


現在は、準自動運転/完全自動運転の実現に向けて自動車の電動化が進められている状況にあります。
自動運転車では、電動パワー・ステアリング(EPS:Electrical Power Steering) や電動ブレーキ・システムが使用されます。
これらは、高い安全性/信頼性で制御されることを保証するために、所定の安全規格を満たさなければなりません。
アナログ・デバイセズは、EPSや電動ブレーキ・システム で使用されるブラシレス・モータ向けに、磁気抵抗(MR: Magneto Resistive)方式の位置センサー(角度センサー)とシャント・ベースの電流検出アンプを提供しています。
これらを使用すれば、モータにおける高性能な転流と安全な動作を実現することができます。
◆詳しくは資料をダウンロードしてご確認ください
このカタログについて
| ドキュメント名 | 【技術資料】安全性を最重視する モータ・アプリケーション向けのデュアル AMR 角度センサー |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| ファイルサイズ | 627Kb |
| 取り扱い企業 | アナログ・デバイセズ株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
Vol 53 No 4, November 2019
安全性を最重視する
モータ・アプリケーション向けの
デュアルAMR角度センサー
著者:Enda Nicholl、戦略的マーケティング・マネージャ
概要 キの操作をアクチュエータに置き換えると、ドライバーからセン
現在は、準自動運転/完全自動運転の実現に向けて自動車の サーやECU、電動アクチュエータに責任が移行します。こうし
電動化が進められている状況にあります。自動運転車では、電 た傾向により、更に高い信頼性と性能を備える電動アクチュエー
動パワー・ステアリング(EPS:Electrical Power Steering) タの実現が喚起されていると言えます。そうしたアクチュエータ
や電動ブレーキ・システムが使用されます。これらは、高い安 は、よりインテリジェントで、なおかつ冗長性を備えているもの
全性/信頼性で制御されることを保証するために、所定の安 でなければなりません。また、リスクを基準とする安全規格であ
全規格を満たさなければなりません。 るISO 26262に準拠している必要があります。同規格では、危
険な操作状況によって生じるリスクを定性的に評価しています。
アナログ・デバイセズは、EPSや電動ブレーキ・システム その上で、安全性を確保するためにコンポーネントやシステムが
で使用されるブラシレス・モータ向けに、磁気抵抗(MR: 満たすべき基準が定められています。この規格に準拠することで、
Magneto Resistive)方式の位置センサー(角度センサー)と システマチックな故障を回避または制御することができます。加
シャント・ベースの電流検出アンプを提供しています。これら えて、ハードウェアのランダムな故障を検出または制御するか、
を使用すれば、モータにおける高性能な転流と安全な動作を その影響を軽減することが可能になります。一般に、電動アク
実現することができます。 チュエータ・システムでは、ブラシレスDC(BLDC)モータが使
はじめに 用されます。安全性を最重視するためには、システムがASIL Dに準拠するようにハードウェアとソフトウェアを設計しなければ
自動車の安全性に対しては、より高い注目が集まるようになって なりません。なお、ASIL(Automotive Safety Integrity Level)
います。従来は、ドライバーと同乗者の安全を確保するための とは、自動車の安全水準のことです。ASIL Dは最高レベルの安
主な手段としてエアバッグが使われていました。つまり、受動 全度を表します。
型のシステムに頼っていたということです。最近では、それを
補完する能動型のシステムとして、ADAS(Advanced Driver
Assistance System:先進運転支援システム)が導入されるよう BLDCモータの転流と制御
になりました。そうした新たなシステムは、安全を最重視すると BLDCモータには、その名前が示すとおりブラシが存在しません。
いう考え方に即したものです。当初は、ドライバーが行う操作に 言い換えると、ブラシと整流子の接触が発生しません。固定子(ス
ついての意思決定を支援することを目的としていましたが、長期 テータ)と回転子(ロータ)の相対位置を計測し、適切なステー
的には、ドライバーに代わってシステムにより意思決定が行われ タ・コイルにエネルギーを供給するシーケンスを保証するために
るようになることを目指しています。また、このような技術の進 は、モータ用の位置センサー(MPS:Motor Position Sensor)
歩により、準自動運転/完全自動運転の実現に向けた道が拓かれ が必要になります。特に、逆起電力が利用できず、マイクロコン
つつあります。ドライバーによる意思決定をECU(電子制御ユ トローラによってロータとステータの相対位置を判断することが
ニット)に委譲し、自動車のハンドル(ステアリング)とブレー できない始動時には、MPSの存在が不可欠です。
VISIT ANALOG.COM/JP
Page2
ゲート・ ゲート・
ドライバ ホール・ ドライバ
スイッチ
マイクロ マイクロ
コントローラ コントローラ
(a) (b)
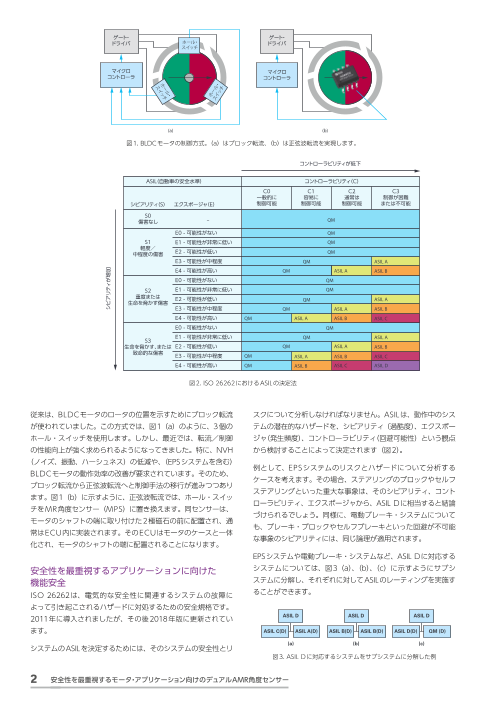
図1. BLDCモータの制御方式。(a)はブロック転流、(b)は正弦波転流を実現します。
コントローラビリティが低下
ASI(L 自動車の安全水準) コントローラビリティ(C)
C0 C1 C2 C3
一般的に 容易に 通常は 制御が困難
シビアリティ(S) エクスポージャ(E) 制御可能 制御可能 制御可能 または不可能
S0
傷害なし ‒ QM
E0 - 可能性がない QM
S1 E1 - 可能性が非常に低い QM
軽度/
中程度の傷害 E2 - 可能性が低い QM
E3 - 可能性が中程度 QM ASIL A
E4 - 可能性が高い QM ASIL A ASIL B
E0 - 可能性がない QM
S2 E1 - 可能性が非常に低い QM
重度または
生命を脅かす傷害 E2 - 可能性が低い QM ASIL A
E3 - 可能性が中程度 QM ASIL A ASIL B
E4 - 可能性が高い QM ASIL A ASIL B ASIL C
E0 - 可能性がない QM
S3 E1 - 可能性が非常に低い QM ASIL A
生命を脅かす、または E2 - 可能性が低い QM ASIL A ASIL B
致命的な傷害 E3 - 可能性が中程度 QM ASIL A ASIL B ASIL C
E4 - 可能性が高い QM ASIL B ASIL C ASIL D
図2. ISO 26262におけるASILの決定法
従来は、BLDCモータのロータの位置を示すためにブロック転流 スクについて分析しなければなりません。ASILは、動作中のシス
が使われていました。この方式では、図1(a)のように、3個の テムの潜在的なハザードを、シビアリティ(過酷度)、エクスポー
ホール・スイッチを使用します。しかし、最近では、転流/制御 ジャ(発生頻度)、コントローラビリティ(回避可能性)という観点
の性能向上が強く求められるようになってきました。特に、NVH から検討することによって決定されます(図2)。
(ノイズ、振動、ハーシュネス)の低減や、(EPSシステムを含む)
例として、EPSシステムのリスクとハザードについて分析する
BLDCモータの動作効率の改善が要求されています。そのため、
ケースを考えます。その場合、ステアリングのブロックやセルフ
ブロック転流から正弦波転流へと制御手法の移行が進みつつあり
ステアリングといった重大な事象は、そのシビアリティ、コント
ます。図1(b)に示すように、正弦波転流では、ホール・スイッ
ローラビリティ、エクスポージャから、ASIL Dに相当すると結論
チをMR角度センサー(MPS)に置き換えます。同センサーは、
づけられるでしょう。同様に、電動ブレーキ・システムについて
モータのシャフトの端に取り付けた2極磁石の前に配置され、通
も、ブレーキ・ブロックやセルフブレーキといった回避が不可能
常はECU内に実装されます。そのECUはモータのケースと一体
な事象のシビアリティには、同じ論理が適用されます。
化され、モータのシャフトの端に配置されることになります。
EPSシステムや電動ブレーキ・システムなど、ASIL Dに対応する
安全性を最重視するアプリケーションに向けた システムについては、図3(a)、(b)、(c)に示すようにサブシ
機能安全 ステムに分解し、それぞれに対してASILのレーティングを実施す
ISO 26262は、電気的な安全性に関連するシステムの故障に ることができます。
よって引き起こされるハザードに対処するための安全規格です。
2011年に導入されましたが、その後2018年版に更新されてい ASIL D ASIL D ASIL D
ます。 ASIL C(D) ASIL A(D) ASIL B(D) ASIL B(D) ASIL D(D) QM (D)
(a) (b) (c)
システムのASILを決定するためには、そのシステムの安全性とリ
図3. ASIL Dに対応するシステムをサブシステムに分解した例
2 安全性を最重視するモータ・アプリケーション向けのデュアルAMR角度センサー
シビアリティが増加
ホ
ス ーイ ルッ ・チ
ル・
ホーイッ
チ
ス
Page3
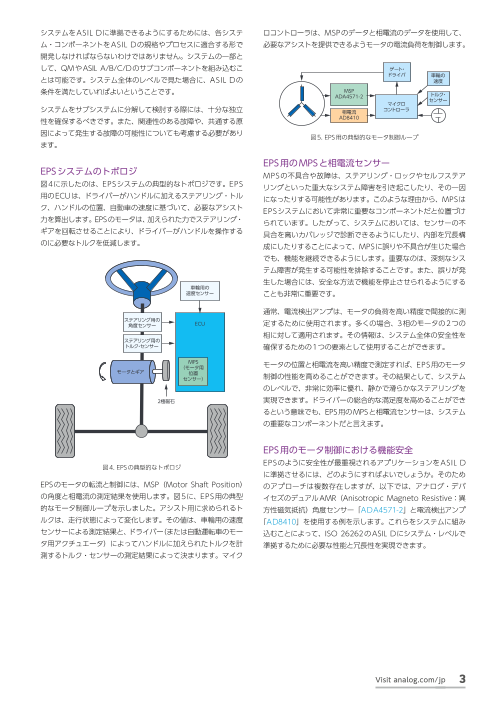
システムをASIL Dに準拠できるようにするためには、各システ ロコントローラは、MSPのデータと相電流のデータを使用して、
ム・コンポーネントをASIL Dの規格やプロセスに適合する形で 必要なアシストを提供できるようモータの電流負荷を制御します。
開発しなければならないわけではありません。システムの一部と
して、QMやASIL A/B/C/Dのサブコンポーネントを組み込むこ ゲート・
ドライバ
とは可能です。システム全体のレベルで見た場合に、ASIL Dの 車輪の速度
条件を満たしていればよいということです。 MSP
ADA4571-2 トルク・
マイクロ センサー
システムをサブシステムに分解して検討する際には、十分な独立 相電流 コントローラ
性を確保するべきです。また、関連性のある故障や、共通する原 AD8410
因によって発生する故障の可能性についても考慮する必要があり 図5. EPS用の典型的なモータ制御ループ
ます。
EPS用のMPSと相電流センサー
EPSシステムのトポロジ MPSの不具合や故障は、ステアリング・ロックやセルフステア
図4に示したのは、EPSシステムの典型的なトポロジです。EPS リングといった重大なシステム障害を引き起こしたり、その一因
用のECUは、ドライバーがハンドルに加えるステアリング・トル になったりする可能性があります。このような理由から、MPSは
ク、ハンドルの位置、自動車の速度に基づいて、必要なアシスト EPSシステムにおいて非常に重要なコンポーネントだと位置づけ
力を算出します。EPSのモータは、加えられた力でステアリング・ られています。したがって、システムにおいては、センサーの不
ギアを回転させることにより、ドライバーがハンドルを操作する 具合を高いカバレッジで診断できるようにしたり、内部を冗長構
のに必要なトルクを低減します。 成にしたりすることによって、MPSに誤りや不具合が生じた場合
でも、機能を継続できるようにします。重要なのは、深刻なシス
テム障害が発生する可能性を排除することです。また、誤りが発
生した場合には、安全な方法で機能を停止させられるようにする
車輪用の
速度センサー ことも非常に重要です。
通常、電流検出アンプは、モータの負荷を高い精度で間接的に測
ステアリング用の
角度センサー ECU 定するために使用されます。多くの場合、3相のモータの2つの
相に対して適用されます。その情報は、システム全体の安全性を
ステアリング用の
トルク・センサー 確保するための1つの要素として使用することができます。
MPS
(モータ用 モータの位置と相電流を高い精度で測定すれば、EPS用のモータ
モータとギア 位置
センサー) 制御の性能を高めることができます。その結果として、システム
のレベルで、非常に効率に優れ、静かで滑らかなステアリングを
2極磁石 実現できます。ドライバーの総合的な満足度を高めることができ
るという意味でも、EPS用のMPSと相電流センサーは、システム
の重要なコンポーネントだと言えます。
EPS用のモータ制御における機能安全
図4. EPSの典型的なトポロジ EPSのように安全性が最重視されるアプリケーションをASIL D
に準拠させるには、どのようにすればよいでしょうか。そのため
EPSのモータの転流と制御には、MSP(Motor Shaft Position) のアプローチは複数存在しますが、以下では、アナログ・デバ
の角度と相電流の測定結果を使用します。図5に、EPS用の典型 イセズのデュアルAMR(Anisotropic Magneto Resistive:異
的なモータ制御ループを示しました。アシスト用に求められるト 方性磁気抵抗)角度センサー「ADA4571-2」と電流検出アンプ
ルクは、走行状態によって変化します。その値は、車輪用の速度 「AD8410」を使用する例を示します。これらをシステムに組み
センサーによる測定結果と、ドライバー(または自動運転車のモー 込むことによって、ISO 26262のASIL Dにシステム・レベルで
タ用アクチュエータ)によってハンドルに加えられたトルクを計 準拠するために必要な性能と冗長性を実現できます。
測するトルク・センサーの測定結果によって決まります。マイク
Visit analog.com/jp 3
Page4
図6に、上述したシステムのブロック図を示しました。こ ます。何らの障害が発生した場合でも、システムの電源を安全な
のシステムにおいては、デュアルAMR角度センサーである 状態でオフにしたり、リンプ・ホーム・モードに移行させたりす
ADA4571-2をMPSとして使用しています。このMPSは、 ることができます。その上で、自動車の販売店に修理を依頼する
別の技術をベースとする補助センサーによって補完されてい ことになります。
ます。ここで言う別の技術としては、ホール効果や、GMR
(Giant Magneto Resistance:巨大磁気抵抗)、TMR(Tunnel まとめ
Magneto Resistance:トンネル型磁気抵抗)などが考えられま 自動車の安全性を向上するためのより高度なADASの導入と、準
す。ADA4571-2は、1次(高精度)センシング・チャンネルと 自動運転/完全自動運に対応する自動車の登場は、ほぼ同じ時期
して使用されます。別の技術を使ったセンサーは、次の3つの目 になると考えられます。そのため、より高い信頼性、インテリジェ
的を持った2次チャンネルとして機能します。 ンス、性能を備え、冗長化が実現された電動アクチュエータが強
X 他のシステム入力と組み合わせたとき、センサーのチャンネ く求められています。その電動アクチュエータは、機能安全規格
ルのうちいずれかに不具合があるかどうかを確認するために、 であるISO 26262に準拠している必要があります。アナログ・
3 チャンネルのうちの 2 チャンネル(2oo3: 2-out-of-3)を デバイセズは、効率的で滑らかなモータ制御を実現するための高
比較するプロビジョンを可能にします。 精度のMPSと相電流検出センサーを提供しています。それらの
X 可能性は低いものの、AMR 角度センサーの両方のチャンネル 製品は、EPSや電動ブレーキ・システムなど、安全性を最重視す
が機能しなくなった場合に、位置の情報をフィードバックしま るアプリケーションにおいて高いASILを達成するために必要な冗
す。 長化にも対応しています。
X モータが奇数個の極を持つ場合に、転流に必要な全象限の情 デュアルAMR角度センサーであるADA4571-2は、安全性を最
報をマイクロコントローラに提供します。 重視するアプリケーションに向けて設計されています。これを採
ADA4571-2の両方のチャンネルにより、角度の測定は高い精度 用すれば、独立した2つのチャンネルを使用して冗長化を実現で
で継続して行われます。動作状態において、モータの負荷やシャ きます。ADA4571-2は、シグナル・コンディショニング用のア
フトの位置は、高精度の電流検出アンプから得られる逆起電力の ンプとA/Dコンバータ用のドライバを内蔵した2チャンネルの製
情報により間接的に推測することができます。この推測は、追加 品です。2個のAMRセンサー(Sensitecの「AA745」)とシグナ
のシステム診断に相当します。 ル・コンディショニング用のアンプとして機能する2個のASIC
を内蔵しています。通常、角度の測定誤差は0.1°程度に抑えら
MPS れ、ヒステリシスは無視できるレベルです。帯域幅は広く、遅延
ADA4571-2 は小さく、優れた線形性が得られます。このような特性を備える
AMR ことから、リップルやノイズの小さいトルクを得ることができ、
チャンネル1
AMR BLDCモータを効率的かつ滑らかに制御することが可能になりま
チャンネル2 す。また、同製品は、30mT以上で飽和状態で動作します。磁気
補助センサー のレベルについては上限はありません。強磁界で同製品を動作さ
のチャンネル マイクロ
コントローラ せることで、図6のソリューションは、過酷な環境下に存在する
電流検出 浮遊磁界に対して高い堅牢性を示します。
AD8410
1相 電流検出アンプであるAD8410を使用すれば、EPS用のBLDC
AD8410
2相 モータ制御システムにおいて、シャント抵抗を流れる双方向の電
流を測定することができます。非常に高精度な測定が求められ
図6. MPSと相電流センサーを組み合わせたアーキテクチャ。
安全性を最重視するアプリケーションに最適です。 る厳しい条件下でも、安全性を最重視するアプリケーション向け
の診断機能を提供できるだけの性能が得られます。リップルやノ
このアーキテクチャにおいて、センサーで発生する可能性がある イズの少ないトルクを得ることが可能になるので、EPSやブレー
すべての故障モードについて考えてみます。すると、どのような キで使われるBLDCモータを効率的かつ滑らかに制御できます。
場合でも、妥当性確認(plausibility check)に利用できる位置 AD8410は、ドライバーの総合的な満足度を高めるために設計
センサーの入力が2つ存在するはずです。極端な例としては、共 された高電圧、高精度、広帯域幅に対応する製品です。
通の原因による故障でAMR角度センサーの2つのチャンネルが
同時に機能しなくなるケースも考えられます。そのような場合に 参考資料
は、補助センサーのチャンネルで測定した位置情報(精度は高く
「ISO 26262-1:2018」、International Organization for
ありません)と、動作状態において電流センサーで取得した逆起
Standardization、2018年12月
電力の情報を照合します。それにより、システムの基本機能が継
続して働くことを保証できます。 Isshi Koyata「Approach About the Fail Operational to the
Future of EPS-System in JARI Activities(JARIの取り組み:将
このようなシステム・レベルの診断機能を実現することにより、
来のEPSシステムにおけるフェイル・オペレーショナルに関する
深刻な故障モードが発生する可能性を排除できます。その結果、
アプローチ)」Japan Automobile Research Institute(JARI)、
システムをISO 26262のASIL Dに準拠させることが可能になり
2019年
4 安全性を最重視するモータ・アプリケーション向けのデュアルAMR角度センサー
Page5
著者について
Enda Nichol(l enda.nicholl@analog.com)は、アナログ・デバイセズの戦略的マーケティング・マネージャ
です。アイルランド リムリックのERDC(European Research & Development Centre)を拠点とする
自動車電動化事業部門に所属しています。アバーテイ大学で機械工学の学位を取得。25年にわたって車載
センサーを担当し、アプリケーション・エンジニアリング、戦略的マーケティング、ビジネス開発に携わっ
てきました。このうち13年間はオートモーティブ事業部門に所属していました。
©2020 Analog Devices, Inc. All rights reserved. お住いの地域の本社、販売代理店などの情報は、analog.
本紙記載の商標および登録商標は、各社の所有に属します。 com/jp/contact をご覧ください。
Ahead of What’s Possibleはアナログ・デバイセズの商標です。
オンラインサポートコミュニティEngineerZoneでは、アナ
ログ・デバイセズのエキスパートへの質問、FAQの閲覧がで
AD5311-0-11/19 きます。
VISIT ANALOG.COM/JP