




まるで指先のようなデリケートな掴みを実現】電動グリッパEHシリーズ
「つかむ」「そろえる」「測定する」を1台で。
「つかむ」
電流値を1%単位で調整することによる把持力の微調整と
低速でワークにアプローチすることでデリケートな「つかみ」を実現します。
「そろえる」
最小移動量0.02mmでワークに合わせて、
向きや大きさを「そろえる」ことが可能です。
「測定する」
外部センサが無くても、ワークの大きさや有無を確認できます。
◆詳細はカタログをダウンロードしご覧いただくか、お気軽にお問い合わせ下さい。
関連メディア
このカタログについて
| ドキュメント名 | 電動グリッパ EHシリーズ αSTEPAZシリーズ搭載 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 5Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
電動グリッパ
EHシリーズ
AZシリーズ搭載
NEW 3つ爪タイプ
2つ爪タイプ
デリケ ート な「 つ か み 」を 実 現 。
Page2
人の指先のような
デリケートな「つかみ」を実現。
詳細はこちら
電動グリッパ
EHシリーズ
AZシリーズ搭載
駆動モーターには、バッテリレスアブソリュート
センサ内蔵の AZシリーズを採用しています。
人の指先のようなデリケートな「つかみ」を実現し、
EH4-AZAKH
自動化・省人化をお手伝いします。 EH4T-AZAKH
ロボットにやさしい、小型・軽量グリッパ 42.5mm
80.5mm
● 大きさ 80.5mm×36mm×42.5mm
● 質量 200g
● 36mm
EH3-AZAKHの場合
「ふんわりと優しく」、「ギュっとしっかり」を使い分け
最小把持力2N✽1。 最大把持力25N✽2。 30
EH3
25 EH4
微細な電流制御により、把持力を細かく変更・調節できます。
繊細な部品から、滑りやすいワークまで、 20
ときに優しく、ときにしっかり、適切に把持します。 15
✽1 EH3-AZAKHの場合(参考値) 10
✽2 EH4-AZAKHの場合 5
00 10 20 30 40 50 60 70 80 90 100
運転電流値 [%]
2
把持力 [N]
Page3
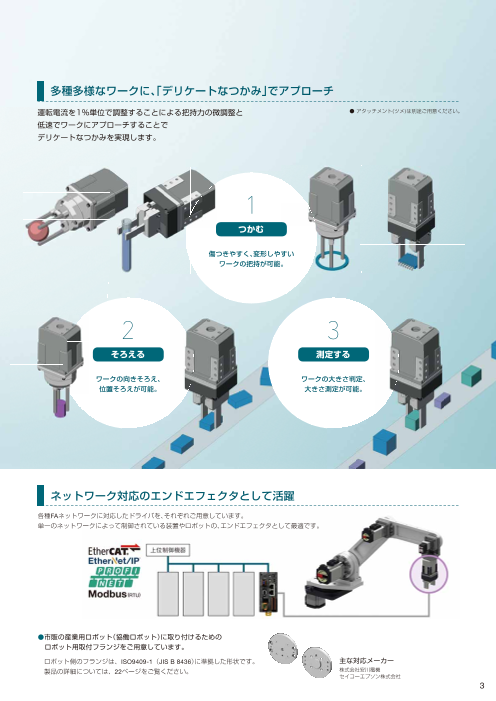
多種多様なワークに、「デリケートなつかみ」でアプローチ
運転電流を1%単位で調整することによる把持力の微調整と ● アタッチメント(ツメ)は別途ご用意ください。
低速でワークにアプローチすることで
デリケートなつかみを実現します。
つかむ
傷つきやすく、変形しやすい
ワークの把持が可能。
そろえる 測定する
ワークの向きそろえ、 ワークの大きさ判定、
位置そろえが可能。 大きさ測定が可能。
ネットワーク対応のエンドエフェクタとして活躍
各種FAネットワークに対応したドライバを、それぞれご用意しています。
単一のネットワークによって制御されている装置やロボットの、エンドエフェクタとして最適です。
●市販の産業用ロボット(協働ロボット)に取り付けるための
ロボット用取付フランジをご用意しています。
ロボット側のフランジは、ISO9409-1(JIS B 8436)に準拠した形状です。 主な対応メーカー
製品の詳細については、22ページをご覧ください。 株式会社安川電機
セイコーエプソン株式会社
3
Page4
駆動モーターに AZシリーズを搭載
● バッテリレスのアブソリュートセンサ内蔵、
外部センサ不要でモーター位置情報を常時監視 電動グリッパのドライバ・ケーブルは
AZシリーズと共通です。
● クローズドループ制御による高信頼性
● 高効率化により、モーター発熱低減、省エネルギー
バッテリレス 下記内容はAZシリーズの個別カタログ
アブソリュートセンサ またはWEBサイトをご覧ください。
(ABZOセンサ) ・ ドライバ仕様 ・通信仕様
・ 外形図(ドライバ、接続ケーブル)
・ 接続と運転 ・ ケーブル
● 2つ爪タイプと3つ爪タイプの比較
タイプ 2つ爪*1 3つ爪
四角 円筒、複雑な形状、球
把持に適した
ワーク形状
開時:
P.C.D.Φ30.9mm
可動範囲 閉時:
P.C.D.Φ7mm
25mm
開き幅:
Φ23.9mm
最大把持力[N] 25 50
許容荷重[N]
5 15
(許容アキシアル荷重[N]* 2 )
質量[kg] 0.38 0.38(取付カバー付)/0.28(取付カバーなし)
*1 仕様は型番4の値です。
*2 3つ爪タイプの場合です。
4
Page5
電動グリッパ EHシリーズの基本性能
小型・軽量 ロボットへの負担を最小限に 2つ爪・3つ爪
● EH3-AZAKH 42.5mm ●各関節の負担を軽減し、ロボット全体の小型化・コストダウン
に貢献
80.5mm
36mm
質量:200g
● EH4-AZAKH 48.5mm
91mm 小型・軽量
負担減
46mm
質量:380g
● EH4T-AZAKH
48.5mm
98mm
46mm
質量:380g
● EH4T-AZAK ●取付カバーなしで、設計の自由度アップ・軽量化に貢献
47mm
90.5mm
46mm
質量:280g
小型・軽量 負担減
5
Page6
微細な把持力制御 指先での「つかみ」をリアルに再現 2つ爪・3つ爪
●2つ爪タイプの把持力と運転電流(参考値) ●破損しないように ●落下しないように
30 そっと把持 2段階の把持
EH3
25 EH4
20
15
10
5
00 10 20 30 40 50 60 70 80 90 100
運転電流値 [%]
●把持力の推移<イメージ図>
時間 時間
ロングストローク 形状の異なるワークにその場で対応 2つ爪
● EH3-AZAKH ●ワークの形状がバラバラでもアタッチメント交換なしで
運転を継続
15mm
● EH4-AZAKH
25mm
● アタッチメント(ツメ)は別途ご用意ください。
6
把持力 [N]
把持力
把持力
Page7
「デリケートなつかみ」を活用した用途例
つかむ 変形しやすいワーク、傷の付きやすいワークを確実につかみます。 2つ爪・3つ爪
つかむものに合わせて、把持力、把持時間、速度を自在に設定できます。
傷の付きやすいガラス、変形しやすい樹脂やばねなども安全、確実につかみます。
直前まで素早く→ゆっくりつかむ
高速でワークに接近。当たる直前に減速して、低速で押し付けることができます。 WEBサイトの「動画ライブラリー」にて動画を公開中
① ワークまで高速、低把持力で ② ワークをつかむ直前で減速、 ③ ワークをつかんだあと、
接近 ゆっくりワークをつかむ 押し当て運転を開始。
設定した把持力で保持
そろえる ワークの向きや位置をそろえることができます。 2つ爪・3つ爪
ワークの大きさに合わせてつかむことで、向きや位置をそろえることができます。
ワーク大 ワーク小
測定する 外部センサが無くてもワークの大きさを確認できます。 2つ爪
フィンガの動作範囲でワークの大きさや有無の判定
フィンガの動作範囲をドライバからの出力信号(TLC出力、AREA出力)によって確認することで、
ワークの大きさや有無を判定できます。
① OK(公差内) ② NG(公差外) ③ NG(ワークの入れ忘れ)
※AREA出力: モーターが設定されたエリア内にいるとき、出力される信号です。
①② ワークの大きさ判定 ③ ワークの有無判定 TLC出力 :押し当て運転中、出力トルクが設定したトルク制限値に達すると
ワークをつかんだときのアタッチメントの ワークをつかめているか 出力される信号です。
位置を確認し、大きさごとに選別できます。 どうかを判定できます。
グリッパからの位置情報をモニタして大きさ測定
電動グリッパからの位置情報を上位PLCでモニタすることで、ワークの大きさを測定できます。
Modbus
ワークの大きさ測定 ※位置情報モニタ機能:位置情報を上位システムに伝える機能です。
● アタッチメント(ツメ)は別途ご用意ください。
7
Page8
グリッパの動作プログラムをドライバに登録し、上位システムの負荷を分散
● 対象:位置決め機能内蔵タイプドライバ、ネットワーク対応ドライバ(EtherCATを除く)
EHシリーズは、センサなどの外部入力信号や、自身の出力信号の状態を利用しながら、ドライバに簡易的なシーケンスプログラムを登録できます。
単純な用途なら、START / STOPの指令だけで動作させることも可能です。
当社WEBサイトの「使い方ナビ」コンテンツにて、EHシリーズのプログラム事例をご紹介しています。
モーターの状態をリアルタイムでモニタリング
EHシリーズはをはじめとした、 AZシリーズ搭載の電動アクチュエータでは、ネットワークを通じ、モーターの状態を常に監視できます。
モーター温度モニタ 積算負荷モニタ ODO/TRIPモニタ
ロボットがケースなどに覆われていてもリアルタイ 瞬間的な負荷率のモニタのほか、一度のモーター 車の計器のように累積回転数をモニタできます。
ムで温度をモニタ可能です。 運転パターンにおける負荷率を面積で把握し、値と 設定した閾値に達した際にインフォメーション信号
して検出することが可能です。経年劣化など長期の 出力が可能です。メンテナンスなどに利用できま
負荷の変化を把握することが可能です。 す。
45℃
40℃ 任意の値で
運転パターン インフォメーション
出力可能
50℃ MOVE ON
出力 OFF
45℃ ODOメーター
積算負荷 (積算走行距離)
インフォメーション
の設定値
55℃ TRIPメーター
(走行距離)
積算負荷のイメージ 経年
● モニタリング項目の詳細については、AZシリーズの取扱説明書をご覧ください。
◆ 専用サポートソフト MEXE02( 無償ダウンロード)
運転データの編集やパラメータの設定など、基本的な設定がパソコンから
簡単におこなえます。また、簡易的なシーケンスプログラムを作成できます。 電気設計者じゃなくても
かんたんに扱えると好評!
移動量や速度などを、任意の
単位(mm、deg)で表示・入
力できます
簡易シーケンス機能で
プログラムを簡略化できます
設定のコピー・バックアップ
ができます
分かりやすい・使いやすい ティーチングも 信号の入力状況を確認できる
直感的な操作性 パソコンから可能 波形モニタも搭載
8
Page9
EHシリーズ ラインアップ
電動グリッパ
EH3-AZAKH EH4-AZAKH EH4T-AZAKH EH4T-AZAK
ドライバ(DC電源入力)
位置決め機能内蔵タイプ RS-485通信付き パルス列入力タイプ ネットワーク対応 miniドライバ
パルス列入力タイプ 位置決めユニット(パルス発振 FAネットワークを通じて、上位 ボックス型のドライバよ
位置決めデータをドライバに設 RS-485通信でモーターの位置、 器)からモーターをコントロー 制御機器からドライバを直接制 りさらに小型・軽量の、
定(256点)。ネットワークコン 速度、トルク、アラーム、温度のモ ル。 御可能。 ネットワーク対応ドライ
バータ(別売)を使用することで、 ニタが可能。 バです。バッテリ電源に
FAネットワーク制御が可能。 も対応しています。
◆ 繊細な動作ほど、空気圧グリッパよりEHシリーズがおすすめです!
2つ爪・3つ爪
1 0.02 2つ爪
mm/s
%単位で 空気圧グリッパでのスピードコントロー
空気圧グリッパでのレギュレータ(減
ラ(速度制御弁)調整が不要。ステッピング
把持力調整 圧弁)調整が不要。デジタル設定で、簡 単位で
単・微細に把持力を調整できます。 速度調整 モーターによる制御なので速度調整が簡
単で、低速での把持が可能です。
0.02 2つ爪
mm ABZOセンサ 2つ爪・3つ爪
ステッピングモーターの位置決め精
単位で 度の高さを活かしたグリッパです。さ で 詳細な位置情報をモニタできます。
2つ爪タイプでは、位置情報をワーク
移動量調整 まざまな形状のワークへのアプロー 位置モニタ の大きさ判定にも活用できます。
チを実現します。
9
Page10
■システム構成
● 電動グリッパと位置決め機能内蔵タイプのドライバまたはRS-485通信付きパルス列入力タイプのドライバを組み合わせ
た場合
I/O制御または、RS-485通信で使用した場合の構成例です。
電動グリッパ、ドライバ、接続ケーブル /可動接続ケーブルは別手配です。
● パルス列入力タイプのドライバを組み合わせた場合のシステム構成については、WEBサイトをご覧ください。
必ずご購入ください
必要に応じてご購入ください
ドライバ
電動グリッパ 接続ケーブル ➜ 13ページ
モーター/エンコーダ用
●接続ケーブルに継ぎ足して使用する「中継ケーブル」や可動部分に使用可能な
「可動ケーブル」などいろいろな種類・長さのケーブルをご用意しています。
DC電源用ケーブル ➜ WEBサイト
DC電源
(主電源)
サポートソフトMEXE02 お客様にて、
ご用意ください。
●サポートソフトMEXE02は USBケーブル
当社WEBサイトから
ダウンロードいただけます。
上位接続機器との接続は、I/O制御、FAネットワーク制御、
Modbus制御の3方式からお選びいただけます。 入出力信号用ケーブル ➜ WEBサイト
I/O制御の場合
ネットワーク
上 コンバータ
位 ➜ WEBサイト RS-485 通信ケーブル ➜ WEBサイト
制 FAネットワーク制御の場合
御
機
器
FLEX用通信ケーブル ➜ WEBサイト
Modbus制御の場合
●システム構成価格例
ケーブル
電動グリッパ ドライバ 接続ケーブル( 入出力信号用ケーブル
1m) コネクタ付タイプ(1m)
EH4-AZAKH AZD-KD CC010VZ2F2 CC24D010C-1
72,600円 42,900円 3,300円 8,200円
● 上記システム構成は一例です。他の組み合わせもございます。
ご注意
● モーターから出ているモーター/エンコーダケーブルは、ドライバに直接接続できません。ドライバに接続する場合は、接続ケーブルをお使いください。
10
Page11
● 電動グリッパとネットワーク対応ドライバを組み合わせた場合
EtherNet/IP対応ドライバで I/O制御または、EtherNet/IPで使用した場合の構成例です。
電動グリッパ、ドライバ、接続ケーブル /可動接続ケーブルは別手配です。
必ずご購入ください
必要に応じてご購入ください お客様にて、
必ずご用意ください。 DC電源用ケーブル ➜ WEBサイト ドライバ
DC24V電源
(制御用)
電動グリッパ 接続ケーブル ➜ 13ページ
モーター/エンコーダ用
●接続ケーブルに継ぎ足して使用する「中継ケーブル」や可動部分に使用可能な
「可動ケーブル」などいろいろな種類・長さのケーブルをご用意しています。
サポートソフトMEXE02 DC電源用ケーブル ➜ WEBサイト
DC電源
(主電源)
お客様にて、
ご用意ください。
●サポートソフトMEXE02は当社WEBサイト USBケーブル
からダウンロードいただけます。
入出力信号用ケーブル ➜ WEBサイト
I/O制御の場合
上
位
制
御
機
器 お客様にて、
ご用意ください。
EtherNet/IP通信ケーブル
●システム構成価格例
ケーブル
電動グリッパ ドライバ 接続ケーブル( 入
1m) 出力信号用ケーブル
汎用タイプ(1m)
EH4-AZAKH AZD-KEP CC010VZ2F2 CC16D010B-1
72,600円 48,400円 3,300円 2,200円
● 上記システム構成は一例です。他の組み合わせもございます。
ご注意
● モーターから出ているモーター/エンコーダケーブルは、ドライバに直接接続できません。ドライバに接続する場合は、接続ケーブルをお使いください。
11
Page12
■品名の見方
● 電動グリッパ
EH 4 T - AZ A K H ① シリーズ名 EH:EHシリーズ
② 型番 3:幅36mm×高さ36mm(フィンガ側)
4:幅46mm×高さ46mm(フィンガ側)
① ② ③ ④ ⑤ ⑥ ⑦
③ フィンガタイプ なし:2つ爪タイプ
T:3つ爪タイプ
④ 搭載モーター AZ:AZシリーズ
⑤ 付加機能 A:付加機能なし
⑥ モーター仕様 K:DC電源入力仕様
⑦ 形状 H:取付カバー付
なし:取付カバーなし
● ドライバ
AZD - K D ① ドライバ種類 AZD:AZシリーズドライバ
② 電源入力 K:DC24V
① ② ③ 種類 D:位置決め機能内蔵タイプ
X:RS-485通信付きパルス列入力タイプ
③ なし:パルス列入力タイプ
EP:EtherNet/IP対応
ED:EtherCAT ドライブプロファイル対応
PN:PROFINET対応
● 接続ケーブル /可動接続ケーブル
CC 050 V Z 2 F 2 ① CC:ケーブル
長さ 005:0.5m 010:1m 015:1.5m
① ② ③ ④ ⑤ ⑥ ⑦ 020:2m 025:2.5m 030
② :3m
040:4m 050:5m 070:7m
100:10m 150:15m 200:20m
③ 追番
④ 適用機種 Z:AZシリーズ用
⑤ 追番 2:取付角寸法 20mm、28mm用
⑥ ケーブル種類 F:接続ケーブル
R:可動接続ケーブル
⑦ ケーブル仕様 2:DC電源入力用
12
Page13
■種類と価格
● 電動グリッパ
◇ 2つ爪タイプ ◇ 3つ爪タイプ ◇ 3つ爪タイプ
取付カバー付 取付カバー付 取付カバーなし
品名 定価 品名 定価 品名 定価
EH3-AZAKH 72,600円 EH4T-AZAKH 72,600円 EH4T-AZAK 68,600円
EH4-AZAKH 72,600円
● ドライバ
◇ 位置決め機能内蔵タイプ ◇ RS-485通信付き ◇ パルス列入力タイプ
パルス列入力タイプ
品名 定価 品名 定価 品名 定価
AZD-KD 42,900円 AZD-KX 42,900円 AZD-K 37,400円
◇ EtherNet/IP対応 ◇ EtherCAT ◇ PROFINET対応
ドライブプロファイル対応
品名 定価 品名 定価 品名 定価
AZD-KEP 48,400円 AZD-KED 48,400円 AZD-KPN 48,400円
● 接続ケーブル /可動接続ケーブル
ケーブルが屈曲される場合には、可動接続ケーブルをお使いください。
◇ モーター/エンコーダ用
種類 長さ(m) 品名 定価 種類 長さ(m) 品名 定価
0.5 CC005VZ2F2 3,300円 0.5 CC005VZ2R2 7,400円
1 CC010VZ2F2 3,300円 1 CC010VZ2R2 7,400円
1.5 CC015VZ2F2 3,800円 1.5 CC015VZ2R2 8,000円
2 CC020VZ2F2 4,400円 2 CC020VZ2R2 8,700円
2.5 CC025VZ2F2 4,900円 2.5 CC025VZ2R2 9,200円
3 CC030VZ2F2 5,500円 3 CC030VZ2R2 9,700円
接続ケーブル 可動接続ケーブル
4 CC040VZ2F2 8,500円 4 CC040VZ2R2 11,100円
5 CC050VZ2F2 9,600円 5 CC050VZ2R2 12,400円
7 CC070VZ2F2 11,900円 7 CC070VZ2R2 15,800円
10 CC100VZ2F2 15,500円 10 CC100VZ2R2 20,700円
15 CC150VZ2F2 21,400円 15 CC150VZ2R2 29,200円
20 CC200VZ2F2 27,200円 20 CC200VZ2R2 37,500円
■付属品
● 電動グリッパ
2つ爪タイプ 3つ爪タイプ
取扱説明書 1式 なし
● ドライバ
付属品
タイプ コネクタ
位置決め機能内蔵タイプ
CN1用(1個)
RS-485通信付きパルス列入力タイプ
パルス列入力タイプ CN4用(1個)
EtherNet/IP対応 CN1用(1個)
EtherCATドライブプロファイル対応 CN4用(1個)
PROFINET対応 CN7用(1個)
● リッド制御システム
接続ケーブル /可動接続ケーブル アクチュエータと組み合わせる ハイブ
AZシリーズ
バッテリレス アブソリュートセンサ搭載 AZシリーズ
ドライバ、ケーブルは AZ miniドライバ
DC電源入力
モバイルオートメーション対応製品
付属品
タイプ 取扱説明書 シリーズと共通です。 ハイブリッド制御システム アルファステップ
接続ケーブル − AZシリーズは、個別カタログ
可動接続ケーブル 1式 をご用意しています。
製品の選定にあたっては、個別カタロ
グ(V-184)または、miniドライバの個 ボックス型のドライバより、さらに小さく。
AZシリーズに、miniドライバという選択肢をご用意しました。
バッテリ駆動にも対応し、今まで以上にさまざまな用途でご活用いただけます。
別カタログ( EtherCAT EtherNet/IP™対応 PROFINET対応 RS-485通信タイプ RS-485通信付き
V-209)を合わせてお使い ドライブプロファイル対応 パルス列入力タイプ
ください。 AZD-KRED AZD-KREP AZD-KRPN AZD-KR2D AZD-KRX
13
Page14
■仕様表の用語説明
タイプ 2つ爪 3つ爪
最大把持力 ワークを把持する最大の力です。
同じ位置に同じ方向から繰り返し位置決めをおこなったときに、
繰り返し位置決め精度 どれだけの誤差が生じるかを表した値です。 -
(精度は一定温度、一定負荷での値です。)
バックラッシ モーター軸を固定したときのフィンガの遊びのことです。 -
ストローク フィンガが開閉できる最大の距離です。 -
把持径 - 把持するワークの直径です。
減速比 - モーターからの入力回転速度とフィンガの回転速度の比です。
最高速度 フィンガが開閉できる最高の速度です。
最大加速度 フィンガが開閉できる最大の加速度です。 -
押し当て速度 押し当て運転(把持動作)での運転速度です。
最小移動量 出荷時に設定されている1パルスあたりの移動量です。 -
許容荷重 許容できる外力のことです。 -
静的許容モーメント 把持時に許容できるモーメントのことです。 -
許容アキシアル荷重 - フィンガの軸方向にかけられる許容荷重です。
許容ラジアル荷重 - フィンガの直角方向にかけられる許容荷重です。
● 負荷モーメント判定式
|MP| |MY| |MR|
+ + ≦1
MP MY MR フィンガ
MP:ピッチング方向の負荷モーメント(N·m)
MY:ヨーイング方向の負荷モーメント(N·m) アタッチメント
MR:ローリング方向の負荷モーメント(N·m)
MP:ピッチング方向の許容モーメント(N·m)
MY:ヨーイング方向の許容モーメント(N·m) 許容荷重
MR:ローリング方向の許容モーメント(N·m) 負荷
MP MR
MY
● ラジアル荷重と把持位置の関係(参考値)
55
把持位置 L
50
45
40
35
30
25
20
15
10
ラジアル荷重 5
00 5 10 15 20 25 30 35 40 45 50
把持位置 L [mm]
14
許容ラジアル荷重 [N]
Page15
■仕様
● 2つ爪タイプ
アクチュエータ品名 取付カバー付 EH3-AZAKH EH4-AZAKH
搭載モーター(AZシリーズ) AZM14 AZM24
最大把持力[N] 7 25
繰り返し位置決め精度[mm] 片側 ±0.02 ±0.02
バックラッシ[mm] 片側 0.2 0.1
両側 15 25
ストローク[mm]
片側 7.5 12.5
両側 156 156
最高速度[mm/s]
片側 78 78
両側 20 20
最大加速度[m/s2]
片側 10 10
両側 20 20
押し当て速度[mm/s]
片側 10 10
両側 0.02 0.02
最小移動量[mm]
片側 0.01 0.01
許容荷重[N] 2 5
静的許容モーメント[N·m]✽ MP:0.7 MY:0.2 MR:0.2 MP:1.2 MY:0.12 MR:0.4
✽ フィンガ先端の静的許容モーメントです。負荷とアタッチメントの質量、把持力(衝撃荷重含む)などを考慮してお使いください。
ご注意
● 実際に搬送できる負荷の質量は、アタッチメント、負荷の摩擦係数、加速度などによって大幅に変化します。
把持力の1/10を上限とし、十分に余裕を持ってお使いください。
● 3つ爪タイプ
取付カバー付 EH4T-AZAKH
アクチュエータ品名
取付カバーなし EH4T-AZAK
搭載モーター(AZシリーズ) AZM24
減速比 5
最大把持力[N] 50
把持径[mm]✽1✽2 把持物の外径を把持 ϕ2∼ϕ24
把持物の内径を把持 ϕ14∼ϕ36
最高速度[r/min]✽3 1200
押し当て速度[r/min]✽3 12
許容アキシアル荷重[N] 15
許容ラジアル荷重[N]✽4 23
✽ 1 把持物の直径(D)に対して、約0.5 mm(最小値)のクリアランスを考慮した値です。
✽ 2 アタッチメントの直径(d)がϕ6 mmの場合です。
✽ 3 フィンガの回転速度です。
✽ 4 アタッチメント取付面から10 mmの値です。負荷とアタッチメントの質量、および把持力(衝撃荷重を含む)を合計した値です。
ご注意
● 実際に搬送できる負荷の質量は、アタッチメント、負荷の摩擦係数、加速度などによって大幅に変化します。
把持力の1/10を上限とし、十分に余裕を持ってお使いください。
● 把持物とアタッチメントの設計によっては、把持力が最大把持力を超える場合があります。
このような状態で使用すると、製品が破損するおそれがあります。
最大把持力を超える場合は、実際の把持力が最大把持力よりも小さくなるように、運転電流を調整してください。
15
Page16
■押し当て力(把持力)と電流の関係
電動グリッパの把持動作は、押し当て運転によって行ないます。
押し当て力(把持力)は、運転電流で設定します。
●2つ爪タイプ 押し当て力(把持力)参考値
押し当て力(把持力)と電流の参考値を示します。
実際の押し当て力(把持力)は実機で確認してください。
フィンガ
アタッチメント
押し当て力(把持力):(F N)
EH3-AZAKH EH4-AZAKH
8 30
7
25
6
20
5
4 15
3
10
2
5
1
00 10 20 30 40 50 60 70 80 90 100 00 10 20 30 40 50 60 70 80 90 100
運転電流値 [%] 運転電流値 [%]
●押し当て運転の把持力は、7N以下に設定してください。 ●押し当て運転の把持力は、25N以下に設定してください。
●押し当て運転の運転速度は、10mm/s以下(片側)に設定してください。 ●押し当て運転の運転速度は、10mm/s以下(片側)に設定してください。
●3つ爪タイプ 押し当て力(把持力)参考値
各運転電流における、把持物の外径 (または内径 )・アタッチメント直径と把持力の参考値を示します。
実際の押し当て力(把持力)は実機で確認してください。
3つ爪タイプは、把持するワークの大きさによって把持力が変化します。
フィンガ d
アタッチメント
F D
把持物
正面図
F:把持力[N]
d:アタッチメントの直径[mm]
D:把持物の外径(または内径)[mm]
● 把持物・アタッチメントの直径と押し当て力(把持力)の関係[参考値]
把持力は運転電流値(%)で設定することができます。
60 ・把持物の外径を把持する場合
最大把持力
D+d:ピッチ円直径[mm]
50
40 ・把持物の内径を把持する場合
100% D−d:ピッチ円直径[mm]
30
80%
20 60%
40%
10
20%
0
0 5 10 15 20 25 30 35
ピッチ円直径 ( D±d ) [mm]
16
把持力 ( F ) [N] 把持力 [N]
把持力 [N]
Page17
◇把持力・把持径 計算式
把持力は以下の計算式で求めることができます。
●把持物の直径に応じて把持力が変化するため、把持物の大きさ、質量、強度などに合わせて把持力を調整してください。
フィンガ d θ
アタッチメント
F D
把持物
r
正面図 フィンガの動作
F:把持力[N] r:アタッチメントの回転半径[mm](=6.4)
d:アタッチメントの直径[mm] θ:フィンガの回転角度[°]
D:把持物の外径(または内径)[mm]
●把持力の計算式 ●把持径の計算式
F= 0.174 ÷sin {θ−tan -1( r×sinθ )} ●把持物の外径を把持する場合
r×10-3 9.05+r×cosθ
D=2×√(9.05+r×cosθ)2+(r×sinθ)2−d
●把持物の内径を把持する場合
D=2×√(9.05+r×cosθ)2+(r×sinθ)2+d
■ドライバ部仕様
品名 AZD-KD、AZD-KX、AZD-K AZD-KEP、AZD-KED、AZD-KPN
EH3
入力電圧 DC24V±5%
EH4
主電源
EH3 0.5A 0.4A
入力電流
EH4 1.6A 1.6A
入力電圧 − DC24V±5%
制御電源
入力電流 − 0.15A
■一般仕様
電動グリッパ ドライバ
耐熱クラス 13(0 B) −
以下の通りにDC500Vメガーにて測定した値が100MΩ以 以下の通りにDC500Vメガーにて測定した値が100MΩ以
絶縁抵抗 上あります。 上あります。
· ケース―モーター巻線間 · 保護接地端子―電源端子間
絶縁耐圧 以下の通りに1分間印加しても異常を認めません。
· ケース―モーター巻線間 −
AC0.5 kV 50Hzまたは60Hz
周囲温度 0∼+40˚C( 凍結のないこと)✽ 0∼+50˚C( 凍結のないこと)
使用環境(動作時) 周囲湿度 85%以下(結露のないこと)
雰囲気 腐食性ガス ·塵埃のないこと。水、油などが直接かからないこと。
保護等級 − IP10
✽ 当社測定条件による
ご注意
●絶縁抵抗測定、絶縁耐圧試験をおこなうときは、モーターとドライバを切り離してください。また、モーターのABZOセンサ部は、これらの試験をおこなわないでください。
17
Page18
■移動方向
出荷時の移動方向は、次のように設定されています。
● 2つ爪タイプ
移動方向 移動方向
内側に移動 外側に移動 動移に側外
+側(CW) −側(CCW)
● 3つ爪タイプ
移動方向 移動方向 移動方向
内側に移動(閉じる) 原点(開く) 内側に移動(閉じる)
-側(CCW) +側(CW)
18
Page19
■外形図 (単位 mm)
● 2つ爪タイプ 取付カバー付
品名 質量kg 2D CAD
EH3-AZAKH 0.2 D7908
(42.5)
+
B部詳細 A部詳細 4×M3 深さ 0.012
5 18 24.5 ϕ6 0 (H7) 深さ3
(R) (R) (R)
A
+0.018
3 0 穴 1
25±0.2
4×M3 深さ5
36 (反対側も同様)
+0.018
29±0.2 ϕ3 0 深さ3 29±0.2
(反対側も同様)
DF62B-13EP-2.2C
4×M3 深さ5 (ヒロセ電機株式会社)
モーターリード線
+0.018
ϕ3 0 深さ3
A C
140
C部詳細
B (
8 2×M2.5 穴 R
0.5 0.5 ) (R
)
10±0.2 メカ限界位置 6 6 メカ限界位置
16 原点 原点
30.6 0∼15(可動範囲) 1
● 色部分は、可動部です。
19
28 16±0.2
3.5 8±0.2 (3.5)
(R)
1
+
3 0.
0 0 1 8 深さ3
80.5
32 16±0.2
8.2±0.5 8±0.2 25±0.2
27
+0.018
3 0 深さ3
(反対側も同様)
Page20
品名 質量 kg 2D CAD
EH4-AZAKH 0.38 D7903
(48.5)
23.5 25 4×M4 深さ6
B部詳細 A部詳細
(R
) (R) (R)
A
(R)
+0.03
3 1
0 穴
+0.015
25±0.2 ϕ10 0 (H7) 深さ3
36
+0.018
24±0.2 ϕ3 0 深さ3 39±0.2
(反対側も同様)
4×M4 深さ6
+0.018
ϕ3 0 深さ3 4×M4 深さ6 (反対側も同様)
A C 130
モーターリード線 DF62B-13EP-2.2C
(ヒロセ電機株式会社)
B C部詳細
14.5 (R)
24 2×M3 穴 (R)
±0.2
41.2
0.5 0.5
メカ限界位置 6.5 6.5 メカ限界位置 1
原点 原点
0∼25(可動範囲)
● 色部分は、可動部です。
20
37.5 18±0.2 (3.2)
3.2 9±0.2 0.6
+0.018
32 (34) 3 0 深さ3
91
36 30 46
42 18±0.2 (36)
9±0.2 25±0.2
8.7±0.5
+0.018
3 0 深さ3
(反対側も同様)