



半導体技術をベースとして実現される機能や性能は、とどまることなく進化しています。それらを利用することにより、従来は計測できなかった産業用アプリケーションの各種事象をセンシング/測定/解釈/解析することが可能になりました。特に、状態基準保全(Conditional Based Maintenance / CbM)向けのソリューションでは、最新の半導体技術を導入することによって、数多くのメリットを享受できます。例えば、MEMS( Micro Electro Mechanical Systems)技術によって実現された次世代の振動センサーを、診断/予測用の高度なアルゴリズムと組み合わせたとします。そうすると、様々な機械の状態を、従来よりもはるかに的確に把握できるようになります。そのようにして装置を効果的に監視することで、ダウンタイムを削減したり、プロセスの質を改善したりすることが可能になります。その結果、スループットの向上を図ることができます。
★詳細については、記事をダウンロードしてご覧ください。
このカタログについて
| ドキュメント名 | 状態基準保全向けソリューションの性能は、振動センサーで決まる |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| ファイルサイズ | 1.2Mb |
| 登録カテゴリ | |
| 取り扱い企業 | アナログ・デバイセズ株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
Analog Dialogue 53-06、2019年6月
Share on Twitter Facebook LinkedIn Email
状態基準保全向けソリューションの性能は、
振動センサーで決まる
著者: Pete Sopcik、Dara O’Sullivan
半導体技術をベースとして実現される機能や性能は、と 特徴を示した上で、状態基準保全向けのソリューション
どまることなく進化しています。それらを利用すること を開発する際に検討しなければならない、いくつかの主
により、従来は計測できなかった産業用アプリケーショ 要な要件について解説します。
ンの各種事象をセンシング/測定/解釈/解析すること
が可能になりました。特に、状態基準保全(Condi t iona l 不均衡
Based Main tenance)向けのソリューションでは、最新
の半導体技術を導入することによって、数多くのメリ 不均衡とは何か、なぜ生じるのか?
ットを享受できます。例えば、M E M S(M i c r o E l e c t r o ここで言う不均衡(アンバランス)とは、質量の配分が
Mechanica l Sys tems)技術によって実現された次世代の 不均等な状態になることです。具体的には、負荷(ポン
振動センサーを、診断/予測用の高度なアルゴリズムと プなど)が回転の中心からずれて、質量の中心がずれた
組み合わせたとします。そうすると、様々な機械の状態 状態にあることを言います。システムの不均衡は、継手
を、従来よりもはるかに的確に把握できるようになりま の偏心、システム設計の誤り、部品の不具合、破片など
す。そのようにして装置を効果的に監視することで、ダ の異物の堆積といった不適切な状況に起因して発生しま
ウンタイムを削減したり、プロセスの質を改善したりす す。例えば、多くの誘導モータに組み込まれている冷却
ることが可能になります。その結果、スループットの向 ファンでは、粉塵や潤滑油が不均一に堆積したり、ファ
上を図ることができます。 ン・ブレードが破損したりすると、不均衡の状態に陥る
ことがあります。
では、そうしたアプローチによって新たな機能を実現し、
状態基準保全のメリットを享受するには、具体的にどの
不均衡によって何が起きるのか?
ような取り組みを行えばよいのでしょうか。それには、
機械の潜在的な不具合を検出するための基本的な機能を 不均衡が生じているシステムでは、過度の振動が発生し
設けるだけでは不十分です。強力なリアルタイム監視機 ます。その振動は、軸受(ベアリング)、継手、負荷な
能を実現し、洞察に富み、実際に役に立つ情報が得られ どシステム内の他のコンポーネントに機械的に結合しま
るようにしなければなりません。そうしたあらゆる機能 す。その結果、良好な動作状態にあるコンポーネントの
を備え、精度、堅牢性、信頼性に優れる新たなソリュー 劣化が促進される可能性があります。
ションを構築する必要があります。次世代の技術によっ
て得られる性能とシステム・レベルの洞察を組み合わせ 不均衡の検出/診断方法
ることで、深い理解に基づいて、課題の解決に必要な要 システム内の振動が増大すると、不均衡に起因する潜在
件を的確に定義し、効果的なアプリケーションを実現す 的な不具合の存在が示唆される可能性があります。振動
ることが可能になります。 が増大した根本的な原因の診断は、周波数領域の解析に
よって行われます(図1)。
機械の診断においては、振動が非常に重要な指標になり
ます。振動に関する情報は、広範な種類の産業用アプリ 25
ケーションにわたり、最も重要な装置を確実に監視する
回転速度
ことを目的として用いられています。高度な振動監視ソ
20
リューションを実現するためには、様々な診断機能や予 1× 不均衡か?
測機能が必要になります。そうした機能については、多
基本波の成分が
基準となる値と
くの文献で解説されています。しかし、帯域幅やノイズ 15 比べて増加している
密度といった振動センサーの性能パラメータと、最終的 2× 高調波
なアプリケーションの故障診断機能の関係を取り上げた 10 4×
文献はあまり存在しません。本稿では、産業用オートメ
ーションの分野でよく見られる機械の不具合の例を取り
3× 5×
上げます。それらの不具合を検出するためには、振動セ 5
ンサーの主要な性能パラメータのうち、どれが重要にな
るのかを明らかにします。 0
0 1 2 3 4 5 6 7 8 9 10
各種の機械では、様々な種類の不具合が発生します。以 周波数
降のセクションでは、それらの中でも特に一般的だと言
える4種の不具合を取り上げます。不均衡、位置ずれ、 図 1 . 振動の周波数スペクトル。基本波周波数
転がり軸受の欠陥、ギアの不良の4つです。それぞれの (回転速度に対応)における振幅の増加は、
システムが不均衡である可能性を示唆します。
analog.com/jp/analog-dialogue 1
振動の振幅
Page2
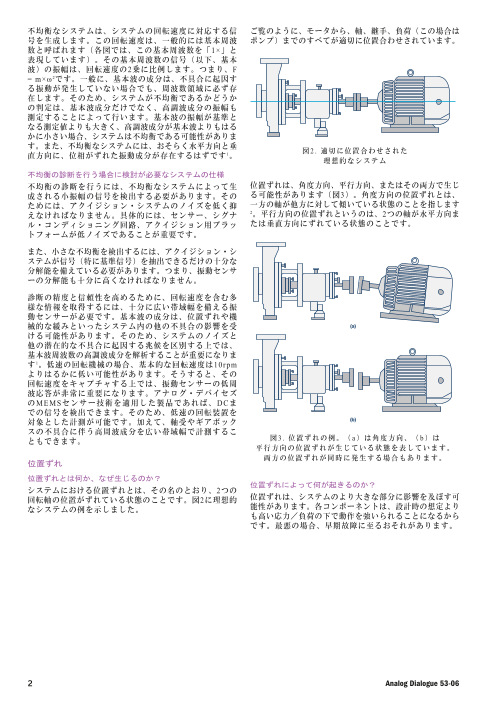
不均衡なシステムは、システムの回転速度に対応する信 ご覧のように、モータから、軸、継手、負荷(この場合は
号を生成します。この回転速度は、一般的には基本周波 ポンプ)までのすべてが適切に位置合わせされています。
数と呼ばれます(各図では、この基本周波数を「1×」と
表現しています)。その基本周波数の信号(以下、基本
波)の振幅は、回転速度の2乗に比例します。つまり、F
= m×ω 2です。一般に、基本波の成分は、不具合に起因す
る振動が発生していない場合でも、周波数領域に必ず存
在します。そのため、システムが不均衡であるかどうか
の判定は、基本波成分だけでなく、高調波成分の振幅も
測定することによって行います。基本波の振幅が基準と
なる測定値よりも大きく、高調波成分が基本波よりもはる
かに小さい場合、システムは不均衡である可能性がありま
す。また、不均衡なシステムには、おそらく水平方向と垂
直方向に、位相がずれた振動成分が存在するはずです 1
図 2 . 適切に位置合わせされた
。
理想的なシステム
不均衡の診断を行う場合に検討が必要なシステムの仕様
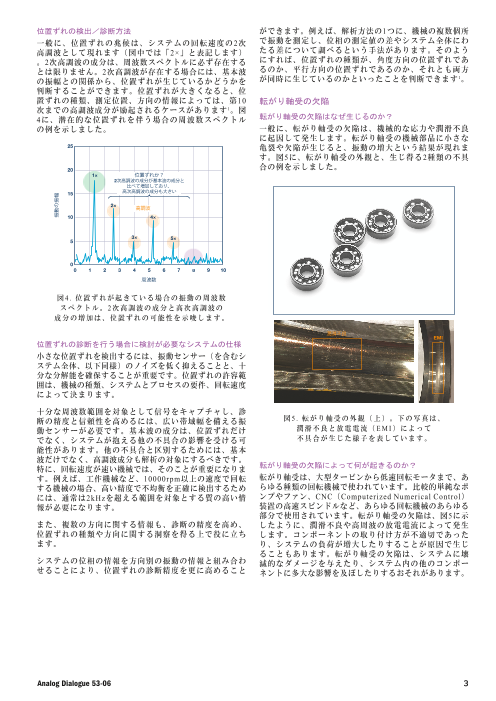
不均衡の診断を行うには、不均衡なシステムによって生 位置ずれは、角度方向、平行方向、またはその両方で生じ
成される小振幅の信号を検出する必要があります。その る可能性があります(図3)。角度方向の位置ずれとは、
ためには、アクイジション・システムのノイズを低く抑 一方の軸が他方に対して傾いている状態のことを指します
2
えなければなりません。具体的には、センサー、シグナ 。平行方向の位置ずれというのは、2つの軸が水平方向ま
ル・コンディショニング回路、アクイジション用プラッ たは垂直方向にずれている状態のことです。
トフォームが低ノイズであることが重要です。
また、小さな不均衡を検出するには、アクイジション・シ
ステムが信号(特に基準信号)を抽出できるだけの十分な
分解能を備えている必要があります。つまり、振動センサ
ーの分解能も十分に高くなければなりません。
診断の精度と信頼性を高めるために、回転速度を含む多
様な情報を取得するには、十分に広い帯域幅を備える振
動センサーが必要です。基本波の成分は、位置ずれや機
械的な緩みといったシステム内の他の不具合の影響を受 (a)
ける可能性があります。そのため、システムのノイズと
他の潜在的な不具合に起因する兆候を区別する上では、
基本波周波数の高調波成分を解析することが重要になりま
す 1。低速の回転機械の場合、基本的な回転速度は10rpm
よりはるかに低い可能性があります。そうすると、その
回転速度をキャプチャする上では、振動センサーの低周
波応答が非常に重要になります。アナログ・デバイセズ
のM E M Sセンサー技術を適用した製品であれば、D Cま
での信号を検出できます。そのため、低速の回転装置を
対象とした計測が可能です。加えて、軸受やギアボック (b)
スの不具合に伴う高周波成分を広い帯域幅で計測するこ
ともできます。 図 3 . 位置ずれの例。( a)は角度方向、( b)は
平行方向の位置ずれが生じている状態を表しています。
両方の位置ずれが同時に発生する場合もあります。
位置ずれ
位置ずれとは何か、なぜ生じるのか?
位置ずれによって何が起きるのか?
システムにおける位置ずれとは、その名のとおり、2つの
回転軸の位置がずれている状態のことです。図2に理想的 位置ずれは、システムのより大きな部分に影響を及ぼす可
なシステムの例を示しました。 能性があります。各コンポーネントは、設計時の想定より
も高い応力/負荷の下で動作を強いられることになるから
です。最悪の場合、早期故障に至るおそれがあります。
2 Analog Dialogue 53-06
Page3
位置ずれの検出/診断方法 ができます。例えば、解析方法の1つに、機械の複数個所
一般に、位置ずれの兆候は、システムの回転速度の2次 で振動を測定し、位相の測定値の差やシステム全体にわ
高調波として現れます(図中では「2×」と表記します) たる差について調べるという手法があります。そのよう
。2次高調波の成分は、周波数スペクトルに必ず存在する にすれば、位置ずれの種類が、角度方向の位置ずれであ
とは限りません。2次高調波が存在する場合には、基本波 るのか、平行方向の位置ずれであるのか、それとも両方
1
の振幅との関係から、位置ずれが生じているかどうかを が同時に生じているのかといったことを判断できます 。
判断することができます。位置ずれが大きくなると、位
置ずれの種類、測定位置、方向の情報によっては、第10 転がり軸受の欠陥
次までの高調波成分が励起されるケースがあります 1。図
4に、潜在的な位置ずれを伴う場合の周波数スペクトル 転がり軸受の欠陥はなぜ生じるのか?
の例を示しました。 一般に、転がり軸受の欠陥は、機械的な応力や潤滑不良
に起因して発生します。転がり軸受の機械部品に小さな
25 亀裂や欠陥が生じると、振動の増大という結果が現れま
す。図5に、転がり軸受の外観と、生じ得る2種類の不具
20 合の例を示しました。
1× 位置ずれか?
2次高調波の成分が基本波の成分と
比べて増加しており、
15 高次高調波の成分も大きい
2× 高調波
10 4×
3× 5×
5
0
0 1 2 3 4 5 6 7 8 9 10
周波数
図 4 . 位置ずれが起きている場合の振動の周波数
スペクトル。 2次高調波の成分と高次高調波の
成分の増加は、位置ずれの可能性を示唆します。
潤滑不良
EMI
位置ずれの診断を行う場合に検討が必要なシステムの仕様
小さな位置ずれを検出するには、振動センサー(を含むシ
ステム全体、以下同様)のノイズを低く抑えることと、十
分な分解能を確保することが重要です。位置ずれの許容範
囲は、機械の種類、システムとプロセスの要件、回転速度
によって決まります。
十分な周波数範囲を対象として信号をキャプチャし、診
断の精度と信頼性を高めるには、広い帯域幅を備える振 図 5 . 転がり軸受の外観(上)。下の写真は、
動センサーが必要です。基本波の成分は、位置ずれだけ 潤滑不良と放電電流(E M I)によって
でなく、システムが抱える他の不具合の影響を受ける可 不具合が生じた様子を表しています。
能性があります。他の不具合と区別するためには、基本
波だけでなく、高調波成分も解析の対象にするべきです。
特に、回転速度が速い機械では、そのことが重要になりま
転がり軸受の欠陥によって何が起きるのか?
す。例えば、工作機械など、10000rpm以上の速度で回転 転がり軸受は、大型タービンから低速回転モータまで、あ
する機械の場合、高い精度で不均衡を正確に検出するため らゆる種類の回転機械で使われています。比較的単純なポ
には、通常は2kHzを超える範囲を対象とする質の高い情 ンプやファン、CNC(Computerized Numerical Control)
報が必要になります。 装置の高速スピンドルなど、あらゆる回転機械のあらゆる
部分で使用されています。転がり軸受の欠陥は、図5に示
また、複数の方向に関する情報も、診断の精度を高め、 したように、潤滑不良や高周波の放電電流によって発生
位置ずれの種類や方向に関する洞察を得る上で役に立ち します。コンポーネントの取り付け方が不適切であった
ます。 り、システムの負荷が増大したりすることが原因で生じ
ることもあります。転がり軸受の欠陥は、システムに壊
システムの位相の情報を方向別の振動の情報と組み合わ 滅的なダメージを与えたり、システム内の他のコンポー
せることにより、位置ずれの診断精度を更に高めること ネントに多大な影響を及ぼしたりするおそれがあります。
Analog Dialogue 53-06 3
振動の振幅
Page4
転がり軸受の欠陥の検出/診断方法 転がり軸受の欠陥を診断する場合に検討が必要な
転がり軸受の診断には、数多くの方法が用いられます。転 システムの仕様
がり軸受の物理的な特性に基づき、各軸受の欠陥に対応す 転がり軸受の欠陥を早い段階で検出するには、振動セン
る振動の周波数(以下、欠陥周波数)を、軸受の形状、回 サーのノイズを抑えることと、十分な分解能を確保する
転速度、欠陥の種類から計算することができます。得られ ことが不可欠です。一般に、欠陥が発現し始めたばかり
た欠陥周波数は、不良の診断に利用することが可能です。 の段階では、その兆候を表す振動の信号振幅は大きくあ
転がり軸受の欠陥周波数について、図6にまとめました。 りません。転がり軸受では、設計上の許容誤差に起因し
て固有の機械的スリップが生じます。それにより、転が
一般に、特定の機械/システムから得られた振動のデー り軸受における振動の周波数スペクトルにおいては、複
タを解析する場合には、時間領域の解析手法と周波数領 数のビンにわたって振幅の情報が分散されます。その結
域の解析手法を組み合わせます。時間領域の解析は、シ 果、振動の振幅は更に小さくなります。したがって、振
ステムの振動レベルが全体的に増加しているという傾向 動の信号を早期に発見するには、ノイズを低く抑えるこ
を検出したい場合に有用です。とはいえ、診断に役立つ とが極めて重要です 2。
情報はほとんど得られません。一方、周波数領域の解析
を使えば、診断に関する深い洞察が得られます。但し、 転がり軸受の欠陥を早期に検出するためには、広い帯域幅
システムにおける他の振動の影響により、欠陥周波数の を備える振動センサーが不可欠です。欠陥のある転がり軸
特定方法が複雑になる可能性があります。 受の場合、回転時に欠陥の存在する個所を通過する度に、
高周波成分を含むインパルスが生成されます(図7)。初
転がり軸受の早期診断に向けては、欠陥周波数の高調波 期段階の欠陥については、転がり軸受の(回転速度ではな
成分を利用して初期段階の不具合を検出する方法が有効 く)欠陥周波数の高調波成分を監視します。欠陥周波数と
です。それにより、壊滅的な故障に至らないよう不具合 回転速度の関係から、初期の兆候は数kHzまでの範囲に発
を監視/管理することができます。転がり軸受の欠陥を表 現することが多いのですが、10kHz~20kHzの範囲にま
すシステムの兆候を検出/診断/理解するには、図7に示 で及ぶ可能性もあります 2。回転速度が低い機械の場合で
す包絡線検出などの手法を利用するとよいでしょう。そう も、固有の性質を備える転がり軸受の欠陥を早期に検出
した手法を周波数領域におけるスペクトル解析と組み合わ するには、システムの共振とノイズが低い周波数帯に及
せれば、より洞察に富んだ情報が得られます。 ぼす影響を防ぐために、広い帯域幅が必要になります 3。
転がり軸受の基本的な欠陥周波数
回転要素
FTF
(保持器周波数) ケージの周波数 FTF =
F
2
× 1 –
B
P
× cosΘ
ボール ローラー テーパー
・ローラー
BSF(ボール・ 各回転要素がスピンする際 2
スピン周波数) の角周波数 BSF =
P
2B
×F× [1 – BP × cosΘ [
(ボール外輪 回転要素が外輪の欠陥の上BPFO
通過周波数) を通過する際に生成される BPFO =
N
×F× 1 –
B
× cosΘ ケージ 回転要素
振動の周波数 2 P 外輪 内輪
(ボール内輪 回転要素が内輪の欠陥の上BPFI + Pd +
通過周波数) を通過する際に生成される BPFI =
N
2
×F× 1 +
B
P
× cosΘ
振動の周波数
図 6 . 転がり軸受の欠陥周波数。軸受の種類、形状、回転速度に依存して
周波数の異なる振動が発生します。
周波数の高い信号 周波数の高い信号 周波数の高い信号
1 1
1 BPFI BSF
BPFO 1 1
finner FTF
包絡線信号 包絡線信号 包絡線信号
BPFO BPFI BSF
FTF
図 7 . 包絡線検出手法による欠陥の検出。同手法を用いることにより、
広い帯域幅の振動データから転がり軸受の欠陥の兆候を抽出することができます。
4 Analog Dialogue 53-06
Page5
転がり軸受の欠陥を監視する上では、振動センサーのダ 0.12
イナミック・レンジも重要になります。システムの負荷
と欠陥は、システムの振動に影響を及ぼす可能性があり 0.10
ます。負荷が大きくなると、転がり軸受とその欠陥部分
2xfs
に加わる力も大きくなります。転がり軸受の欠陥によっ
0.08
てインパルスが生成され、それが構造的な共振を励起し
て、システムとセンサーの振動が増幅されます 2。機械の
0.06
起動/停止時や通常運転の最中に機械が加速または減速
すると、その速度の変化によってシステムの共振が励起 3xfs 4xfs GMF
0.04
され、振動の振幅が大きくなる可能性があります 4。セン fs
サーが飽和すると、情報の欠損や誤診断が発生するかも
0.02
しれません。また、利用している技術によっては、セン
サー素子の破損につながる恐れがあります。
0.00
0 20 40 60 80 100 120 140 160 180 200
ギアの不良 周波数〔Hz〕
ギアの不良はなぜ生じるのか?
図 8 . 正常なギアに現れる振動の周波数スペクトル。
ギアの不良は、一般にギアのメカニズムを構成する歯の クランク軸の速度が約 1 0 0 0 r p m、ギアの速度が
疲労、剥離、くぼみといった形で生じます。歯元に亀裂 約 2 9 0 r p m、ギアの歯数が 2 4の場合の結果です。
が入ったり、歯面から金属が剥離したりするということ
です。摩耗、過剰な負荷、潤滑不足、緩みのほか、取り
付け時の不具合や製造時の欠陥が原因で発生する場合も 上記のような特殊な性質を持つことから、周波数領域の
あります 5。 標準的な解析手法だけでは、ギアの不良を正確に特定す
ることはできません。例えば、周波数解析では、初期段
ギアの不良によって何が起きるのか? 階のギアの不良を検出できない可能性があります。衝撃
のエネルギーは、上述した側帯波に含まれていますが、
ギアは、多くの産業用アプリケーションで動力伝達装置
側帯波には、他のギアや機械部品からのエネルギーも含
の主要な要素として利用されています。そうしたアプリ
まれているからです。一般的には、時間同期平均などの
ケーションでは、ギアはかなりの応力と負荷にさらされ
時間領域の手法や、ウェーブレット解析、包絡線復調と
ることになります。ギアの健全性は、機械システム全体
いった混合的な手法の方が有効です 9。
が正しく稼働する上で不可欠です。ギアの不良について
は、再生可能エネルギーの分野でよく知られている例が
ギアの不良の診断を行う場合に検討が必要な
あります。風力タービンの稼働停止(それに伴って収益
が減少します)につながる最大の要因は、主力パワート システムの仕様
レインのマルチステージ・ギアボックスに故障が発生す 一般に、ギアの不良の検出には、広い帯域幅を備える振
ることです 5。それ以外の産業用アプリケーションにお 動センサーが不可欠です。周波数領域において、ギアの
いても、類似の問題について検討する必要があります。 歯数が乗数として作用するからです。比較的低速なシス
テムであっても、検出に必要な周波数範囲は、優に数kHz
ギアの不良の検出/診断方法 に達します。また、局所的な欠陥が生じる場合には更に広
ギアの不良を検出するのは、容易ではありません。不良 い帯域幅が必要になります。
個所の近くに振動センサーを取り付けるのが難しい上に、
複数の理由から、振動センサーとしては、高い分解能を
システム内で起きる複数の機械的励起によって、かなり
備え、ノイズ性能に優れるものが必要不可欠となりま
のバックグラウンド・ノイズが発生するからです。複数
す。振動センサーを特定の不良個所の近くに取り付ける
の回転周波数、ギア比、メッシュ周波数(噛み合い周波
のが難しいことから、振動の信号は、機械的システムの
数)が存在する複雑なギアボックス・システムでは、特
6 影響によって、大きく減衰する可能性があります。そのにその傾向が顕著です 。そのため、ギアの不良の検出で
ため、エネルギーの小さい信号を検出できるようにする
は、アコースティック・エミッション解析、電流シグネ
ことが必須です。また、定常的な周期信号が発生するわ
チャ解析、油中摩耗粉解析など、複数の相補的な手法を
けではないので、標準的なFFT手法によって、高いノイ
活用することになります。
ズ・フロアの中から小振幅の信号を必ず抽出できるとは
一般に、振動の解析を行う場合には、支配的な振動モー 限りません。したがって、振動センサーそのもののノイ
ドが軸方向になるような形で、ギアボックスのケースに ズ・フロアが低くなければなりません。このことは、ギ
振動センサーを取り付けます 7。正常なギアの場合、メッ アボックスの様々な要素から生じる複数の振動が混合す
シュ周波数として知られる周波数に振動の信号が現れま る環境では、特に重要になります。また、機械の保護の
す。メッシュ周波数は、軸の回転周波数とギアの歯数の 面からだけでなく、シグナル・コンディショニングの面
積で決まります。通常は、製造/組み立ての許容誤差に起 からも、不良はなるべく早期に検出するべきです。実は、
因する変調によって、側帯波も発生します。図8に示した 複数の歯が破損する場合よりも、1つの歯が破損する場合
のは、正常なギアに生じる振動の周波数スペクトルです。 の方が、振動は激しくなる可能性が高くなります。その
歯の亀裂をはじめとする局所的な欠陥が生じると、各回転 ため、早い段階であるほど不良を容易に検出できる可能
に伴う振動の信号には、別の信号成分が加わります。別 性があるということです。
の信号成分とは、比較的エネルギー・レベルが低く、短
時間だけ持続する衝撃を受けた場合のシステムの機械的
な応答のことです。結果として、通常は非周期的で非定
常的な小振幅の広帯域信号が現れることになります 7、8。
Analog Dialogue 53-06 5
加速度〔g〕
Page6
まとめ 参考資料
本稿では、機械で発生する一般的な不具合の例として、 1 Jason Mais「Spect rum Analys is : The Key Fea tures of
不均衡、位置ずれ、転がり軸受の欠陥、ギアの不良を取 Analyz ing Spec t ra(スペクトル解析:スペクトル解析に
り上げました。ただ、これらは高性能の振動センサーに 必要な主要機能)」SKF USA, Inc .、2002年
よって検出/診断できる不具合のうち、ほんの一部にす
ぎません。性能の高い振動センサーを採用した上で、シ
2 R o b e r t B o n d R a n d a l l「 Vi b r a t i o n - b a s e d C o n d i t i o n
ステム・レベルの適切な考察結果を適用すれば、状態基 M o n i t o r i n g : I n d u s t r i a l , A e r o s p a c e , a n d A u t o m o t i v e
準保全に向けた次世代のソリューションを実現可能です。 Applicat ions(振動に基づく状態監視:産業/航空宇宙/
そうしたソリューションを活用すれば、広範な種類の産 自動車分野のアプリケーション)」John Wiley & Sons ,
業用機械や産業用アプリケーションに関する深い洞察を Ltd .、2010年12月
得ることができます。状態基準保全向けの新たなソリュ
3
ーションは、機械の運用方法と保守の実施方法に変革を Scot t Morris「SKF Pulp and Paper Pract ices(SKF Pulp
もたらします。次世代の機械に対して新たな機能が適用 & Paperのプラクティス)」SKF Globa l Pu lp & Paper
されることで、ダウンタイムを短縮して効率を高めるこ Segment、No. 19、2016年
とが可能になります。 4 Chr i s D. Powel l、Erik Swanson、Sor in Weissman「A
Prac t ica l Review of Rota t ing Machinery Cr i t ica l Speeds
表1. 不具合の種類とセンサーに求められる性能の関係 and Modes(回転機械における重要な速度とモードに関す
る実用的検討)」Sound and Vibra t ion、2005年5月
不具合の ダイナミッ
帯域幅 ノイズ密度 分解能 5 S h a h i n H e d a y a t i K i a、 H u m b e r t o H e n a o、 G e r a r d -
種類 ク・レンジ
Andre Capol ino「Trends in Gear Faul t Detec t ion Using
Electr ical Signature Analysis in Induction Machine-Based
不均衡 低 中 高 中
S y s t e ms(電気的兆候解析を用いたギアの不良検出、誘
導機に基づくシステムにおけるトレンドを探る)」2015
IEEE Workshop on Elec t r ica l Machines Des ign , Cont ro l
位置ずれ 中 低/中 高 中 and Diagnosis (WEMDCD)、Torino、pp. 297-303、2015
年
転がり軸受 高/非常に 6
低 中 高 Alexander Bl iznyuk、Ido Dadon、Renata Klein、Jacob の欠陥 高い Bortman「Gear Diagnost ics-Fault Type Character is t ics(
ギアの診断:故障の種類の特性)」2014年
ギアの不良 非常に高い 低 低 高
7 G i o r g i o D a l p i a z、 A l e s s a n d r o R i v o l a、 R i c c a r d o
R u b i n i「 E f f e c t i v e n e s s a n d S e n s i t i v i t y o f Vi b r a t i o n
P r o c e s s i n g Te c h n i q u e s f o r L o c a l F a u l t D e t e c t i o n i n
表 1において、帯域幅が「低」というのは 1 k H z以下と G e a r s(ギアの局所的な故障検出に使用可能な振動処理
いう意味です。「中」は 1 k H z~ 5 k H z、「高」は 5 k H z
手法の効果と感度)」Mechan ica l Sys t ems and S igna l
以上が必要という意味になります。同様に、ノイズ Process ing、Volume 14、 I ssue 3、2000年
密度については、「低」は 1 m g / √ H z以上、「中」は
100μg/√Hz~1mg/√Hz、「高」は100μg/√Hz以下という 8 Wenyi Wang「Ear ly Detec t ion of Gear Tooth Cracking
意味です。ダイナミック・レンジについては、「低」は U s i n g t h e R e s o n a n c e D e m o d u l a t i o n Te c h n i q u e(共鳴
5g以下、「中」は5g~20g、「高」は20g以上です。 復調法を用いてギアの歯の亀裂を早期に検出する)」
Mechanica l Sys tems and Signal Process ing、Volume 15
、 I ssue 5、2001年
9 Kiran Vernekar、Hemantha Kumar、K. V. Gangadharan「
G e a r F a u l t D e t e c t i o n U s i n g Vi b r a t i o n A n a l y s i s a n d
Continuous Wavelet Transform(振動解析と連続ウェーブ
レット変換によるギアの故障検出)」Procedia Mater ia ls
Sc ience、Volume 5、2014年
6 Analog Dialogue 53-06
Page7
Pete Sopcik
著者:
Pete Sopcik(pete.sopcik@analog.com)は、アナログ・デバイセズで状態
基準保全を担当するマーケティング・マネージャです。産業用アプリケー
ションにおいて状態監視を実現するために必要なセンサー、シグナル・チ
ェーン、ソリューションに関する戦略の策定に取り組んでいます。現職に
就く前は、アナログ・デバイセズで11年にわたって集積度の高い高速コン
バータやセンサー・モジュールの設計/開発から、MEMSベースの慣性計
測ユニットを含むシステム・レベルのソリューションのプロジェクト管理
に至るまで、様々な業務に従事してきました。フロリダ大学で電気工学の
学士号、ウェイク・フォレスト大学で経営学の修士号を取得しています。
Dara O’Sullivan
Dara O'Sul l ivan(dara .osul l ivan@analog.com)は、アナログ・デバイセ
ズのシステム・アプリケーション・マネージャです。オートメーション/
エネルギー事業部門のコネクテッド・モーション/ロボティクス・チーム
に所属しています。専門は、産業用モーション・コントロール分野にお
ける電力変換/制御/監視技術です。アイルランドのユニバーシティ・
カレッジ・コークで工学分野の学士号、修士号、博士号を取得していま
す。2001年から、産業分野や再生可能エネルギーの分野で研究、コンサ
ルティングなどの業務に従事しています。
Analog Dialogue 53-06 7