


ロボットとビジョンシステムを使った工場等の自動化に関するお役立ち情報をまとめました。
⑴マシンビジョンのカメラ選定の基本
①イメージセンサー(撮像素子)
②フレームレート
③シャッタースピード
④波長域
⑤3Dビジョンと2Dビジョン
⑥撮像方式
⑦シャッター方式
⑧ハウジング(筐体)
⑵ロボットビジョンとは?
①ロボットビジョンとは?
②2Dビジョンと3Dビジョンの比較
③3Dのロボットビジョンを実現する技術
④3Dのロボットビジョンの活用事例
⑶ビンピッキングとは?
①ビンピッキング(バラ積みピッキング)とは?
②ビンピッキングを自動化するメリット・デメリット
③ビンピッキングの自動化ポイント
④ビンピッキングの自動化例
⑷産業用カメラを用いた画像認識
①産業用カメラを使った画像認識とは
②工場での画像認識例1:産業用カメラでの外観検査
③工場での画像認識例2:産業用カメラでの位置決め
④画像認識をうまく運用するための注意点
⑸ロボットによる検査工程の自動化
①検査工程の重要性と課題
②ロボットで検査工程を自動化するメリット
③ロボットによる検査工程の自動化の課題
④検査工程の自動化を実現する画像認識技術
⑤検査工程の具体的な自動化例
このカタログについて
| ドキュメント名 | ロボット導入・自動化お役立ち情報 ビジョン編 |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 6.3Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社JRC(ALFIS) (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ロボット導入
自動化
お役立ち情報 ビジョン編
06-6543-8180
〒 550-0011 大阪市西区阿波座2丁目1番1号 CAMCO西本町ビル5階
Page2
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
マシンビジョンのカメラ選定の基本
カメラ選定の際に基準となるパーツやスペックをご紹介
ロボットビジョンの導入で重要になってくるのは、カメラの選定です。
高機能なものを選んでも使わない機能が多く、不要な費用を使ってしまう事になります。
逆に安価なものを選ぶと現場に必要な機能が備わってない可能性もあります。
カメラの選定は、導入する現場にあったスペックのものを選ぶことが大切です。
本記事では、カメラ選定の基準となるパーツやスペックをご紹介いたします。
ロボットビジョン導入時のカメラ選びの際にお役立てください。
1 イメージセンサー(撮像素子) 撮影速度が向上しますが、1秒当たりの撮影
枚数が増えるのでデータ量も大きくなりま
イメージセンサーとは、光の強弱を電気信 す。
号に変換するセンサーで、人間でいうところ フレームレートは速いほど良いというわけ
の「目」にあたります。 ではなく、撮影対象物に動きがなければ、低
「画素数」や「ピクセル」と表記されるこ 速のもので十分です。
とが多く、その数値が大きければ大きいほど フレームレートの幅は、10fps(低速)か
取り込む画像は綺麗になりますが、その分コ ら 340fps(高速)まで幅広く存在するため、
ストは高くなってしまいます。そのため現場 カメラで捉える搬入物の速度など状況に合わ
に合わせて必要なスペックのものを選ぶこと せてあったものを選定しましょう。
が大切です。
またセンサーも大きく分けて「CCD セン 3 シャッタースピード
サー」と「CMOSセンサー」の 2種類があり
ます。どちらもセンサーでとらえた光の強度 シャッタースピードとは、光を取り込む時
や色を電気信号に変える働きをしますが、電 間のことで、「1/30 秒」や「1/1000 秒」と
荷の処理方法が異なります。元々は「CCD いうように記載されます。この数値が短いほ
センサー」が主流でしたが、「CMOSセンサー」 ど、被写体に対してブレなく撮影を行うこと
の性能向上に伴い、近年は「CMOSセンサー」 が出来ます。
が主流になってきています。 逆に長ければ長いほどシャッターを開き、
光を取り込む時間が長くなるためブレが発生
2 フレームレート しやすくなります。しかし夜間や暗所など光
が少ない場所で使用する際は、光を多く取り
フレームレートとは、1秒当たりに撮影で 込む必要があるので、シャッタースピードが
きるフレーム数を示しており、「fps」という 遅い方が綺麗に撮影することができます。
単位で記載されます。この数値が大きいほど
1
Page3
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
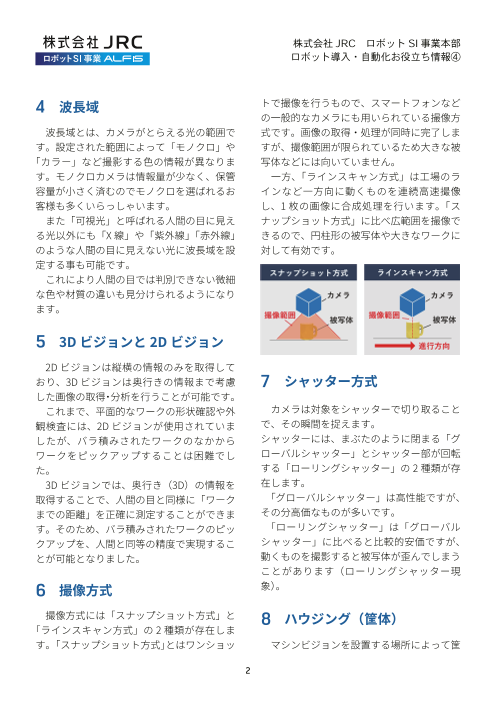
4 波長域 トで撮像を行うもので、スマートフォンなど
の一般的なカメラにも用いられている撮像方
波長域とは、カメラがとらえる光の範囲で 式です。画像の取得・処理が同時に完了しま
す。設定された範囲によって「モノクロ」や すが、撮像範囲が限られているため大きな被
「カラー」など撮影する色の情報が異なりま 写体などには向いていません。
す。モノクロカメラは情報量が少なく、保管 一方、「ラインスキャン方式」は工場のラ
容量が小さく済むのでモノクロを選ばれるお インなど一方向に動くものを連続高速撮像
客様も多くいらっしゃいます。 し、1枚の画像に合成処理を行います。「ス
また「可視光」と呼ばれる人間の目に見え ナップショット方式」に比べ広範囲を撮像で
る光以外にも「X線」や「紫外線」「赤外線」 きるので、円柱形の被写体や大きなワークに
のような人間の目に見えない光に波長域を設 対して有効です。
定する事も可能です。
これにより人間の目では判別できない微細
な色や材質の違いも見分けられるようになり
ます。
5 3D ビジョンと 2Dビジョン
2D ビジョンは縦横の情報のみを取得して
おり、3D ビジョンは奥行きの情報まで考慮 7 シャッター方式
した画像の取得・分析を行うことが可能です。
これまで、平面的なワークの形状確認や外 カメラは対象をシャッターで切り取ること
観検査には、2D ビジョンが使用されていま で、その瞬間を捉えます。
したが、バラ積みされたワークのなかから シャッターには、まぶたのように閉まる「グ
ワークをピックアップすることは困難でし ローバルシャッター」とシャッター部が回転
た。 する「ローリングシャッター」の 2種類が存
3Dビジョンでは、奥行き(3D)の情報を 在します。
取得することで、人間の目と同様に「ワーク 「グローバルシャッター」は高性能ですが、
までの距離」を正確に測定することができま その分高価なものが多いです。
す。そのため、バラ積みされたワークのピッ 「ローリングシャッター」は「グローバル
クアップを、人間と同等の精度で実現するこ シャッター」に比べると比較的安価ですが、
とが可能となりました。 動くものを撮影すると被写体が歪んでしまう
ことがあります(ローリングシャッター現
6 撮像方式 象)。
撮像方式には「スナップショット方式」と 8 ハウジング(筐体)
「ラインスキャン方式」の 2種類が存在しま
す。「スナップショット方式」とはワンショッ マシンビジョンを設置する場所によって筐
2
Page4
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
体の選定が重要になる場合もございます。生
産ラインの装置内など狭い場所に設置する際
は、コンパクトサイズの筐体が求められます。
コンパクトサイズの場合は、中のパーツも小
さな筐体に収まるものを選定する必要が発生
してきます。
また現場によっては防爆性、防湿性、防水
性等が求められる場合もございます。
その場合は IP コードを確認の上、筐体を選
定する必要があります。
IP コードとは「外来固形物(異物)」と「水」
の侵入に対する保護性能(防じん・防水性能)
を表す規格です。
3
Page5
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
ロボットビジョンとは?
2D・3Dロボットビジョンと活用事例
これまで産業用ロボットは「決められたワーク」が「決められた位置」にないと扱うことが難
しく、人間のような柔軟な作業は苦手とされてきました。そこでロボットの活用範囲を広げる
ため、開発や導入が進んでいるのが「ロボットビジョン」です。
この記事では、ロボットビジョンの概要や、3D ロボットビジョンを実現する技術、その活用事
例を紹介します。
1 ロボットビジョンとは? おり、3D ビジョンは奥行きの情報まで考慮
した画像の取得・分析を行うことが可能です。
ロボットビジョンは「マシンビジョン」と これまで、平面的なワークの形状確認や外
もよばれ、産業用ロボットと組み合わせて使 観検査には、2D ビジョンが使用されていま
用されるカメラシステムの総称です。ワーク したが、バラ積みされたワークのなかから
の位置や向きの検出、外観検査に使われてお ワークをピックアップすることは困難でし
り、人間でいう「目」の役割を担います。 た。
例えば、ばら積みされたワークの整列工程 3D ビジョンでは、奥行き(3D)の情報を
や、ひとつひとつ形が異なる製品のピック 取得することで、人間の目と同様に「ワーク
アップでは、ロボットビジョンによるワーク までの距離」を正確に測定することができま
認識が重要となります。また、ロボットビジョ す。そのため、バラ積みされたワークのピッ
ンで取得した情報を活用することで、作業中 クアップを、人間と同等の精度で実現するこ
の不良品を除外することも可能です。 とが可能となりました。
ロボットビジョンは主に、周辺の状況を画
像や動画として取得する「センサ(カメラ)」 3 3D のロボットビジョンを実
と、その情報を処理する「画像処理システム」 現する技術
で構成されています。ロボットビジョンで取
得・分析した情報に基づいてロボットを動か 3D のロボットビジョンを実現するために
すことで、精度の高い作業が実現します。 は、「3D カメラ」と「ディープラーニング」
などの AI を用いた画像認識技術が不可欠で
2 2D ビジョンと 3D ビジョン す。
の比較 3Dカメラ(3Dセンサ)
ロボットビジョンは主に、「2D ビジョン」 3D ビジョンで用いられる縦・横・奥行き
と「3D ビジョン」に分類できます。 の三次元情報は、3D カメラによって取得さ
2D ビジョンは縦横の情報のみを取得して れます。
4
Page6
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
3D カメラの方式は、主に「ステレオ方式」 通常、「複雑な形状のワーク」や「不規則
と「ToF 方式」があります。 な位置のワーク」を扱うためには、時間をか
・ステレオ方式 けて学習を行う必要があります。その時間を
ステレオ方式は、複数のカメラで撮影した 大幅に短縮するのが、AI(ディープラーニン
画像を組み合わせることで、奥行きの情報 グ)です。
を取得します。人間が「二つの眼」によっ AI による画像認識では、3D カメラで撮影
て、立体的にものを捉えるのとおなじ考え した複数のワークの画像を、ディープラーニ
方です。 ングを用いたアルゴリズムに読み込ませるこ
カメラからワークまでの距離は、カメラど とで、ワークの位置や向きを推定することが
うしの距離、カメラの焦点距離、視差(左 できるようになります。
右のカメラによる見える方向の違い)によ ディープラーニングは「深層学習」とも
って算出されます。これにより、人間の目 よばれ、人間の脳神経回路をモデル化した
と同等以上の情報を取得できるため、安定 ニューラルネットワークを用いた機械学習手
した作業が可能です。 法です。従来の機械学習では、学習を行うた
一方で、ステレオ方式で正確に奥行きの情 めに必要な情報を人間が与える必要がありま
報を取得するためには、校正作業が不可欠 したが、ディープラーニングでは、情報をア
です。校正はカメラ位置を変更しながら行 ルゴリズム自体が与えられたデータから抽出
うため、製造ラインに組み込まれた状態で します。学習を自動で繰り返し行うことで、
は、校正が難しい場合もあります。 精度を高めていくことが可能です。
・ToF 方式 デ ィープラーニングは、画像認識を中心に
ToF は、光の飛行時間(Time of Flight)か 音声認識や自然言語処理、設備の異常検知な
ら距離、奥行きを算出する方式です。 ど、私たちの日常生活に近い内容も含め、幅
ToF 方式のカメラは、光源とセットになっ 広い領域で活用されています。
ており、光源から照射した光が物体に反射
しカメラに戻ってくるまでの時間をもとに 4 3D のロボットビジョンの
距離を算出しています。光源には、パルス 活用事例
光が用いられる場合と、連続光が用いられ
る場合があります。 3D のロボットビジョンが活用されている
ToF 方式は撮影可能な距離が長く、低コス 事例を紹介します。
トで導入できることから、物流分野のピッ 複雑なワークのビンピッキング
キングロボットなどに多く採用されていま
す。 複雑な形のワークは形状の特定が難しく、
一方で太陽光があたる場所では、物体に反 それらがバラ積みされている場合は、周辺の
射した光を正確に検出できないため、屋外 ワークに影響を与えないようにピッキングを
で使用する可能性がある場合には不向きで する必要があります。
す。 このような作業を自動化するためには、こ
AI による画像認識(ディープラーニング) れまで時間をかけてトレーニングを行う必要
がありました。しかし、AI を搭載した 3D ロ
5
Page7
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
ボットビジョンを用いることで、大幅にト
レーニング時間を短縮することが可能です。
変形文字を高速で認識し分類
ペットボトルなど、曲面に印字された文字
は変形しており、通常の画像認識では精度を
発揮することができませんでした。
3D ロボットビジョンを活用することで、
高い精度で文字を高速認識できるようにな
り、複数のワークを同時に認識しながら、検
査や分類を行うことが可能です。
混載された箱のパレタイズ
異なる種類の箱が混載されているデパレタ
イズでは、箱の種類や位置・向きを正確に把
握する必要があります。
3D ロボットビジョンを活用することで、
奥行きの情報が把握できるため、箱の位置や
大きさを推定し、適切なピッキングすること
が可能です。作業の正確性と速度向上に大き
く貢献します。
6
Page8
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
ビンピッキングとは?
ビンピッキング自動化のポイントを解説
製造業では既にさまざまな作業が自動化されていますが、従来の産業用ロボットではまだまだ
自動化が難しい作業があります。そのひとつが「ビンピッキング」と呼ばれるピッキング作業
です。自動化が進んだ工場でもビンピッキングは人手で行うことも多く、自動化の課題となっ
ています。
この記事では、ビンピッキングを自動化するメリットや、ビンピッキングの自動化ポイントに
ついて解説します。
1 ビンピッキング ビンピッキングを自動化するにあたり、メ
(バラ積みピッキング)とは? リット・デメリットを紹介します。
ビンピッキング(バラ積みピッキング)は、 ビンピッキング自動化のメリット
容器のなかにバラバラに置かれたワークの山 作業者によるビンピッキングを自動化する
から、つかむのに適切なものを選択し、つか ことで、省人化が期待できます。自動化によっ
む作業をさします。 て手の空いた人員を、他の作業に配分にでき
作業者がビンピッキングをする場合、つか る点も大きなメリットです。
みたいワークの位置や向き、周辺の状況を同 また、小さくて壊れやすいワークを扱う場
時に確認し、他のワークを傷つけないように 合は集中力が必要で、大きくて重いワークを
注意しながらワークをつかみます。これらの 扱う場合には体力が必要です。どちらの作業
作業は人であれば無意識に行うことができま も長時間続けることは大変で、自動化によっ
すが、ロボットであれば高度な技術が要求さ て作業者の負担軽減につながります。
れます。 さらに、複数種類のワークが混在している
さまざまな業界で人手不足が深刻になって ビンピッキングでは、人が作業をする場合、
おり自動化が進められていますが、ビンピッ ミスが発生してしまうことがあります。ロ
キングは自動化がむずかしい作業のひとつで ボットによるビンピッキングの自動化は、品
す。「整列されていない状態」「ワーク形状や 質の向上にもつながります。
向きの把握」「周囲のワークに干渉しない」
などの要素が、ロボットによる自動化を難し ビンピッキング自動化のデメリット
くしています。 専用の自動化設備を導入する際は、初期費
用やメンテナンス費用が必要になり、導入す
2 ビンピッキングを自動化する るシステムによっては高額なコストがかかり
メリット・デメリット ます。
近年は汎用性の高いロボットの開発が進ん
7
Page9
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
でおり、メンテナンスも容易になっているも 様々なワークに対応できるか?
のもあるので、選定の際には、これらのロボッ
トで自動化を検討することが重要です。 複数のラインでビンピッキングを自動化す
る場合は、導入するロボットやロボットハン
3 ビンピッキングの自動化ポイ ドがさまざまなワークに対応できるかが重要
ント なポイントとなります。
ロボットごとに扱えるワークが異なると、
ビンピッキングの自動化を進める際に、考 ライン変更があった時に、柔軟なロボットの
慮すべきポイントを解説します。 配置転換ができません。
前工程不要でビンピッキングができるか? ワークに合わせたロボットハンドの設計がで
ロボットがピッキングしやすいように、前 きるか?
工程で整列などの軽作業が発生すると、完全 ワークのなかには、規格品のロボットハン
な自動化につながりません。作業者による前 ドでは対応が難しいものもあります。
工程不要で、ビンピッキングができるロボッ 特に食品業界では、やわらかいものやひと
トを導入する必要があります。 つずつ形が異なるものがあるため、ワークに
バラ積み状態のワークを正しく認識するた あわせたロボットハンドを設計できるかどう
めには、人間の目の役割を持つ「3D ビジョ かも、あらかじめ確認しておくことが必要で
ンセンサー」が必要です。撮影した画像を処 す。
理することで、つかみたいワークの形状や位 周辺機器とスムーズに連携出来るか?
置、姿勢などを認識し、周囲のワークに悪影
響を与えないよう、最適なつかみ方を判断し 既に他のロボットや生産システムが導入さ
ます。 れている場合、周辺設備とスムーズに連携で
ワーク変更時の段取り替えは効率的か? きるかが求められます。
現場にあわせた最適なシステムの選定は、
通常、複数種類のワークを同一のロボット 導入後の運用に大きく影響するため、重要な
で扱う場合、ワークごとにロボットハンドの ポイントのひとつです。
交換やプログラミングの再調整が必要です。
しかし、多品種少量生産や混載のビンピッキ 4 ビンピッキングの自動化例
ングを行う際は、非効率です。
そこで、複数のワークを扱えるロボットハ 作業者の負荷軽減や生産性向上を実現す
ンドや、段取り替えをスムーズに行えるシス る、ビンピッキングの自動化例を紹介します。
テムが搭載されていいるかが、自動化を行う 重量物のビンピッキングの自動化
際にの重要なポイントのひとつです。段取り
替えの回数を最低限に抑え、一回あたりの段 バラ積み状態の重量物を、別の場所へ整列
取り替え時間を短縮することで大きな効率化 させる作業を自動化。
につなげることができます。 ビジョンセンサでワークの位置や姿勢を認
識し、自動で取り出せるロボットアームを導
8
Page10
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
入することで、作業者の負荷軽減を実現しま
す。
作業者の疲労による供給ペースの低下もな
くなり、生産性の向上にもつながります。
食品工場のビンピッキングの自動化
バラ積み状態の青果を、きれいに整列させ
る作業を自動化。
ビジョンセンサで青果の形状を把握し、自
動で次工程へ送る協働ロボットを導入するこ
とで、作業者の負荷軽減を実現します。
やわらかい材質のロボットハンドを採用す
ることで、青果を傷つけることもありません。
9
Page11
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
産業用カメラを用いた画像認識
産業ロボットの制御と画像認識の活用について解説
製造工程の自動化において、産業用カメラの導入が必要不可欠となっています。
産業用カメラを使った画像認識は製造工程の自動化においてとても重要な役割を果たしていま
す。今回の記事では、この画像認識が製品工程において用いられている作業や上手く活用する
ための注意点などをご紹介していきます。
1 産業用カメラを使った画像認 す。
識とは ここでは産業用カメラにて外観検査を行う
メリットなどを紹介していきます。
画像認識とは、カメラなどの媒体で撮影し
た画像から「何がどのように映っているか」 メリット① 検査の効率と生産性の向上
をコンピュータが認識する技術です。 産業用カメラを用いた外観検査は、目視で
撮影したものの形や色の特徴から、それが の検査に比べ効率的に実施することが出来ま
何であるか判断する「パターン認識」という す。
手法によって、画像を判別します。 目視の検査の場合、人間の肉眼で確認する
パターン認識は製造現場以外にも、私たち ため、小さな傷や汚れを見つけることは困難
の日常においてスマートフォンの顔認証機能 です。精度向上のために顕微鏡などで細かい
などで活用されている技術です。 チェックを行うと検査効率が悪くなってしま
います。
2 工場での画像認識例① 一方、高画質な産業用カメラを使えば、小
産業用カメラでの外観検査 さな傷や汚れも瞬時に発見できるため、検査
効率を落とさず高精度の外観検査が可能とな
製造現場における画像認識の活用されてい ります。
る工程に外観検査があります。 また目視より少ない人員で外観検査ができ
外観検査とは、製品や部品などにある外部 るため、これまでの担当者を別の生産工程に
の傷や欠陥、不良部分の有無を確認する工程 回すことができ、生産性の向上にも繋がりま
です。 す。
製造現場における品質管理の一環として実 メリット② ヒューマンエラーの防止
施され、製品の品質や安全性を確保するため
に欠かせない検査となっております。 人間の目での検査の場合、検査員の目の疲
産業用カメラを活用しない場合は、検査員が れや注意力の欠如、検査環境の影響などが要
製品や部品の規格に従って、表面の傷や変形、 因となり、見落としなどのヒューマンエラー
塗装のムラなどを目視でチェックされていま が発生することがあります。見落としは不良
10
Page12
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
品の混入や、製品の品質低下に繋がります。 どちらの方法においても専門の人員が必要
また検査員の経験や技術によって検査の精度 になっており、また物量が多い時や人員の疲
も異なってしまう問題もあります。 労が溜まっている場合にはヒューマンエラー
検査員の訓練や指導が不十分な場合、正確 が発生する可能性が高くなっています。
な判断ができず、不良品を見逃してしまう事 高精度の位置決めを可能にする「パターン
態も発生してしまいます。
産業用カメラであれば、検査数量が多い場 サーチ」
合でも見逃しの心配がありません。また同じ 産業用カメラでの位置決めの精度を高める
性能のカメラと同じ環境を用意すれば、同じ ために「パターンサーチ」という方法が使わ
精度で検査を実行する事が可能です。 れます。
さらに撮像した画像データを保存できるの パターンサーチとは、画像認識にて製品表
で、検査の裏付けになるメリットもあります。 面のパターンを認識し、位置や色・形状・テ
クスチャなど、さまざまな特徴からパターン
3 工場での画像認識例② を見つけます。それらの情報をもとに、製品
産業用カメラでの位置決め の位置決めを行う方法です。
この方法であれば、高精度な位置決めを高
製造ラインの位置決めにおいても産業用カ 速で実施できるため、手動の位置決めに比べ
メラの画像認識技術は大いに活用されます。 て生産性の向上に繋がります。
位置決めは生産ラインにおいて部品や工作 ただ画像が遮られたり、変形すると正確な
機器の正確な位置関係を維持する技術のこと 位置決めが出来ないという課題もあります。
です。コンベヤやロボットなどの自動化装置 このような状況を防ぐためにもカメラの環境
が多く導入された製造ラインでは、正確な位 には注意を払う必要があります。
置決めを行う事が必要不可欠となります。
正しい位置決めが出来ていれば、生産性を 4 画像認識を上手く運用するた
向上させ、不良品の発生を減らすことが出来
ますが、位置決めの精度が低い場合はトラブ めの注意点
ルの原因となってしまいます。 製造ラインの自動化には欠かせない産業用
画像認識を使わない位置決め方法 カメラでの画像認識ですが、導入においての
注意点がございます。
位置決めにおいて産業用カメラを使用しな 注意点① カメラや照明など機材の選定が困難
い場合は、目視や測定器などを用いて行われ
ます。 産業用カメラは非常に種類が多く、細かい
目視の場合は、製品や部品の形状や寸法を スペックの違いで性能も変わってくるため、
確認しながら、目分量で位置を決めます。 選定するものを誤ってしまうだけでうまく画
測定器を用いた場合は、ノギスやマイクロ 像認識出来なくなってしまいます。
メーターを使い、製品や部品の形状や寸法を また画像認識にはカメラだけでなく、照明
正確に測定し、そのデータを基に位置を決め も大きな役割を担うためこちらの選定も重要
ます。 になってきます。照明には大きく分けて、「リ
11
Page13
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
ング照明」「ドーム照明」「ローアングル照明」
「同軸照明」などの種類があり、それぞれに
長所と短所があるため用途に合わせて使い分
ける必要があります。
もし誤った照明を導入してしまうとカメラ
の性能を活かすことが出来なくなってしまい
ます。
注意点② 環境づくりや設定を適切に行う必
要がある
画像認識をはじめとしたカメラの機能は、
周囲の環境によって性能が左右されます。
照明の明るさやカメラと対象物との距離や角
度に問題があると認識精度が低下してしまい
ます。
また撮影条件によって撮影結果が変わるの
で、対象物や運用方法に合わせた設定もとて
も重要です。シャッタースピードやISO感度、
絞り値などを現場にあわせて適切に設定する
必要があります。
画像認識の精度を高めるためには、導入時
のセッティングがとても重要となってきま
す。
12
Page14
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
ロボットによる検査工程の自動化
画像認識技術×ロボットで検査工程を自動化
製造業において、品質を守るカギとなるのが検査工程です。検査工程では、外観検査や数量検査、
性能・機能検査など、さまざまな検査が行われます。
この記事は、検査工程の重要性や自動化における課題、検査工程の自動化を実現する画像認識
技術について解説します。
1 検査工程の重要性と課題 者で検査を行います。特に外観検査では、製
品の寸法や表面の傷を入念に確認する必要が
検査工程は、次工程へものを流す直前の工 あるため、作業者への負担も大きくなる傾向
程であり、後工程でトラブルを起こさないた にあります。
めにも、高い精度で行う必要があります。特 検査工程を自動化することで、作業者を他
に、最終検査工程が不十分で不良品が流出し の工程に割り当てることが可能になり、作業
た場合、納品先やユーザーからのクレームに 者の負担軽減と生産性向上につなげることが
も直結するため、重要な工程のひとつとなっ できます。
ています。 品質の安定化
一方で、検査工程は熟練作業者による経験
やカンに依存していることも多く、単純な作 外観検査では明確な数値目標がないことも
業を繰り返し行うことが多いため、体力的に 多く、作業者ごとの検査のばらつきをなくす
も大変な仕事です。そのため、新しい人材の ことは困難です。またおなじ作業者でも、疲
確保や作業者の育成が難しいといった課題も 労や集中力の低下の影響で、ばらつきが生じ
あります。 ます。
そこで、これらの課題を解決し省力化と品 検査工程を自動化することで、作業者によ
質向上を実現するため、多くの企業で検査工 る検査のばらつきがなくなり、検査品質を安
程の自動化が検討されています。 定化することが可能です。
データの取得と活用
2 ロボットで検査工程を自動化
するメリット 作業者による検査では、検査データを細か
く取得することは困難です。目視で確認した
ロボットによる検査工程の自動化には、次 ものを文章化し、記録に残すことは現実的で
のようなメリットがあります。 はありません。
作業者の負担軽減と生産性向上 検査工程を自動化する場合、検査結果を
データで残すことが可能です。データを蓄積
全数検査が必要な製品は、常に複数の作業 し、目的に応じて整理・分析を行うことで、
13
Page15
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
統計的品質管理に役立てることができます。 複雑な形状の製品を検査するためには、
ワークの奥行きを把握できる 3Dカメラの活
3 ロボットによる検査工程の自 用が重要です。また、多品種少量生産への対
動化の課題 応や、熟練作業者の検査精度を再現するため
には、AI(ディープラーニング)の技術が活
需要の高い検査工程の自動化ですが、実現 用されています。
に向けてはさまざまな課題があります。
多品種少量生産への対応 AI を使用すれば、製品ごとに検査ポイン
トや判定基準を細かく設定しなくても、ある
多品種少量生産の場合、種類ごとに検査の 程度のデータ量があれば AI 自身が合格品・
ポイントが異なります。それぞれの検査基準 不良品を見分けられるよう学習するため、さ
を明確にした上で、それを自動判別できる状 まざまな品種に対応可能です。また、複数の
態に落とし込むためには多大な時間が必要で 製品を同時に検査することも可能になり、速
す。 度が必要な全数検査にも最適です。
中小製造業の多くは、検査の自動化を阻害
する要因として「多品種少量生産」「変種変 5 検査工程の具体的な自動化例
量への対応」をあげています。
複雑な形状への対応 画像認識技術によって検査工程を自動化し
た、具体的な事例を紹介します。
製造業ではさまざまな製品を扱うため、通 梱包に傷や汚れがないかを検査
常のカメラでは検出が難しいケースもありま
す。特に複雑な形状の製品は、カメラの死角 食品工場では、ロボットを使い食品を梱包・
になる箇所があるため、複数の画像にもとづ 出荷します。人の手が入らない工程が多いこ
いて検査を行う必要があります。 とから、完成品の梱包時に、箱に傷や汚れが
また一般的なカメラは、立体的なものを 2 ないかを確認する必要があります。
次元でスキャンするため、製品の奥行きをう 検査工程の自動化では、3D カメラにより
まく認識することができません。ワークの向 箱を立体的に捉え、撮影した画像を AI が分
きを変更するなどの対策を行えば問題ありま 析することで傷や汚れを確認。これによって
せんが、課題として認識しておく必要があり 検査工程の人員を減らすことができ、ライン
ます。 全体の自動化に大きく貢献します。
完成した靴に欠陥がないか検査
4 検査工程の自動化を実現する
画像認識技術 検査工程の自動化は「靴」のような複雑な
形状の製品にまで広がっています。靴の完成
検査工程におけるさまざまな課題を解決す 品に対して、汚れや擦り傷、接着、また不規
るために、3D カメラと AI(ディープラーニ 則な欠陥を、ディープラーニングを活用する
ング)を用いた「画像認識技術」が活用され ことでリアルタイムに検査・識別することが
ています。 可能です。
14
Page16
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報④
事前のトレーニングも、少数の不良品サンプ
ルがあれば実現できるため、少量多品種の検
査にも対応できます。
15