




AGV/AMRの動力に安心の実績。装置が移動する時代のバッテリ駆動・小型・軽量ブラシレスモーター
高出力・小型を追求したブラシレスモーター&ドライバ
よりコンパクトなバッテリ駆動機器の開発をサポートします。
・出力60、100、200、400W バッテリ対応DC電源入力製品
・STO認証取得
・Modbus(RTU)、CANopen通信対応
このカタログについて
| ドキュメント名 | 【バッテリ駆動可能/AGV・AMR搭載向け】ブラシレスモーター BLVシリーズ Rタイプ[B-67] |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 11.3Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ブラシレスモーター
BLVシリーズ
Rタイプ
モバイルオートメーション対応製品
STO認証取得
認証機関
TÜV SÜD Product Service GmbH
装置が移動する時代の
バッテリ駆動・小型・軽量ブラシレスモーター
60W・100W・200W・400W
DC電源入力
1
Page2
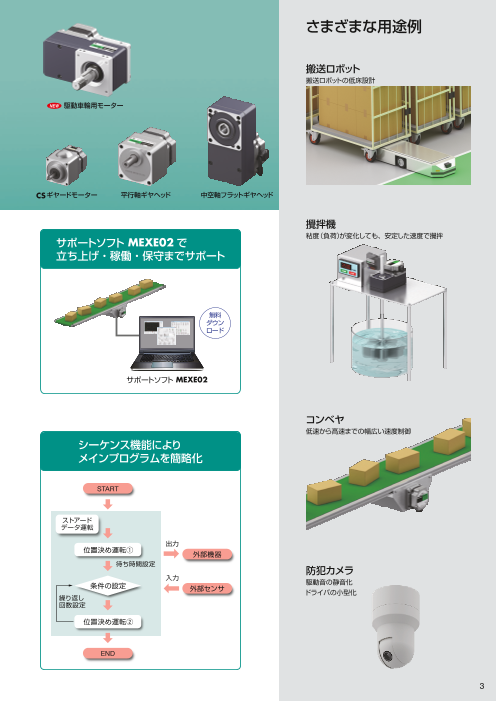
高出力・小型を追求したブラシレスモーター。 さまざまな用途例
よりコンパクトなバッテリ駆動機器の開発をサポートします。
搬送ロボット
• 出力:60 W、100 W、200 W、400 W 搬送ロボットの低床設計
• 電源入力:DC24∼48 V
• 電磁ブレーキ付も用意 駆動車輪用モーター
• 定価: 63,600 円✽∼
STO認証取得
✽モーター(丸シャフト 60 W)、ドライバ、接続ケーブル、電源ケーブルを合わせた価格 Modbus(RTU)
「モバイルオートメーショ ン対応製品」とは…
「モバイルオートメーション対応製品」は、バッテリ駆動・小型軽量を共通コンセプトとする製品群です。
自走装置や移動設備への搭載に最適で、今後一層求められる自由自在な自動化ライン、モバイル
オートメーションの実現に貢献します。 ドライバ DC24V 400Wドライバ CSギヤードモーター 平行軸ギヤヘッド 中空軸フラットギヤヘッド
攪拌機
粘度(負荷) が変化しても、安定した速度で攪拌
小型・軽量・ハイパワーで Modbus(RTU)、 サポートソフト MEXE02 で
装置のコンパクト設計に貢献 CANopen 通信に対応 立ち上げ・稼働・保守までサポート
• 小型・軽量ドライバ • 搬送ロボットと、
モーターと接続すると出力を認識、 コンベヤ等の機構部
ドライバ 1機種で全出力をカバーします。 と制御性統一
無料
ダウン
質量 0.12kg ロード
29mm
65 75mm
mm
・コンベヤ駆動モーター
( 60W CSギヤードモーター) サポートソフト MEXE02
• 薄型、高可搬質量の
搬送用ロボットの設計が可能 コンベヤ
モーター(100W 平行軸ギヤヘッド) 低速から高速までの幅広い速度制御
シーケンス機能により
メインプログラムを簡略化
START
フランジ出力ヘッド(別売)
ストアード
データ運転
出力
位置決め運転① 外部機器
待ち時間設定
防犯カメラ
入力
滑らかな駆動、現在位置の取得、 条件の設定 駆動音の静音化
外部センサ ドライバの小型化
位置決め運転が可能 繰り返し
回数設定
位置決め運転②
動作可能電圧範囲の拡大で
バッテリ電源がより使いやすく END
用途例:ベルトコンベヤ付きの自走搬送ロボツト
2 3
Page3
高出力・小型を追求したブラシレスモーター。 さまざまな用途例
よりコンパクトなバッテリ駆動機器の開発をサポートします。
搬送ロボット
• 出力:60 W、100 W、200 W、400 W 搬送ロボットの低床設計
• 電源入力:DC24∼48 V
• 電磁ブレーキ付も用意 駆動車輪用モーター
• 定価: 63,600 円✽∼
STO認証取得
✽モーター(丸シャフト 60 W)、ドライバ、接続ケーブル、電源ケーブルを合わせた価格 Modbus(RTU)
「モバイルオートメーショ ン対応製品」とは…
「モバイルオートメーション対応製品」は、バッテリ駆動・小型軽量を共通コンセプトとする製品群です。
自走装置や移動設備への搭載に最適で、今後一層求められる自由自在な自動化ライン、モバイル
オートメーションの実現に貢献します。 ドライバ DC24V 400Wドライバ CSギヤードモーター 平行軸ギヤヘッド 中空軸フラットギヤヘッド
攪拌機
粘度(負荷) が変化しても、安定した速度で攪拌
小型・軽量・ハイパワーで Modbus(RTU)、 サポートソフト MEXE02 で
装置のコンパクト設計に貢献 CANopen 通信に対応 立ち上げ・稼働・保守までサポート
• 小型・軽量ドライバ • 搬送ロボットと、
モーターと接続すると出力を認識、 コンベヤ等の機構部
ドライバ 1機種で全出力をカバーします。 と制御性統一
無料
ダウン
質量 0.12kg ロード
29mm
65 75mm
mm
・コンベヤ駆動モーター
( 60W CSギヤードモーター) サポートソフト MEXE02
• 薄型、高可搬質量の
搬送用ロボットの設計が可能 コンベヤ
モーター(100W 平行軸ギヤヘッド) 低速から高速までの幅広い速度制御
シーケンス機能により
メインプログラムを簡略化
START
フランジ出力ヘッド(別売)
ストアード
データ運転
出力
位置決め運転① 外部機器
待ち時間設定
防犯カメラ
入力
滑らかな駆動、現在位置の取得、 条件の設定 駆動音の静音化
外部センサ ドライバの小型化
位置決め運転が可能 繰り返し
回数設定
位置決め運転②
動作可能電圧範囲の拡大で
バッテリ電源がより使いやすく END
用途例:ベルトコンベヤ付きの自走搬送ロボツト
2 3
Page4
小型・軽量・ハイパワーで
装置のコンパクト設計に貢献 滑らかな駆動、現在位置の取得、位置決め運転が可能
小型・軽量 1∼4000 r/minの幅広い速度制御範囲
モーター、ドライバともに大幅な小型・軽量化を実現。 1 r/min∼の低速域も安定した運転で、より滑らかな起動・停止を実現
ドライバは従来品に比べて約80% コンパクトに。装置内の限られたスペースに収まるサイズです。 します。 Merit
・人の動きに追従するような起動・停止を繰り返す動作でも
●モーター✽ ●ドライバ 速度比 滑らかな走行をおこなえます。
154mm 従来品
BLVシリーズ 80~4000 r/min 1:50
従来品
BLVシリーズ
400 W 体積・質量
BLVシリーズ
160mm Rタイプ 1~4000 r/min 1:4000
質量 5.4 80%減
kg
1 80 4000
8 29mm
mm
146mm サイズダウン 100mm 75mm
45mm 65mm
BLVシリーズ
Rタイプ 0.9kg軽量化 質量 0.6kg 質量 0.12kg
400 W 従来品 BLVシリーズ
BLVシリーズ Rタイプ✽
質量 4.5kg
✽DC24V 400W タイプの場合、 設定通りの速度で動作する高い速度安定性 現在位置の取得、位置決め運転が可能
160(W)mm×110(D)mm×35(H)mm、
✽平行軸ギヤヘッド 400W・減速比 30 の場合 質量は 0.46kg です。
速度変動率(対負荷✽1)が±0.01%と小さく、負荷の大きさが変わって モーターのフィードバック情報が充実したため、現位置の取得が
も設定した速度で運転できます。 可能です。
また、分解能向上により、狙った位置に停止することができます。
ハイパワー 速度変動率(対負荷) ±0.5%✽2
従来品 分解能の向上で
従来品に比べて大きな慣性負荷の駆動が可能なため、重量物の搬送が可能になりました。 BLVシリーズ より正確な、位置決め運転が可能
コンパクトでハイパワーな装置設計に貢献します。
速度変動率(対負荷) ±0.01%
【搬送用ロボットの装置設計例】 BLVシリーズ 分解能
●条件 Rタイプ 停止ポイント(目標位置)
BLVシリーズ 種類 中空軸フラットギヤヘッド
Rタイプ 出力 400 実速度 定格回転速度
W ●位置決め運転時の停止精度は、モーター軸上で ±0.72˚、
モーター 減速比 30 ✽1 定常的に負荷が加わったときの速度の変化率です ギヤヘッド出力軸上では 1∼2˚ 程度です。
車輪直径 150 mm 速度変動率 実回転速度−指令回転速度
= ×100(%)
駆動条件 駆動輪数 2 台 定格回転速度
加速時間 1 秒 ✽2 デジタル設定時は、±0.2% です
●結果
最大搬送質量
(搬送用ロボット本体質量+積載質量) 500 kg
最高移動速度 0.7 m/sec
✽車輪の摩擦係数は0.1で計算しています。
4 5
Page5
小型・軽量・ハイパワーで
装置のコンパクト設計に貢献 滑らかな駆動、現在位置の取得、位置決め運転が可能
小型・軽量 1∼4000 r/minの幅広い速度制御範囲
モーター、ドライバともに大幅な小型・軽量化を実現。 1 r/min∼の低速域も安定した運転で、より滑らかな起動・停止を実現
ドライバは従来品に比べて約80% コンパクトに。装置内の限られたスペースに収まるサイズです。 します。 Merit
・人の動きに追従するような起動・停止を繰り返す動作でも
●モーター✽ ●ドライバ 速度比 滑らかな走行をおこなえます。
154mm 従来品
BLVシリーズ 80~4000 r/min 1:50
従来品
BLVシリーズ
400 W 体積・質量
BLVシリーズ
160mm Rタイプ 1~4000 r/min 1:4000
質量 5.4 80%減
kg
1 80 4000
8 29mm
mm
146mm サイズダウン 100mm 75mm
45mm 65mm
BLVシリーズ
Rタイプ 0.9kg軽量化 質量 0.6kg 質量 0.12kg
400 W 従来品 BLVシリーズ
BLVシリーズ Rタイプ✽
質量 4.5kg
✽DC24V 400W タイプの場合、 設定通りの速度で動作する高い速度安定性 現在位置の取得、位置決め運転が可能
160(W)mm×110(D)mm×35(H)mm、
✽平行軸ギヤヘッド 400W・減速比 30 の場合 質量は 0.46kg です。
速度変動率(対負荷✽1)が±0.01%と小さく、負荷の大きさが変わって モーターのフィードバック情報が充実したため、現位置の取得が
も設定した速度で運転できます。 可能です。
また、分解能向上により、狙った位置に停止することができます。
ハイパワー 速度変動率(対負荷) ±0.5%✽2
従来品 分解能の向上で
従来品に比べて大きな慣性負荷の駆動が可能なため、重量物の搬送が可能になりました。 BLVシリーズ より正確な、位置決め運転が可能
コンパクトでハイパワーな装置設計に貢献します。
速度変動率(対負荷) ±0.01%
【搬送用ロボットの装置設計例】 BLVシリーズ 分解能
●条件 Rタイプ 停止ポイント(目標位置)
BLVシリーズ 種類 中空軸フラットギヤヘッド
Rタイプ 出力 400 実速度 定格回転速度
W ●位置決め運転時の停止精度は、モーター軸上で ±0.72˚、
モーター 減速比 30 ✽1 定常的に負荷が加わったときの速度の変化率です ギヤヘッド出力軸上では 1∼2˚ 程度です。
車輪直径 150 mm 速度変動率 実回転速度−指令回転速度
= ×100(%)
駆動条件 駆動輪数 2 台 定格回転速度
加速時間 1 秒 ✽2 デジタル設定時は、±0.2% です
●結果
最大搬送質量
(搬送用ロボット本体質量+積載質量) 500 kg
最高移動速度 0.7 m/sec
✽車輪の摩擦係数は0.1で計算しています。
4 5
Page6
動作可能電圧範囲の拡大で
バッテリ電源がより使いやすく STO認証取得について
STO✽認証を取得したことにより、安全認証への対応が容易になりました。周辺機器を削減し、コスト削減や、省スペース化を
動作可能電圧範囲が拡大 実現します。
✽STO(Safe Torque Off)機能を搭載
動作可能電圧範囲 Merit
電圧 拡大 ・DC24∼48 V のバッテリに対応できます。
・バッテリ電圧が低下しても停止しません。
回転速度とトルクを制限しながら運転を続けます。
15∼55 V
10∼38 V
認証機関
TÜV SÜD Product Service GmbH
従来品 BLVシリーズ
BLVシリーズ Rタイプ
SIL 2、PL dの機能安全の認証を取得
消費電力 10%削減 適合規格 安全度レベル
IEC 61800-5-2, EN 61800-5-2
消費電力
t
約10%減 Meri IEC 61508-1, EN 61508-1 SIL 2
・搬送用ロボットの場合、走行できる距離や時間が延びます。
250 77 50 バッテリの充電回数を減らすことができます。 IEC 61508-2, EN 61508-2
損失
200 ISO 13849-1, EN ISO 13849-1 PL d(Category 3)
・サポートソフト MEXE02や、通信で消費電力のモニタができます。
150 充電の目安としてご使用いただけます。
100 200 200 出力
50 STO搭載ドライバで、安全機能部を簡易化
STO搭載ドライバなら、予期しない起動を防止するためのコンタクタが不要になります。装置のコスト削減、省スペース化に貢献します。
従来品 BLVシリーズ
BLVシリーズ Rタイプ
200 W 200 W ●STO非搭載のドライバを使用する場合 ドライバへの
電源供給を遮断
コンタクタ コンタクタ
バッテリー 安全 セーフティ
スイッチ ユニット
コンタクタ コンタクタ
安全機能部
ドライバ モーター
●BLVシリーズ Rタイプ(STO搭載ドライバ)を使用する場合 モーターへの
電源供給を遮断
コンタクタ不要で
バッテリー 安全 セーフティ コスト削減/省スペース
スイッチ ユニット
安全機能部
ドライバ モーター
66 7
消費電力 [W]
Page7
動作可能電圧範囲の拡大で
バッテリ電源がより使いやすく STO認証取得について
STO✽認証を取得したことにより、安全認証への対応が容易になりました。周辺機器を削減し、コスト削減や、省スペース化を
動作可能電圧範囲が拡大 実現します。
✽STO(Safe Torque Off)機能を搭載
動作可能電圧範囲 Merit
電圧 拡大 ・DC24∼48 V のバッテリに対応できます。
・バッテリ電圧が低下しても停止しません。
回転速度とトルクを制限しながら運転を続けます。
15∼55 V
10∼38 V
認証機関
TÜV SÜD Product Service GmbH
従来品 BLVシリーズ
BLVシリーズ Rタイプ
SIL 2、PL dの機能安全の認証を取得
消費電力 10%削減 適合規格 安全度レベル
IEC 61800-5-2, EN 61800-5-2
消費電力
t
約10%減 Meri IEC 61508-1, EN 61508-1 SIL 2
・搬送用ロボットの場合、走行できる距離や時間が延びます。
250 77 50 バッテリの充電回数を減らすことができます。 IEC 61508-2, EN 61508-2
損失
200 ISO 13849-1, EN ISO 13849-1 PL d(Category 3)
・サポートソフト MEXE02や、通信で消費電力のモニタができます。
150 充電の目安としてご使用いただけます。
100 200 200 出力
50 STO搭載ドライバで、安全機能部を簡易化
STO搭載ドライバなら、予期しない起動を防止するためのコンタクタが不要になります。装置のコスト削減、省スペース化に貢献します。
従来品 BLVシリーズ
BLVシリーズ Rタイプ
200 W 200 W ●STO非搭載のドライバを使用する場合 ドライバへの
電源供給を遮断
コンタクタ コンタクタ
バッテリー 安全 セーフティ
スイッチ ユニット
コンタクタ コンタクタ
安全機能部
ドライバ モーター
●BLVシリーズ Rタイプ(STO搭載ドライバ)を使用する場合 モーターへの
電源供給を遮断
コンタクタ不要で
バッテリー 安全 セーフティ コスト削減/省スペース
スイッチ ユニット
安全機能部
ドライバ モーター
6 77
消費電力 [W]
Page8
さまざまなおすすめ機能 Modbus(RTU)、CANopen通信に対応
BLVシリーズ Rタイプは、Modbus(RTU)、CANopen通信の2つのインターフェイスに対応しています。
電気的なブレーキで停止時の保持が可能 上位制御機器 タッチパネル パソコン
モーターが励磁状態での停止時には、機械ブレーキがなくても電気的な保持ブレーキとして使用できます。
入力信号「S-ON」をONにするとモーターが励磁し、保持力を発生します。(サーボオン)
さらに入力信号「PLOOP-MODE」をONにすると、停止位置からずれないように位置を保持できます。 Modbus(RTU)
ご注意
ドライバへの電力供給が OFF になると、保持力はなくなります。
停電時の落下防止などにはお使いいただけません。
出力トルクを自動的に制限するATL機能
Modbus(RTU)でできる主な機能
ATL機能は、過負荷アラームを検出するレベルのトルクが継続して出力され
ると、トルクを制限し、過負荷アラームでモーターが止まらないようにする トルク ●自由に運転プロファイルを作成可能-ダイレクトデータ運転
機能です。 最大出力トルク Modbus(RTU)通信で、データの書き換えと運転の開始を同時にできる運転方法です。
何らかの要因✽で予期せず過負荷になった場合でも、モーターの駆動を継続 ATL機能
します。 ●運転データの種類
✽例) 過負荷検出トルク 運転方式 運転方式を設定します。
・ 障害物に押しあたってしまう 位置 目標位置を設定します。
・ 急な加速指令が入る
・ 可搬質量を超える荷物が積載される 速度 運転速度を設定します。
加速レート 加速時間を設定します。
●過負荷時に、アラームを出力して停止したい場合には、ATL機能を無効にしてください。 時間
減速レート 減速時間を設定します。
トルク制限値 トルク制限値を設定します。
●各軸に異なるデータをまとめて送受信可能- IDシェアモード
シーケンス機能によりメインプログラムを簡略化
Modbus(RTU)通信で、軸間の同期性を向上する機能です。
ストアードデータ運転時に使用できる、連結運転や運転間のタイマ設定、条件分岐、ループ回数などの豊富なシーケンス機能を 複数軸にまとめてデータの送受信ができるため、軸間の通信遅れが改善します。
搭載しています。上位システムのシーケンスプログラムを簡略化できます。 また、各軸に異なる指令を同時に送信することも可能です。
当社独自の送信方法です。
●ストアードデータ設定数(最大 256 点)
●ダイレクト入出力点数(入力 4 点、出力 2 点) マスタ側 指令 スレーブ側
●リモート入出力点数(入力 32 点、出力 32 点) Modbus(RTU) 速度:1000 r/min
1軸
START
指令
上位制御機器 速度:500 r/min
ストアード 2軸
データ運転 まとめてデータを送受信するため、
出力 軸間の通信遅れを改善できます。
位置決め運転① 指令
外部機器 速度:10 r/min
待ち時間設定 3軸
入力
サポートソフト MEXE02 条件の設定 外部センサ
繰り返し
回数設定
位置決め運転②
END
88 9
Page9
さまざまなおすすめ機能 Modbus(RTU)、CANopen通信に対応
BLVシリーズ Rタイプは、Modbus(RTU)、CANopen通信の2つのインターフェイスに対応しています。
電気的なブレーキで停止時の保持が可能 上位制御機器 タッチパネル パソコン
モーターが励磁状態での停止時には、機械ブレーキがなくても電気的な保持ブレーキとして使用できます。
入力信号「S-ON」をONにするとモーターが励磁し、保持力を発生します。(サーボオン)
さらに入力信号「PLOOP-MODE」をONにすると、停止位置からずれないように位置を保持できます。 Modbus(RTU)
ご注意
ドライバへの電力供給が OFF になると、保持力はなくなります。
停電時の落下防止などにはお使いいただけません。
出力トルクを自動的に制限するATL機能
Modbus(RTU)でできる主な機能
ATL機能は、過負荷アラームを検出するレベルのトルクが継続して出力され
ると、トルクを制限し、過負荷アラームでモーターが止まらないようにする トルク ●自由に運転プロファイルを作成可能-ダイレクトデータ運転
機能です。 最大出力トルク Modbus(RTU)通信で、データの書き換えと運転の開始を同時にできる運転方法です。
何らかの要因✽で予期せず過負荷になった場合でも、モーターの駆動を継続 ATL機能
します。 ●運転データの種類
✽例) 過負荷検出トルク 運転方式 運転方式を設定します。
・ 障害物に押しあたってしまう 位置 目標位置を設定します。
・ 急な加速指令が入る
・ 可搬質量を超える荷物が積載される 速度 運転速度を設定します。
加速レート 加速時間を設定します。
●過負荷時に、アラームを出力して停止したい場合には、ATL機能を無効にしてください。 時間
減速レート 減速時間を設定します。
トルク制限値 トルク制限値を設定します。
●各軸に異なるデータをまとめて送受信可能- IDシェアモード
シーケンス機能によりメインプログラムを簡略化
Modbus(RTU)通信で、軸間の同期性を向上する機能です。
ストアードデータ運転時に使用できる、連結運転や運転間のタイマ設定、条件分岐、ループ回数などの豊富なシーケンス機能を 複数軸にまとめてデータの送受信ができるため、軸間の通信遅れが改善します。
搭載しています。上位システムのシーケンスプログラムを簡略化できます。 また、各軸に異なる指令を同時に送信することも可能です。
当社独自の送信方法です。
●ストアードデータ設定数(最大 256 点)
●ダイレクト入出力点数(入力 4 点、出力 2 点) マスタ側 指令 スレーブ側
●リモート入出力点数(入力 32 点、出力 32 点) Modbus(RTU) 速度:1000 r/min
1軸
START
指令
上位制御機器 速度:500 r/min
ストアード 2軸
データ運転 まとめてデータを送受信するため、
出力 軸間の通信遅れを改善できます。
位置決め運転① 指令
外部機器 速度:10 r/min
待ち時間設定 3軸
入力
サポートソフト MEXE02 条件の設定 外部センサ
繰り返し
回数設定
位置決め運転②
END
8 99
Page10
サポートソフト MEXE02 で 保守 診断・メンテナンスに役立つ機能
立ち上げ・稼働・保守までサポート ●トレースモニタ
Merit
サポートソフト MEXE02 を使用すると、データの設定や実際の駆動、また各種モニタに サポートソフト モーターの運転状態を連続して24 時間以上計測することができます。
よる確認がパソコン上で簡単におこなえます。サポートソフトは当社 WEB サイトから無料で MEXE02 データは CSV 形式で保存できます。 長時間のデータが残っているため、トラブルの原因究明が
ダウンロードできます。 しやすくなります。
➜ https://www.orientalmotor.co.jp/ja/download/software/mexe02-function
連続して24時間以上の
USB 計測が可能
立ち上げ スムーズな装置の立ち上げに役立つ機能
●簡易設定 ●通信フレームモニタ、通信ステータスモニタ
「簡易通信設定」で簡単に各通信の設定ができます。 各通信のフレームやステータスをモニタできます。
上位プログラムの立ち上げ、デバッグに活用いただけます。 さまざまなモニタ機能
サポートソフト MEXE02 は他にもさまざまな情報をモニタできます。詳細は当社 WEB サイトをご確認ください。
➜ https://www.orientalmotor.co.jp/ja/download/software/mexe02-function
省スペース設計に貢献するギヤヘッド
中空軸フラットギヤヘッドで、さらに高トルク、省スペース
●飽和しない許容トルク ●省スペース、省コスト
高減速比でも許容トルクが飽和しません。 連結部品を使わずに、駆動軸と直接連結できるため、装置の省スペース化を
モーターのトルクを最大限に活用できます。 実現できます。また、カップリングやベルト・プーリなどを削減できるため、
部品コストや組立工数の削減に貢献します。
80
稼働 調整に役立つ機能 中空軸フラットギヤヘッド [平行軸ギヤヘッド] [中空軸フラットギヤヘッド]
60 カップリング
●波形モニタ ●FFTモニタ ス
40
平行軸ギヤヘッド ペ連
部品削減 ー結
オシロスコープのようにモーターの運転状態(指令速度、 FFT解析を用いた周波数分析により、機械共振を可視化して ス
20
トルク、入出力信号など)を確認できます。 います。「共振抑制パラメータ」を調整することで、音、振動 ギヤヘッド部
波形の測定結果は、画像や CSV形式で保存できます。 を低減できます。 0
100 200
減速比 モーター部 省スペース
*取付角寸法 90 mm の場合
例)車輪駆動部の用途
互い違いでコンパクトに配置可能。
*100 W以外対応可能
装置の小型化・軽量化を実現 CS ギヤードモーター(60 W タイプ)
CS ギヤードモーターは、「耐荷重アップ /1ランクアップのトルク / 同心軸」といった特徴を持っています。
●ゲインチューニング ●装置全体の省スペース・軽量化に貢献 ●同心軸のギヤ構造
指令に対するモーターの追従性を調整できます。 大きな歯車を中心軸から逃がすように配置することで、同心軸のギヤヘッドを
60W 0.87kg 実現しました。
89.5mm
60mm
60mm
1100 11
許容トルク [N・m]
Page11
サポートソフト MEXE02 で 保守 診断・メンテナンスに役立つ機能
立ち上げ・稼働・保守までサポート ●トレースモニタ
Merit
サポートソフト MEXE02 を使用すると、データの設定や実際の駆動、また各種モニタに サポートソフト モーターの運転状態を連続して24 時間以上計測することができます。
よる確認がパソコン上で簡単におこなえます。サポートソフトは当社 WEB サイトから無料で MEXE02 データは CSV 形式で保存できます。 長時間のデータが残っているため、トラブルの原因究明が
ダウンロードできます。 しやすくなります。
➜ https://www.orientalmotor.co.jp/ja/download/software/mexe02-function
連続して24時間以上の
USB 計測が可能
立ち上げ スムーズな装置の立ち上げに役立つ機能
●簡易設定 ●通信フレームモニタ、通信ステータスモニタ
「簡易通信設定」で簡単に各通信の設定ができます。 各通信のフレームやステータスをモニタできます。
上位プログラムの立ち上げ、デバッグに活用いただけます。 さまざまなモニタ機能
サポートソフト MEXE02 は他にもさまざまな情報をモニタできます。詳細は当社 WEB サイトをご確認ください。
➜ https://www.orientalmotor.co.jp/ja/download/software/mexe02-function
省スペース設計に貢献するギヤヘッド
中空軸フラットギヤヘッドで、さらに高トルク、省スペース
●飽和しない許容トルク ●省スペース、省コスト
高減速比でも許容トルクが飽和しません。 連結部品を使わずに、駆動軸と直接連結できるため、装置の省スペース化を
モーターのトルクを最大限に活用できます。 実現できます。また、カップリングやベルト・プーリなどを削減できるため、
部品コストや組立工数の削減に貢献します。
80
稼働 調整に役立つ機能 中空軸フラットギヤヘッド [平行軸ギヤヘッド] [中空軸フラットギヤヘッド]
60 カップリング
●波形モニタ ●FFTモニタ ス
40
平行軸ギヤヘッド ペ連
部品削減 ー結
オシロスコープのようにモーターの運転状態(指令速度、 FFT解析を用いた周波数分析により、機械共振を可視化して ス
20
トルク、入出力信号など)を確認できます。 います。「共振抑制パラメータ」を調整することで、音、振動 ギヤヘッド部
波形の測定結果は、画像や CSV形式で保存できます。 を低減できます。 0
100 200
減速比 モーター部 省スペース
*取付角寸法 90 mm の場合
例)車輪駆動部の用途
互い違いでコンパクトに配置可能。
*100 W以外対応可能
装置の小型化・軽量化を実現 CS ギヤードモーター(60 W タイプ)
CS ギヤードモーターは、「耐荷重アップ /1ランクアップのトルク / 同心軸」といった特徴を持っています。
●ゲインチューニング ●装置全体の省スペース・軽量化に貢献 ●同心軸のギヤ構造
指令に対するモーターの追従性を調整できます。 大きな歯車を中心軸から逃がすように配置することで、同心軸のギヤヘッドを
60W 0.87kg 実現しました。
89.5mm
60mm
60mm
10 1111
許容トルク [N・m]
Page12
車輪機構 ラインアップ
駆動車輪用モーター ●モーター
●AGV/AMRの車輪機構設計・立ち上げ時間短縮に貢献 取付角 許容ラジアル荷重 許容アキシアル荷重
転速度、 (定格回転速度、 定格電圧
出力軸タイプ 寸法 定格出力 (定格回
減速比 電磁
モーター、ギヤヘッド、車輪選定の手間を削減し、装置組み立て時の組付け時間を短縮します。 [W] 最大減速比の場合) 最大減速比の場合) [V] ブレーキ
[mm]
耐荷重は最大 130kg/ 輪✽1、株式会社イノアック車輪製の車輪✽2 と組み合わせ可能です。 [N] [N]
平行軸ギヤヘッド 80 60 550✽1 100 無し
5∼200
100
90 650✽1 150
200 15∼50
有り/無し
200
110 1700✽1
400 400
DWR-150D DWU-150D 5∼200
(ゴム車輪) (ウレタン車輪) 中空軸フラット 80 60 1200✽2 無し
駆動車輪用モーター ギヤヘッド
車輪取付イメージ 100
90 1500✽2 500
✽1 耐荷重は 1 輪当たりに加えられる値です。耐荷重を超えないように必ず補助輪を設置してください。 200 15∼50
✽2 車輪については、株式会社イノアック車輪製の車輪をオリムベクスタ株式会社から販売しています。車輪の組み付けは、お客様にお願いしております。 有り/無し
200 10∼100
104 2040✽2 800 DC24∼48
400 5∼100
●AGV/AMRの低床構造、スリム化を実現
CSギヤードモーター✽3
●中空軸フラットギヤヘッドを採用・低床設計が可能 ●互い違いでコンパクトに配置可能
60 60 5∼20 260✽1 70 無し
ϕ150mm
123mm✽
丸シャフト 60 60 100✽1 15 無し
100
−
低床 90 200 170✽1 25 有り/無し
✽ 400W の場合は 130mm 400
✽1 出力軸先端から 20mm での値です。
✽2 取付面から 10mm での値です。
✽3 モーターとギヤヘッドが一体型のギヤードモーターです。
車幅をコンパクトに
●駆動車輪用モーター
取付角
寸法 定格出力 定格電圧
出力軸タイプ 減速比 電磁 耐荷重✽2
組み合わせ可能な車輪✽1
メカナムホイール [W] [V] ブレーキ
[mm] [kg/輪]
●全方向へスムーズに移動し、自由な方向転換が可能 駆動車輪用モーター
モーターとすぐに組み付けられる取付フランジが付いた状態のナブテスコ株式会社製メカナムホイールを、オリムベクスタ株式会社から 駆動用ゴム車輪タイプ
販売しています。 100 DWR-150D
90 100
駆動用ウレタン車輪タイプ
DWU-150D
200 20、50 DC24∼48 有り/無し
●取付イメージ
丸シャフトタイプ AGV 駆動ユニット RVW シリーズ 104 400 130
出力:200W、400W
✽1 車輪については、株式会社イノアック車輪製の車輪をオリムベクスタ株式会社から販売しています。車輪の組み付けは、お客様にお願いしております。
✽2 耐荷重は1輪当たりに加えられる値です。耐荷重を超えないように必ず補助輪を設置してください。
1122 13
Page13
車輪機構 ラインアップ
駆動車輪用モーター ●モーター
●AGV/AMRの車輪機構設計・立ち上げ時間短縮に貢献 取付角 許容ラジアル荷重 許容アキシアル荷重
転速度、 (定格回転速度、 定格電圧
出力軸タイプ 寸法 定格出力 (定格回
減速比 電磁
モーター、ギヤヘッド、車輪選定の手間を削減し、装置組み立て時の組付け時間を短縮します。 [W] 最大減速比の場合) 最大減速比の場合) [V] ブレーキ
[mm]
耐荷重は最大 130kg/ 輪✽1、株式会社イノアック車輪製の車輪✽2 と組み合わせ可能です。 [N] [N]
平行軸ギヤヘッド 80 60 550✽1 100 無し
5∼200
100
90 650✽1 150
200 15∼50
有り/無し
200
110 1700✽1
400 400
DWR-150D DWU-150D 5∼200
(ゴム車輪) (ウレタン車輪) 中空軸フラット 80 60 1200✽2 無し
駆動車輪用モーター ギヤヘッド
車輪取付イメージ 100
90 1500✽2 500
✽1 耐荷重は 1 輪当たりに加えられる値です。耐荷重を超えないように必ず補助輪を設置してください。 200 15∼50
✽2 車輪については、株式会社イノアック車輪製の車輪をオリムベクスタ株式会社から販売しています。車輪の組み付けは、お客様にお願いしております。 有り/無し
200 10∼100
104 2040✽2 800 DC24∼48
400 5∼100
●AGV/AMRの低床構造、スリム化を実現
CSギヤードモーター✽3
●中空軸フラットギヤヘッドを採用・低床設計が可能 ●互い違いでコンパクトに配置可能
60 60 5∼20 260✽1 70 無し
ϕ150mm
123mm✽
丸シャフト 60 60 100✽1 15 無し
100
−
低床 90 200 170✽1 25 有り/無し
✽ 400W の場合は 130mm 400
✽1 出力軸先端から 20mm での値です。
✽2 取付面から 10mm での値です。
✽3 モーターとギヤヘッドが一体型のギヤードモーターです。
車幅をコンパクトに
●駆動車輪用モーター
取付角
寸法 定格出力 定格電圧
出力軸タイプ 減速比 電磁 耐荷重✽2
組み合わせ可能な車輪✽1
メカナムホイール [W] [V] ブレーキ
[mm] [kg/輪]
●全方向へスムーズに移動し、自由な方向転換が可能 駆動車輪用モーター
モーターとすぐに組み付けられる取付フランジが付いた状態のナブテスコ株式会社製メカナムホイールを、オリムベクスタ株式会社から 駆動用ゴム車輪タイプ
販売しています。 100 DWR-150D
90 100
駆動用ウレタン車輪タイプ
DWU-150D
200 20、50 DC24∼48 有り/無し
●取付イメージ
丸シャフトタイプ AGV 駆動ユニット RVW シリーズ 104 400 130
出力:200W、400W
✽1 車輪については、株式会社イノアック車輪製の車輪をオリムベクスタ株式会社から販売しています。車輪の組み付けは、お客様にお願いしております。
✽2 耐荷重は1輪当たりに加えられる値です。耐荷重を超えないように必ず補助輪を設置してください。
12 1133
Page14
●ドライバ ●接続ケーブル/可動接続ケーブル
出力 電圧 モーター出力 接続ケーブル/
可動接続ケーブル 電源ケーブル
[W] [V] [W] [m]
[m]
0.3✽∼3
60∼200 DC24∼48 60
0.6
1∼3
DC24 100、200、400
400
✽ケーブル長さ 0.3 mは、接続ケーブルのみです。
DC48
1144
Page15
"システム構成
● 100 W、200 W、400 W
モーター、ギヤヘッド、ドライバ、接続ケーブル、電源ケーブルは別手配です。
必ずご購入ください
必要に応じてご購入ください お客様にて、
サポートソフト 必ずご用意ください。
お客様にて、
モーター MEXE02 USBケーブル 必ずご用意ください。
ギヤヘッド USBポートへ
上位制御機器
通信用電源✽
●サポートソフトMEXE02は当社WEBサイト ドライバ
からダウンロードいただけます。
✽DC24 V 400 Wタイプの
場合、通信用電源は
不要です。
●モーターケーブルは直接
ドライバに接続できます。
お客様にて、
必ずご用意ください。
DC電源
(主電源)
最大延長距離:3.5 m(モーターケーブル0.5 m含む)
モーターにはケーブル引出し方向を2種類ご用意しています。 接続ケーブル/可動接続ケーブル 電源ケーブル
出力軸側引出し 反出力軸側引出し
モーター用周辺機器 フランジ出力ヘッド
モーター・ギヤヘッド フレキシブル
取付金具 カップリング ギヤヘッドに取り付けて許容荷重を大幅アップする
製品です。平行軸ギヤヘッドGFV5G□、5GR□に
お使いいただけます。(□ : 減速比)
●システム構成価格例
モーター ギヤヘッド ドライバ ケーブル 周辺機器
接続ケーブル(1 m) 電源ケーブル フランジ出力ヘッド
BLMR5100K-GFV-F GFV5G10 BLVD-KRD CCM010B1AAF LC03D06A AGD580B
25,500円 14,600円 37,800円 4,600円 1,600円 52,800円
● 上記システム構成は一例です。他の組み合わせもございます。
● ケーブル、その他周辺機器の詳細はWEBサイトをご覧ください。
15
Page16
ブラシレスモーター
BLVシリーズ
Rタイプ
モバイルオートメーション対応製品
STO認証取得
認証機関
TÜV SÜD Product Service GmbH
装置が移動する時代の
バッテリ駆動・小型・軽量ブラシレスモーター
●このカタログに掲載している製品を製造している事業所は、品質マネジメントシステム ISO9001
安全に関するご注意 および環境マネジメントシステム ISO14001認証を取得しています。
●このカタログに掲載している製品の性能および仕様は、改良のため予告なく変更することがあります
ので、ご了承ください。
●ご使用の際は、取扱説明書を良くお読みのうえ正しくお使いください。 ●このカタログに掲載している全製品の価格には消費税等は含まれておりません。
●このカタログに掲載している製品は産業用および機器組み込み用です。 ●製品について詳しくお知りになりたい方は、お近くの支店、営業所におたずねになるか、下記の“お客様
その他の用途には使用しないでください。 ご相談センター”にお問い合わせください。
●このカタログに記載している会社名および商品の名称は、それぞれの会社が所有する商標または登録商
標です。
● は、日本その他の国におけるオリエンタルモーター株式会社の登録商標または商
標です。
お客様ご相談センター
東京支社 TEL( 03) 6744-1311 名古屋支社 TEL( 052) 223-2611
北上営業所 TEL( 0197) 64-7902 豊田営業所 TEL( 0566) 62-6001 製品に関する技術的なお問い合わせ、購入についてのご相談はこちらまで。
仙台支店 TEL( 022) 227-2501 静岡営業所 TEL( 054) 255-8625 TEL 0120-925-410
新潟営業所 TEL( 025) 241-3601 金沢営業所 TEL( 076) 239-4111
水戸営業所 TEL( 029) 233-0671 京都支店 TEL( 075) 353-7870 E-mail webts@orientalmotor.co.jp
宇都宮営業所 TEL( 028) 610-7010 滋賀営業所 TEL( 077) 566-2311
諏訪営業所 TEL( 0266) 52-2007 大阪支社 TEL( 06) 6337-0121
熊谷営業所 TEL( 048) 526-3851 兵庫営業所 TEL( 078) 915-1313 https://www.orientalmotor.co.jp/ja
南関東支店 TEL( 046) 236-1080 広島営業所 TEL( 082) 569-7900 WEBサイトでも、お問い合わせやご注文を受け付けています。
甲府営業所 TEL( 055) 225-4566 九州支店 TEL( 092) 473-1575
熊本営業所 TEL( 096) 352-7151
お問い合わせ先
第1営業部 TEL( 050)5445-9709 第2営業部 TEL( 050)5445-9710
(東日本) (中部/西日本)
60W・100W・200W・400W
DC電源入力
2025 年 1 月 制作 このカタログの記載内容は、2025 年 1 月現在のものです。 © 2023-2025 Copyright ORIENTAL MOTOR CO., LTD. B-67-3