


本書は、モータトルクの計測に関連する様々な技術について理解を深め、
モータの開発や検査に役立 てて頂くために作成しました。
装置を導入する前にどのような方法で何を計測すればよいかを考えるヒントとして、
あるいは導入済み の装置をより効果的に利用することや、各機器の動作原理を理解
して正しく計測できているかを考察するためにご活用ください。
■■■■■ 目次 ■■■■■
*ヒステリシスブレーキの特性
・ヒステリシスブレーキのドラッグトルクとは? ドラッグトルク vs. 回転数 の特性
・ヒステリシスブレーキのトルク安定性について。 電流 vs. トルク の特性
・ヒステリシスブレーキの渦電流について。 回転数 vs. トルク の特性
・ヒステリシスブレーキのコギング (残留磁化)
・コンプレッサー空冷式ヒステリシスブレーキ AHB シリーズの空冷圧力 vs. 負荷電力
*トルクの計測
・極低速回転時のトルク計測
・ねじれ共振のトルク信号への影響
・トルク計測の精度
*回転数・角度の計測
・単相のロータリエンコーダ
・AB 相のロータリエンコーダ
このカタログについて
| ドキュメント名 | モータトルクの計測技術集 |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| ファイルサイズ | 1.2Mb |
| 取り扱い企業 | 株式会社東陽テクニカ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
モータトルクの計測技術集
本書は、モータトルクの計測に関連する様々な技術について理解を深め、モータの開発や検査に役立
てて頂くために作成しました。
装置を導入する前にどのような方法で何を計測すればよいかを考えるヒントとして、あるいは導入済み
の装置をより効果的に利用することや、各機器の動作原理を理解して正しく計測できているかを考察す
るためにご活用ください。
作成者:株式会社 東陽テクニカ 機械制御計測部 Magtrol 担当
作成日:2020 年 5 月 8 日
Page2
■■■■■ 目次 ■■■■■
.................................................................................................................. 2
1.1 ヒステリシスブレーキのドラッグトルクとは? ドラッグトルク vs. 回転数 の特性 ...................................... 2
1.2 ヒステリシスブレーキのトルク安定性について。 電流 vs. トルク の特性 ................................................. 3
1.3 ヒステリシスブレーキの渦電流について。 回転数 vs. トルク の特性 ..................................................... 4
1.4 ヒステリシスブレーキのコギング (残留磁化) .......................................................................................... 4
1.5 コンプレッサー空冷式ヒステリシスブレーキ AHB シリーズの空冷圧力 vs. 負荷電力 ................................. 5
..................................................................................................................................... 6
2.1 極低速回転時のトルク計測 ............................................................................................................... 6
2.2 ねじれ共振のトルク信号への影響 ....................................................................................................... 7
2.3 トルク計測の精度 .............................................................................................................................. 9
....................................................................................................................... 10
3.1 単相のロータリエンコーダ ................................................................................................................... 10
3.2 AB 相のロータリエンコーダ ................................................................................................................. 11
1
Page3
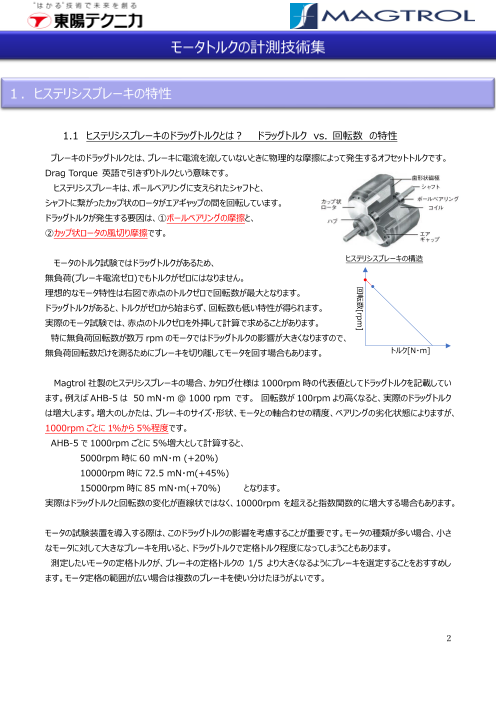
1.1 ヒステリシスブレーキのドラッグトルクとは? ドラッグトルク vs. 回転数 の特性
ブレーキのドラッグトルクとは、ブレーキに電流を流していないときに物理的な摩擦によって発生するオフセットトルクです。
Drag Torque 英語で引きずりトルクという意味です。
ヒステリシスブレーキは、ボールベアリングに支えられたシャフトと、
シャフトに繋がったカップ状のロータがエアギャップの間を回転しています。
ドラッグトルクが発生する要因は、①ボールベアリングの摩擦と、
②カップ状ロータの風切り摩擦です。
ヒステリシスブレーキの構造
モータのトルク試験ではドラッグトルクがあるため、
無負荷(ブレーキ電流ゼロ)でもトルクがゼロにはなりません。
理想的なモータ特性は右図で赤点のトルクゼロで回転数が最大となります。
ドラッグトルクがあると、トルクがゼロから始まらず、回転数も低い特性が得られます。
実際のモータ試験では、赤点のトルクゼロを外挿して計算で求めることがあります。
特に無負荷回転数が数万 rpm のモータではドラッグトルクの影響が大きくなりますので、
無負荷回転数だけを測るためにブレーキを切り離してモータを回す場合もあります。 トルク[N・m]
Magtrol 社製のヒステリシスブレーキの場合、カタログ仕様は 1000rpm 時の代表値としてドラッグトルクを記載してい
ます。例えば AHB-5 は 50 mN・m @ 1000 rpm です。 回転数が 100rpm より高くなると、実際のドラッグトルク
は増大します。増大のしかたは、ブレーキのサイズ・形状、モータとの軸合わせの精度、ベアリングの劣化状態によりますが、
1000rpm ごとに 1%から 5%程度です。
AHB-5 で 1000rpm ごとに 5%増大として計算すると、
5000rpm 時に 60 mN・m (+20%)
10000rpm 時に 72.5 mN・m(+45%)
15000rpm 時に 85 mN・m(+70%) となります。
実際はドラッグトルクと回転数の変化が直線状ではなく、10000rpm を超えると指数関数的に増大する場合もあります。
モータの試験装置を導入する際は、このドラッグトルクの影響を考慮することが重要です。モータの種類が多い場合、小さ
なモータに対して大きなブレーキを用いると、ドラッグトルクで定格トルク程度になってしまうこともあります。
測定したいモータの定格トルクが、ブレーキの定格トルクの 1/5 より大きくなるようにブレーキを選定することをおすすめし
ます。モータ定格の範囲が広い場合は複数のブレーキを使い分けたほうがよいです。
2
回転数[rpm]
Page4
1.2 ヒステリシスブレーキのトルク安定性について。 電流 vs. トルク の特性
ヒステリシスブレーキは、鉄製のカップ状ロータと歯形形状の磁極のステータが非接触に
合わさった構造です。ステータには、コイルが巻かれており、コイルに流す直流電流の
大きさに比例して、歯形形状の磁極が電磁石のように磁化します。ロータとの間の空隙に
磁界が発生し、透磁率の高い鉄製のカップ状ロータが磁化されます。
ステータの磁界とロータ磁化の相互作用により回転方向と反対向きの力が発生し、ブレーキ力となります。
ブレーキ力(トルク)のもととなる磁束は、コイルに流す直流電流の大きさに比例します。
一般的にブレーキ制御に使用する直流電源の制御モードには、電流一定制御と電圧一定制御がありますが、電流一
定制御で使用することで、トルクが安定します。電圧一定制御では、ブレーキの発熱によりコイルの抵抗値が変わり電流
が変わるためトルクも変わってしまいます。
右図はヒステリシスブレーキの電流 vs.トルクの特性曲線です。
鉄製のカップ状のロータのヒステリシス特性により、ブレーキ電流を上げる時と下げる時で、
トルク特性が変わりますが、トルクは電流に比例し、トルクの制御性が高いことがわかります。
より再現性よくトルクを設定したい場合は、電流をゼロから上げ続けて固定するとよいです。
ブレーキ電流を同じように印加した時のトルクの再現性は、1%以内になります。
ドラッグトルクや渦電流の影響を考慮する必要がありますが、ブレーキ電流を一定にしておけば、回転速度に関係なく、
長時間でもほぼ一定のトルクで安定します。また、物理的な摩擦なしで電磁的にブレーキ負荷を発生しますので、トルク
のムラ(ノイズ)が少ない滑らかな動作になります。
ヒステリシスブレーキの電流 vs.トルク特性曲線の設計値は、Magtrol 社の HP からダウンロードできます。
HB シリーズ:https://www.magtrol.com/product/hysteresis-brakes/
AHB シリーズ:https://www.magtrol.com/product/ahb-series-compressed-air-cooled-hysteresis-brakes/
BHB シリーズ:https://www.magtrol.com/product/bhb-series-blower-cooled-hysteresis-brakes/
ヒステリシスブレーキの電流 vs.トルク特性は、±10%程度の個体差があります。このため購入と同時のオプションとして、
実際に製造したブレーキの電流 vs.トルク特性データを添付することも可能です。
より厳密に PID トルク制御や PID 回転数制御を行う場合やトルク値の計測を行う場合は、トルク計及びコントローラ
DSP7000 を使用する必要があります。
3
Page5
1.3 ヒステリシスブレーキの渦電流について。 回転数 vs. トルク の特性
ヒステリシスブレーキのコイルに電流を流すと、ステータが磁化してブレーキのロータに磁気的な摩擦力が発生します。ロ
ータが回転すると、磁束の影響でわずかな渦電流が発生し、同じ電流値でも回転数に比例してトルクが増大します。
ブレーキのサイズが大きいほどロータの表面速度が速くなり、かつロータの断面積も大きくなります。そのため、特に大型のダ
イナモメータで渦電流の影響が大きくなります。
HD-800(定格 14N・m)以上のダイナモメータでは、静止状態で一定の電流を加えていた場合に比べて
10% / 1000rpm のトルク増加となります。
小さなダイナモメータでは、一般的に 2% / 1000rpm から 4% / 1000rpm です。
1.4 ヒステリシスブレーキのコギング (残留磁化)
磁束
右の図は、ヒステリシスブレーキの断面を示しています。 ステータ(ポール)
ロータ
ヒステリシスブレーキは、軸が回っていない状態のまま
印加されている電流を下げると(磁束を減らすと)、 ステータ(ケース)
ロータに加わっていた磁化状態が残ってしまいます。
するとロータに残った磁極がステータのケースとポールの間に
留まろうとします。この状態をコギングと呼んでいます。
この状態でブレーキの軸を回転させると、ガタガタと回ってしまい、
トルク計測等の試験に影響を及ぼします。
ヒステリシスブレーキの残留磁場を除去する方法:
残留磁場がある場合、試験を始める前に除去する必要があります。
除去の手順:
1. ブレーキのシャフトにモータやトルク計が接続されている場合は取り外します。
2. ブレーキ電源のスイッチを入れます。
3. ブレーキのシャフトを回しながら、徐々にブレーキ電流を上げていき、軸がガタガタせずスムーズに回るところまで
電流を上げます。
4. 軸がスムーズに回ったら、軸を回し続けながら、電流を徐々に下げて 0 にします。
5. 軸がガタガタせず、スムーズに回っていることを確認して、ブレーキ電源のスイッチを切ります。
以上の操作で、残留磁場が除去されます。
4
Page6
1.5 コンプレッサー空冷式ヒステリシスブレーキ AHB シリーズの空冷圧力 vs. 負荷電力
Magtrol 社製の AHB シリーズは、エアコンプレッサーで冷却することで大きな負荷電力で使うことができますが、カタロ
グ仕様の上限能力で空冷するには容量の大きな専用のコンプレッサーが必要になります。また、騒音が大きいため耳を保
護するか、専用の防音実験室に設置する必要があります。
1N・m の AHB-1 の場合、仕様の上限は 620 kPa, 283 Liter/min、可能な負荷電力は 1200W です。騒音レ
ベルは、噴出し口から 1m 離れた場所でおよそ 110dB となります。
大きなコンプレッサーが用意できない場合や音を下げて使いたい場合には、実際に使用する負荷電力に応じて空冷圧
力を下げることができます。 例えば半分の 600W で足りる場合は、空冷圧力も半分の 310 kPa 程度となります。
圧力を下げて使う場合、ブレーキの温度が上昇しすぎないようにステータの表面温度を熱電対等で監視することをおす
すめします。温度が 80℃を超えても上昇を続ける場合は、圧力を上げて十分に冷えるように調整してください。
5
Page7
2.1 極低速回転時のトルク計測
モータの回転数が 1rpm 以下の極低速回転の場合、トルクの計測値がすぐに立ち上がらないため注意が必要です。
トルク計の回転軸には、ねじれ度(剛性) [N・m/rad] が定まっている変形領域があります。
被試験モータに対してブレーキで負荷を与えたとき、そのトルクに応じた
角度だけ軸が回らないと、トルク値として検出できないということです。
例えば Magtrol 社製の定格 1N・m のトルク計 TM304 は、
ねじれ度が 145 [N・m/rad] です。これは 1N・m のトルクを検出するには、
0.395°の角度だけ回すことに相当します。モータの回転数が 0.1rpm の場合、
1 秒間に回る角度は 0.1rpm ÷ 60 秒 x 360° = 0.6° となります。
そのため、約 1 秒待たないと 1N・m トルク値として検出できません。 TM シリーズの断面図
このようにトルクの検出に遅れが発生する試験では、ブレーキ負荷をスイープ(少しずつ増やす)ではなく、ステップ(階段
状)に変化させて、トルク値が安定したところを抽出とすることで正しい評価が行えます。
一般的にトルク計測システムでは、装置系全体の中でトルク計の軸が最もねじれやすい(ねじれ度が小さい)ように設
計されます。しかし、軸を締結するカップリングがトルク計に近い剛性になることや、樹脂を使ったカップリングの場合はトルク
計より低い剛性になることもあります。そのため、トルク計とカップリングの両方のねじれ度を考慮して装置を設計したり、計
測方法を検討したりすることが重要です。
6
Page8
2.2 ねじれ共振のトルク信号への影響
回転機械は回転方向にねじれる力(トルク)に対して、共振を持った周波数特性になります。特にトルク計測装置の場
合、トルク計の検出部がねじれやすいように剛性が低くなっており、共振周波数が低くなります。
トルク計を含む装置は、右下図の Drive Train Model のように示すことができます。トルク計のねじれ度を Ct、トルク
計から左半分のイナーシャを J1、トルク計から右半分のイナーシャを J2 とします。このとき入力したトルクに対して、実際に
出力されるトルクが大きく増幅される共振周波数が f0 になります。
左下図の周波数 vs.出力振幅のグラフのように、両軸型のトルク計を用いた計測装置を構築した場合、一般的に共
振周波数は数百 Hz 程度の帯域にあることが多いです。共振周波数より低い帯域は増幅が小さくなり 0Hz(DC)で 1
になります。また、共振周波数より高い帯域は減衰していき、周波数が高くなると 1 より小さくなります。
右下図は 3D の周波数 vs.回転数 vs.トルク信号 FFT です。右斜め上に伸びているいくつかの線は、モータやブレー
キに関係した 1 回転中にトルク変動をする成分です。回転数が変わると、これらが共振周波数に近くなることでトルクが
増幅されます。
ブレーキ トルク計 被試験モータ Drive Train Model
J
1 C J
2
TM304~ t
TM308
Q
A :出力トルク振幅
J1 :イナーシャ[kg m2 ]
T :入力トルク振幅
T 1 J + J 1 2
A = 1 f 1 2 J2 :イナーシャ[kg m ]
0 = Ct
2 J J f0 :固有振動数 [Hz]
2 1 2
2 Q : quality factor
f f
1− 2 C :ねじれ度[Nm / rad]
f + ( ) t
0 Q f
0
トルク信号の FFT
共振周波数 f0 回転数
周波数
7
Page9
実際のトルク計測においては、上記のねじれ共振があることを理解して試験を実施し、評価をする必要があります。
トルクの DC 成分を評価する場合:
回転数によっては共振の影響でノイズが増えたように見えることがあります。瞬時値を取るとバラつきが大きくなりますの
で、平均化やローパスフィルタ処理が必要になります。
また、共振による増幅が非常に大きい場合、トルク計やカップリングの定格を大きく超えてトルク計を壊す可能性もありま
す。通常、モータの変動成分と共振帯域が重なると音や振動も大きくなります。なるべく共振帯域で長時間試験をせ
ず、共振帯域を避けて回転数を変えながら試験をすることをおすすめします。
トルクの変動成分(トルクリップル)を評価する場合:
トルク変動の周波数に応じて増幅/減衰の度合いが異なりますので、出力されたトルク値をそのまま絶対値として評価
することはできません。また、装置のイナーシャやねじれ度を用いて周波数特性カーブを計算し出力値を逆算しても、計
算の誤差があったり、モデルと実機との差があったりしますので、周波数の高いトルクリップルは相対値としての評価が一般
的です。
モデルと実機の差について、実機にはトルク計のほかにカップリングのねじれも発生しますので、複数の共振帯域が存在
します。さらに周波数に加えて位相の特性もあり複雑です。
8
Page10
2.3 トルク計測の精度
ここではトルク計測の精度に関連する用語を解説します。
感度 (Sensitivity) とは、定格トルク時の出力です。 Magtrol 社製のトルク計の 実測値
場合は±5V が基準です。トルク計の出荷検査では、定格トルクを加えた時の実際の
出力電圧値が記録されます。 感度 [Nm]
非直線性 (Linearity) とは、トルクを増加させた時の基準値との誤差です。
Magtrol 社製のトルク計の出荷検査では、CW 方向と CCW 方向それぞれに
基準値
6 か所の負荷点(合計 12 か所)の測定をしています。
ヒステリシスを含む非直線性 (Combined Error of Linearity and Hysteresis) とは、
トルクを増加および減少させた時の基準値との誤差です。
Magtrol 社製のトルク計の出荷検査では、上記の Linearity に加えて、トルクを減少させた
場合も同様に 12 か所の負荷点(合計 24 か所)の測定をしています。
Magtrol 社製のトルク計は、ヒステリシスを含む非直線性の負荷点に対して最小二乗近似
をして、基準値と近似値の差が定格トルクに対して±0.1%以内で合格としています。
メーカによっては非直線性だけを記載して良い数値を示している場合もありますので、
どの方法で評価した精度なのかを確認する必要があります。
トルク計には、ゼロ点と感度の温度影響もあります。Magtrol 社製のトルク計は 23℃で校正されており、ここから温度が
変わると 定格トルクの±0.1%以下 / 10℃あたり 精度に影響があります。
ゼロ点の回転数の影響もあります。
Magtrol 社製のトルク計の場合は、定格トルクの±0.01%以下 / 1000rpm あたり 精度に影響があります。
9
Page11
3.1 単相のロータリエンコーダ
モータを一定方向に連続回転させる試験の場合、モータの回転数 [rpm] の計測には単相のロータリエンコーダが使
われます。Magtrol 社製のダイナモメータや TM シリーズトルク計は 0-5V の矩形波(パルス)が 60[パルス/回転(ppr)]
や 30ppr のものが使われています。
スリット円盤
出力帯域 max.100kHz 入力帯域 max.200kHz
3411 表示計
DSP7000 コントローラ
0-5V パルス
パルスから周波数に変換し回転数算出
発光ダイオード フォトトランジスタ
エンコーダから出力されたパルスは、表示計等で周波数に変換して回転数が算出されます。
60ppr のエンコーダの場合、計測できる回転数の範囲は 10~100,000rpm、 分解能は 1rpm です。
上限の 100,000rpm は、エンコーダの出力帯域 max.100kHz による制限です。汎用的なエンコーダは 50kHz や
100kHz 程度の帯域のものが多いです。一般的にパルス電圧は周波数が高くなるとパルスの立ち上がりが鈍り、5V に
達する前に電圧が下がります。そのため、周波数が高くなると 0V/5V のカウントができなくなります。パルス数を 600ppr
にした場合は、計測できる最大回転数が 10,000rpm になります。
下限の 10rpm は、表示計側でのサンプリング処理による制限です。
10rpm(1 分間の回転数)で 60ppr の場合、1 秒間では 1/6 回転 x 60ppr、つまり 10 [パルス/秒] です。
Magtrol 社製の 3411 表示計や DSP7001 コントローラは 1 秒間に 5 回から 10 回程度の表示更新周期のため、
この周期の間に 1 パルス以上のカウントができる下限が 10rpm となります。
ギヤ付きのモータで最大回転数が 100rpm 程度の場合、1000ppr や 6000ppr などパルス数を増やすことで、より低
速回転の計測が可能です。
6000ppr の場合、計測できる回転数の範囲は 0.1~1,000rpm、 分解能は 0.01rpm です。
10
Page12
3.2 AB 相のロータリエンコーダ
モータが往復運動をする場合や角度を測る場合には、0-5V パルスが 2 系列ある A/B 相のロータリエンコーダが使わ
れます。A 相と B 相はパルスの 1/4 周期分だけずれており、回転位置に応じて A 相と B 相の組み合わせに 4 つの状
態があります。 1 2 3 4
1. A:Lo, B:Lo Hi
A 相
2. A:Hi, B:Lo
L o
3. A:Hi, B:Hi Hi
B 相
4. A:Lo, B:Hi
L o
1→2→3→4→1… の順に状態が変わった場合と、その逆の場合で回転方向が分かります。
また、パルスの 1 周期分で 4 つの状態があるため、単相のエンコーダに比べて 4 倍の角度分解能があります。
例えばパルス数 360 の AB 相エンコーダは、 360° ÷ 360ppr ÷ 4 = 0.25° の分解能です。
AB 相のエンコーダと接続する表示計やデータロガーには、専用のカウンターチャンネルが付いている必要があります。
Magtrol 社製の 3411 表示計は AB 相エンコーダに対応していますが、DSP7001 コントローラは対応していません。
汎用的な AB 相のエンコーダも出力帯域が 100kHz 程度の帯域のものが多いです。そのため、回転数が速くて角度
も細かく測りたいという場合は帯域の制限にかからないよう注意する必要があります。
100kHz に近い領域で計測する場合は、シールド付きのツイストペアケーブルを使う、ケーブル長をなるべく短くする、
など高周波信号についての対応をすることをおすすめします。
11
Page13
■■■■■ 改訂履歴 ■■■■■
2020/05/08 新規作成
1.ヒステリシスブレーキの特性:5 項目、 2.トルクの計測:3項目、 3.回転数・角度の計測:2項目
株式会社 東陽テクニカ 機械計測部 Magtrol 担当
〒103-8284 東京都中央区八重洲 1-1-6
TEL. 03-3279-0771 FAX. 03-3246-0645 Email: web-car@toyo.co.jp
http://www.toyo.co.jp/magtrol/
大阪支店 〒532-0003 大阪府大阪市淀川区宮原 1-6-1 (新大阪ブリックビル) TEL. 06-6399-9771 FAX. 06-6399-9781
名古屋支店 〒460-0008 愛知県名古屋市中区栄 2-3-1 (名古屋広小路ビルヂング) TEL. 052-253-6271 FAX. 052-253-6448
宇都宮営業所 〒321-0953 栃木県宇都宮市東宿郷 2-4-3 (宇都宮大塚ビル) TEL. 028-678-9117 FAX. 028-638-5380
本書に記載された商品の機能・性能は断りなく変更されることがあります。
12