


ORANGE
このカタログについて
| ドキュメント名 | ECU最適化支援ツール |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.5Mb |
| 関連製品 | |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社小野測器 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
基本仕様
ORANGE Navigator ORANGE
機能名 仕様 備考
データインポート 実験計画データ カンマ区切り形式ファイル(.csv) Navigatior & Optimizer
データエクスポート 実験データ
ORANGE Navigator出力ファイル(.Zip)
定常モデル用データ、過渡モデル用データをまとめて出力できます。
ECUモニタとの通信機能: ASAM-MCD-3MC
その他
計画点: 最大2000点/LB
定常適合 ECU最適化支援ツール
手法 設計変数
限界点探索 事前に探索方向を決めておき、限界点探索運転を実行します。固定方向探索 2~10 探索方向は、直行方向、頂点方向や、実験計画法で決定することができます。
逐次探索 2~10 探索結果を考慮し、次の探索方向を柔軟に決定します。
手法 設計変数 水準数 概要
任意計画 1~20
自由に計測点を設定することができます。
- .csvファイルでインポートすることも可能です。 OP-5100 / OP-5200
全因子計画 1~5 3 3水準の全組合わせの実験計画ができます。
Centrac-composie(中心複合計画) 2~20 5 2次の応答曲面の近似に適した実験計画ができます。
Face-Centerd-Cube(面心立方格子計画) 2~20 3
事前計画
Box-Behnken 3~7 3
D最適計画 1~20 2~20
モデルベースの実験計画法で、最大5次までの実験計画ができます。
境界内計画 境界モデル内での実験計画にも使用可能です。 適合試験計画~最適化までのフローを円滑に行い、
ラテン超方格計画 2~20 計画点数が均等分布するように設計空間を格子状に細かく分割して交点に計画点を配置する計画法です。
凸境界衝突計画 2~20
水準指定無し(ランダム)
空間充填計画 2~20 事前計画
最適化業務をトータルでサポート
or
水準数指定(2~20)
水準指定無し(ランダム) 事前計画
仮想照度計画 2~20 or or 仮想照度の小さい点に計画を行うことで、仮想照度の高い実験計画を作成することができます。
水準数指定(2~20) 逐次実験計画
過渡オプション
遅れモデルを作成するための計画です。
トルク変化計画 回転速度指令値を固定して、トルク指令値を台形のパターンで計画します。
計画
定常モデルに状態量を入力可能にする拡大定常モデルを作成するための計画です。
回転トルク変化計画 状態量モデルを利用して、自動で運転パターンを生成します。
ORANGE Optimizer
機能名 仕様 備考
テキストファイル(.txt)、CSVファイル(.csv)、TSVファイル(.tsv)、Microsoft Excelワークブック(.xlsx)、
データインポート 実験データ ORANGE Navigator出力ファイル(.Zip)
項目数: 最大1024、データ点数: 最大1000万点
モデルエクスポート ECUモニタとの通信機能: ASAM-MCD-3MC
補間手法: 格子補間、AKIMA補間、三角メッシュ
その他
定常適合
手法 次数 設計変数 備考
多項式モデル 最大5次 最大10 物理現象にあわせて、最大5次までの応答曲面を作成することができます。
RBFモデル - 最大10 ガウス関数を重ね合わせることにより多峰性のある応答曲面を作成することができます。
定常モデル 領域分割モデル - 最大10 設計空間を小領域に分割し、小領域を1次、または2次多項式モデルで近似した後に接続することによって、
変曲点のある応答曲面を作成することができます
ロバストモデル - - 多項式モデル、RBFモデル、領域分割モデル作成時に、目的変数のロバスト性もモデル化することが可能です。
ロバスト性を目的変数に設定することが可能です。
バウンダリーモデル - - 限界点探索運転で得られた限界点で境界モデルを作成します。境界内で最適値を得ることができます。
手法 目的変数 制約変数 備考
単一GA 1 最大9 単一目的最適化にGAを利用して実行します。
ローカル
定常 多目的GA 2~10 - 自然淘汰のシミュレーションを多目的最適化に適用し、パレート最適解集合を求める手法です。
最適化 Σ多目的GA 2~10 - ローカルパレート解の中から最適な会の組み合わせを求めることができます。
グローバル 走行シミュレーション最適化 2~10 - ローカルパレート解の中から、モード運転のシミュレーション結果最適になる会の組み合わせを求めることができます。
グローバル最適値の選択時、ECUマップの滑らかさを指標とした最適化探索が実行できます。
過渡適合オプション
遅れモデル - - むだ時間や一次遅れをモデル化します。
過渡モデル 拡大定常モデル - - 定常モデルに状態量を入力可能にしたモデルです。
結合モデ ル - - 定常モデル、遅れモデル、外部(MATLAB)モデル)を組み合わせてエンジンの複雑な挙動をモデル化することができます。
手法 目的変数 制約変数 備考
過渡
最適化 グローバル 走行シミュレーション最適化 2~10 -
各モデルを組み合わせた過渡シミュレーションモデルを使って、過渡状態の最適化を行います。評価パターンを任意に設定することで、
法規モードに対応した最適値を演算することや、運転領域全体を最適化することが可能です。
※Microsoft® Windows® は米国Microsoft Corporationの米国およびその他の国における登録商標です。 その他記載されている会社名、 製品名は各社の商標または登録商標です。
お客様へのお願い 当社製品(役務を含む)を輸出または国外へ持出す際の注意について
当社製品(役務を含む)を輸出または国外へ持出す場合は、外為法(外国為替及び外国貿易法)の規定により、リスト規制該当品であれば、経済産業大臣へ輸出許可申請の手続きを
行ってください。また非該当品であれば、通関上何らかの書類が必要となります。尚、非該当品であってもキャッチオール規制に該当する場合は、経済産業大臣へ輸出許可申請が必要と
なります。お問い合わせは、当社の最寄りの営業所または当社輸出管理担当窓口(電話045-476-9707)までご連絡ください。
●記載事項は変更になる場合がありますので、ご注文の際はご確認ください。 注意 ●機器を正しく安全にお使いいただくために、ご使用前に必ず「取扱説明書」をよくお読みください。
●代理店・販売店
〒222-8507 神奈川県横浜市港北区新横浜3‒9‒3 TEL(. 045)935‒3888
お客様相談室 フリーダイヤル 0120-388841
受付時間 : 9:00~12:00/13:00~18:00(土・日・祝日を除く)
北 関 東(028)684‒2400 浜 松(053)462‒5611 広 島(082)246‒1777
埼 玉(048)474‒8311 ト ヨ タ(0565)31‒1779 九 州(092)432‒2335
首 都 圏(045)935‒3838 中 部(0565)41‒3551 海 外(045)935‒3918
沼 津(055)988‒3738 関 西(06)6386‒3141
ホームページアドレス https://www.onosokki.co.jp/
E‒mailアドレス webinfo@onosokki.co.jp
CAT.NO. 1426-06 Printed in Japan(U) 206( OKI) '20.6月改訂
Page2
適合試験計画ツール 最適化ツール
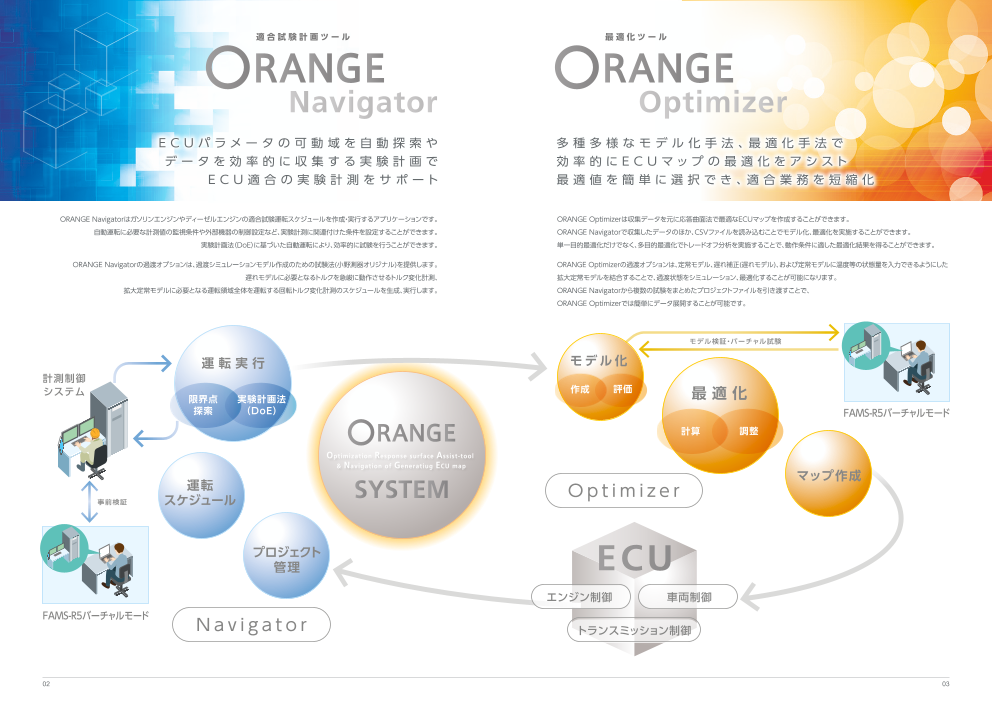
E C U パ ラメー タ の 可 動 域 を 自 動 探 索 や 多 種 多 様 な モ デ ル 化 手 法 、最 適 化 手 法 で
デ ー タを 効 率 的 に 収 集 す る 実 験 計 画 で 効 率 的 に E C U マップ の 最 適 化 を アシ スト
E C U 適 合 の 実 験 計 測 を サ ポ ート 最 適 値 を 簡 単 に 選 択 で き 、適 合 業 務 を 短 縮 化
ORANGE Navigatorはガソリンエンジンやディーゼルエンジンの適合試験運転スケジュールを作成・実行するアプリケーションです。 ORANGE Optimizerは収集データを元に応答曲面法で最適なECUマップを作成することができます。
自動運転に必要な計測値の監視条件や外部機器の制御設定など、実験計測に関連付けた条件を設定することができます。 ORANGE Navigatorで収集したデータのほか、CSVファイルを読み込むことでモデル化、最適化を実施することができます。
実験計画法(DoE)に基づいた自動運転により、効率的に試験を行うことができます。 単一目的最適化だけでなく、多目的最適化でトレードオフ分析を実施することで、動作条件に適した最適化結果を得ることができます。
ORANGE Navigatorの過渡オプションは、過渡シミュレーションモデル作成のための試験法(小野測器オリジナル)を提供します。 ORANGE Optimizerの過渡オプションは、定常モデル、遅れ補正(遅れモデル)、および定常モデルに温度等の状態量を入力できるようにした
遅れモデルに必要となるトルクを急峻に動作させるトルク変化計測、 拡大定常モデルを結合することで、過渡状態をシミュレーション、最適化することが可能になります。
拡大定常モデルに必要となる運転領域全体を運転する回転トルク変化計測のスケジュールを生成、実行します。 ORANGE Navigatorから複数の試験をまとめたプロジェクトファイルを引き渡すことで、
ORANGE Optimizerでは簡単にデータ展開することが可能です。
モデル検証・バーチャル試験
運 転 実 行 モデル化
計測制御
システム 作成 評価
限界点 実験計画法 最 適 化
探索 (DoE) FAMS-R5バーチャルモード
計算 調整
Optimization Response surface Assist-tool
& Navigation of Generatiug ECU map
運転
マップ作成
スケジュール Op t im i z e r事前検証
プロジェクト
管理
エンジン制御 車両制御
FAMS-R5バーチャルモード Na v i g a t o r トランスミッション制御
02 03
Page3
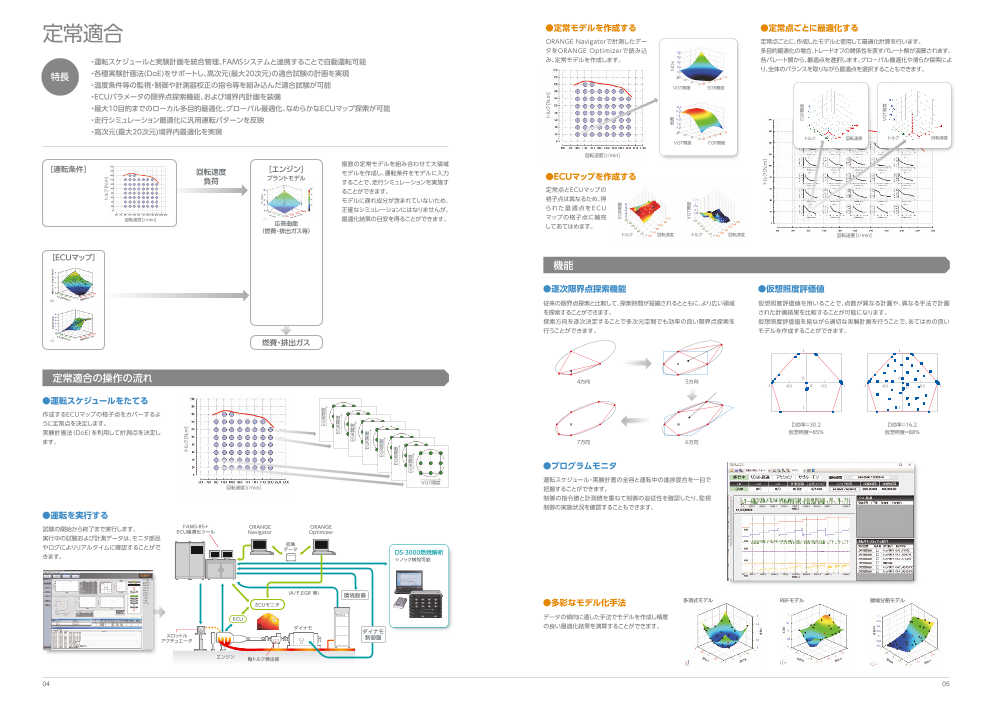
定常適合 ●定常モデルを作成する ●定常点ごとに最適化するORANGE Navigatorで計測したデー 定常点ごとに、作成したモデルと使用して最適化計算を行います。
タをORANGE Optimizerで読み込 多目的最適化の場合、トレードオフの関係性を表すパレート解が演算されます。
・運転スケジュールと実験計画を統合管理、FAMSシステムと連携することで自動運転可能 み、定常モデルを作成します。 各パレート解から、最適点を選択します。グローバル最適化や滑らか探索によ
・各種実験計画法(DoE)をサポートし、高次元(最大20次元)の適合試験の計画を実現 り、全体のバランスを取りながら最適点を選択することもできます。特長
・温度条件等の監視・制御や計測器校正の指令等を組み込んだ適合試験が可能 VGT開度 EGR開度
・ECUパラメータの限界点探索機能、および境界内計画を装備
・最大10目的までのローカル多目的最適化、グローバル最適化、なめらかなECUマップ探索が可能
・走行シミュレーション最適化に汎用運転パターンを反映
・高次元(最大20次元)境界内最適化を実現
トルク 回転速度 トルク 回転速度
VGT開度 EGR開度
回転速度[r/min]
複数の定常モデルを組み合わせて大領域
[運転条件] 回転速度 [エンジン] モデルを作成し、運転条件をモデルに入力
負荷 プラントモデル ●ECUマップを作成するすることで、走行シミュレーションを実施す
ることができます。 定常点とECUマップの
モデルに遅れ成分が含まれていないため、 格子点は異なるため、得
正確なシミュレーションにはなりませんが、 られた最適点をECU
回転速度[r/min]
応答曲面
最適化結果の目安を得ることができます。 マップの格子点に補完
してあてはめます。
(燃費・排出ガス等)
トルク 回転速度 トルク 回転速度 回転速度[r/min]
[ECUマップ]
機能
●逐次限界点探索機能 ●仮想照度評価値
従来の限界点探索と比較して、探索時間が短縮されるとともに、より広い領域 仮想照度評価値を用いることで、点数が異なる計画や、異なる手法で計画
を探索することができます。 された計画結果を比較することが可能になります。
探索方向を逐次決定することで多次元空間でも効率の良い限界点探索を 仮想照度評価値を見ながら適切な実験計画を行うことで、あてはめの良い
行うことができます。 モデルを作成することができます。
燃費・排出ガス
1 1
定常適合の操作の流れ 0 04方向 5方向
-1 -0.5 0 0.5 1 -1 -0.5 0 0.5 1
●運転スケジュールをたてる
1 1
作成するECUマップの格子点をカバーするよ
うに定常点を決定します。 D効率=30.2 D効率=16.2
実験計画法(DoE)を利用して計測点を決定し VGT開度 仮想照度=85% 仮想照度=88%
ます。 VGT開度 7方向 6方向
VGT開度
VGT開度
VGT開度 ●プログラムモニタ
VGT開度
VGT開度 運転スケジュール・実験計画の全容と運転中の進捗度合を一目で
回転速度[r/min] 把握することができます。
制御の指令値と計測値を重ねて制御の追従性を確認したり、監視
制御の実施状況を確認することもできます。
●運転を実行する
試験の開始から終了まで実行します。 FAMS-R5+ ORANGE ORANGEECU最適化ツール Navigator Optimizer
実行中の試験および計測データは、モニタ部品
やログによりリアルタイムに確認することがで 収集データ
きます。
DS-3000燃焼解析
※ノック検知可能
(A/F,EGR 等) 環境設備
●多彩なモデル化手法 多項式モデル RBFモデル 領域分割モデルECUモニタ
ECU データの傾向に適した手法でモデルを作成し精度
ダイナモ の良い最適化結果を演算することができます。
ダイナモ
スロットル
アクチュエータ 制御盤
エンジン 軸トルク検出器
04 05
トルク[N.m]
トルク[N.m]
EGR開度
EGR開度
EGR開度
EGR開度
EGR開度
EGR開度
EGR開度
トルク[N.m]
EGR開度
燃費 NOx
VGT開度
トルク[N.m]
EGR開度
VGT開度
Page4
過渡適合オプション 過渡適合の操作の流れ
●トルク変化計測、回転トルク変化計測を行う
・定常モデルをベースに過渡シミュレーションモデルを作成するため、定常適合のデータを有効活用
空気・温度・計測等の遅れ要素をモデル化する
特長 ・小さい要素モデルを組み合わせて大きなモデルを作成が可能なため、プラントモデルを成長成長させることが可能 ため、トルク変化計測を行います。回転を固定し
・過渡モデル作成のための試験でも、ECU通信は従来の規格 (ASAP3)で実現。ECU高速通信は不要 てトルク負荷を0~100%にスイープさせる台
・過渡運転は台形パターン(スイープ+安定)の繰り返しとなっているため、既存設備で計測可能 形パターンで、遅れ時間を算出します。
・複数のデータをプロジェクト管理でき、ORANGE NavigatorからORANGE Optimizerへのデータ引き渡しがスムーズ 定常モデルの入力に状態条件(温度)を追加す
・シミュレーションする運転パターンを任意に設定でき、仕向け地に合わせた過渡最適化結果を得ることが可能 るために、回転トルク変化計測を行います。
ORANGEは最適な回転トルク変化計測パター
ンを自動で生成します。 回転速度 回転速度
定常モデルに遅れ成分や温度等の状態量 ●遅れモデルを作成する
[運転条件] 回転速度 [エンジン] を接続することで過渡シミュレーションの
プラントモデル 指令に対して計測値がどれだけ遅れたかを計測することで、遅れ時間を演算することができます。 実測負荷 精度を向上することができます。 定常モデル
また、ECUの制御遅れ等もプラントモデル ■遅れ補正前 ■遅れ補正後 温度遅れモデル
に接続することで、さらに精度向上が図れ
550 550
500 500
るとともに、制御定数の最適化を実施する 450 450
400 400
応答曲面
ことができます。 350 350
300 300
(燃費・排出ガス等) 250 250
200 200
150 150
100 100
[ECUマップ] 制御量
0 5 10 15 20 25 30 35 40 45 50 0 5 10 15 20 25 30 35 40 45 50
[ECU] 1 時間[ s] 時間[ s]
制御モデル (バルブ開度等)
●拡大定常モデルを作成する ●過渡シミュレーションモデルを作る
状態量
(吸気量等)
回転トルク変化運転結果を利用して、状態量をモデルの入力に追加できます。 小さい要素モデル(定常モデル、遅れモデル、演算式、拡大定常モデル、ECU
遅れ要素 下図はタービン入口温を追加した例 制御モデル等)を組み合わせて、過渡シミュレーションモデルを作成します。
(空気・温度等)
[定常モデル] NOxモデル
マップ補完 噴射タイミング NOx
PID制御 2 燃費・排出ガス
❶:運転時の過渡的な変化をプラントモデルに反映
❷:ECUでの制御とプラントモデルを連携
[拡大定常モデル] 拡大NOxモデル
過渡適合の考え方 噴射タイミング NOx
タービン入口温
●定常モデルに過渡要素を追加する
定常モデルをベースに、過渡要素を追加していきます。過渡シミュレーションモデルは、時系列データを ●過渡シミュレーションパターンを生成する
入力することで、時系列データをシミュレーションすることができます。 過渡シミュレーションを実行するパターンは、法規モードや任意パターン、実測データから生成することができます。
時系列のシミュレーションのため、温度や排出ガスの遅れを再現することが重要です。
車両諸元 エンジン諸元
定常適合 走行速度 動力伝達
(法規、任意パターン) シミュレーション
定常データ 定常モデル 定常予測値
運
転
過渡適合 回転率・負荷率 条
時系列データ 時系列予測値 (法規、任意パターン)
回転/負荷演算
件
過渡要素
回転速度・負荷・アクセル開度等
(実測値)
実測
時間遅れ 定常
定常+過渡 ●シミュレーションにより最適化を行う
ピーク値のずれ 過渡シミュレーション時の排出ガスや燃費の積 ■JE05(最初の240 s積算) ベース 最適化
算値・瞬時値等を対象として、最適なECUマッ 燃費
プを計算します。 0.6%
NOx 黒煙
改善
シミュレーションを行いながら、手動でECU 6.8%
マップを編集することも可能です。 改善 8.0%
改善
0 5 10 15 20 25 30 35 40
時間[ s]
06 07
NOx
タービン入口温
トルク
タービン入口温
トルク
Page5
基本仕様
ORANGE Navigator ORANGE
機能名 仕様 備考
データインポート 実験計画データ カンマ区切り形式ファイル(.csv) Navigatior & Optimizer
データエクスポート 実験データ
ORANGE Navigator出力ファイル(.Zip)
定常モデル用データ、過渡モデル用データをまとめて出力できます。
ECUモニタとの通信機能: ASAM-MCD-3MC
その他
計画点: 最大2000点/LB
定常適合 ECU最適化支援ツール
手法 設計変数
限界点探索 事前に探索方向を決めておき、限界点探索運転を実行します。固定方向探索 2~10 探索方向は、直行方向、頂点方向や、実験計画法で決定することができます。
逐次探索 2~10 探索結果を考慮し、次の探索方向を柔軟に決定します。
手法 設計変数 水準数 概要
任意計画 1~20
自由に計測点を設定することができます。
- .csvファイルでインポートすることも可能です。 OP-5100 / OP-5200
全因子計画 1~5 3 3水準の全組合わせの実験計画ができます。
Centrac-composie(中心複合計画) 2~20 5 2次の応答曲面の近似に適した実験計画ができます。
Face-Centerd-Cube(面心立方格子計画) 2~20 3
事前計画
Box-Behnken 3~7 3
D最適計画 1~20 2~20
モデルベースの実験計画法で、最大5次までの実験計画ができます。
境界内計画 境界モデル内での実験計画にも使用可能です。 適合試験計画~最適化までのフローを円滑に行い、
ラテン超方格計画 2~20 計画点数が均等分布するように設計空間を格子状に細かく分割して交点に計画点を配置する計画法です。
凸境界衝突計画 2~20
水準指定無し(ランダム)
空間充填計画 2~20 事前計画
最適化業務をトータルでサポート
or
水準数指定(2~20)
水準指定無し(ランダム) 事前計画
仮想照度計画 2~20 or or 仮想照度の小さい点に計画を行うことで、仮想照度の高い実験計画を作成することができます。
水準数指定(2~20) 逐次実験計画
過渡オプション
遅れモデルを作成するための計画です。
トルク変化計画 回転速度指令値を固定して、トルク指令値を台形のパターンで計画します。
計画
定常モデルに状態量を入力可能にする拡大定常モデルを作成するための計画です。
回転トルク変化計画 状態量モデルを利用して、自動で運転パターンを生成します。
ORANGE Optimizer
機能名 仕様 備考
テキストファイル(.txt)、CSVファイル(.csv)、TSVファイル(.tsv)、Microsoft Excelワークブック(.xlsx)、
データインポート 実験データ ORANGE Navigator出力ファイル(.Zip)
項目数: 最大1024、データ点数: 最大1000万点
モデルエクスポート ECUモニタとの通信機能: ASAM-MCD-3MC
補間手法: 格子補間、AKIMA補間、三角メッシュ
その他
定常適合
手法 次数 設計変数 備考
多項式モデル 最大5次 最大10 物理現象にあわせて、最大5次までの応答曲面を作成することができます。
RBFモデル - 最大10 ガウス関数を重ね合わせることにより多峰性のある応答曲面を作成することができます。
定常モデル 領域分割モデル - 最大10 設計空間を小領域に分割し、小領域を1次、または2次多項式モデルで近似した後に接続することによって、
変曲点のある応答曲面を作成することができます
ロバストモデル - - 多項式モデル、RBFモデル、領域分割モデル作成時に、目的変数のロバスト性もモデル化することが可能です。
ロバスト性を目的変数に設定することが可能です。
バウンダリーモデル - - 限界点探索運転で得られた限界点で境界モデルを作成します。境界内で最適値を得ることができます。
手法 目的変数 制約変数 備考
単一GA 1 最大9 単一目的最適化にGAを利用して実行します。
ローカル
定常 多目的GA 2~10 - 自然淘汰のシミュレーションを多目的最適化に適用し、パレート最適解集合を求める手法です。
最適化 Σ多目的GA 2~10 - ローカルパレート解の中から最適な会の組み合わせを求めることができます。
グローバル 走行シミュレーション最適化 2~10 - ローカルパレート解の中から、モード運転のシミュレーション結果最適になる会の組み合わせを求めることができます。
グローバル最適値の選択時、ECUマップの滑らかさを指標とした最適化探索が実行できます。
過渡適合オプション
遅れモデル - - むだ時間や一次遅れをモデル化します。
過渡モデル 拡大定常モデル - - 定常モデルに状態量を入力可能にしたモデルです。
結合モデ ル - - 定常モデル、遅れモデル、外部(MATLAB)モデル)を組み合わせてエンジンの複雑な挙動をモデル化することができます。
手法 目的変数 制約変数 備考
過渡
最適化 グローバル 走行シミュレーション最適化 2~10 -
各モデルを組み合わせた過渡シミュレーションモデルを使って、過渡状態の最適化を行います。評価パターンを任意に設定することで、
法規モードに対応した最適値を演算することや、運転領域全体を最適化することが可能です。
※Microsoft® Windows® は米国Microsoft Corporationの米国およびその他の国における登録商標です。 その他記載されている会社名、 製品名は各社の商標または登録商標です。
お客様へのお願い 当社製品(役務を含む)を輸出または国外へ持出す際の注意について
当社製品(役務を含む)を輸出または国外へ持出す場合は、外為法(外国為替及び外国貿易法)の規定により、リスト規制該当品であれば、経済産業大臣へ輸出許可申請の手続きを
行ってください。また非該当品であれば、通関上何らかの書類が必要となります。尚、非該当品であってもキャッチオール規制に該当する場合は、経済産業大臣へ輸出許可申請が必要と
なります。お問い合わせは、当社の最寄りの営業所または当社輸出管理担当窓口(電話045-476-9707)までご連絡ください。
●記載事項は変更になる場合がありますので、ご注文の際はご確認ください。 注意 ●機器を正しく安全にお使いいただくために、ご使用前に必ず「取扱説明書」をよくお読みください。
●代理店・販売店
〒222-8507 神奈川県横浜市港北区新横浜3‒9‒3 TEL(. 045)935‒3888
お客様相談室 フリーダイヤル 0120-388841
受付時間 : 9:00~12:00/13:00~18:00(土・日・祝日を除く)
北 関 東(028)684‒2400 浜 松(053)462‒5611 広 島(082)246‒1777
埼 玉(048)474‒8311 ト ヨ タ(0565)31‒1779 九 州(092)432‒2335
首 都 圏(045)935‒3838 中 部(0565)41‒3551 海 外(045)935‒3918
沼 津(055)988‒3738 関 西(06)6386‒3141
ホームページアドレス https://www.onosokki.co.jp/
E‒mailアドレス webinfo@onosokki.co.jp
CAT.NO. 1426-06 Printed in Japan(U) 206( OKI) '20.6月改訂