



ドイツPI社製・6軸ヘキサポッドステージのご紹介。「パラレルキネマティック駆動でコンパクト&省スペース化が実現。従来の積み重ねモータステージとの違いについても説明します
ドイツPI社製ハイスペック6軸ステージのパンフレットが完成しました。
6軸ステージの仕様や制御、それぞれの製品の比較ができるパンフレットです。
他社にはない高性能なラインナップをぜひご覧ください!!
■応用事例のご紹介
1.ALMA望遠鏡配列⽤50のヘキサポッドシステム
2.ヘキサポッドによるモーションシミュレーション
3.メカニカルエンジニアリングツールとしてのヘキサポッド
4.オートメーション⽤ヘキサポッド
5.⾼真空下での薄層成⻑のIn-situ 調査
6.材料研究⽤⾼荷重パラレルキネマティクス
7.フォトニクスパッケージング
※詳細はカタログをダウンロードして御覧ください。
関連メディア
このカタログについて
| ドキュメント名 | 【7つの製品事例付】ドイツPI社製Hexapod(6軸ステージ)_高精度に6軸駆動で位置決め |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 2.4Mb |
| 登録カテゴリ | |
| 取り扱い企業 | ピーアイ・ジャパン株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
6自由度ヘキサポッド位置決めステージ
のご紹介
ピーアイ・ジャパン株式会社
www.pi-japan.jp info@pi-japan.jp
Page2
PI社のヘキサポッド位置決めステージ
PI社のヘキサポッドについて
PI社のヘキサポッド6軸ステージは、40年以上前から、ピエゾステージ同様に独自開発・自主生産をしてお
り、用途に合わせたカスタマイズも行っております。ピエゾ位置決め製品と同様に、ヘキサポッドでもマーケット
リーダーになります。
ヘキサポッドの主な特徴
・ 自由に定義できる仮想ピボットポイント
・ 3本の直線軸、3本の回転軸
・ 低移動質量、低慣性
・ 内臓エンコーダー:インクリメンタル、アブソリュート
・ 軸クロストークの最小化
・ 高剛性
・ 優れた再現性
・ 積み重ねステージに比べて、コンパクトスペース
・ 真空用途にも対応可能
【PIグループについて】
PI:Physik Instrumente社は、ドイツ・カールスルーエを本拠地とし1970年に創業、世界従業員は1500名
以上、子会社:16社で、50年以上にわたり精密位置決め製品に特化したモノづくりを行っています。
ピエゾステージ・アクチュエータ・モーターステージ・多軸ステージ・エアベアリング・グラナイト製品・ガントリーシステムなど
幅広い製品を提供し、半導体、計測、精密加工、顕微鏡、フォトニクス、高速通信、天体観測など多くのアプリケー
ションに利用されています。特に、ピエゾを用いた精密位置決め技術分野では、グローバル市場を常に牽引していま
す。
ピーアイ・ジャパン株式会社は、1991年に創業し、日本で精密位置決め製品の提案・販売・修理など行っていま
す。2021年2月に、岐阜県のグラナイト加工設計販売・メカ設計製作に特化した“ピー・ヂー・ダブリュー株式会社”
を子会社化し、安定したグラナイトベース、メカ設計システムも組み合わせてご提案します。
また、2022年1月に、東京 立川本社を神奈川・川崎へ移転し体制を強化しています。
ピーアイ・ジャパン株式会社 www.pi-japan.jp ピー・ヂー・ダブリュー株式会社 www.pgw.co.jp
Page3
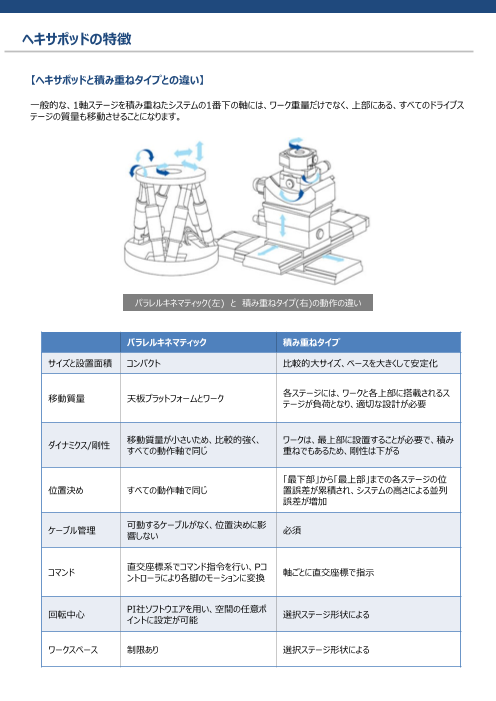
ヘキサポッドの特徴
【ヘキサポッドと積み重ねタイプとの違い】
一般的な、1軸ステージを積み重ねたシステムの1番下の軸には、ワーク重量だけでなく、上部にある、すべてのドライブス
テージの質量も移動させることになります。
パラレルキネマティック(左) と 積み重ねタイプ(右)の動作の違い
パラレルキネマティック 積み重ねタイプ
サイズと設置面積 コンパクト 比較的大サイズ、ベースを大きくして安定化
各ステージには、ワークと各上部に搭載されるス
移動質量 天板プラットフォームとワーク
テージが負荷となり、適切な設計が必要
移動質量が小さいため、比較的強く、 ワークは、最上部に設置することが必要で、積み
ダイナミクス/剛性
すべての動作軸で同じ 重ねでもあるため、剛性は下がる
「最下部」から「最上部」までの各ステージの位
位置決め すべての動作軸で同じ 置誤差が累積され、システムの高さによる並列
誤差が増加
可動するケーブルがなく、位置決めに影
ケーブル管理 必須
響しない
直交座標系でコマンド指令を行い、Pコ
コマンド 軸ごとに直交座標で指示
ントローラにより各脚のモーションに変換
PI社ソフトウエアを用い、空間の任意ポ
回転中心 選択ステージ形状による
イントに設定が可能
ワークスペース 制限あり 選択ステージ形状による
Page4
製品ラインナップ例 ※一部仕様値の省略
型式 H-811型 H-820型 H-825型
外観
寸法 上面:100mmΦ 上面:240mmΦ(変形) 上面:210mmΦ
底面:136mmΦ 底面:350mmΦ 底面:320mmΦ
高さ:114.3mm 高さ:308mm 高さ:195mm
トラベル X,Y :±17, ±16mm X,Y :±50, ±50mm X,Y :±27.5, ±25mm
レンジ Z:±6.5mm Z:±25mm Z:±14mm
θx,θy:±10,±10° θx,θy:±15°, ±15° θx,θy:±11.5,±10.5°
θZ:±21° θZ:±30° θZ:±19°
最大速度 X,Y,Z: 10mm/sec X,Y,Z: 20mm/sec ・Dタイプ
X,Y,Z: 25mm/sec
・Gタイプ
X,Y,Z: 2.5mm/sec
最小動作量 X,Y,Z: 0.2, 0.2, X,Y,Z: 5µm ・Dタイプ
0.08µm θx,θy,θz: 12.5µrad X,Y,Z: 0.2, 0.2, 0.08µm
θx,θy,θz: 2.5, 2.5,
5µrad ・Gタイプ
X,Y,Z: 0.2, 0.2, 0.08µm
最大荷重 5kg(水平時) 20kg(水平時) Dタイプ:15kg(水平時)
Gタイプ:30Kg (水平時)
自重 2.2kg 15kg 10kg
特徴 小型・高速動作 コストパフォーマンス コンパクト
インクリメンタルエンコーダ インクリメンタルエンコーダ アブソリュートエンコーダ
ブラシレスDCモータ ブラシレスDCモータ ブラシレスDCモータ
Page5
製品ラインナップ例 ※一部仕様値の省略
型式 H-840型 H-850型 H-860型
外観
寸法 上面:260mmΦ 上面:250mmΦ 上面:150mmΦ(変形)
底面:348mmΦ 底面:348mmΦ 底面:520mmΦ
高さ:320mm 高さ:328mm 高さ:317mm
トラベル X,Y :±50, ±50mm, X,Y :±50, ±50mm X, Y, Z :±7.5mm
レンジ Z:±25mm Z:±25mm θx, θy, θZ:±4°
θx,θy:±15°, θZ:±30° θx,θy:±15°, ±15°
θZ:±30°
最大速度 ・Dタイプ ・Hタイプ X,Y,Z: 250mm/sec
X,Y,Z: 60mm/sec X,Y,Z: 0.5mm/sec
・Gタイプ ・Gタイプ
X,Y,Z: 2.5mm/sec X,Y,Z: 8mm/sec
最小動作量 ・Dタイプ ・Hタイプ X,Y,Z: 1 µm
X,Y,Z: 0.5, 0.5, X,Y,Z: 0.3, 0.3, 0.2µm
0.25µm
・Gタイプ
・Gタイプ X,Y,Z: 1, 1, 0.5µm
X,Y,Z: 0.25, 0.25,
0.15µm
最大荷重 Dタイプ:40kg(水平時) ・Hタイプ: 250kg(水平時) 1kg(水平時)
Gタイプ:10Kg (水平時) ・Gタイプ: 50kg(水平時)
自重 12kg 17kg 30kg
特徴 高速動作 高耐荷重 ボイスコイルモータ
アブソリュートエンコーダ アブソリュートエンコーダ アブソリュートリニアエンコーダ
インクリメンタルエンコーダ ブラシレスDCモータ
ブラシレスDCモータ
Page6
ヘキサポッド
【動作概要】
PI社製ヘキサポッドは、動作する天板を、6本のアクチュエータで支え動かしています。アクチュエータは、用途によって異
なりますが、多くはDCサーボモータになります。内部には、インクリメンタルセンサーやアブソリュートセンサーがあり、個々の
位置を認識し、高性能コントローラによって高速制御されています。6本の脚は、パラレル制御で非常にスムーズな動作
が可能です。フライトシミュレータやドライブシミュレータで知られる油圧式タイプよりもはるかに高い位置決めです。
PI社のヘキサポッドは、多くの製品群があり、ダイレクト駆動式は高速動作向き、ギア駆動式では、高耐荷重になり、
耐荷重、動作速度などのご要望に沿った製品をよってます。ご要望の用途・環境によっては、ピエゾ駆動式アクチュエー
タ、ステッピングモータタイプなどご提案しております。
真空対応製品の場合は、真空&大気ケーブル、フィードスルーなども用意しております。
【ワークスペース】
ヘキサポッドが、任意の位置から実動作できる平行方向、および
回転方向の組み合わせすべてを総称してワークスペースと言い、
使用する座標系の原点を基準として指定します。ワークスペース
は、障害物や搭載物の寸法および位置などの外的要因により制
限されます。 さまざまなヘキサポッドワークスペースのシミュレーション
【ジョイント】
多くの高精度ポジショニング用ヘキサポッドは、2つの軸が直交配置
されたカルダンジョイントを備えています。これは、2つの自由度と構
造の剛性を最適に組み合わせたものです。
【高度なモーションコントロール】
ヘキサポッドの各ドライブアクチュエータは、必ずしも移動方向を向い
ているわけではないため、リアルタイムに必要な座標変換を処理でき
る高性能なコントローラが必要になります。
弊社では、ユーザーフレンドリーなソフトウェアを備えた高性能デジタ
ルコントローラーを用意しています。モーションコマンドはすべて直交
座標で指定し、各アクチュエータに対する座標変換はすべてコント
ローラ内部で行われます。
H-824型ヘキサポッドのZ軸動作(25mm動作量)の位置決
めは、数マイクロメートルであり、再現性は±0.1 µmより小さい
オートメーションでのヘキサポッド:
【統合を容易にする制御装置とインターフェイス】
・ ジャーク制限による高精度パス制御
速度および加速度を定義した複雑な軌道に基づいて動作が可能
・ ユーザー定義の座標系
ワークピースまたはツールの位置などを参照する座標系を任意定義可能
・ EtherCATインターフェイス
フィールドバスインターフェイスにより親PLCまたはCNC制御装置に接続
でき、オートメーションラインの別のコンポーネントと同期動作が可能
座標系は任意に定義が可能
Page7
応用事例のご紹介
【ALMA電波望遠鏡のヘキサポッドシステム】
ALMA天文台の50基のアンテナは、PI社の高精度ヘキサポッドを使用して
います。アタカマ砂漠の過酷な環境条件の下、電波望遠鏡の副反射鏡を
高精度に位置合わせするため採用されました。
副反射鏡の背面に6自由度を持つヘキサポッドシステムが設置され、サブ
ミクロン秒角の分解能で位置決めをすることができます。低気圧、最大
50 度の温度差、強風、埃、雨、海抜5000メートルという過酷な環境条
件に適合し、高剛性で頑丈なジョイントをALMA向けヘキサポッド用に開発
しました。このヘキサポッドは、数ミリメートルまで高い精度で副反射鏡の位
置を調節することができます。
ALMA望遠鏡の副反射鏡でPIのヘキサポッドを設置するエンジニア
【ヘキサポッドによるモーションシミュレーション】
加振機としてのヘキサポッドは、耐振動性を評価するために使用されます。
例えば、手振れ補正の機能を持つスマートフォンや携帯電話、カメラなどに
使われ、加速度センサやジャイロセンサを持つデバイスの評価です。
H-811型とH-840型ヘキサポッドは、CIPA(一般社団法人カメラ映像機
器工業会)基準に従って画像安定化システムを試験するためにカメラのぶ
れをシミュレーションします。PI社は、画像77用途として、ヘキサポッドを提供
しています。
Image Engineeringから提供されているテスト設備
(画像: Image Engineering)
【メカニカルエンジニアリングツールとしてのヘキサポッド】
メカニカルエンジニアリングの位置決めタスクに、ヘキサポッドを利用
することができます。利用分野としては、電子部品生産現場での精
密なハンドリングシステムや、穴あけやミリングの精密機械加工機の
ツールやワークの制御、車、航空機、重機の取り付け作業が挙げら
れます。 ヘキサポッドは、任意に回転中心を変更可能なため、
ワークを切り替えても、ヘキサポッドはそのままで仕事を続けることが
できます。
Page8
応用事例のご紹介
【オートメーション用ヘキサポッド】
Dymaco Groupの寸法計測装置DM401シリーズ:自動
車のヘッドランプ向けインライン自動寸法計測用にPI社のヘキ
サポッドが採用されています。ランプのCADデータに基づき規定
測定ポイントが決定、ランプは生産ラインから抜き取られ、検
査装置内の位置決めシステム上に配置されます。測定はキャ
リブレ―ションデータに従い自動完了、測定対象は決められた
配置に調整されます。位置決め作業は非常に迅速かつミクロ
ンレンジの高精度、高スループット率が必要です。
ヘキサポッドを使用することにより、モーションロボティクスに必
要な空間が最小化され、インライン式オートメーションにおける
幅広い事例に対応できる優れた柔軟性が提供可能です。
3次元測定器DM401シリーズは、ヘッドランプの位置決めに
H-820ヘキサポッドを採用 (画像: Dymaco Group)
【非接触・非球面計測】
非球面レンズは、従来のレンズに比べて高性能で、小型化の重要
な特長である小型化、質量、素子数の削減が可能です。医療機
器、望遠鏡、カメラのメーカーは、非球面レンズの製造と計測には、
従来のレンズと比較してより複雑で革新的な技術が必要です。
「傾斜波面干渉法(TWI)」による非接触計測は、ヘキサポッドシス
テムの多軸動作の柔軟性と精度を利用して、キャリブレーション球を
配置します。高分解能な横軸動作にて表面形状を測定することが
でき、個々の干渉パターンを組み合わせて、単一パターンを形成しま
す。キャリブレーション球で有意義なデータ取得を可能にするには、
0.5μm以下のの再現性と、5μm以下の横方向の位置決めが可
能なシステムが必要です。
【材料研究用高荷重ヘキサポッド】
ビームラインの高エネルギーX線により、溶接の継ぎ目の確認、加
工物の疲労状況など、材料研究の可能性が広げます。 これには
マイクロメータ精度で重量物の位置決めをする必要があり、ドイツ・
ハンブルグにあるPETRA IIIストレージリングはその一例です。
最大1トンの高荷重容量があるヘキサポッドにより設備全体を
400 mmのストロークで±1 µmの精度で位置決めすることがで
きます。設備にはシリンダーブロック、タービン、焼結炉、低温チャン
バー、溶接装置、加工ツールが含まれます。
PETRA IIIのP07ビームラインのEH3実験装備にあるヘキサポッド
(画像: PI / Helmholtz-Zentrum Geesthacht)
Page9
応用事例のご紹介
【フォトニクスアライメント・パッケージング】
大容量化、高速化を求める世界のデータ需要を満たす上でシリコンフォトニクス(SiP)は不可欠な技術です。PI社
のオートメーションサブシステムにより、SiP製品のメーカーは、必要なナノスケールの精度と高い生産スループットを維持
しながら、優れたコスト効率と信頼性で新世代のフォトニクスデバイスのテストおよびパッケージングを実現しています。
シリコン ウエハ上の導波路の直径は150~200 nmであり、コア径が9 µm の光ファイバーと比較するとはるかにデリ
ケートです。(50 倍の大きさ)また、市場に供給するには最速の生産速度が必要とされ、ハンドリング、位置決め、ア
ライメントには最高の精度が要求されます。 PI社は、SiP製品の重要な平面テストからパッケージング工程に必要とな
る、高速、平行、ナノレベルの精度、マルチ光学アライメント等の最適化に取り組んでいます。 この画期的なシステム
には、高速ピエゾナノポジショニングテクノロジーと斬新なアルゴリズムで制御された超高精度モーションコントロールがイン
テグレーションされています。
PI社の“Fast Multi-Channel Photonics Alignment Engines” (FMPA)
“高速マルチチャンネルフォトニクスアライメントエンジン”技術は、ピエゾナノポジショニング、およびヘキサポッ
ドコントローラに組み込まれたファームウェアレベルのコマンドのセットです。
この技術の鍵は、光の強度をコントローラに取込み、複数の入出力と自由度の同時高速アライメントを自動化し、最
適化を通常わずか数百ミリ秒で完了するPI社独自の機能です。並列処理により、テストおよびパッケージングにおいて
マルチチャネルSiPコンポーネントのポジショニングに必要だった時間のかかる反復的アプローチが不要になり、2桁を超え
る時間短縮が可能になります。またモジュール型アーキテクチャを採用しているため、デバイスおよび生産アプリケーション
によって要件の異なるあらゆる生産テストおよびパッケージングのニーズに応えられます。
サイン波アライメントスキャン グラディエントサーチによる高速ピーク検出
高速ピエゾXYZ軸ステージを備えた 高速ピエゾXYZ軸ステージを備 XYZ軸ピエゾスキャナー:
ヘキサポッドダブルサイドシステム えたヘキサポッドシステム ストローク100µm
Page10
モーションコントロールソフトウエア
すべてのPIコントローラには、拡張ソフトウェアパッケージ、“PISoftwareSuite”が付属しています。この付属のユーザープ
ログラムを使用して、ユーザーはシステム全体を設定しパラメーター化することができます。モーションコマンドの実行と追加
の最適化のために、追加のプログラミングを行う必要ありません。直感的に操作可能なユーザインターフェイス、グラフィック
の視覚化、そしてシンプルなオートメーション機能により、迅速な導入とトラブルのない使用がサポートされます。
【PIMikroMove】
PIMikroMoveは、すべてのコントローラと対話するための主要
なソフトウェアです。さまざまなタスクをこのツールで処理すること
ができます。
駆動原理や軸の数、構成に関係なく、PIのすべて位置決め
装置をPIMikroMoveで明確かつ快適に制御します。接続済
みのコントローラと軸はすべて同一の視覚的なインターフェースに
表示されます。複数の軸をさまざまなコントローラで制御し、同
一のウィンドウからPIMikroMoveでコマンドを実行することがで
きます。ポジションパッドを使用すると、ベクトル移動においても、
マウスやジョイスティックを使用して2つ以上の独立した軸の動き
を制御できます。
PIMikroMoveでの高速アライメントのサポート
【データレコーダー】
PIMikroMoveに統合されているため、データレコーダは測定
データを分析するための簡単な操作ツールとなっています。さ
まざまなデータソースのデータを時間の関数として表示しなが
ら保存し、高速な視覚化を実現します。
すべてのコントローラが内部データストレージを備えています。
そのため、非常に高速な操作でも正確なストレージが可能で
す。データソースとトリガタイプは、PIMikroMoveのデータレ
コーダウィンドウで簡単に設定および選択することができます。
PIMikroMoveのデータレコーダー
【ファンクションジェネレーターとウェーブジェネレーター】
ウェーブジェネレータを使用することで、多くのコントローラは、位置情報を内部テーブルに保存し、その値を1度またはリア
ルタイムで周期的に実行することができます。ウェーブジェネレーターでは、サイン波、傾斜、のこぎり波などの事前定義され
た波形だけでなく、ユーザーが定義した軌道点を指定することもできます。使用例には、ダイナミック動作分析、スキャン、
撹拌機などの用途があります。
【プログラミングサポート】
お客様が独自のプログラムを作成してPIコントローラーをアプリケーションにシームレスに統合することができます。そのために、
カプセル化された関数呼び出しの形でコントローラにアクセスできるさまざまなライブラリやドライバが利用できます。コント
ローラとの接続や通信は、コントローラの通信インターフェイスとは関係なく、簡単に設定できます。
コントローラの総合的なソフトウェアパッケージPI Software Suiteには、一般的なプログラミング言語およびプログラム
用の次のライブラリとドライバが用意されています:
・C, C++, C# ・Python ・MatLab ・NI LabVIEW
Visual Basic (VB)やDelphiなどのあまり一般的ではないプログラミング言語についてはお問い合わせください。コントローラに
よっては利用できない機能があります。
Page11
シミュレーション & エミュレーション
【PIVirtualMove】(HexapodSimulationToolの後継です)
ヘキサポッドの動作検証とワークスペース計算プログラム
複雑な多軸メカニクスでは、個々の軸の範囲にあるすべてのポイン
トに到達できるわけではありません。パラレルキネマティックのワーク
スペースの限界は、現在位置、取り付け方向、モーションプラット
フォームに作用する力、およびトルクによって異なります。そのため、
システム選択時には、ポイントの到達可能性を確保する必要があ
ります。 以下をサポートします:
・ 取り付け位置と負荷による位置の到達可能性の検証
・ 座標系、ピボットポイント、取り付け位置、荷重を自由に設定
・ データベースからのメカニクス選択
・ コントローラ等接続なしに単独でソフトウェアを操作が可能
【PIVeriMove】
空間に制限があると、モーションおよびポジショニングシステム、モーションプラットフォームとその周辺のセットアップの両
方で問題が発生する可能性があります。実験段階のセットアップや本稼働ユニットの設計時によく注意したとしても、
常に衝突のリスクを回避できるとは限りません。PIVeriMoveソフトウェアは、オフライン衝突検出を使用して、動作
範囲が妨害された場合のヘキサポッドの許容移動範囲を計算します。これは、サンプルセットアップまたは真空チャ
ンバの壁が原因で発生する可能性があります。
ソフトウェアで新しく作成された設定は、幾何学計算のベースと
してヘキサポッドコントローラに送信できます。動作中および各動
作コマンドまたは位置コマンドの前に、オブジェクトに対する安全
ギャップがチェックされます。衝突が差し迫っている場合は、モーショ
ンは実行されません。安全性を高めるために、空間内の方向に関
係なく距離に加算される最小ギャップを指定できます。プラット
フォームの回転の基準点であるピボットポイントは、いつでも変更
可能です。
※衝突検出機能を使用するには、追加のライセンスが必要です。こ
の機能はC-887でのみ使用できます
衝突の表現(赤色の領域)
【PIHexapodEmulator】
・ C-887のヘキサポッドコントローラ、接続されたヘキサポッド、および2つの追加軸をエミュレートできるプログラム
・ 実際のヘキサポッドコントローラが使用できない場合でも、GCSコマンド入力でヘキサポッドシステムの動作をテスト
・ シミュレートされたヘキサポッドシステムは、PIMikroMoveまたは任意のTCP/IP接続を介して動作可能
※これらのツールを使用するには、QEMU 2.12.0のインストールが必要です。
Page12
お問合せ:
ピーアイ・ジャパン株式会社
212-0013 神奈川県川崎市幸区堀川町580番地 ソリッドスクエア西館17F
TEL: 044-280-7676
info@pi-japan.jp
www.pi-japan.jp
*本冊子の情報は、2023/9/1現在のものです。仕様は予告なく変更される可能性があります。
BROJP_HEXA_2023.001