



プログラムのダウンロード・アップロードや入出力操作方法・電源供給・逆起電力・モータとの通信方法・トルクカーブの詳細等をわかりやすく掲載いたしました。
スマートモータについてもっと知りたい方、実際にお使いになられる方へQ&A【応用編】をご用意しました。
#サーボモータ,#小型サーボモータ,#ドライバ一体型モータ,#ブラシレスDCモータ,#Animatics,#アニマティクス,#スマートモータ,#ドライバ内蔵,#見える化
このカタログについて
| ドキュメント名 | スマートモータ Q&A【応用編】 |
|---|---|
| ドキュメント種別 | ハンドブック |
| ファイルサイズ | 1.6Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 日本ムーグ株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
スマートモータ™ Q&A
応用編
プログラムのダウンロードとアップロード
なぜSMI3(無償 専用ソフト)はプログラム実行中のスマートモータ本体にプログラムをダウンロードさせないのですか?
安全上、SMI3は予期せぬ動作を未然に防ぐため、ダウンロード前に動作中のスマートモータ本体の保持電流を落とすか、実行中のプログラム
を止めるように求めます。たとえば、速度モードあるいはトルクモードに設定するプログラムを、モータを止めずにそのプログラムをダウンロード
すると、ダウンロード最中に回転しながら終端に衝突することになります。安全運用のため、スマートモータ本体をオフにしてください。
ダウンロードを開始すると、なぜモータはすべての動作を止めてしまうのですか?
SMI3が新たなプログラムをダウンロードする際、前もって入力されたコードによる実行を止めるため、ENDコマンドを出力します。EEPROMヘ
ッダー部分が再書き込みされている間に、メモリーポインターエラーを防ぐためのもので、これも安全対策です。
許可ユーザ以外がプログラムをアップロードしないように防ぐことはできますか?
可能です。シリアルポートを通じて、モータにLOCKPコマンドを送ることによって、許可ユーザ以外はプログラムを見たり、コピーをすることが出
来なくなります。LOCKPコマンドはプログラムをロックする手段ですので、新しいプログラムをダウンロードすることは出来ますが、許可ユーザ
以外はダウンロードしたプログラムを見ることは出来ません。
入出力(I/O)操作
モータのI/Oは絶縁されていない5V TTLですが、24VDC I/Oへのオプションはありますか?
Class5 Dスタイルの場合は2通りのオプションを用意しております。
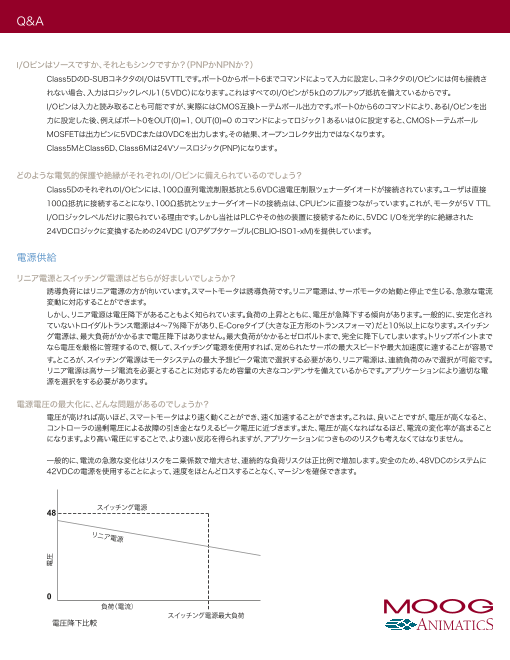
コネクタフードの中に、5Vから24Vへの絶縁ロジック回路を内蔵したケーブルを提供しています。24VDCの7点のI/Oに対して、入力4点と出力
3点か、入力5点と出力2点の組み合わせが選択できます。シンクにもソースにも設定可能です。部品番号はCBLIO-ISO1-xMで、3m・5m・10m
の長さで購入可能です。もう一つがシャフトの反負荷側に10点の入出力を追加できるオプション(AD1オプション)です。ロジックは24Vソース
(PNP)です。
Class6 Dスタイルは10点の24Vソース(PNP)と1点のアナログ入力(4-20mA)があります。I/O追加オプションは準備していません。
CBLIO-ISO1-xM
KITUSB232485
CBLSM1-xM 584232BSU B
PS24V8AG-110
CBLIP-CAN-FL-xMRA (5 Pin) or PS42V6AG-110
SM23165D-C-AD1
CBLIP-IO-FL-xMRA (12 Pin)
www.moog.co.jp
Page2
Q&A
I/Oピンはソースですか、それともシンクですか?(PNPかNPNか?)
Class5DのD-SUBコネクタのI/Oは5VTTLです。ポート0からポート6までコマンドによって入力に設定し、コネクタのI/Oピンには何も接続さ
れない場合、入力はロジックレベル1(5VDC)になります。これはすべてのI/Oピンが5kΩのプルアップ抵抗を備えているからです。
I/Oピンは入力と読み取ることも可能ですが、実際にはCMOS互換トーテムポール出力です。ポート0から6のコマンドにより、あるI/Oピンを出
力に設定した後、例えばポート0をOUT(0)=1, OUT(0)=0 のコマンドによってロジック1あるいは0に設定すると、CMOSトーテムポール
MOSFETは出力ピンに5VDCまたは0VDCを出力します。その結果、オープンコレクタ出力ではなくなります。
Class5MとClass6D、Class6Mは24Vソースロジック(PNP)になります。
どのような電気的保護や絶縁がそれぞれのI/Oピンに備えられているのでしょう?
Class5DのそれぞれのI/Oピンには、100Ω直列電流制限抵抗と5.6VDC過電圧制限ツェナーダイオードが接続されています。ユーザは直接
100Ω抵抗に接続することになり、100Ω抵抗とツェナーダイオードの接続点は、CPUピンに直接つながっています。これが、モータが5V TTL
I/Oロジックレベルだけに限られている理由です。しかし当社はPLCやその他の装置に接続するために、5VDC I/Oを光学的に絶縁された
24VDCロジックに変換するための24VDC I/Oアダプタケーブル(CBLIO-ISO1-xM)を提供しています。
電源供給
リニア電源とスイッチング電源はどちらが好ましいでしょうか?
誘導負荷にはリニア電源の方が向いています。スマートモータは誘導負荷です。リニア電源は、サーボモータの始動と停止で生じる、急激な電流
変動に対応することができます。
しかし、リニア電源は電圧降下があることもよく知られています。負荷の上昇とともに、電圧が急降下する傾向があります。一般的に、安定化され
ていないトロイダルトランス電源は4~7%降下があり、E-Coreタイプ(大きな正方形のトランスフォーマ)だと10%以上になります。スイッチン
グ電源は、最大負荷がかかるまで電圧降下はありません。最大負荷がかかるとゼロボルトまで、完全に降下してしまいます。トリップポイントまで
なら電圧を厳格に管理するので、概して、スイッチング電源を使用すれば、定められたサーボの最大スピードや最大加速度に達することが容易で
す。ところが、スイッチング電源はモータシステムの最大予想ピーク電流で選択する必要があり、リニア電源は、連続負荷のみで選択が可能です。
リニア電源は高サージ電流を必要とすることに対応するため容量の大きなコンデンサを備えているからです。アプリケーションにより適切な電
源を選択をする必要があります。
電源電圧の最大化に、どんな問題があるのでしょうか?
電圧が高ければ高いほど、スマートモータはより速く動くことができ、速く加速することができます。これは、良いことですが、電圧が高くなると、
コントローラの過剰電圧による故障の引き金となりえるピーク電圧に近づきます。また、電圧が高くなればなるほど、電流の変化率が高まること
になります。より高い電圧にすることで、より速い反応を得られますが、アプリケーションにつきもののリスクも考えなくてはなりません。
一般的に、電流の急激な変化はリスクを二乗係数で増大させ、連続的な負荷リスクは正比例で増加します。安全のため、48VDCのシステムに
42VDCの電源を使用することによって、速度をほとんどロスすることなく、マージンを確保できます。
48 スイッチング電源
リニア電源
0
負荷(電流)
スイッチング電源最大負荷
電圧降下比較
電圧
Page3
Q&A
どのように電源サイズを選択すれば良いですか?
大きいほうが良いと言えます。
まず、アプリケーションに合うスマートモータを選択したかどうか、確認してください。確認が終了したら、そのモータの電力定格を調べ、10%以
上の電力を供給できるリニア電源を選ぶことによって、より長い持続電流負荷をかけることができます。概して、どのようなリニア電源でも十分な
ピーク電流を得ることができます。この点、スイッチング電源では定格電圧や定格電流に制限されるので、選び方が難しくなります。
例:48VDC・6アンペアのスイッチング電源
48VDCにおいて6アンペアまでしか供給できないという意味で、6アンペアを超えた電流が流れた場合、電源は0VDCまで降下し、大抵の場合
リセットされます。スイッチング電源を使用する際は、モータの予想ピーク負荷を確認してスイッチング電源の連続定格を決め、トラブル防止に
努める必要があります。
目安として、23フレームのClass5モータ(型番SM23xxx)には、瞬間的に12アンペアくらいの電流が流れることもありますが、通常9アンペア
以下ですので、10アンペアのスイッチング電源であれば、大抵のアプリケーションで動作させることができます。
34フレームのClass5モータ(型番:SM34xxx)では、20アンペアの連続定格が必要になりますが、瞬間的には40アンペアもしくはそれ以上が
2~3ミリ秒間に流れることもあります。よって、特にスイッチング電源は「大きいほうがよい」ことになります。
逆起電力
逆起電力に対してどのような対策をすればよいのでしょう?
最も有効な対策は当社のシャント抵抗を使用することです。これは、バス電圧が49.5VDCを超えると100Wの負荷へ落とし、48.5VDCより下
がると元に戻します。
無負荷電圧が48VDCを超えていなければ、スイッチング電源、あるいはリニア電源と利用することが可能です。49.5VDCを超えると、シャント
は常にオンの状態になってしまいます。
逆起電力とは何ですか?どうして起こるのですか?
モータから生じる電圧のことです。モータが発電機として働いているのです。逆起電力は速度に比例するということは一般的によく知られていま
すが、これは、等速のときだけに当てはまります。実際には、モータのステータ巻き線の内部にある磁束(磁界強度)の変化率に比例しています。
この変化率が大きければ大きいほど、電圧は高く生じます。言い換えると、モータシャフトは、高い電圧を作り出すために、速く回る必要はありま
せん。
過電圧エラーが発生しました。バックドライブもしていないし高速で動かしてもいません...
衝突停止の可能性が考えられます。
衝突停止によるスマートモータ及びコントローラへのダメージを防ぐ最良の方法は、オーバートラベルスイッチを設置し、衝突停止する前にモ
ータを切ることです。これ以上の良い方法は、まず第1に衝突停止の原因を作らないことになります。
もし、衝突停止の原因がスマートモータを速度モードでジョグ動作中に適切なタイミングでジョグスイッチを切り替えられないことによるのな
ら、位置モードに変更し、ジョグスイッチをリリースしたときにインテグレートモータを停止する”X(” 減速停止)または”S(” 急速停止)コマンドを
送るようにしてください。とにかく、通常のスピードと負荷条件下で使用している間は、意図するにせよしないにせよ衝突停止をしないように注意
を払ってください。
シャント抵抗 オープンフレーム型 シャント抵抗 フレーム型
Page4
Q&A
通信
モータと通信できません。どうすればよいですか?
CPUがロックアップしているか、シリアル通信を妨害するプログラムを意図せずに書いてダウンロードしている可能性があります。もし電源を入
れLEDが1個以上点灯しているなら、次のことを試してください:モータ単体を切り離します。モータ電源・通信ケーブル1本でモータをPCのシリ
アルポートに接続しますが、このときClass4モータの電源は入れないようにしてください。つまり、電源を接続しないかオフにしてください。それ
からSMIソフトウェアを起動して、ドロップダウンメニューから通信(C)もしくはCommunicationをクリックしてください。
通信(C)/Communicationの下で”Communications Lock-up Recovery”をクリックします。ポップアップウィンドウが上記で述べたことを
実施するようお知らせします。そこで”Continue”をクリックします。するとロックアップリカバリユーティリティが複数の”E”キャラクタをモータ
に送信し、モータの電源を入れるようお知らせします。
その後、約1秒待ってから通信の確立を試みます。通信が確立されるとそのことをお知らせし、プログラムをクリアするかアップロードするかのど
ちらか一方を行うよう指示します。この時点で、モータをリセットして通常の通信を再確立するためにEEPROMをクリアすることをお薦めしま
す。このようにして単なるプログラムの問題なのかハードウェアの問題なのかを知ることができます。
もし電源を入れモータのLEDが1個も点灯しないならば、そのときは電気的な部分に問題があることが考えられます。修理のためにモータを代
理店へご返却下さい。
ときどき通信が切れてしまい、その理由が分かりません。何が原因なのでしょうか?
以下の一般的な事項を検討して下さい:
良い信号品質を保証するために、シールドとグラウンドが適切にとられていなければなりません。長い文字列(Long Character Strings)の送
信は避けてください。受信バッファは16バイト長です。RS-232やRS-485のグラウンドレファレンスとしてシールド線を決して使用しないで下さ
い。終端文字がない文字列が送信されないよう確認して下さい。文字列の後に改行やスペース文字が続いていない場合、モータは終端文字を
受け取るまでいつまでもハングアップし続けます。ダウンロードされたプログラムを実行するよりも、シリアルポートが優先であるためにこのよう
になっています。
RS-232やRS-485はどのくらい遠くへ伝送されますか?
RS-232とRS-485仕様の「RS」は「Recommended Standard(推奨標準)」を意味します。すべての会社やチップメーカが実際にその”RS”を
満足しているわけではありません。
IEEE仕様では、RS-232シングルエンド(グラウンドを基準に1本の信号線の電圧レベルでデータを伝送する形式の)信号はロジック0からロジ
ック1まで+/-12VDCまたは24VDCの電圧変化があるべきとされています。RS-485の仕様は+/-5VDC差動(「+」と「-」の2本の信号線の電
位差でデータを転送する方式)となっています。電圧レベルに基づくと、RS-232の方がより遠くへ信号を伝送することが理論上可能です。ノイズ
イミュニティ(ノイズ耐性)に基づけば、差動信号(RS-485)の方が目的地までよりクリアな状態で届きます。さまざまな条件が考慮されなけれ
ばなりませんが、一般の用途による伝送距離は、RS-232では10m、RS-485では300mとしています。ただし、RS-232で70m以上の伝送距離
が得られたこともあります。
コンビトロニック通信とは?
Moog Animaticsが開発した簡単に多軸制御でき、信頼性の高い通信方式です。スマートモータのコントローラはマスタコントローラとして機
能するので、多軸用制御専用ボードを必要としません。全モータ(コントローラ)は全ての情報をお互い共有することが出来るため、強力なパラレ
ル処理が可能なシステムとなります。CANopneとコンビトロニック通信の同時通信ができます。
Page5
Q&A
トルクカーブ
各トルクカーブは全領域の連続トルクとピークトルクの限界を示しています。
ピークトルクカーブ
ピークトルクカーブはダイナモメータにより計測され、ドライバの部品を保護するためのピーク電流リミットを示しています。
連続トルクカーブ
連続トルクカーブもダイナモメータにより計測されていますが、周囲温度25℃の時にモータが限界温度まで上昇する点を示しています。
例えば、モータをダイナモメータに接続し、1,000rpmで連続運転させ、限界温度に達するまでゆっくり負荷を増やします。この限界温度は
Class5とClass6Mで85℃です。
連続トルクカーブのゼロトルク点は電源電圧による限界点です。この点では逆起電力により速度が上がらなくなります。電源電圧を高くすれば
ゼロトルク点は右方向にシフトします。
Class6Dの限界温度は100度になっているので、Class5Dモータと比較して連続トルクが高くなっています。
周囲温度によるトルクカーブとモータレスポンス
モータが25℃より高い周囲温度で動作する場合は、同じ負荷に対して限界温度に早く到達し、連続トルクの限界も低くなります。
よって、モータのトルクカーブは周囲温度が85℃へ高くなるに従って直線的に低くなります。
(Class6Dの場合は周囲温度が100度へ高くなるにしたがって直線的にトルクカーブが低くなります。)
電源電圧によるトルクカーブとモータレスポンス
より高い電圧はトルクカーブを右方向へシフトすると共にドライバにより大きな電流を供給します。
例えば、電源電圧を2倍にすると、モータも2倍の速度を持続することが可能になり、加速は速度の微分なので、4倍の加速を達成することがで
きます。高速インデックスや高速スタート/ストップに有効です。カタログには48VDC, 42VDC, 24VDCのトルクカーブを記載しています。
カタログ中の全てのトルクカーブにはシャフト出力カーブも併記しています。
モータ出力は下記の方程式により導き出されます:
モータ出力(kW) = トルク (Nm) x 速度 (rpm) / 9.5488
モータで駆動する機構システムでは、モータを最適動作範囲内で使用することが理想的です。次に挙げる部品を調整することで適正な機構シス
テムを設計することが可能です。
ピークトルク
最適動作範囲
ピーク出力
連続トルク
力
出
続
連
速度(rpm)
トルク( Nm)
出力(Wat ts)
Page6
Q&A
トルクカーブによる適切なモータサイズの選択をするにはどうするのですか?
モータは、各モデルにおいてそのパフォーマンスに最大±10%の差異が生じる場合があります。
下図の例にはダイナモメータにより計測されたデータポイントが示され、これらのデータポイントから適正トルクカーブが描かれることになりま
す。しかし、アニマティクス社では、最も悪いデータポイントから少なくとも5%低い点を結んだ曲線を描き、それをカタログ値として公表していま
す。従いまして、実際のモータのパフォーマンスは、カタログ値より少なくとも5%以上、場合によっては20%以上良いことがあります。
トルクカーブ上の4つの負荷ケース
①. 理想的です。負荷がモータの通常動作範囲内にあり、モータは長期間問題なく動作すると期待できます。
②. 負荷がモータの公表トルクカーブにとても近い場所にあります。モータは①と比較して発熱により温かくなることが考えられますが、問題はあ
りません。
③. 負荷がモータの公表トルクカーブを超過しており、さらにパフォーマンス値のばらつき上限近くにあります。この場合は温度超過エラーか、負荷
に必要な出力が十分得られないために位置偏差エラーとなることが考えられます。
④. 負荷がモータの公表トルクカーブを超過していますが、ばらついたデータポイントの範囲内にあります。モータによっては正常に動作したり、し
ない場合が考えられます。
負荷トルクを計算し、アプリケーションで使用する適正モデルのモータを選択することは重要です。適切な負荷計算によるモデル選択をせず
に、1台によるモータテストで同モデルのモータ全てが他の同設計の機械で問題なく動作するとは考えないで下さい。
信頼性ある長寿命動作を確保するためには、動作条件を公表トルクカーブ以下に設定して下さい。
3 ダイナモメータに
よ
4 る
計
2 測
値
公表ト
1 ルクカ
ー
ブ
速度 (rpm)
トルク(Nm)
Page7
Q&A
慣性モーメント
適切なモータサイズを選択するためには、基本的な慣性モーメントの理解が必要です。トルクカーブの静止点も重要ですが、大きな加速度の動
的負荷も同時に考慮する必要があります。物体の慣性質量は速度変化に対する抵抗量です。
物体の慣性モーメントは回転の基準点におけるもので、それは旋回軸もしくは回転軸になります。
慣性モーメントは、物体の回転しにくさを表し、回転速度の変化に対する抵抗量と考えられます。
リニアシステムでは、加速度は加える力に比例します。質量が2倍になると、同じ加速度を維持するためには2倍の力が必要になります。同様に、
回転システムでは、負荷の角加速度は加えるトルクに比例します。慣性モーメントが2倍になると、同じ角加速度を維持するためには2倍のトルク
が必要です。慣性モーメントは角速度変化に対する負荷の抵抗量であり、加速や減速させるための必要トルクを表すことになります。
モータと負荷の整合
アニマティクス社製モータを使用する場合、負荷はモータロータの慣性モーメントの10倍以下にすることを目安として下さい。これを出発点と
して、広範囲のアプリケーションでモータの安全なサイズ決めを行うことができます。
負荷を加速・減速させる場合、回転している負荷は同じ速度を維持しようとするので、モータには負荷の慣性モーメントより十分大きなトルクが
必要になります。
また、回転速度を変更するには、速度を維持するより大きなトルクが必要になります。
同様に、モータが負荷を減速させる場合、負荷の慣性モーメントはモータ速度を維持しようとしますので、事実上モータをバックドライブするこ
とになり、発電機として働きます。
最悪の場合は、過電圧を引き起こして駆動部に損傷を与えることになりますので注意が必要です。
モータ-負荷間の慣性モーメント比率の改善
モータに減速機を付加することによって、バックドライブを防止すると共に、負荷の加速が向上します。
減速機のギア比を変えると、それに比例して速度と静止トルクが変わりますが、加速度と動的トルクはギア比の2乗に比例して変わります。
つまり、モータ-と負荷間の慣性モーメント比率をギア比の2乗の割合で軽減することができます。
その結果、負荷の加速と減速は大きく改善され、システム全体を損傷から保護することにもなります。
日本ムーグ株式会社
〒254-0019
神奈川県平塚市西真土1-8-37
Email : mcg.japan@moog.com
Web : www.moog.co.jp