


コンパクトで正確なパラレルキネマティック・ヘキサポッド
高速、コンパクト、高精度
・移動範囲 ±17 mm / ±21°。
・耐加重:5 kg
・再現性:±0.06 µm
・速度:10 mm/s
・ご要望に応じて真空対応バージョン
このカタログについて
| ドキュメント名 | 6軸小型ヘキサポッド H-811 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 429.8Kb |
| 登録カテゴリ | |
| 取り扱い企業 | ピーアイ・ジャパン株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
コピ H-811 コピ
ンエ ンエ
ポゾ ポゾ
ーア ーア
ネク
ンチ コンパクトで正確なパラレルキネマティック・ヘキサポッド ネク
ンチ
トュ トュ
エ エ
ー ー
タ タ
・ ・
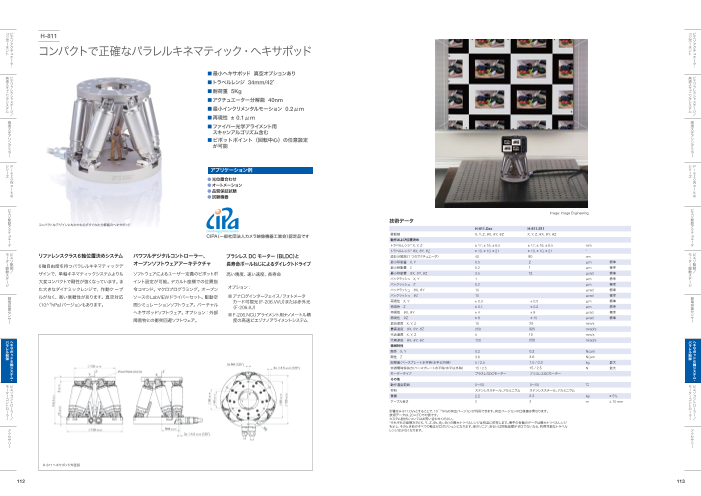
■最小ヘキサポッド 真空オプションあり
高ピ 高ピ
速エ
スゾ ■トラベルレンジ 34mm/42° 速エ
スゾ
キフ キフ
ャレ ■耐荷重 5Kg ャレ
ニク ニク
ンシ ンシ
グャ
シス ■アクチュエーター分解能 40nm グャ
シス
ステ ステ
テー
ムジ ■最小インクリメンタルモーション 0.2μm テー
ムジ
/ ■再現性 ± μ /
0.1 m
高 高
速
ス ■ファイバー光学アライメント用 速
テ スキャンアルゴリズム含む ス
テ
ア ア
リ
ン ■ピボットポイント(回転中心)の任意設定 リ
ン
グ
ミ が可能 グ
ミ
ラ ラ
ー ー
シP シP
リi
ーe アプリケーション例 リi
ーe
ズz z
o ●光位置合わせ ズo
W
a ●オートメーション W
a
l
k ●品質保証試験 l
k
●試験機器
ピ ピ
エ Image: Image Engineering エ
ゾ ゾ
駆
動 技術データ 駆
ア コンパクトなデザインにもかかわらずすぐれた分解能のヘキサポッド 動
ク H-811.Dxx H-811.S11 ア
ク
チ
ュ CIPA(一般社団法人カメラ映像機器工業会)認定品です 駆動軸 X, Y, Z, θX,θY, θZ X, Y, Z, θX,θY, θZ チ
ュ
エ 動作および位置決め エ
ー ー
タ トラベルレンジ* X, Y, Z ± 17, ± 16, ± 6.5 ± 17, ± 16, ± 6.5 mm タ
トラベルレンジ*θX,θY, θZ ± 10, ± 10, ± 21 ± 10, ± 10, ± 21 °
モピ
ーエ リファレンスクラス6軸位置決めシステム パワフルデジタルコントローラー、 ブラシレス DC モーター(BLDC)と 設計分解能(1つのアクチュエータ) 40 80 nm モピ
ーエ
タゾ オープンソフトウェアアーキテクチャ 長寿命ボールねじによるダイレクトドライブ 最小移動量 X, Y 0.5 2 μm 標準 タゾ
ー駆
駆動 6軸自由度を持つパラレルキネマティックデ ー駆
最小移動量 Z 0.2 1 μm 標準 駆動
動/
ス ザインで、単軸キネマティックシステムよりも ソフトウェアによるユーザー定義のピボットポ 高い精度、速い速度、長寿命 最小移動量 θX,θY, θZ 3.5 12 μrad 標準 動/
ス
テ テ
ー 大変コンパクトで剛性が強くなっています。ま イント設定が可能。デカルト座標での位置指 バックラッシュ X, Y 1 μm 標準
ー
ジ バックラッシュ Z 0.2 μm 標準 ジ
た大きなダイナミックレンジで、作動ケーブ 令コマンド。マクロプログラミング。オープン オプション: バックラッシュ θX,θY 10 μrad 標準
静 ルがなく、高い信頼性があります。真空対応 ソースのLabVIEWドライバーセット。駆動空 ■アナログインターフェイス/フォトメータ バックラッシュ θZ 15 μrad 標準
静
電 再現性 X, Y ± 0.3 ± 0.5 μm 標準
-6 電
容 (10^ hPa)バージョンもあります。 間シミュレーションソフトウェア。バーチャル カード可視光(F-206.VVU)または赤外光
再現性 Z ± 0.1 ± 0.2 μm 標準 容
量 (F-206.iiU) 量
セ ヘキサポッドソフトウェア。オプション:外部 セ
ン ■F-206.NCUアライメント用ナノメートル精 再現性 θX,θY ± 4 ± 8 μrad 標準
ン
サ 障害物との衝突回避ソフトウェア。 度の高速ピエゾナノアライメントシステム 再現性 θZ ± 8 ± 15 μrad 標準 サ
ー 最高速度 ー
X, Y, Z 10 25 mm/s
最高速度 θX,θY, θZ 250 325 mrad/s
代表速度 X, Y, Z 5 10 mm/s
パヘ 代表速度 θX,θY, θZ 120 250 mrad/s パヘ
ラキ 機械特性 ラキ
レサ サ
ルポ 剛性 X, Y 0.2 0.2 N/μ レ
m ルポ
制ッ
御ド 剛性 Z 3.6 3.6 N/μm 制ッ
御ド
6
軸 耐荷重(ベースプレート水平時/水平以外時) 5 / 2.5 1.5 / 0.3 kg 最大 6
軸
シ 非通電時保持力(ベースプレート水平時/水平以外時) 15 / 2.5 15 / 2.5 N 最大 シ
ス ス
テ モータータイプ ブラスレスDCモーター ブラスレスDCモーター テ
ム ム
・ その他 ・
モピ 動作温度範囲 0~50 0~50 ℃ モピ
ーエ 材料 ステンレススチール、アルミニウム ステンレススチール、アルミニウム ーエ
タゾ タゾ
ーコ 重量 2.2 2.2 kg ± 5% ーコ
コン
ント ケーブル長さ ン
2 2 m ± 10 mm コ
ント
トロ トロ
ロー ロー
ーラ 型番をH-811.DVxとすることで、10^ -6hPaの真空バージョンが利用できます。真空バージョンの仕様値は異なります。 ーラ
ラー 技術データは、20±3℃での値です。 ラー
ー/ カスタム設計についてはお問い合わせください。 ー/
*それぞれの座標方向(X、Y、Z、θx、θy、θz)の最大トラベルレンジは相互に依存します。表中の各軸のデータは最大トラベルレンジ
を示し、そのとき他のすべての軸はゼロポジションになります。他のリニア、あるいは回転座標がゼロでないなら、利用可能なトラベル
ア レンジは少なくなります。 ア
ク ク
セ セ
サ サ
リ リ
ー ー
H-811ヘキサポッド外径図
112 113