示されます。
モジュール ●目標位置や速度を設定
「作りたい」を応援するモーター、アクチュエータ 目標位置の座標・
3 移動量の指定、
速度をコマンド設定欄に
AZ シリーズの製品群 入力します。
バッテリレスアブソリュートセンサ(ABZOセンサ)を搭載し、同じインターフェイス(配線) Step オンライン3Dシミュレーションで、動作確認。
を持つ制御モーター、電動アクチュエータです。配線・制御・保守部品を統一でき、業務負 3 ●ロボット動作プログラムを 3Dシミュレータ上で確認することができます。
実機を動かす前に、プログラムの簡易的なチェックができます。
荷軽減と時短を実現しました。これからの自動化におすすめの製品群です。
AZ シリーズ ワーク循環
バッテリレス
多回転アブソリュートセンサ搭載
ワーク分解
(ワーク循環のため )
単軸ドライバ miniドライバ 多軸ドライバ
モジュール
ABZOセンサ 4 ワーク(トレー ) 搬送
モーター
AZ シリーズ搭載電動アクチュエータ 関連商品 モジュール
5
単軸ドライバ
電動スライダ 電動シリンダ コンパクト電動シリンダ
EZSシリーズ EACシリーズ DRシリーズ/
DRS2シリーズ
モーター
AGV/AMR
中空ロータリー 電動グリッパ ラック・ピニオンシステム サーボモーター
アクチュエータ EHシリーズ Lシリーズ/ AZXシリーズ
DGⅡシリーズ LJリニアヘッド
●ハーモニックプラネタリ、ハーモニックドライブ及び は、株式会社ハーモニック・ドライブ・システムズの登録商標または商標です。
●EtherCAT®はBeckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり、登録商標です。
●製品によって使用できるドライバが異なります。 ●EtherNet/IP™はODVAの商標です。 ●PROFINETは、PROFIBUS Nutzerorganisation e.V(. PNO)の商標または登録商標です。
●MECHATROLINKはMECHATROLINK協会の登録商標です。 ●SSCNETⅢ/Hは三菱電機株式会社の登録商標です。 ●Modbus(RTU)は、Schneider Automation Inc. の登録商標です。
●このカタログに記載している会社名および商品の名称は、それぞれの会社が所有する商標または登録商標です。
2 3
Page4
モジュール
1 ワーク投入+整列 モジュール
2 ワーク組立+圧入
画像センサ情報取り込みで
ワーク判定&整列
AZシリーズモーターを利用した
セルフメンテナンスできるロボット ロボットコントローラ パレタイジング機能で
MRC01 プログラム工数大幅削減 高剛性で片持ち機構を実現
モーター部折り返しで省スペース化
小型ロボット OVR MRC Studio(設定ソフト) ロボットコントローラ
5軸垂直多関節 MRC01 電動スライダ
OVR5035K1-V MRC Studio(設定ソフト) EZSシリーズ
X軸:EZSM6D015AZAK
Y軸:EZSM4RD015AZAK
Z軸:EZSM3LD005AZMK
ロボットケーブル配線に
活用できる大口径中空構造
増大する負担モーメントに耐える
高強度・高剛性
中空ロータリーアクチュエータ
DGⅡシリーズ
DGB130R36-AZAKL
狭い場所での把持に
狭い場所での昇降 電動グリッパ 微細位置決め・運転電流 0.1%単位の
電動スライダ 円形ワーク把持が得意な三つ爪機構 EHシリーズ 細かなトルク調整で圧入
EZSシリーズ EH4-AZAKH
EZSM3RD005AZMK 電動グリッパ コンパクト電動シリンダ
EHシリーズ DRS2シリーズ
EH4T-AZAKH DRSM42LG-04A2AZMK
デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。 デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。
Hint コスト削減 Hint プログラム工数削減
セルフメンテナンスできる システム構成費の低減 ラダーレスコントローラでプログラミング負荷低減
ロボットの検討 複数軸が連動する装置はプログラミング・制御の難易度が高く、ロボットを製作するハードルになっています。オリエンタルモーターでは、
ロボットに故障が発生した場合、メーカーやSIerの保守対応を AZシリーズモーターで構成されたロボットの場合、ロボットコ 設計負荷を軽減するモーター・アクチュエータだけでなく、制御が容易なコントローラ・プログラミングソフトを提供。工数を削減し「作り
行うことが一般的で時間やコストが発生します。コスト低減の ントローラMRC01により、比較的安価なシステム構成費でロ たい」を支援します。
アイデアとして、自らメンテナンスできるロボットの導入、ロ ボットビジョンシステムを構築できます。
ボット自体の内製化があります。 ●ロボット未経験者でもすぐにプログラム・制御 ●パレタイジング機能で
ロボットコントローラMRC01×AZシリーズ搭載機構 プログラム工数大幅削減
●コントローラMRC01でかんたんにロボットを制御 ●設計不要で 無償 MRC01では、セルの数、パレット寸法、動
キャリブレーション機能搭載でビジョンセンサ連携が容易に セルフメンテナンス可能なロボット ダウン ロボットに必要な
ロード 作経路もイラストを見ながら直感的に設
動作コマンドを 定可能。パレタイジングの専用コマンドで
■カメラでワークの位置・角度情報を取得 ■ロボットの座標に変換して運転 垂直多関節ロボット アイコンで選択するだけ プログラム行数を大幅に削減でき、コー
無償
ダウン 水平最大リーチ長 :480、680、880mm ディング、デバッグの時短に貢献します。
ロード 定価:110 万~140 万円
USB接続
AZシリーズ/AZシリーズ搭載 ロボットコントローラ プログラミングソフト
RS プログラミングソフト アクチュエータを使用した MRC01 MRC Studio
画像処理機器 -485 MRC Studio
(株式会社キーエンス CV-Xシリーズ) 通 自作ロボット
ロボットコントローラ 信 小型ロボット OVR
MRC01
≪対応ロボット≫
垂直多関節 水平多関節(スカラ) 直交 OVR エンドエフェクタ
Z Z Z Z Z
ワークの位置・角度 ワークの位置・角度
■平行リンク機構のロボットアーム X Y X Y X Y X Y X Y
■部品を常時水平にした状態で安定搬送
■モーター、アーム交換が可能 3リンク 3リンク 2リンク 2リンク
ベース軸旋回+Rz軸 ベース軸直動+Rz軸 先端軸昇降+Rz軸 ベース軸昇降+Rz軸 X-Y-Z OVRパンフレットを
ご覧ください 直動/グリッパ 回転
小型ロボット OVR ■ISO9409 準拠のエンドエフェクタに対応 その他:3リンク ベース軸なし、 その他:2リンク 昇降軸なし、2リンク先端軸昇降、 その他:X-Y、
3リンク ベース軸旋回、3リンク ベース軸直動 2リンク ベース軸昇降、2リンク 昇降軸なし+Rz軸 X-Z、Y-Z ー ー
PLC
4 5
Page5
モジュール
1 ワーク投入+整列 モジュール
2 ワーク組立+圧入
画像センサ情報取り込みで
ワーク判定&整列
AZシリーズモーターを利用した
セルフメンテナンスできるロボット ロボットコントローラ パレタイジング機能で
MRC01 プログラム工数大幅削減 高剛性で片持ち機構を実現
モーター部折り返しで省スペース化
小型ロボット OVR MRC Studio(設定ソフト) ロボットコントローラ
5軸垂直多関節 MRC01 電動スライダ
OVR5035K1-V MRC Studio(設定ソフト) EZSシリーズ
X軸:EZSM6D015AZAK
Y軸:EZSM4RD015AZAK
Z軸:EZSM3LD005AZMK
ロボットケーブル配線に
活用できる大口径中空構造
増大する負担モーメントに耐える
高強度・高剛性
中空ロータリーアクチュエータ
DGⅡシリーズ
DGB130R36-AZAKL
狭い場所での把持に
狭い場所での昇降 電動グリッパ 微細位置決め・運転電流 0.1%単位の
電動スライダ 円形ワーク把持が得意な三つ爪機構 EHシリーズ 細かなトルク調整で圧入
EZSシリーズ EH4-AZAKH
EZSM3RD005AZMK 電動グリッパ コンパクト電動シリンダ
EHシリーズ DRS2シリーズ
EH4T-AZAKH DRSM42LG-04A2AZMK
デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。 デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。
Hint コスト削減 Hint プログラム工数削減
セルフメンテナンスできる システム構成費の低減 ラダーレスコントローラでプログラミング負荷低減
ロボットの検討 複数軸が連動する装置はプログラミング・制御の難易度が高く、ロボットを製作するハードルになっています。オリエンタルモーターでは、
ロボットに故障が発生した場合、メーカーやSIerの保守対応を AZシリーズモーターで構成されたロボットの場合、ロボットコ 設計負荷を軽減するモーター・アクチュエータだけでなく、制御が容易なコントローラ・プログラミングソフトを提供。工数を削減し「作り
行うことが一般的で時間やコストが発生します。コスト低減の ントローラMRC01により、比較的安価なシステム構成費でロ たい」を支援します。
アイデアとして、自らメンテナンスできるロボットの導入、ロ ボットビジョンシステムを構築できます。
ボット自体の内製化があります。 ●ロボット未経験者でもすぐにプログラム・制御 ●パレタイジング機能で
ロボットコントローラMRC01×AZシリーズ搭載機構 プログラム工数大幅削減
●コントローラMRC01でかんたんにロボットを制御 ●設計不要で 無償 MRC01では、セルの数、パレット寸法、動
キャリブレーション機能搭載でビジョンセンサ連携が容易に セルフメンテナンス可能なロボット ダウン ロボットに必要な
ロード 作経路もイラストを見ながら直感的に設
動作コマンドを 定可能。パレタイジングの専用コマンドで
■カメラでワークの位置・角度情報を取得 ■ロボットの座標に変換して運転 垂直多関節ロボット アイコンで選択するだけ プログラム行数を大幅に削減でき、コー
無償
ダウン 水平最大リーチ長 :480、680、880mm ディング、デバッグの時短に貢献します。
ロード 定価:110 万~140 万円
USB接続
AZシリーズ/AZシリーズ搭載 ロボットコントローラ プログラミングソフト
RS プログラミングソフト アクチュエータを使用した MRC01 MRC Studio
画像処理機器 -485 MRC Studio
(株式会社キーエンス CV-Xシリーズ) 通 自作ロボット
ロボットコントローラ 信 小型ロボット OVR
MRC01
≪対応ロボット≫
垂直多関節 水平多関節(スカラ) 直交 OVR エンドエフェクタ
Z Z Z Z Z
ワークの位置・角度 ワークの位置・角度
■平行リンク機構のロボットアーム X Y X Y X Y X Y X Y
■部品を常時水平にした状態で安定搬送
■モーター、アーム交換が可能 3リンク 3リンク 2リンク 2リンク
ベース軸旋回+Rz軸 ベース軸直動+Rz軸 先端軸昇降+Rz軸 ベース軸昇降+Rz軸 X-Y-Z OVRパンフレットを
ご覧ください 直動/グリッパ 回転
小型ロボット OVR ■ISO9409 準拠のエンドエフェクタに対応 その他:3リンク ベース軸なし、 その他:2リンク 昇降軸なし、2リンク先端軸昇降、 その他:X-Y、
3リンク ベース軸旋回、3リンク ベース軸直動 2リンク ベース軸昇降、2リンク 昇降軸なし+Rz軸 X-Z、Y-Z ー ー
PLC
4 5
Page6
モジュール モジュール
3 ワーク外観検査 4 ワーク分解
AZシリーズとボールねじを一体化した
他の機構と干渉しない 3リンク構造 アクチュエータで省スペース・軽量に パラレルリンク制御に対応
配線を中空部に逃がした低床設計 コンパクト電動シリンダ 俊敏な動作で
中空ロータリーアクチュエータ DRシリーズ 高頻度タクトタイムを実現 取付角 30mm
DGⅡシリーズ DR28T2.5BC03-AZAKL ハーモニックギヤードタイプモーターで
軸1:DGB85R36-AZAKR DR28T2.5BC03-AZAKR ロボットコントローラ
軸2:DGM60-AZAK MRC01 高精度化、小型・軽量化
軸3:DGM60-AZAK MRC Studio(設定ソフト) AZシリーズ
AZM24AK-HS50
ノンバックラッシギヤで
軸先端のズレ解消
参考:ハーモニックギヤ
AZM24AK-HS50 相当品
AZM46AKH-HS50 相当品 小型・省エネ、安定した速度と
設定ダイヤルで簡単操作 ワーク把持調整のための
ブラシレスモーター コンベヤの隙間に入る昇降、
BMUシリーズ 旋回機構
Z軸を基部に配置 BLM230HP-10S
狭い場所での把持に BMUD30-A2 昇降:電動スライダEZSシリーズ
ヘッド先端軽量化 EZSM3RD005AZMK
電動グリッパ
ラック・ピニオンシステム 旋回: AZシリーズ
EHシリーズ
Lシリーズ AZ搭載 AZM66AKH
EH4-AZAKH
LM2F200AZMK-1
デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。 デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。
Hint 省スペース Hint 省スペース
自社設備に合わせたコンパクト・低床自動機を検討 高頻度運転・卓上サイズのパラレルリンクロボット製作
産業用ロボット横や、すでにある装置の中など、スペースに制限がある中でさらに自動化を進め効率化を図るなら、その設備に合わせてコン 市販ロボットにない小型のパラレルリンクロボット。小型モーターの組み合わせと、ロボットコントローラMRC01で実現できます。小さ
パクトなロボットを設計・導入するのもアイデアのひとつ。完成されたロボット製品にはできない、痒い所に手が届くロボット製作を検討し いワークのハンドリングに高速・高精度の位置決めを検討してみませんか。
てみませんか。
●取付角30mmの小型モーター3台の組み合わせで装置小型化
●電動アクチュエータ活用で低床設計に ●小型ドライバ、小型コントローラが
制御部の省スペース化を実現
多軸構成でも省スペース化できる小型のドラ 質量 ■停止位置を自己保持
コンパクト設計のモーター・アク イバをラインアップしています。 0.24 ㎏ ■剛性が高くねじれに強い
206mm チュエータで低床な水平多関節 ■慣性負荷が大きい場合や、加減速時間が短い場合は、標準モーター
ロボットを構成できます。 よりもギヤードモーターのほうが、安定して駆動できます
61mm
79mm
30mm AZM24AK-HS50
100mm
●ロボットコントローラMRC01が
パラレルリンクロボットに対応
高速かつ精度の高い位置決め動作を実現
Z軸を基部に搭載することでヘッド先端の軽量化を ウィザードに従って設定するだけで、パラレルリンクの
実現。X軸の動きも追加すれば、アームのリーチを変 動作を設定可能です。
えずに可動範囲を広げることも可能です。
6 7
Page7
モジュール モジュール
3 ワーク外観検査 4 ワーク分解
AZシリーズとボールねじを一体化した
他の機構と干渉しない 3リンク構造 アクチュエータで省スペース・軽量に パラレルリンク制御に対応
配線を中空部に逃がした低床設計 コンパクト電動シリンダ 俊敏な動作で
中空ロータリーアクチュエータ DRシリーズ 高頻度タクトタイムを実現 取付角 30mm
DGⅡシリーズ DR28T2.5BC03-AZAKL ハーモニックギヤードタイプモーターで
軸1:DGB85R36-AZAKR DR28T2.5BC03-AZAKR ロボットコントローラ
軸2:DGM60-AZAK MRC01 高精度化、小型・軽量化
軸3:DGM60-AZAK MRC Studio(設定ソフト) AZシリーズ
AZM24AK-HS50
ノンバックラッシギヤで
軸先端のズレ解消
参考:ハーモニックギヤ
AZM24AK-HS50 相当品
AZM46AKH-HS50 相当品 小型・省エネ、安定した速度と
設定ダイヤルで簡単操作 ワーク把持調整のための
ブラシレスモーター コンベヤの隙間に入る昇降、
BMUシリーズ 旋回機構
Z軸を基部に配置 BLM230HP-10S
狭い場所での把持に BMUD30-A2 昇降:電動スライダEZSシリーズ
ヘッド先端軽量化 EZSM3RD005AZMK
電動グリッパ
ラック・ピニオンシステム 旋回: AZシリーズ
EHシリーズ
Lシリーズ AZ搭載 AZM66AKH
EH4-AZAKH
LM2F200AZMK-1
デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。 デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。
Hint 省スペース Hint 省スペース
自社設備に合わせたコンパクト・低床自動機を検討 高頻度運転・卓上サイズのパラレルリンクロボット製作
産業用ロボット横や、すでにある装置の中など、スペースに制限がある中でさらに自動化を進め効率化を図るなら、その設備に合わせてコン 市販ロボットにない小型のパラレルリンクロボット。小型モーターの組み合わせと、ロボットコントローラMRC01で実現できます。小さ
パクトなロボットを設計・導入するのもアイデアのひとつ。完成されたロボット製品にはできない、痒い所に手が届くロボット製作を検討し いワークのハンドリングに高速・高精度の位置決めを検討してみませんか。
てみませんか。
●取付角30mmの小型モーター3台の組み合わせで装置小型化
●電動アクチュエータ活用で低床設計に ●小型ドライバ、小型コントローラが
制御部の省スペース化を実現
多軸構成でも省スペース化できる小型のドラ 質量 ■停止位置を自己保持
コンパクト設計のモーター・アク イバをラインアップしています。 0.24 ㎏ ■剛性が高くねじれに強い
206mm チュエータで低床な水平多関節 ■慣性負荷が大きい場合や、加減速時間が短い場合は、標準モーター
ロボットを構成できます。 よりもギヤードモーターのほうが、安定して駆動できます
61mm
79mm
30mm AZM24AK-HS50
100mm
●ロボットコントローラMRC01が
パラレルリンクロボットに対応
高速かつ精度の高い位置決め動作を実現
Z軸を基部に搭載することでヘッド先端の軽量化を ウィザードに従って設定するだけで、パラレルリンクの
実現。X軸の動きも追加すれば、アームのリーチを変 動作を設定可能です。
えずに可動範囲を広げることも可能です。
6 7
Page8
モジュール
5 AGV/AMR
バッテリ駆動対応
バッテリ駆動対応 同期運転による位置調整
高精度停止でワーク載せ替え 電動スライダ “ちょうどいい自動化”は作れる!
停止時ワーク保持 EZSシリーズ
EZSM4RD025AZAK
AZシリーズ DC電源入力 EZSM4LD025AZAK
AZM66AKH-TS7.2U miniドライバ
miniドライバ AZD-KR2D
AZD-KR2D 自社に最適な
バッテリ駆動対応
1r/min から制御できる車輪駆動軸で 生産工程づくりのヒント
速度安定、滑らか起動・停止
小型ドライバで ブラシレスモーター
制御盤スペース削減、小型化 BLVシリーズ Rタイプ
ブラシレスモーター BLMR5100K-30FR-B
BLVシリーズ Rタイプ BLVD-KRD
AZシリーズ
miniドライバ DC24 ~ 48Vのバッテリに対応
●CiA®、CANopen® は CAN in Auto-
mation e.V. の登録商標です。
デモンストレーション機器の構成品一覧、仕様の資料をご用意しております。 ●Modbus は Schneider Automation
Inc. の登録商標です。
Hint 省スペース
環境に合わせた搬送ロボット・台車上ロボット製作
安定した走行、狭い通路での方向転換、低床性や小型・軽量性が求められる搬送台車の自動化。バケット移載、加工など、台車上の自動化も含め、
バッテリ駆動対応の小型・軽量モーター、ドライバで実現できます。
●バッテリ駆動対応ブラシレスモーターBLVシリーズ Rタイプ ●安定走行、停止、回避
コンパクト設置、車輪直結可能なモーター・ギヤ モーター軸で1r/minからの速度制御が行え、左右駆動
ワークの大型化、ロボットやコンベヤの搭載を可能にする耐荷重性能があります。 輪の速度差を大きくして小回りを利かせた運転が可能
です。また、滑らかな起動・停止を実現します。
天面取付 フランジ出力ヘッド
許容ラジアル荷重 ≪レイアウト例≫ BLVシリーズ
Rタイプ 1~4000r/min 1:4000
1500N(153kgf) 1 80 4000
分解能の向上でより正確な、位置決め運転が可能
側面取付 中空軸フラットギア
分解能
(目標位置)
許容ラジアル荷重 位置決め運転時の停止精度
最大 2040N(208kgf) モーター軸上で±0.72°、ギヤヘッド出力軸上では1~2°程度
●このカタログに記載している会社名および商品の名称は、それぞれの会社が所有する商標または登録商標です。
● 、 、 、ABZOセンサは、 お問い合わせ先
日本その他の国におけるオリエンタルモーター株式会社の登録商標または商標です。
お客様ご相談センター
製品に関する技術的なお問い合わせ、購入についてのご相談はこちらまで。
TEL 0120-925-410 E-mail webts@orientalmotor.co.jp
ちょうどいい自動化 検索
www.o r i en t a lmo t o r. c o . j p / j a 2025年6月制作 © 2024-2025 Copyright ORIENTAL MOTOR CO., LTD. G-223-2
8