



【まるで指先のようなデリケートな掴みを実現】電動グリッパEHシリーズ
人の指先のようなデリケートな「つかみ」を実現し、
自動化・省人化をお手伝いします。
「つかむ」「揃える」「測定する」工程を自動化!
※詳しくはPDF資料をご覧いただくか、お気軽にお問い合わせ下さい。
関連メディア
このカタログについて
| ドキュメント名 | 電動グリッパ EHシリーズ パンフレット |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.7Mb |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
デリケートな「つかみ」を実現
3つ爪タイプも新登場。
電動グリッパ
EHシリーズ
AZシリーズ搭載
2つ爪タイプ・3つ爪タイプ
人の指先のようなデリケートな「つかみ」を実現し、
自動化・省人化をお手伝いします。
詳 細 は こ ち ら
つかむ
傷つきやすく、
変形しやすいワークの
把持が可能。
そろえる 測定する
ワークの向きそろえ、 ワークの大きさ判定、
位置そろえが可能。 大きさ測定が可能。
● アタッチメント(ツメ)は別途ご用意ください。
Page2
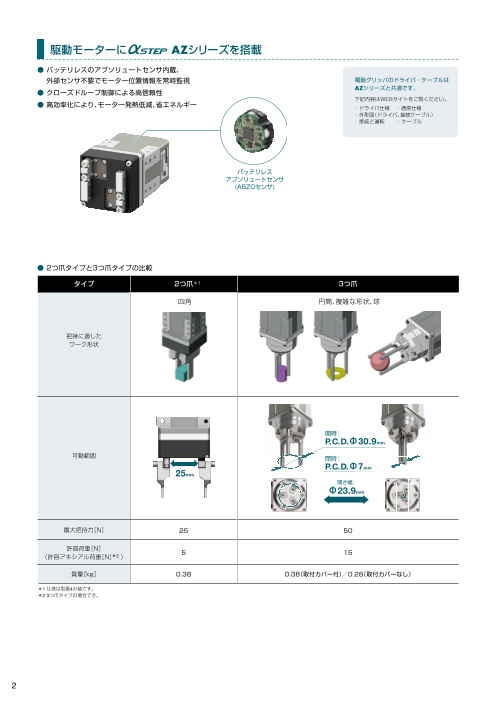
駆動モーターに AZシリーズを搭載
● バッテリレスのアブソリュートセンサ内蔵、
外部センサ不要でモーター位置情報を常時監視 電動グリッパのドライバ・ケーブルは
AZシリーズと共通です。
● クローズドループ制御による高信頼性
下記内容はWEBサイトをご覧ください。
● 高効率化により、モーター発熱低減、省エネルギー ・ ドライバ仕様 ・通信仕様
・ 外形図(ドライバ、接続ケーブル)
・ 接続と運転 ・ ケーブル
バッテリレス
アブソリュートセンサ
(ABZOセンサ)
● 2つ爪タイプと3つ爪タイプの比較
タイプ 2つ爪*1 3つ爪
四角 円筒、複雑な形状、球
把持に適した
ワーク形状
開時:
P.C.D.Φ30.9mm
可動範囲 閉時:
P.C.D.Φ7mm
25mm
開き幅:
Φ23.9mm
最大把持力[N] 25 50
許容荷重[N]
5 15
(許容アキシアル荷重[N]* 2 )
質量[kg] 0.38 0.38(取付カバー付)/0.28(取付カバーなし)
*1 仕様は型番4の値です。
*2 3つ爪タイプの場合です。
2
Page3
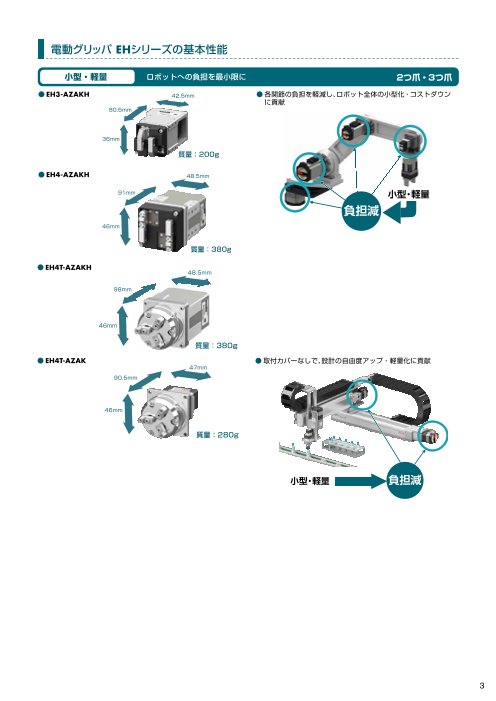
電動グリッパ EHシリーズの基本性能
小型・軽量 ロボットへの負担を最小限に 2つ爪・3つ爪
● EH3-AZAKH 42.5mm ● 各関節の負担を軽減し、ロボット全体の小型化・コストダウン
に貢献
80.5mm
36mm
質量:200g
● EH4-AZAKH 48.5mm
91mm 小型・軽量
負担減
46mm
質量:380g
● EH4T-AZAKH
48.5mm
98mm
46mm
質量:380g
● EH4T-AZAK ● 取付カバーなしで、設計の自由度アップ・軽量化に貢献
47mm
90.5mm
46mm
質量:280g
小型・軽量 負担減
3
Page4
微細な把持力制御 指先での「つかみ」をリアルに再現 2つ爪・3つ爪
●2つ爪タイプの把持力と運転電流(参考値) ● 破損しないように ● 落下しないように
30 そっと把持 2段階の把持
EH3
25 EH4
20
15
10
5
00 10 20 30 40 50 60 70 80 90 100
運転電流値 [%]
●把持力の推移<イメージ図>
時間 時間
ロングストローク 形状の異なるワークにその場で対応 2つ爪
● EH3-AZAKH ● ワークの形状がバラバラでもアタッチメント交換なしで
運転を継続
15mm
● EH4-AZAKH
25mm
● アタッチメント(ツメ)は別途ご用意ください。
4
把持力 [N]
把持力
把持力
Page5
「デリケートなつかみ」を活用した用途例
つかむ 変形しやすいワーク、傷の付きやすいワークを確実につかみます。 2つ爪・3つ爪
つかむものに合わせて、把持力、把持時間、速度を自在に設定できます。
傷の付きやすいガラス、変形しやすい樹脂やばねなども安全、確実につかみます。
直前まで素早く→ゆっくりつかむ
高速でワークに接近。当たる直前に減速して、低速で押し付けることができます。 WEBサイトの「動画ライブラリー」にて動画を公開中
① ワークまで高速、低把持力で ② ワークをつかむ直前で減速、 ③ ワークをつかんだあと、
接近 ゆっくりワークをつかむ 押し当て運転を開始。
設定した把持力で保持
そろえる ワークの向きや位置をそろえることができます。 2つ爪・3つ爪
ワークの大きさに合わせてつかむことで、向きや位置をそろえることができます。
ワーク大 ワーク小
測定する 外部センサが無くてもワークの大きさを確認できます。 2つ爪
フィンガの動作範囲でワークの大きさや有無の判定
フィンガの動作範囲をドライバからの出力信号(TLC出力、AREA出力)によって確認することで、
ワークの大きさや有無を判定できます。
① OK(公差内) ② NG(公差外) ③ NG(ワークの入れ忘れ)
※AREA出力: モーターが設定されたエリア内にいるとき、出力される信号です。
①② ワークの大きさ判定 ③ ワークの有無判定 TLC出力 :押し当て運転中、出力トルクが設定したトルク制限値に達すると
ワークをつかんだときのアタッチメントの ワークをつかめているか 出力される信号です。
位置を確認し、大きさごとに選別できます。 どうかを判定できます。
グリッパからの位置情報をモニタして大きさ測定
電動グリッパからの位置情報を上位PLCでモニタすることで、ワークの大きさを測定できます。
Modbus
ワークの大きさ測定 ※位置情報モニタ機能:位置情報を上位システムに伝える機能です。
● アタッチメント(ツメ)は別途ご用意ください。
5
Page6
グリッパの動作プログラムをドライバに登録し、上位システムの負荷を分散
● 対象:位置決め機能内蔵タイプドライバ、ネットワーク対応ドライバ(EtherCATを除く)
EHシリーズは、センサなどの外部入力信号や、自身の出力信号の状態を利用しながら、ドライバに簡易的なシーケンスプログラムを登録できます。
単純な用途なら、START / STOPの指令だけで動作させることも可能です。
当社WEBサイトの「使い方ナビ」コンテンツにて、EHシリーズのプログラム事例をご紹介しています。
モーターの状態をリアルタイムでモニタリング
EHシリーズはをはじめとした、 AZシリーズ搭載の電動アクチュエータでは、ネットワークを通じ、モーターの状態を常に監視できます。
モーター温度モニタ 積算負荷モニタ ODO/TRIPモニタ
ロボットがケースなどに覆われていてもリアルタイ 瞬間的な負荷率のモニタのほか、一度のモーター 車の計器のように累積回転数をモニタできます。
ムで温度をモニタ可能です。 運転パターンにおける負荷率を面積で把握し、値と 設定した閾値に達した際にインフォメーション信号
して検出することが可能です。経年劣化など長期の 出力が可能です。メンテナンスなどに利用できま
負荷の変化を把握することが可能です。 す。
45℃
40℃ 任意の値で
運転パターン インフォメーション
出力可能
50℃ MOVE ON
出力 OFF
45℃ ODOメーター
積算負荷 (積算走行距離)
インフォメーション
の設定値
55℃ TRIPメーター
(走行距離)
積算負荷のイメージ 経年
● モニタリング項目の詳細については、AZシリーズの取扱説明書をご覧ください。
◆ 専用サポートソフト MEXE02( 無償ダウンロード)
運転データの編集やパラメータの設定など、基本的な設定がパソコンから
簡単におこなえます。また、簡易的なシーケンスプログラムを作成できます。 電気設計者じゃなくても
かんたんに扱えると好評!
移動量や速度などを、任意の
単位(mm、deg)で表示・入
力できます
簡易シーケンス機能で
プログラムを簡略化できます
設定のコピー・バックアップ
ができます
分かりやすい・使いやすい ティーチングも 信号の入力状況を確認できる
直感的な操作性 パソコンから可能 波形モニタも搭載
6
Page7
EHシリーズ ラインアップ
電動グリッパ
EH3-AZAKH EH4-AZAKH EH4T-AZAKH EH4T-AZAK
ドライバ(DC電源入力)
位置決め機能内蔵タイプ RS-485通信付き パルス列入力タイプ ネットワーク対応 miniドライバ
パルス列入力タイプ 位置決めユニット(パルス発振 FAネットワークを通じて、上位 ボックス型のドライバよ
位置決めデータをドライバに設 RS-485通信でモーターの位置、 器)からモーターをコントロー 制御機器からドライバを直接制 りさらに小型・軽量の、
定(256点)。ネットワークコン 速度、トルク、アラーム、温度のモ ル。 御可能。 ネットワーク対応ドライ
バータ(別売)を使用することで、 ニタが可能。 バです。バッテリ電源に
FAネットワーク制御が可能。 も対応しています。
ケーブル
モーターから出ているモーターケーブル、エンコーダケーブルは、
ドライバに直接接続できません。
ケーブルが屈曲される場合には、可動接続ケーブルをお使いくだ
さい。
接続ケーブル 可動接続ケーブル
長さ 0.5~20m 長さ 0.5~20m
◆ 繊細な動作ほど、空気圧グリッパよりEHシリーズがおすすめです!
1 2つ爪・3つ爪 0.02 2つ爪
mm/s
%単位で 空気圧グリッパでのスピードコントロー
空気圧グリッパでのレギュレータ(減
ラ(速度制御弁)調整が不要。ステッピング
把持力調整 圧弁)調整が不要。デジタル設定で、簡 単位で
単・微細に把持力を調整できます。 速度調整 モーターによる制御なので速度調整が簡
単で、低速での把持が可能です。
0.02 2つ爪
mm ABZOセンサ 2つ爪・3つ爪
ステッピングモーターの位置決め精
単位で で 詳細な位置情報をモニタできます。
度の高さを活かしたグリッパです。さ
2つ爪タイプでは、位置情報をワーク
移動量調整 まざまな形状のワークへのアプロー 位置モニタ の大きさ判定にも活用できます。
チを実現します。
7
Page8
周辺機器
ロボット用取付フランジ
市販の産業用ロボットに取り付けできるフランジです。
治具の設計および作製の工数削減に貢献します。
また、ロボット側の取付フランジは、ISO9409-1(JIS B 8436)に準拠しています。 エンドエフェクタ側 ロボット側
各社ロボットメーカーのスカラロボットや垂直多関節ロボットへ取り付けできます。
"種類
品名 ロボット側対応 ISO規格 適用製品
P3F1 EH3-AZAKH
ISO 9409-1-31.5-4-
P3F2 M5 準拠 EH4-AZAKH
EH4T-AZAKH
P5F1 EH3-AZAKH
ISO 9409-1-50-4-
P5F2 M6 準拠 EH4-AZAKH
EH4T-AZAKH
"付属品
位置決めピン、六角穴付ボルト✽ 、取扱説明書
✽ 産業用ロボットとロボット取付用フランジを締結するためのボルトはお客様でご用意ください。 組み合わせイメージ
"外形図 (単位 mm)
品名 質量 kg 2D CAD
P3F1 D7919
P3F2 D7920
0.13
P5F1 D7921
P5F2 D7922
◇ P3F1 ◇ P3F2
ロボット側 EHシリーズ側 ロボット側 EHシリーズ側
45˚
5 5 15 25 45˚
ピン ϕ5×8 25 5 ピン ϕ5×8 5 15 25 25
R R
3 2
ϕ31.5 A ϕ31.5 A
A A
2 ピン ϕ6×8 2
4×ϕ5.5 25 4×ϕ5.5 25
裏より座ぐりϕ9.5 深さ5.4 裏より座ぐりϕ9.5 深さ5.4
A-A A-A
ピン ϕ3×8 M4×8 ピン ϕ3×8 M4×8
M3×8 M4×8
◇ P5F1 ◇ P5F2
ロボット側 EHシリーズ側 ロボット側 EHシリーズ側
45°
6 ピン ϕ6×8 5 15 25 25 45°
6 ピン ϕ6×8 5 15 25 25
R R
3 2
A A
A A
ピン ϕ6×8
2 2
ϕ50 ϕ50
4×ϕ6.6 25 4×ϕ6.6 25
裏より座ぐりϕ11 深さ6.5 裏より座ぐりϕ11 深さ6.5
A-A A-A
ピン ϕ3×8 M4×8 ピン ϕ3×8 M4×8
M3×8 M4×8
"組み合わせ可能な産業用ロボット例
◇ 株式会社安川電機 ◇ セイコーエプソン株式会社
対応製品例) 対応製品例)
・MOTOMAN-HCシリーズ ・Tシリーズ
・VT
8
90° 90˚
7
6
ϕ63
ϕ31.5 0
−0.039 (h8) ϕ63
ϕ20 0
−0.033 (h8)
3
3
25
25
8 8
8 8
90° 90˚
7
6
ϕ63
ϕ31.5 0
−0.039 (h8) ϕ63
ϕ20 0
−0.033 (h8)
ϕ10 0
3 −0.022 (h8)
0
3 ϕ10−0.022 (h8)
25
25
8 8
8 8
Page9
9
Page10
10
Page11
11
Page12
● 、 、 、ABZOセンサは、 日本その他の国における
オリエンタルモーター株式会社の登録商標または商標です。 お問い合わせ先
お客様ご相談センター
製品に関する技術的なお問い合わせ、購入についてのご相談はこちらまで。
TEL 0120-925-410 E-mail webts@orientalmotor.co.jp
オリエンタルモーター EHシリーズ 検索
12 www.o r i en t a lmo t o r. c o . j p / j a 2025 年 8 月制作 © 2025 Copyright ORIENTAL MOTOR CO., LTD. L-142-9