


ロボットを使った工場等の自動化に関するお役立ち情報をまとめました。
⑴産業用ロボットとは?
①協働ロボットと、従来の産業用ロボットとの違い
②協働ロボットが得意とする作業
③協働ロボットが苦手とする作業
⑵未包装品・包装品箱詰め工程における自動化の課題について
①箱詰め作業の課題
②食品工場の自動化に最適なロボット
③包装品・箱詰め工程の自動化事例
⑶ビンピッキングとは?
①ビンピッキング(バラ積みピッキング)とは?
②ビンピッキングを自動化するメリット・デメリット
③ビンピッキングの自動化ポイント
④ビンピッキングの自動化例
⑷ロボットハンドとは?
①ロボットハンドは、人の手や指の役割をこなす
②ロボットハンドの種類と特徴
③ロボとハンドを選ぶ際のポイント
④ロボットハンドの活用例
⑸ロボットビジョンとは?
①ロボットビジョンとは?
②2Dビジョンと3Dビジョンの比較
③3Dのロボットビジョンを実現する技術
④3Dロボットビジョンの活用事例
このカタログについて
| ドキュメント名 | ロボット導入・自動化お役立ち情報 基本編② |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 6.1Mb |
| 取り扱い企業 | 株式会社JRC(ALFIS) (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ロボット導入
自動化
お役立ち情報 基本編②
06-6543-8180
〒 550-0011 大阪市西区阿波座2丁目1番1号 CAMCO西本町ビル5階
Page2
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
協働ロボットとは?
協働ロボットが得意な作業・苦手な作業
工場ではこれまで、人による作業を自動化するため産業用ロボットの導入を検討しても、作業
内容や生産ラインのスペースなどの制約から、導入を断念することが多くありました。それら
の課題を解決するロボットとして導入が進んでいるのが、「協働ロボット」です。
この記事では、協働ロボットと従来の産業用ロボットとの違いや、協働ロボットが得意とする
作業・苦手とする作業について解説します。
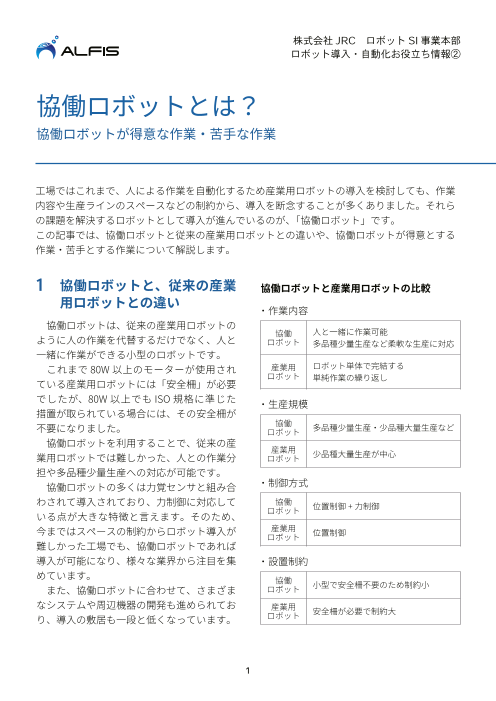
1 協働ロボットと、従来の産業 協働ロボットと産業用ロボットの比較
用ロボットとの違い ・作業内容
協働ロボットは、従来の産業用ロボットの
協働 人と一緒に作業可能
ように人の作業を代替するだけでなく、人と ロボット 多品種少量生産など柔軟な生産に対応
一緒に作業ができる小型のロボットです。
これまで 80W以上のモーターが使用され 産業用 ロボット単体で完結する
ロボット
ている産業用ロボットには「安全柵」が必要 単純作業の繰り返し
でしたが、80W 以上でも ISO 規格に準じた ・生産規模
措置が取られている場合には、その安全柵が
不要になりました。 協働
ロボット 多品種少量生産・少品種大量生産など
協働ロボットを利用することで、従来の産 産業用
業用ロボットでは難しかった、人との作業分 ロボット 少品種大量生産が中心
担や多品種少量生産への対応が可能です。
協働ロボットの多くは力覚センサと組み合 ・制御方式
わされて導入されており、力制御に対応して 協働
ロボット 位置制御 +力制御
いる点が大きな特徴と言えます。そのため、
今まではスペースの制約からロボット導入が 産業用
ロボット 位置制御
難しかった工場でも、協働ロボットであれば
導入が可能になり、様々な業界から注目を集 ・設置制約
めています。 協働
また、協働ロボットに合わせて、さまざま ロボット 小型で安全柵不要のため制約小
なシステムや周辺機器の開発も進められてお 産業用
ロボット 安全柵が必要で制約大
り、導入の敷居も一段と低くなっています。
1
Page3
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
2 協働ロボットが得意とする 現することができます。また、仕上げ工程で
作業 は接触時の反力が一定になるように調整する
ことで、微細な加工が可能です。
協働ロボットは、従来の産業用ロボットで ティーチングが難しい複雑な動き
は実現が難しかったさまざまな作業に対応し
ています。 従来のロボットアームは、ティーチングペ
人とロボットとの作業の分担 ンダントを用いてロボットに動作を指示して
います。しかし複雑な動きは難しく、また動
これまで人が行っていた作業を産業用ロ かし方を変える際には、時間をかけて新しい
ボットで自動化する場合、製造ラインの大き プログラムを構築する必要がありました。
な変更が必要でした。一方、協働ロボットは 協働ロボットは、ダイレクトティーチング
人と並んで作業ができるため、製造ラインの という手法に対応しているため、ロボットの
変更を最小限に抑えることができます。 動作を効率よく指示することができます。作
例えば、ベルトコンベア上を流れる製品に 業者が実際に協働ロボットのアームを動かす
部品の組付けを行う場合、工程の一部を協働 ことで、協働ロボットはその動きを記憶し、
ロボットが担い、残りの作業を人が行うと 再現することが可能です。
いった共同作業が可能になります。 従来ティーチングが難しかった複雑な動き
やわらかい製品・形の異なる製品への対応 や、頻繁な動作の切り替えは、協働ロボット
が得意とする作業の一つです。
これまでの産業用ロボットは、やわらかく
変形しやすい製品や、形が一つずつ異なる野 3 協働ロボットが苦手とする
菜などの食品をうまく扱うことができません
でした。 作業
協働ロボットは、人間の触角とおなじ役割 一方で、協働ロボットが苦手とする作業も
を担う「力覚センサ」と組み合わせることで、 あります。
ロボットハンドがどの程度の強さで物体をつ
かんでいるかを検知でき、柔らかい製品や形 協働ロボットは、人と一緒に作業をするた
の異なる製品を扱うことが可能になります。 め、動作中に人に接触してもすぐに停止でき
これまでは難しかった、食品産業への導入が るよう、動作速度が設定されています。その
加速しています。 ため、人が作業についてこられないような高
精密な組み立てや仕上げ工程 速動作には向いていません。
また、同様の理由でモーターの出力が制限
協働ロボットは、力覚センサを使用するこ されているため、協働ロボットの可搬重量は
とで、精密な工程や仕上げ工程にも対応可能 大型のロボットアームに比べると小さいで
です。 す。重量物を扱う必要がある場合には、安全
嵌め合い作業時には、単純に位置を制御す 性の観点からも、安全柵が必要な従来の産業
るだけではなく、嵌め合い時に変化する反力 用ロボットを仕様しましょう。
をフィードバックすることで、高い精度を実
2
Page4
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
協働ロボットを導入する際には、その特徴
を十分に把握したうえで、生産ライン全体の
中でどの工程を担当させるのかを決めること
が重要です。
3
Page5
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
未包装品・包装品箱詰め工程における
自動化の課題について
食品工場では、食品を様々な状態で扱います。例えば、袋詰めがされる前の「未包装品」や、
ひとつひとつ包装された「個包装品」、またそれらを箱詰めした状態などが挙げられます。
それぞれの工程に特有の課題があるため、人手不足から工場の自動化を検討する場合は、個別
に対策を検討することが重要です。
この記事では、未包装品・個包装品・それらの箱詰め工程について、その課題や自動化のポイ
ントを解説します。
1 箱詰め作業の課題 の連携も考慮する必要があります。
箱詰め作業は、単純な作業を長時間続ける 2 食品工場の自動化に最適な
必要があります。作業者のミスによって、異 ロボット
物混入や不良品が発生する恐れがあるため、
常に集中して作業を行う必要があります。 未包装品を扱う作業の課題
このような根気のいる作業は作業者への負
担も大きく、人の採用がうまく進まなかった 焼き菓子やチーズなどの「未包装品」は、
り、採用できてもすぐに辞めてしまったりと コンベア上を流れる工程で、軽量機に投入し
いった課題があります。人手不足の状況から、 たり、自動包装機に投入できるように整列さ
作業工程の自動化に注目が集まっています。 せる作業が必要です。
箱詰め作業の自動化ポイント 未包装品の多くは、一定量をまとめて袋詰
め・箱詰めするため、その前準備となる整列
食品業界では、扱う製品がそれほど大きく の工程は、短時間でこなす必要があります。
ないことから、スペース効率を重視した人員 しかし、人の速さには限界があり複数人で作
配置が行われます。その配置を変更せずに作 業をせざるを得ないため、人件費がかさみま
業を自動化しようとしても、産業用ロボット す。
の導入は難しいため、協働ロボットの導入が また、包装機に投入するために未包装品を
検討されます。 整列させる際は、稼働中のコンベア上に一定
また、新規ラインや製品切り替えなどのタ の間隔で、向きをそろえて並べる必要があり
イミングであれば、ビジョンセンサと組み合 ます。この作業を長時間続けて行うためには、
わせた「パラレルリンクロボット」などの産 集中力と体力が必要であり、ミスなくこなす
業用ロボットも検討することができます。 のは容易ではありません。
自動化を目的としてロボットを導入する場 未包装品を扱う作業の自動化のポイント
合には、コンベアや軽量機などの周辺機器と
4
Page6
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
一般的に未包装品は「割れやすいもの」「崩 は隙間はほとんどありません。せまい隙間に
れやすいもの」「つかみにくいもの」が多い 製品を詰めていく場合、製品の側面や下面を
ため、ロボットが苦手とする分野です。その 保持するのは難しいため、吸着ハンドを使い
難易度の高さから、ロボットによる自動化が 上面を保持する必要があります。
選択肢に入らないこともあるでしょう。また、 個包装の製品や箱が傷ついているとクレー
むき出しの製品を直接ロボットで扱うことに ムになる可能性が高いため、生産効率ととも
なるため、衛生面にも十分に配慮する必要が に、高い精度での作業が必要とされます。
あります。
未包装品を扱う工程の自動化では、ここの 3 包装品・箱詰め工程の自動化
形や向きを正しく把握し、製品が崩れたり、 事例
変形したりしないように注意しながら、素早
くピックアップする必要があります。 パラレルリンクロボットによる、包装品・
例えば、人の目の代わりとなる「ビジョン 箱詰め工程の自動化例を紹介します。
センサ」で位置や向きを把握し、高速で正確 焼き菓子(未包装品)を次工程に送る作業を
に動作できる「パラレルリンクロボット」を 自動化
複数台組み合わせる構成が考えられます。
個包装品を扱う作業の課題 クッキーなどの焼き菓子の製造工程では、
コンベアで流れてくる焼きあがったお菓子を
「個包装品」の整列や箱詰め作業では、既 並べ替える作業が必要でした。クッキーが割
に放送された製品を扱うため、未包装品に比 れないように注意しながら、ボトルネックに
べると異物混入のリスクは低くなります。し ならない速度で並べ替えるためには、複数人
かし、製品の包装が崩れたり、汚れが付かな での作業が必要です。
いように注意しながら整列や箱詰めを行う必 そこで、高速・高精度のパラレルリンクロ
要があるため、こちらも集中力が必要です。 ボットを導入。ビジョンセンサでクッキーの
また、箱詰めを行う際には、重量の測定が 位置や向きを認識しながらピックアップし、
必要な場合があります。この作業をスムーズ 一定間隔で整列させることが可能になりまし
にこなすにはある程度の経験が必要です。経 た。
験がなくても軽量機を見ながら細かく調整す 自動化をすると、コンベアが停止した際に
ることは可能ですが、時間がかかってしまう 焼きあがったクッキーが溢れてしまう懸念が
ため、生産効率の低下につながります。 ありますが、ロボットの退避機能によって製
個包装品を扱う作業の自動化のポイント 造したクッキーをバッファーコンベアに逃が
すことも可能です。
個包装品は、製品一つ一つが紙やビニール 焼き菓子(個包装品)をトレーに詰める作業
などでおおわれていることが多いため、包装 を自動化
が外れないように注意しながら扱う必要があ
ります。 ピロー包装された焼き菓子を、箱詰めをす
また、箱に余分なスペースがあると輸送中 る前にトレーに詰める場合があります。縦 2
に製品が傷ついてしまうため、箱詰めの際に 列・横 3 列・高さ 3 段ずつ詰める場合、つ
5
Page7
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
かんだ焼き菓子を話す位置を詰める個数に
よって調整する必要があり、自動化の難しい
工程でした。
そこで、高速のパラレルリンクロボットを
導入。横 3 列を 1 回の動作で詰められるロ
ボットハンドを採用し、精度の高い位置制御
を行うことで、複雑な工程の自動化が実現し
ます。
6
Page8
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
ビンピッキングとは?
ビンピッキング自動化のポイントを解説
製造業では既にさまざまな作業が自動化されていますが、従来の産業用ロボットではまだまだ
自動化が難しい作業があります。そのひとつが「ビンピッキング」と呼ばれるピッキング作業
です。自動化が進んだ工場でもビンピッキングは人手で行うことも多く、自動化の課題となっ
ています。
この記事では、ビンピッキングを自動化するメリットや、ビンピッキングの自動化ポイントに
ついて解説します。
1 ビンピッキング ビンピッキングを自動化するにあたり、メ
(バラ積みピッキング)とは? リット・デメリットを紹介します。
ビンピッキング(バラ積みピッキング)は、 ビンピッキング自動化のメリット
容器のなかにバラバラに置かれたワークの山 作業者によるビンピッキングを自動化する
から、適切なものを選択し、つかむ作業をさ ことで、省人化が期待できます。自動化によっ
します。 て手の空いた人員を、他の作業に配分にでき
作業者がビンピッキングをする場合、つか る点も大きなメリットです。
みたいワークの位置や向き、周辺の状況を同 また、小さくて壊れやすいワークを扱う場
時に確認し、他のワークを傷つけないように 合は集中力が必要で、大きくて重いワークを
注意しながらワークをつかみます。これらの 扱う場合には体力が必要です。どちらの作業
作業は人であれば無意識に行うことができま も長時間続けることは大変で、自動化によっ
すが、ロボットであれば高度な技術が要求さ て作業者の負担軽減につながります。
れます。 さらに、複数種類のワークが混在している
さまざまな業界で人手不足が深刻になって ビンピッキングでは、人が作業をする場合、
おり自動化が進められていますが、ビンピッ ミスが発生してしまうことがあります。ロ
キングは自動化がむずかしい作業のひとつで ボットによるビンピッキングの自動化は、品
す。「整列されていない状態」「ワーク形状や 質の向上にもつながります。
向きの把握」「周囲のワークに干渉しない」
などの要素が、ロボットによる自動化を難し ビンピッキング自動化のデメリット
くしています。 専用の自動化設備を導入する際は、初期費
用やメンテナンス費用が必要になり、導入す
2 ビンピッキングを自動化する るシステムによっては高額なコストがかかり
メリット・デメリット ます。
近年は汎用性の高いロボットの開発が進ん
7
Page9
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
でおり、メンテナンスも容易になっているも 様々なワークに対応できるか?
のもあるので、選定の際には、これらのロボッ
トで自動化を検討することが重要です。 複数のラインでビンピッキングを自動化す
る場合は、導入するロボットやロボットハン
3 ビンピッキングの自動化ポイ ドがさまざまなワークに対応できるかが重要
ント なポイントとなります。
ロボットごとに扱えるワークが異なると、
ビンピッキングの自動化を進める際に、考 ライン変更があった時に、柔軟なロボットの
慮すべきポイントを解説します。 配置転換ができません。
前工程不要でビンピッキングができるか? ワークに合わせたロボットハンドの設計がで
ロボットがピッキングしやすいように、前 きるか?
工程で整列などの軽作業が発生すると、完全 ワークのなかには、規格品のロボットハン
な自動化につながりません。作業者による前 ドでは対応が難しいものもあります。
工程不要で、ビンピッキングができるロボッ 特に食品業界では、やわらかいものやひと
トを導入する必要があります。 つずつ形が異なるものがあるため、ワークに
バラ積み状態のワークを正しく認識するた あわせたロボットハンドを設計できるかどう
めには、人間の目の役割を持つ「3D ビジョ かも、あらかじめ確認しておくことが必要で
ンセンサー」が必要です。撮影した画像を処 す。
理することで、つかみたいワークの形状や位 周辺機器とスムーズに連携出来るか?
置、姿勢などを認識し、周囲のワークに悪影
響を与えないよう、最適なつかみ方を判断し 既に他のロボットや生産システムが導入さ
ます。 れている場合、周辺設備とスムーズに連携で
ワーク変更時の段取り替えは効率的か? きるかが求められます。
現場にあわせた最適なシステムの選定は、
通常、複数種類のワークを同一のロボット 導入後の運用に大きく影響するため、重要な
で扱う場合、ワークごとにロボットハンドの ポイントのひとつです。
交換やプログラミングの再調整が必要です。
しかし、多品種少量生産や混載のビンピッキ 4 ビンピッキングの自動化例
ングを行う際は、非効率です。
そこで、複数のワークを扱えるロボットハ 作業者の負荷軽減や生産性向上を実現す
ンドや、段取り替えをスムーズに行えるシス る、ビンピッキングの自動化例を紹介します。
テムが搭載されていいるかが、自動化を行う 重量物のビンピッキングの自動化
際にの重要なポイントのひとつです。段取り
替えの回数を最低限に抑え、一回あたりの段 バラ積み状態の重量物を、別の場所へ整列
取り替え時間を短縮することで大きな効率化 させる作業を自動化。
につなげることができます。 ビジョンセンサでワークの位置や姿勢を認
識し、自動で取り出せるロボットアームを導
8
Page10
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
入することで、作業者の負荷軽減を実現しま
す。
作業者の疲労による供給ペースの低下もな
くなり、生産性の向上にもつながります。
食品工場のビンピッキングの自動化
バラ積み状態の青果を、きれいに整列させ
る作業を自動化。
ビジョンセンサで青果の形状を把握し、自
動で次工程へ送る協働ロボットを導入するこ
とで、作業者の負荷軽減を実現します。
やわらかい材質のロボットハンドを採用す
ることで、青果を傷つけることもありません。
9
Page11
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
ロボットハンドとは?
ロボットハンドの種類と選定ポイント
工場の現場では、ロボットアームやパラレルリンクロボットなど、さまざまな産業用ロボット
が活用されています。それらのロボットに接続し、実際にワークをつかむのが「ロボットハンド」
です。
この記事では、ロボットハンドの種類やそれぞれの特徴、ロボットハンドを選定する際のポイ
ントについて解説します。
1 ロボットハンドは、人の手や 把持型のロボットハンド
指の役割をこなす
「把持型」は、人間の手のように複数の指
ロボットハンドは、産業用ロボットの先端 でつかむロボットハンドです。指の本数は、
に接続し、人間の手の代わりをする部品です。 2~ 4本のものが一般的です。さまざまな形
人間の手のように 5本指のハンドも開発され 状・素材のワークを扱うことができ、つかむ
ていますが、ほとんどの場合、扱うワークに 力が強いものは加工工程でワークを固定する
あわせて必要な本数で設計されているため、 ことも可能です。
2本指や 3本指のものもあります。 指の部分を動かす駆動力には、「電動」の
また、ワークをつかむのではなく吸着する ものと「空気圧」のものがあります。
タイプのハンドや、加工や溶接をそのまま行 ・電動型ロボットハンド
えるよう工具が装着されているものもありま 電動型は、ワークをつかむ位置を連続的に
す。近年は、複数種類の製品を共通のロボッ 設定することができ、共通のロボットハン
トハンドで扱えるような、汎用性の高いボッ ドで、サイズや向きが異なるワークを扱う
トハンドも開発されており、多品種少量生産 ことができます。
に対応することが可能です。 また、空気圧型に比べると、エア供給用の
適切なロボットハンドを活用することで、 ホースやコンプレッサが不要で、シンプル
生産性や品質向上だけでなく、新しい生産ラ な接続構成が可能です。
インを短期間で立ち上げることも可能です。 ・電動型ロボットハンド
空気圧型は、コントローラが不要なた
2 ロボットハンドの種類と特徴 め導入初期の設定はスムーズです。また、
展開されているバリエーションが多岐にわ
ワークを直接扱うロボットハンドは、主に たるため、目的にあった種類が見つかりや
「把持型」と「吸着型」に分類することがで すいこともメリットです。
きます。ワークの種類や状態に応じて、使い ロボットハンド自体が軽量なため可搬重量
分けがされています。 を活かすことができ、特に重いワークを扱
10
Page12
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
う際に用いられています。 ドの把持・吸着力が影響します。
吸着型のロボットハンド また、ワークの材質や形状、表面の状態に
よっては、把持・吸着力を発揮できない場合
「吸着型」は、ワークを吸着し運ぶロボッ があります。選定対象のロボットハンドが、
トハンドです。把持型のように、指を動かす 扱うワークに対応しているかどうかを必ず確
必要がないため、ワークをつかんだり離した 認しましょう。
りする速度が速い点が特徴です。一方で、使 特に共通のロボットハンドで複数種類の
用していくなかで、吸着力が低下してしまう ワークを扱う際には、注意が必要です。
ことがあり、把持型よりも頻繁なメンテナン ロボットハンドの材質
スが必要になります。
吸着型のロボットハンドは、吸着をする際 食品など、やわらかい材質のワークを扱う
の仕組みから、「真空型」と「磁力型」に分 場合には、ワークを傷付けないようにロボッ
類できます。 トハンドの材質に注意が必要です。近年は、
・真空型ロボットハンド 食品工場での使用を想定した、エラストマー
真空型は吸引型ともよばれ、真空を発生す 製のロボットハンドが開発されています。
る設備やエアコンプレッサーが必要なた ロボットハンドの制御精度
め装置全体が大きくなる傾向があります。
機構自体は単純で、大きなワークも運べま ロボットハンドの指の位置や把持力、吸着
すが、表面に水や油が付着していたり、凹 力を細かく調整できるかどうかも重要なポイ
凸や穴があると、うまく吸着できないため ントです。多くの産業用ロボットは位置制御
注意が必要です。 を行っていますが、ワークが不定形であった
・磁力型ロボットハンド り、位置がずれている場合、精密な制御をす
磁力型は電磁石を用いており、電流を流す ることができません。
ことでワークを吸着することができます。 精密な制御をする場合には、力覚センサな
真空型が苦手とする凹凸のある形にも対応 どを活用して力の制御をする必要がありま
できますが、磁力を用いるため、扱えるワー す。位置が一定でない場合でも、ロボットハ
ク材質が、一部の金属などに限られます。 ンドでつかむ際の力が一定になるように制御
を行えば、ワークを傷つけずにつかむことが
3 ロボットハンドを選ぶ際の 可能です。
ポイント ロボットハンドの信頼性
さまざまな種類のロボットハンドから、自 ロボットハンドは、常に作動し続けている
社の工程にあったものを選ぶ際に考慮すべき ため大きな負荷がかかります。特に段取り替
ポイントを解説します。 えがなく、同一のロボットハンドを継続的に
ロボットハンドの把持・吸着力 使用する場合には、高い信頼性が必要です。
信頼性が低い場合、使用していくなかで性
重いワークを扱えるかどうかは、ロボット 能が低下してしまうため頻繁なメンテナンス
アームの可搬重量だけでなく、ロボットハン や交換が必要になってしまい、コストアップ
11
Page13
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
にもつながってしまいます。 きないことがあります。
吸着型のロボットハンドを採用しつつ、食
4 ロボットハンドの活用例 品のカスを処理することで、食品を傷つけず
に整列や包装機への投入を行うことが可能で
ロボットハンドの具体的な活用例を紹介し す。
ます。
3D ビジョンを活用して最適なつかみを行う
バラ積みのワークを扱う場合、ワークの位
置や向きが一定ではありません。そこで、「3D
ビジョンセンサ」で取得した情報をもとに、
把持型のロボットハンドを制御することで、
ワークの位置や向きにあわせた最適なつかみ
方が可能です。
周囲のセンサとロボットハンドを連携させ
ることで、ロボットの前工程で人が整列など
の作業を行う必要がなくなり、生産性向上や
作業者の負荷軽減につながります。
協働ロボット向けの汎用性が高いロボットハ
ンド
協働ロボットは、作業者の代わりにライン
に入ることが可能で、複数の工程を担うこと
もあります。その都度ロボットハンドを交換
して対応することもできますが、複数の工程
に対応した汎用性の高いロボットハンドであ
れば、交換が不要です。
例えば、ワークと密着していない状態でも
吸着が可能なロボットハンドであれば、従来
の吸着型ハンドが苦手としていた、球状や円
筒状のワーク、凹凸の多いワークにも対応す
ることが可能です。
崩れやすい食品向けの吸着ロボットハンド
ラスクやクッキー、スポンジケーキなどを
扱う場合、把持型ロボットハンドでは割れた
り崩れたりしてしまったり、吸着型ロボット
ハンドでは食品のカスが原因でうまく吸着で
12
Page14
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
ロボットビジョンとは?
2D・3Dロボットビジョンと活用事例
これまで産業用ロボットは「決められたワーク」が「決められた位置」にないと扱うことが難
しく、人間のような柔軟な作業は苦手とされてきました。そこでロボットの活用範囲を広げる
ため、開発や導入が進んでいるのが「ロボットビジョン」です。
この記事では、ロボットビジョンの概要や、3D ロボットビジョンを実現する技術、その活用事
例を紹介します。
1 ロボットビジョンとは? おり、3D ビジョンは奥行きの情報まで考慮
した画像の取得・分析を行うことが可能です。
ロボットビジョンは「マシンビジョン」と これまで、平面的なワークの形状確認や外
もよばれ、産業用ロボットと組み合わせて使 観検査には、2D ビジョンが使用されていま
用されるカメラシステムの総称です。ワーク したが、バラ積みされたワークのなかから
の位置や向きの検出、外観検査に使われてお ワークをピックアップすることは困難でし
り、人間でいう「目」の役割を担います。 た。
例えば、ばら積みされたワークの整列工程 3D ビジョンでは、奥行き(3D)の情報を
や、ひとつひとつ形が異なる製品のピック 取得することで、人間の目と同様に「ワーク
アップでは、ロボットビジョンによるワーク までの距離」を正確に測定することができま
認識が重要となります。また、ロボットビジョ す。そのため、バラ積みされたワークのピッ
ンで取得した情報を活用することで、作業中 クアップを、人間と同等の精度で実現するこ
の不良品を除外することも可能です。 とが可能となりました。
ロボットビジョンは主に、周辺の状況を画
像や動画として取得する「センサ(カメラ)」 3 3D のロボットビジョンを実
と、その情報を処理する「画像処理システム」 現する技術
で構成されています。ロボットビジョンで取
得・分析した情報に基づいてロボットを動か 3D のロボットビジョンを実現するために
すことで、精度の高い作業が実現します。 は、「3D カメラ」と「ディープラーニング」
などの AI を用いた画像認識技術が不可欠で
2 2D ビジョンと 3D ビジョン す。
の比較 3Dカメラ(3Dセンサ)
ロボットビジョンは主に、「2D ビジョン」 3D ビジョンで用いられる縦・横・奥行き
と「3D ビジョン」に分類できます。 の三次元情報は、3D カメラによって取得さ
2D ビジョンは縦横の情報のみを取得して れます。
13
Page15
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
3D カメラの方式は、主に「ステレオ方式」 通常、「複雑な形状のワーク」や「不規則
と「ToF 方式」があります。 な位置のワーク」を扱うためには、時間をか
・ステレオ方式 けて学習を行う必要があります。その時間を
ステレオ方式は、複数のカメラで撮影した 大幅に短縮するのが、AI(ディープラーニン
画像を組み合わせることで、奥行きの情報 グ)です。
を取得します。人間が「二つの眼」によっ AI による画像認識では、3D カメラで撮影
て、立体的にものを捉えるのとおなじ考え した複数のワークの画像を、ディープラーニ
方です。 ングを用いたアルゴリズムに読み込ませるこ
カメラからワークまでの距離は、カメラど とで、ワークの位置や向きを推定することが
うしの距離、カメラの焦点距離、視差(左 できるようになります。
右のカメラによる見える方向の違い)によ ディープラーニングは「深層学習」とも
って算出されます。これにより、人間の目 よばれ、人間の脳神経回路をモデル化した
と同等以上の情報を取得できるため、安定 ニューラルネットワークを用いた機械学習手
した作業が可能です。 法です。従来の機械学習では、学習を行うた
一方で、ステレオ方式で正確に奥行きの情 めに必要な情報を人間が与える必要がありま
報を取得するためには、校正作業が不可欠 したが、ディープラーニングでは、情報をア
です。校正はカメラ位置を変更しながら行 ルゴリズム自体が与えられたデータから抽出
うため、製造ラインに組み込まれた状態で します。学習を自動で繰り返し行うことで、
は、校正が難しい場合もあります。 精度を高めていくことが可能です。
・ToF 方式 デ ィープラーニングは、画像認識を中心に
ToF は、光の飛行時間(Time of Flight)か 音声認識や自然言語処理、設備の異常検知な
ら距離、奥行きを算出する方式です。 ど、私たちの日常生活に近い内容も含め、幅
ToF 方式のカメラは、光源とセットになっ 広い領域で活用されています。
ており、光源から照射した光が物体に反射
しカメラに戻ってくるまでの時間をもとに 4 3D のロボットビジョンの
距離を算出しています。光源には、パルス 活用事例
光が用いられる場合と、連続光が用いられ
る場合があります。 3D のロボットビジョンが活用されている
ToF 方式は撮影可能な距離が長く、低コス 事例を紹介します。
トで導入できることから、物流分野のピッ 複雑なワークのビンピッキング
キングロボットなどに多く採用されていま
す。 複雑な形のワークは形状の特定が難しく、
一方で太陽光があたる場所では、物体に反 それらがバラ積みされている場合は、周辺の
射した光を正確に検出できないため、屋外 ワークに影響を与えないようにピッキングを
で使用する可能性がある場合には不向きで する必要があります。
す。 このような作業を自動化するためには、こ
AI による画像認識(ディープラーニング) れまで時間をかけてトレーニングを行う必要
がありました。しかし、AI を搭載した 3D ロ
14
Page16
株式会社 JRC ロボットSI 事業本部
ロボット導入・自動化お役立ち情報②
ボットビジョンを用いることで、大幅にト
レーニング時間を短縮することが可能です。
変形文字を高速で認識し分類
ペットボトルなど、曲面に印字された文字
は変形しており、通常の画像認識では精度を
発揮することができませんでした。
3D ロボットビジョンを活用することで、
高い精度で文字を高速認識できるようにな
り、複数のワークを同時に認識しながら、検
査や分類を行うことが可能です。
混載された箱のパレタイズ
異なる種類の箱が混載されているデパレタ
イズでは、箱の種類や位置・向きを正確に把
握する必要があります。
3D ロボットビジョンを活用することで、
奥行きの情報が把握できるため、箱の位置や
大きさを推定し、適切なピッキングすること
が可能です。作業の正確性と速度向上に大き
く貢献します。
15