


ポジショニングテーブルのカタログです。
このカタログについて
| ドキュメント名 | ポジショニングテーブル |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.9Mb |
| 関連製品 | |
| 登録カテゴリ | |
| 取り扱い企業 | 日本ベアリング株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
POSITIONING TABLE
ポジショニングテーブル
構造と特長・ ・・・・・・・・・・・・・・・・・・・・・・・・ H-2
形式・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ H-2
特殊対応・・・・・・・・・・・・・・・・・・・・・・・・・・・ H-3
呼び番号の構成・ ・・・・・・・・・・・・・・・・・・・・ H-4
NBポジショニングテーブルの機能評価方法・・・ H-5
精度・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ H-8
機能評価システム・・・・・・・・・・・・・・・・・・・・ H-10
精度測定データ・・・・・・・・・・・・・・・・・・・・・・ H-11
寸法表・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ H-12〜
技術資料・・・・・・・・・・・・・・・・・・・・・・・・・・・ H-32
NBポジショニングテーブル制御システム・ ・・ H-36
ポジショニングテーブルNWT形 ポ
構造と特長・ ・・・・・・・・・・・・・・・・・・・・・・・・ H-41 ジ
精度 シ
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ H-41 ョ
位置決め精度・ ・・・・・・・・・・・・・・・・・・・・・・ H-41 ニ
ン
運動・姿勢精度・ ・・・・・・・・・・・・・・・・・・・・・ H-41 グ
寸法表 テ
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ H-42 ー
ACサーボモータ・ドライバ仕様・ ・・・・・・・・ H-43 ブ
ル
アライメントステージNTX形
構造と特長・ ・・・・・・・・・・・・・・・・・・・・・・・・ H-44
呼び番号の構成・ ・・・・・・・・・・・・・・・・・・・・ H-45
寸法表・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ H-45
NTX・ACサーボモータ・ドライバ仕様・・・・ H-46
H-1
Page2
POSITIONING TABLE
ポジショニングテーブル
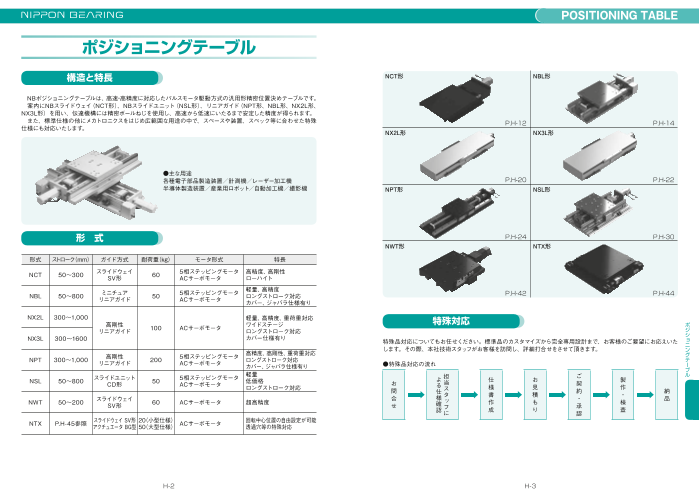
構造と特長 NCT形 NBL形
NBポジショニングテーブルは、高速・高精度に対応したパルスモータ駆動方式の汎用形精密位置決めテーブルです。
案内にNBスライドウェイ(NCT形)、NBスライドユニット(NSL形)、リニアガイド(NPT形、NBL形、NX2L形、
NX3L形)を用い、伝達機構には精密ボールねじを使用し、高速から低速にいたるまで安定した精度が得られます。
また、標準仕様の他にメカトロニクスをはじめ広範囲な用途の中で、スペースや装置、スペック等に合わせた特殊 P.H-12 P.H-14
仕様にも対応いたします。
NX2L形 NX3L形
●主な用途
各種電子部品製造装置/計測機/レーザー加工機 P.H-20 P.H-22
半導体製造装置/産業用ロボット/自動加工機/撮影機 NPT形 NSL形
形 式 P.H-24 P.H-30
NWT形 NTX形
形式 ストローク(mm) ガイド方式 耐荷重(kg) モータ形式 特長
NCT 50〜300 スライドウェイ 5相ステッピングモータ 、高剛性
SV形 60 高精度
ACサーボモータ ローハイト
NBL 50〜800 ミニチュア 5相ステッピングモータ 軽量、高精度 P.H-42 P.H-44
リニアガイド 50 ACサーボモータ ロングストローク対応
カバー、ジャバラ仕様有り
NX2L 300〜1,000 軽量、高精度、重荷重対応
高剛性 特殊対応
ACサーボモータ ワイドステージ ポ
リニアガイド 100 ロングストローク対応 ジ
シ
NX3L 300〜1600 カバー仕様有り 特殊品対応についてもお任せください。標準品のカスタマイズから完全専用設計まで、お客様のご要望にお応えいた ョ
ニ
します。その際、本社技術スタッフがお客様を訪問し、詳細打合せをさせて頂きます。 ン
グ
NPT 300〜1,000 高剛性 5相ステッピングモータ 高精度、高剛性、重荷重対応
リニアガイド 200 ACサーボモータ ロングストローク対応 テ
カバー、ジャバラ仕様有り ●特殊品対応の流れ ー
ブ
ル
NSL 50〜800 スライドユニット 5相ステッピングモータ 軽量
よ担
CD形 50 ACサーボモータ 低価格 お 仕 お ご 製
ロングストローク対応 る当
問 ス 様 見 契 作
仕
NWT 50〜200 スライドウェイ 合 様タ 書 積 約 ・ 納
SV形 60 ACサーボモータ 超高精度 せ 確ッ 作 も ・ 検 品
認フ 成 り 承
に 認 査
NTX P.H-45参照 スライドウェイ SV形 20(小型仕様)
アクチュエータ BG型 大型仕様) ACサーボモータ 回転中心位置の自由設定が可能
50( 透過穴等の特殊対応
H-2 H-3
Page3
POSITIONING TABLE
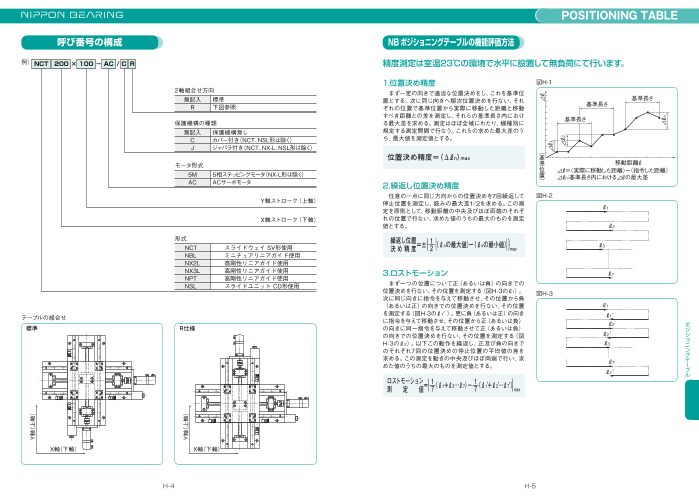
呼び番号の構成 NB ポジショニングテーブルの機能評価方法
例) NCT 200 × 100 − AC / C R 精度測定は室温23℃の環境で水平に設置して無負荷にて行います。
1.位置決め精度 図H-1
2軸組合せ方向 まず一定の向きで適当な位置決めをし、これを基準位
無記入 標準 置とする。次に同じ向きへ順次位置決めを行ない、それ 基準長さ
R 下図参照 基準長さ
ぞれの位置で基準位置から実際に移動した距離と移動
すべき距離との差を測定し、それらの基準長さ内におけ
保護機構の種類 基準長さ
る最大差を求める。測定はほぼ全域にわたり、機種別に
無記入 保護機構無し 規定する測定間隔で行なう。これらの求めた最大差のう
C カバー付き(NCT、NSL形は除く) ち、最大値を測定値とする。
J ジャバラ付き(NCT、NX-L、NSL形は除く)
(
位置決め精度=(Δℓn)max 基
モータ形式 準 移動距離ℓ
位 ⊿ℓ=(実際に移動した距離)ー(指令した距離)5M 5相ステッピングモータ(NX-L形は除く) 置
) ⊿ℓ:n 基準長さ内における⊿ℓの最大差
AC ACサーボモータ 2.繰返し位置決め精度
任意の一点に同じ方向からの位置決めを7回繰返して 図H-2
Y軸ストローク(上軸) 停止位置を測定し、読みの最大差1/2を求める。この測
定を原則として、移動距離の中央及びほぼ両端のそれぞ ℓ1
X軸ストローク(下軸) れの位置で行ない、求めた値のうちの最大のものを測定
値とする。 ℓ2
形式 繰返し位置 1
NCT スライドウェイ SV形使用 決 め 精 度=±⎧⎧ ⎫
⎩2⎨(ℓnの最大値)−(ℓnの最小値⎬) ℓ3
⎩ ⎭max
NBL ミニチュアリニアガイド使用
NX2L 高剛性リニアガイド使用
NX3L 高剛性リニアガイド使用 3.ロストモーション ℓ7
NPT 高剛性リニアガイド使用
NSL スライドユニット CD形使用 まず一つの位置について正(あるいは負)の向きでの
位置決めを行ない、その位置を測定する(図H-3のℓ1)。 図H-3
次に同じ向きに指令を与えて移動させ、その位置から負
(あるいは正)の向きでの位置決めを行ない、その位置 ℓ1
を測定する(図H-3のℓ1′)。更に負(あるいは正)の向き
テーブルの組合せ ℓ1'
に指令を与えて移動させ、その位置から正(あるいは負) ℓ2
標準 R仕様 の向きに同一指令を与えて移動させて正(あるいは負) ポ
ジ
の向きでの位置決めを行ない、その位置を測定する(図 ℓ2' シ
H-3のℓ2)。以下この動作を繰返し、正及び負の向きで ℓ ョ
3 ニ
のそれぞれ7回の位置決めの停止位置の平均値の差を ン
求める。この測定を動きの中央及びほぼ両端で行い、求 グ
ℓ7 テ
めた値のうちの最大のものを測定値とする。 ー
ℓ7' ブ
ル
ロストモーション= 1 1
測 定 値 7(ℓ1+ℓ2…ℓ7)− 7(ℓ1'+ℓ2'…ℓ7' )
max
X軸(下軸) X軸(下軸)
H-4 H-5
Y軸(上軸)
Y軸(上軸)
⊿ℓ
⊿ℓ1
⊿ℓ2
⊿ℓn
Page4
POSITIONING TABLE
4.バックラッシュ 図H-4 8.真直度 図H-7
テーブルに送りをかけて、わずかに動かしたときのテス ⊿ℓ 直線でなければならないテーブル運動の幾何学的直
トインジケータの読みを基準とし、更にその状態から送 線からの狂いの大きさとする。 真直度もどり
り装置によらずにテーブルを同方向に微動させたときの 水平真直度:テーブルの移動軸の左右(水平)方向の動き
テストインジケータの読みの差を求める。この測定を移 垂直真直度:テーブルの移動軸の上下(垂直)方向の動き
送りねじ送り 荷重変位
動距離の中央及びほぼ両端の位置で行ない、求めた値 レーザー真直度測定システムで測定し、測定した値に
のうちの最大差を測定値とする。 平行な二つの直線で、その間隔が最小になるように狭ん
だときの2直線の間隔で表わす。
バックラッシュ=(Δℓ)max
図H-5 9.ピッチング、ヨーイング 図H-8
5.平行度A ピッチング:テーブル移動軸における上下方向の角度変化
テーブルを取付けた定盤上にテストインジケータを固 平行度A ヨーイング:テーブル移動軸における左右方向の角度変化
垂直真直度 テーブル移動軸
定し、ほぼテーブル上面の中央にテストインジケータを位 レーザー角度測定システムで測定し、読みの最大差で
置させ、テーブルを移動距離のほぼ全域にわたって動か 表わす。 ヨーイング
したときのテストインジケータの読みの最大差を測定値 水平真直度
とする。
ピッチング
6.平行度B 平行度B
テーブル中央にテストインジケータを固定し、テーブル
を取り付けた定盤上にテストインジケータを当て、テーブ
ルを移動距離のほぼ全域にわたって動かしたときのテス
トインジケータの読みの最大差を測定値とする。※注
NCT形、NWT形適用
7.XY運動の直角度 図H-6
テーブル上面に、XあるいはY軸の移動を基準に直角
定規を据付け、基準軸と直角方向のほぼ移動距離全域
にわたって動かしたときのテストインジケータの読みの
最大差を測定値とする。 ポ
ジ
シ
ョ
ニ
ン
グ
テ
X ー
軸 ブ
ル
Y軸
H-6 H-7
Page5
POSITIONING TABLE
精 度
NCT形 単位:μm NPT形 単位:μm
1軸テーブル 位置決め 繰返し位置 バック 2軸テーブル 1軸テーブル 2軸テーブル
呼び番号 平行度 平行度A び番号 平行度 位置決め 繰返し位置 バック
A B 精度 決め精度 ラッシュ 直角度 X方向 Y方向 呼び番号 呼 A 精度 決め精度 ラッシュ 直角度 平行度A
X方向 Y方向 呼び番号
NCT 50-5M,-AC 3 NCT 50× 50-5M,-AC NPT 300-5M,-AC 15 20 15 20 15 NPT300×300-5M,-AC
NCT100-5M,-AC 5 10 6 5 10 5 NCT100×100-5M,-AC NPT 400-5M,-AC NPT400×400-5M,-AC
NCT150-5M,-AC 6 12 9 6 12 6 0×150-5M,-AC NPT 500-5M,-AC 20 30 20 25 20 NPT500×500-5M,-AC
NCT200-5M,-AC 7 12 ±1 1以下 NCT15
7 13 7 NCT200×200-5M,-AC NPT 600-5M,-AC
NCT250-5M,-AC 8 15 8 15 8 NCT250×250-5M,-AC NPT 700-5M,-AC 40 ±2 2以下
NCT300-5M,-AC 10 20 15 10 18 10 NCT300×300-5M,-AC NPT 800-5M,-AC
NBL形 単位:μm NPT 900-5M,-AC 30 50
NPT1000-5M,-AC
1軸テーブル 位置決め 繰返し位置 ーブル 標準品のY軸(上軸)のストロークは500mmが最大となります。500mmを超えるストロークをご希望の場合はNBまでお問い合わせくだ
呼び番号 平行度 バック 2軸テ
さい。
A 精度 決め精度 ラッシュ 直角度 平行度A
X方向 Y方向 呼び番号
NBL 50-5M,-AC NBL 50× 50-5M,-AC
NBL100-5M,-AC 10 30 20 10 NBL100×100-5M,-AC NSL形(コマーシャルタイプ) 単位:mm
NBL150-5M,-AC 10 NBL150×150-5M,-AC 1軸テーブル 2軸テーブル
NBL200-5M,-AC NBL200×200-5M,-AC 繰返し位置 バック
平行度 平行度A
NBL250-5M,-AC 15 25 15 NBL250×250-5M,-AC 呼び番号 決め精度 ラッシュ 直角度 呼び番号
A X方向 Y方向
NBL300-5M,-AC NBL300×300-5M,-AC NSL 50-5M,-AC NSL 50× 50-5M,-AC
NBL350-5M,-AC 20 35 ±1 1以下 15 30 20 NBL350×350-5M,-AC
NBL400-5M,-AC NBL400×400-5M,-AC NSL100-5M,-AC NSL100×100-5M,-AC
NBL450-5M,-AC 20 35 25 NBL450×450-5M,-AC NSL150-5M,-AC 0.06 0.06 NSL150×150-5M,-AC
NBL500-5M,-AC 25 40 NSL200-5M,-AC 0.05 0.1 NSL200×200-5M,-AC
NBL600-5M,-AC NSL250-5M,-AC NSL250×250-5M,-AC
NBL700-5M,-AC 50
NSL300-5M,-AC NSL300×300-5M,-AC
NBL800-5M,-AC 35 55 0.07
NSL350-5M,-AC ±0.05 0.1以下 NSL350×350-5M,-AC
標準品のY軸(上軸)のストロークは450mmが最大となります。450mmを超えるストロークをご希望の場合はNBまでお問い合わせください。 0.07
NSL400-5M,-AC
NX2L形 単位:μm NSL450-5M,-AC
1軸テーブル
度 位置決め 繰返し位置 バック 2軸テーブル NSL500-5M,-AC
呼び番号 平行 NSL600-5M,-AC
A 精度 決め精度 ラッシュ 直角度 平行度A
X方向 Y方向 呼び番号 0.08
NX2L 300-AC 20 NSL700-5M,-AC
00-AC 35 15 30 20 NX2L 300×300-AC
NX2L 4 L 400×400-AC NSL800-5M,-AC
NX2L 500-AC 25 40 20 35 25 NX2
NX2L 500×500-AC 標準品のY軸(上軸)のストロークは350mmが最大となります。350mmを超えるストロークをご希望の場合はNBまでお問い合わせください。
NX2L 600-AC ポ
NX2L 700-AC 50 ±2 2
ジ
NX2L 800-AC ●ストロークの相異なるテーブルを組合わせた2軸テーブ 図H-9 シ
NX2L 900-AC 35 55 ル精度については、次の様になります。 ョ
ニ
NX2L 1000-AC ①平行度AのX方向 ン
標準品のY軸(上軸)のストロークは500mmが最大となります。500mmを超えるストロークをご希望の場合はNBまでお問い合わせください。 X軸ストロークと同一ストロークをもつ2軸基本テーブ グ
テ
ルの平行度AのX方向
NX3L形 単位:μm ー
②平行度AのY方向 ブ
1軸テーブル ル
位置決め 繰返し位置 バック 2軸テーブル Y軸ストロークと同一ストロークをもつ1軸テーブル精
呼び番号 平行度 度の平行度A
A 精度 決め精度 ラッシュ 直角度 平行度A
X方向 Y方向 呼び番号
③直角度
NX3L 300-AC 20 X-Yのどちらか長いストロークと同じストロークをもつ
-AC 35 15 30 20 NX3L 300×300-AC
NX3L 400 400×400-AC
NX3L 500-AC 25 40 20 35 25 NX3L
NX3L 500×500-AC 2軸基本テーブルの直角度 Y
軸
NX3L 600-AC ※位置決め精度、繰返し位置決め精度、バックラッシュ
-AC 50 25 40 30 NX3L 600×600-AC
NX3L 700 については1軸テーブル精度と同等になります。
NX3L 800-AC ±2 2 例 NCT 200×100-5Mの精度
NX3L 900-AC 35 55 ⎧平行度A:X方向 13μm、Y方向 5μm
NX3L 1000-AC 軸
⎨ X
NX3L 1200-AC ⎩直角度:7μm
NX3L 1400-AC 45 65 NBL 300×50-5Mの精度
NX3L 1600-AC ⎧
⎨平行度A:X方向 30μm、Y方向 10μm
標準品のY軸(上軸)のストロークは600mmが最大となります。600mmを超えるストロークをご希望の場合はNBまでお問い合わせください。 ⎩直角度:15μm
H-8 H-9
Page6
POSITIONING TABLE
機能評価システム 精度測定データ
NBポジショニングテーブルは超精密レーザー測定シ ●テーブル呼び番号 NCT50-AC
ステムを使用して、さまざまな機能を評価し最適な特性 ●ドライバ呼び番号 MSD011A1XX
を保証します。
なお測定は、室温23℃の環境下にて行います。 位置決め精度
真直度(水平)
カラーレーザープリンター コントローラ
ドライバ ポ
ジ
シ
ョ
ニ
超精密レーザー測定装置 真直度(垂直) ン
グ
テ
ー
ブ
ル
NBポジショニングテーブル
H-10 H-11
Page7
POSITIONING TABLE
NCT形 NCT300
6-M6深さ13
A ※モーターコネクタ
B C M 75
E 180 E 25 12
NCT50
A
B C M 60 センサーコネクタ
E 150 E O.T.2センサ
6 23 10
4-M6深さ11 ※モーターコネクタ 85 85 85 85 D ORGセンサ
PORG2センサ D 30.5
N-取付穴 O.T.1センサ
1/2S 1/2S
※部モーターコネクタはステッピング
モータータイプに適用します。
O.T.2センサ
PORG2センサ センサーコネクタ
D 120 D ORGセンサ 29
N-取付穴 O.T.1センサ 有効 最高 加減速 水平 主要寸法 ボール イナーシャ センサ 質量
1/2S 1/2S ストローク 速度 時間 可搬 A B C M E D N- ねじ ストロークエンド
呼び番号 質量 取付穴 リード モータ ガイド (O.T.1,O.T.2) 原点
※部モーターコネクタはステッピング Vmax. (0 〜 Vmax.) (径) 原点前 (ORG)
モータータイプに適用します。 mm mm/sec sec kg mm mm mm mm mm mm mm ×10−4kg・m2 (PORG2) kg
NCT 50-5M
-AC 56 100 0.1 268 45 53
250 0.2 310 170
48 92 10 25 4-M6用 0.121 3K-S545
0.129 MSMF012L1A2 SV4160 フォトマイクロ
エンコーダZ相 9
NCT100-5M 4 61 53 S545 フォトマイクロ
-AC 100 100 0.1 32
250 0.2 367 210
65 92 15 20 0.150 3K-
0.158 MSMF012L1A2 SV4200 エンコーダZ相 12
NCT100〜250 NCT150-5M 150 100 0.1 389
-AC 250 0.2 250 86 53 35 40 6-M6用 0.174 3K-S545 フォトマイクロ
5
6-M6深さ11 A
B C M 60 NCT200-5M 100 0.1 60 428 92 0.181 MSMF012L1A2 SV4240 14
E 180 E 6 23 10 -AC 200 494 53 3K-S545 フォトマイクロ エンコーダZ相
フォトマイクロ
250 0.2 533 330 111 92 75 80 (φ15)0.215
0.223 MSMF012L1A2 SV4320 エンコーダZ相 18
※モーターコネクタ NCT250-5M 250 100 0.1 599 3K-S545 フォトマイクロ
-AC 250 0.2 638 410 136 53
92 115 35 0.257
ポ
10-M6用 0.265 MSMF012L1A2 SV4400 エンコーダZ相 22
ジ
NCT300-5M 300 100 0.1 560.5 2 48.5 4K-M564 フォトマイクロ シ
-AC 250 0.2 607 450 6
65 92 135 55 0.286
0.294 MSMF012L1A2 SV4440 エンコーダZ相 29 ョ
ニ
イナーシャはボールねじ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。 ン
水平可搬質量は加減速時間により変化します。 グ
ACサーボモータの電源はAC100V仕様も選択できます。 テ
ー
ブ
ル
最小送り量
O.T.2センサ センサーコネクタ 分解能 pluse/rev 1,000* 2,500 5,000 10,000
PORG2センサ 最小送り量 mm 0.005 0.002 0.001 0.0005
D O.T.1センサ ORGセンサ
D 85 85 29
N-取付穴 * 出荷時の設定
1/2S 1/2S 表記以外の設定も可能です。NBまでお問い合わせください。
※部モーターコネクタはステッピング
モータータイプに適用します。
H-12 H-13
(170)
85 120
170
200
150 130
150
170
160
180
200
(170)
85
200
150
160
180
200
Page8
POSITIONING TABLE
NBL形
−標準形−
4-M6深さ16 有効 最高 加減速 水平 主要寸法 ボール イナーシャ センサ 質量
A
B 10 M 72 ストローク 速度 時間 可搬 A B M D N- ねじ ストロークエンド
N-取付穴 D 150 150 150 D 36.5 呼び番号 質量 取付穴 リード モータ ガイド (O.T.1,O.T.2) 原点
130 16 16 Vmax. (0 〜 Vmax.) (径) 原点前 (ORG)
mm mm/sec sec kg mm mm mm mm mm ×10−4kg・m2 (PORG1) kg
NBL 50-5M 50 200 0.2 328.5 4K-M564 フォトマイクロ
-AC 500 0.4 336.2 270 48.5
56.2 60 4-M6用 0.172
0.168 MQMF012L1A2 エンコーダZ相 7.5
NBL100-5M 100 200 0.2 378.5 4K-M564 フォトマイクロ 8.0
-AC 500 0.4 386.2 320 48.5
56.2 10 0.191
0.187 MQMF012L1A2 エンコーダZ相 8 .5
NBL150-5M 150 200 0.2 428.5 4K-M564 フォトマイクロ
-AC 500 0.4 436.2 370 48.5
56.2 35 6-M6用 0.210
0.207 MQMF012L1A2 エンコーダZ相 9.0
NBL200-5M 200 200 0.2 478.5 4K-M564 フォトマイクロ 9.5
O.T.2センサ 50 -AC 500 0.4 486.2 420 48.5
56.2 60 0.230
0.226 MQMF012L1A2 エンコーダZ相 10 .0
ORGセンサ
PORG1センサ NBL250-5M 250 200 0.2 528.5 4K-M564 フォトマイクロ
O.T.1センサ
-AC 500 0.4 536.2 470 48.5
56.2 10 0.249
0.246 MQMF012L1A2 エンコーダZ相 10.5
NBL300-5M 300 200 0.2 578.5 4K-M564 フォトマイクロ 11.0
-AC 500 0.4 586.2 520 48.5
56.2 35 8-M6用 0.269
0.265 MQMF012L1A2 ミニ エンコーダZ相 11 .5
20 1/2S 180 1/2S 20 ※モ-タ-コネクタ NBL350-5M 350 200 0.2 4K-M564 チュア
-AC 500 50 628.5 10
0.4 636.2 570 48.5
56.2 60 0.288
(φ15) 0.284 MQMF012L1A2 リニア フォトマイクロ フォトマイクロ
ガイド エンコーダZ相 12.0
NBL400-5M 400 200 0.2 678.5 4K-M564 呼び15 フォトマイクロ 12.5
-AC 500 0.4 686.2 620 48.5
56.2 10 0.307
0.304 MQMF012L1A2 エンコーダZ相 13 .0
NBL450-5M 450 200 0.2 728.5 4K-M564 フォトマイクロ
※部モ-タ-コネクタはステッピングモ-タ-タイプに適用します センサ-コネクタ -AC 500 0.4 736.2 670 48.5
56.2 35 10-M6用 0.327
0.323 MQMF012L1A2 エンコーダZ相 13.5
NBL500-5M 500 200 0.2 778.5 4K-M564 フォトマイクロ 14.0
-AC 500 0.4 786.2 720 48.5
56.2 60 0.346
0.343 MQMF012L1A2 エンコーダZ相 14 .5
NBL600-5M 600 200 0.2 878.5 0.385 4K-M564 フォトマイクロ 15.5
-AC 500 0.4 886.2 820 48.5
56.2 35 12-M6用 0.381 MQMF012L1A2 エンコーダZ相 16 .0
NBL700-5M 700 200 0.2 978.5 0.429 4K-M564 フォトマイクロ ポ
-AC 500 0.4 986.2 920 48.5
56.2 10
14-M6用 0.425 MQMF012L1A2 エンコーダZ相 17.5
ジ
NBL800-5M 800 200 0.2 1,078.5 0.468 4K-M564 フォトマイクロ シ
ョ
-AC 500 0.4 1,086.2 1,020 48.5
56.2 60 0.464 MQMF012L1A2 エンコーダZ相 19.0
ニ
ン
イナーシャはボールネジ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。 グ
水平可搬質量は加減速時間により変化します。 テ
ACサーボモータの電源はAC100V仕様も選択できます。 ー
ブ
ル
最小送り量
分解能 pluse/rev 1,000* 2,000 5,000 10,000
最小送り量 mm 0.01 0.005 0.002 0.001
* 出荷時の設定
表記以外の設定も可能です。NBまでお問い合わせください。
H-14 H-15
130
2 60
40
180
160
180
Page9
POSITIONING TABLE
NBL形
−カバータイプ−
6-M6深さ16 A 有効 最高 加減速 水平 主要寸法 ボール イナーシャ センサ 質量
10 B 10 M 77 ストローク 速度 時間 可搬 A B M D N- ねじ ストロークエンド
N-取付穴 D 150 150 150 D 21 36.5 呼び番号 質量 取付穴 リード モータ ガイド (O.T.1,O.T.2) 原点
80 80 16 Vmax. (0 〜 Vmax.) (径) 原点前 (ORG)
mm mm/sec sec kg mm mm mm mm mm ×10−4kg・m2 (PORG1) kg
NBL 50-5M/C 50 200 0.2 338.5 0.165 4K-M564 フォトマイクロ 8.5
-AC/C 500 0.4 346.2 270 48.5
56.2 60 4-M6用 0.162 MQMF012L1A2 エンコーダZ相 9 .0
NBL100-5M/C 100 200 0.2 388.5 48.5 0.185 4K-M564 フォトマイクロ 9.5
-AC/C 500 0.4 396.2 320 56.2 10 0.181 MQMF012L1A2 エンコーダZ相 10 .0
NBL150-5M/C 150 200 0.2 438.5 48.5 0.204 4K-M564 フォトマイクロ
-AC/C 500 0.4 446.2 370 56.2 35 6-M6用 0.200 MQMF012L1A2 エンコーダZ相 10.5
NBL200-5M/C 200 200 0.2 488.5 0.223 4K-M564 フォトマイクロ
-AC/C 500 0.4 496.2 420 48.5
56.2 60 0.220 MQMF012L1A2 エンコーダZ相 11.5
O.T.2センサ 50
ORGセンサ
PORG1センサ NBL250-5M/C 250 200 0.2 538.5 5 0.243 4K-M564 フォトマイクロ
O.T.1センサ
-AC/C 500 0.4 546.2 470 48.
56.2 10 0.239 MQMF012L1A2 エンコーダZ相 12.5
NBL300-5M/C 300 200 0.2 588.5 0.262 4K-M564 フォトマイクロ
-AC/C 500 0.4 596.2 520 48.5
56.2 35 8-M6用 0.258 MQMF012L1A2 ミニ エンコーダZ相 13.5
20 1/2S 180 1/2S 20
※モ-タ-コネクタ NBL350-5M/C 350 200 0.2 0.281 4K-M564 チュア 14.0
-AC/C 500 0.4 50 638.5 48.5 10
646.2 570 56.2 60
(φ15) 0.278 MQMF012L1A2 リニア フォトマイクロ フォトマイクロ
ガイド エンコーダZ相 14 .5
NBL400-5M/C 400 200 0.2 688.5 5 0.301 4K-M564 呼び15 フォトマイクロ
-AC/C 500 0.4 696.2 620 48.
56.2 10 0.297 MQMF012L1A2 エンコーダZ相 15.0
NBL450-5M/C 450 200 0.2 738.5 0.320 4K-M564 フォトマイクロ
※部モ-タ-コネクタはステッピングモ-タ-タイプに適用します センサ-コネクタ -AC/C 500 0.4 746.2 670 48.5
56.2 35 10-M6用 0.317 MQMF012L1A2 エンコーダZ相 16.0
NBL500-5M/C 500 200 0.2 788.5 0.340 4K-M564 フォトマイクロ
-AC/C 500 0.4 796.2 720 48.5
56.2 60 0.336 MQMF012L1A2 エンコーダZ相 17.0
NBL600-5M/C 600 200 0.2 888.5 8.5 0.378 4K-M564 フォトマイクロ 18
-AC/C 500 0.4 896.2 820 4
56.2 35 12-M6用 0.375 MQMF012L1A2 エンコーダZ相 .519.0
NBL700-5M/C 700 200 0.2 988.5 0.423 4K-M564 フォトマイクロ ポ
-AC/C 500 0.4 996.2 920 48.5
56.2 10 0.419 MQMF012L1A2 エンコーダZ相 21.0
ジ
NBL800-5M/C 200 0.2 4-M6用 0.461 4K-M564 フォトマイクロ シ
800 1,088.5 ョ
-AC/C 500 0.4 1,096.2 1,020 48.5 1
56.2 60 0.458 MQMF012L1A2 エンコーダZ相 23.0
ニ
ン
イナーシャはボールネジ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。 グ
水平可搬質量は加減速時間により変化します。 テ
ACサーボモータの電源はAC100V仕様も選択できます。 ー
ブ
ル
最小送り量
分解能 pluse/rev 1,000* 2,000 5,000 10,000
最小送り量 mm 0.01 0.005 0.002 0.001
* 出荷時の設定
表記以外の設定も可能です。NBまでお問い合わせください。
H-16 H-17
168
2 60
40
180
12 12
160
180
Page10
POSITIONING TABLE
NBL形
−ジャバラタイプ−
N-取付穴 4-M6深さ16 有効 最高 加減速 水平 主要寸法 ボール イナーシャ センサ 質量
A ストローク 速度 時間 可搬 A B M D E N- ねじ ストロークエンド
10 B 10 M 呼び番号 質量 取付穴 リード モータ ガイド(O.T.1,O.T.2) 原点
D 150 150 150 D
130 Vmax. (0 〜 Vmax.) (径) 原点前 (ORG)
2 69 1 mm mm/sec sec kg mm mm mm mm mm mm ×10−4kg・m2 (PORG1) kg
NBL 50-5M/J 50 200 0.2 368.5 4K-M564 フォトマイクロ
-AC/J 500 0.4 376.2 300 48.5
56.2 75 35 4-M6用 0.201
0.197 MQMF012L1A2 エンコーダZ相 10.0
NBL100-5M/J 100 200 0.2 428.5 .5 0.220 4K-M564 フォトマイクロ
-AC/J 500 0.4 436.2 360 48
56.2 30 40 0.217 MQMF012L1A2 エンコーダZ相 11.0
NBL150-5M/J 150 200 0.2 488.5 48.5 6-M6用 0.240 4K-M564 フォトマイクロ 11.5
-AC/J 500 0.4 496.2 420 56.2 60 45 0.236 MQMF012L1A2 エンコーダZ相 12 .0
NBL200-5M/J 200 200 0.2 548.5 8.5 0.259 4K-M564 フォトマイクロ 12.5
-AC/J 500 0.4 556.2 480 4
56.2 15 50 0.256 MQMF012L1A2 エンコーダZ相 13 .0
O.T.2センサ PORG1センサ 16 16
O.T.1センサ 50 斜線部 36.5
ORGセンサ NBL 250-5M/J 250 200 0.2 608.5 5 0.278 4K-M564 フォトマイクロ
ジャバラ範囲 72 -AC/J 500 0.4 616.2 540 48.
56.2 45 55 8-M6用 0.275 MQMF012L1A2 エンコーダZ相 13.5
NBL300-5M/J 300 200 0.2 668.5 48.5 0.298 4K-M564 フォトマイクロ
-AC/J 500 0.4 676.2 600 56.2 75 60 0.294 MQMF012L1A2 ミニ エンコーダZ相 14.5
E 1/2S 180 1/2S E NBL350-5M/J 350 200 0.2 0.317 4K-M564 チュア
※モ-タ-コネクタ -AC/J 500 0.4 50 728.5 48.5
736.2 660 56.2 30 10
65 0.314 MQMF012L1A2 リニア フォトマイクロ フォトマイクロ 15.5
ガイド エンコーダZ相
NBL400-5M/J 200 0.2 10-M6用(φ15)
0.337 4K-M564 呼び15 フォトマイクロ
-AC/J 400 788.5
500 0.4 796.2 720 48.5
56.2 60 70 0.333 MQMF012L1A2 エンコーダZ相 16.5
NBL450-5M/J 450 200 0.2 858.5 0.356 4K-M564 フォトマイクロ
※部モ-タ-コネクタはステッピングモ-タ-タイプに適用します センサ-コネクタ -AC/J 500 0.4 866.2 790 48.5
56.2 20 80 0.352 MQMF012L1A2 エンコーダZ相 17.5
NBL500-5M/J 500 200 0.2 928.5 8.5 12-M6用 0.375 4K-M564 フォトマイクロ
-AC/J 500 0.4 936.2 860 4
56.2 55 90 0.372 MQMF012L1A2 エンコーダZ相 18.5
NBL600-5M/J 600 200 0.2 1,048.5 8.5 0.450 4K-M564 フォトマイクロ
-AC/J 500 0.4 1,056.2 980 4
56.2 40 100 14-M6用 0.446 MQMF012L1A2 エンコーダZ相 21.0
NBL700-5M/J 700 200 0.2 1,178.5 0.494 4K-M564 フォトマイクロ ポ
-AC/J 500 0.4 1,186.2 1,110 48.5
56.2 30 115 16-M6用 0.490 MQMF012L1A2 エンコーダZ相 23.0
ジ
NBL800-5M/J 800 200 0.2 1,308.5 5 0.533 4K-M564 フォトマイクロ シ
ョ
-AC/J 500 0.4 1,316.2 1,240 48.
56.2 20 130 18-M6用 0.529 MQMF012L1A2 エンコーダZ相 25.0
ニ
ン
イナーシャはボールネジ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。 グ
水平可搬質量は加減速時間により変化します。 テ
ACサーボモータの電源はAC100V仕様も選択できます。 ー
ブ
ル
最小送り量
分解能 pluse/rev 1,000* 2,000 5,000 10,000
最小送り量 mm 0.01 0.005 0.002 0.001
* 出荷時の設定
表記以外の設定も可能です。NBまでお問い合わせください。
H-18 H-19
130
2 60
15 40
190
155
180
210
Page11
POSITIONING TABLE
NX2L形 NX2L形
−カバー付き− −カバー無し−
L L
10 La 15 99 La 15 99
250
6-M8 深さ16 250 100
100 100
(ワーク取付用) ACサーボモータ 30 44.5 8-M8深さ16 90 90 88
ACサーボモータ
(ワーク取付用) 18 44.5
MSME042G1A MSME042G1A
(Panasonic) (Panasonic)
2×N-φ9キリ通し
2×N-φ9キリ通し
50センサードグ幅 200 φ14ザグリ深さ1.5 2.5
ステージ取付用) 50センサードグ幅 200 φ14ザグリ深さ1.5
P (N-1)×200 (
P P (N-1)×200 P (ステージ取付用)
O.T.2センサ PORGセンサ O.T.1センサ O.T.2センサ PORGセンサ O.T.1センサ
EE-SX474(オムロン) EE-SX474(オムロン) EE-SX474(オムロン) EE-SX474(オムロン) EE-SX474(オムロン) EE-SX474(オムロン)
40 1/2有効ストローク (250) 1/2有効ストローク 40 40 1/2有効ストローク (250) 1/2有効ストローク 40
有効 最高 加減速 水平 主要寸法 ボール センサ 質量 有効 最高 加減速 水平 主要寸法 ボール センサ 質量
ストロ−ク 速度 時間 可搬 L La P N ねじ イナーシャ ストロークエンド ストロ−ク 速度 時間 可搬 L La P N ねじ イナーシャ ストロークエンド
呼び番号 質量 リード モータ ガイド (O.T.1,O.T.2) 原点 呼び番号 質量 リード モータ ガイド (O.T.1,O.T.2) 原点
Vmax.(0 〜 Vmax.) (径) 原点前 (ORG) Vmax.(0 〜 Vmax.) (径) 原点前 (ORG)
mm mm/sec sec kg mm mm mm mm ×10−⁴kg・m² (PORG) kg mm mm/sec sec kg mm mm mm mm ×10−⁴kg・m² (PORG) kg
NX2L 300-AC/C 300 754 630 115 3 0.865× 10−⁴ 27 NX2L 300-AC 300 744 630 115 3 0.839× 10−⁴ 22
NX2L 400-AC/C 400 854 730 65 − NX2L 400-AC 400 844 730 65
C/C 500 954 830 115 4 0.988× 10 ⁴ 29 4 0.961× 10−⁴ 25 ポ
NX2L 500-A 1.11 ×10−⁴ 32 NX2L 500-AC 500 944 830 115 1.08 ×10−⁴ ジ
NX2L 600-AC/C 600 1,054 930 65 −⁴ 高剛性 27
5 10 1.23 ×10−⁴ 高剛性 NX2L 600-AC 600 29 シ
X2L 700-AC/C 700 500 0.4 100 34
NX2L 700-AC 700 500 0.4 100 1,044 930 65
1,144 1,030 115 5 10 1.21 ×10 ョ
N 1,154 1,030 115 (φ20) 1.36 ×10−⁴ MSME042G1Aリニアガイド フォトマイクロ エンコーダZ相 6 (φ20) 1.33 ×10−⁴ MSME042G1Aリニアガイド フォトマイクロ エンコーダZ相 31 ニ
NX2L 800-AC/C 800 1,254 1,130 65 − 呼び25 3
NX2L 800-AC 800 1,244 1,130 65 呼び25
AC/C 900 1,354 1,230 115 6 1.48 ×10 ⁴ 39 ン
グ
NX2L 900- 1.60 ×10−⁴ 41 AC 900 1,344 1,230 115 6 1.45 ×10−⁴ 33
NX2L 900- 1.57 ×10−⁴ 35 テ
NX2L 1000-AC/C 1,000 1,454 1,330 65 7 1.72 ×10−⁴ 44 NX2L 1000-AC 1,000 1,444 1,330 65 7 1.70 ×10−⁴ 37 ー
ブ
イナーシャはボールねじ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。 イナーシャはボールねじ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。 ル
水平可搬質量は加減速時間により変化します。 水平可搬質量は加減速時間により変化します。
ACサーボモータの電源はAC200V仕様のみとなります。 ACサーボモータの電源はAC200V仕様のみとなります。
H-20 H-21
240
126
260
19 19
15
20 220 20
90 90
126
220
15 220
235
Page12
POSITIONING TABLE
NX3L形 NX3L形
−カバー付き− −カバー無し−
L ACサーボモータ L
MSME082G1A
15 La 15112 La 15 112
(Panasonic)
6-M8深さ16 120 8-M8深さ16 125 125 105
125 125 ACサーボモータ
34 55 (ワーク取付用) 55
(ワーク取付用) MSME082G1A
(Panasonic)
ストローク1200~
ストローク1200~ 1600の場合の形状
1600の場合の形状 (2点鎖線)
(2点鎖線)
2×N-φ9キリ通し
50センサードグ幅 2×N-φ9キリ通し
50センサードグ幅 250 φ14ザグリ深さ9 2.5 250 19
φ14ザグリ深さ9 2.5
P (N-1)×250 P (ステージ取付用) P (N-1)×250 P (ステージ取付用)
O.T.2センサ PORGセンサ O.T.1センサ O.T.2センサ PORGセンサ O.T.1センサ
EE-SX474(オムロン) EE-SX474(オムロン) EE-SX474(オムロン) 有効ストローク 有効ストローク
300~1000 1200~1600 EE-SX474(オムロン) EE-SX474(オムロン) EE-SX474(オムロン)
40 1/2有効ストローク 300 1/2有効ストローク 40 (トップカバー形状が 40 1/2有効ストローク 300 1/2有効ストローク 40
異なります)
有効 最高 加減速 水平 主要寸法 ボール センサ 質量 有効 最高 加減速 水平 主要寸法 ボール センサ 質量
ストロ−ク 速度 時間 可搬 L La P N ねじ イナーシャ ストロークエンド ストロ−ク 速度 時間 可搬 L La P N ねじ イナーシャ ストロークエンド
呼び番号 質量 リード モータ ガイド (O.T.1,O.T.2) 原点 呼び番号 質量 リード モータ ガイド (O.T.1,O.T.2) 原点
Vmax.(0 〜 Vmax.) (径) 原点前 (ORG) Vmax.(0 〜 Vmax.) (径) 原点前 (ORG)
mm mm/sec sec kg mm mm mm mm ×10−⁴kg・m² (PORG) kg mm mm/sec sec kg mm mm mm mm ×10−⁴kg・m² (PORG) kg
NX3L 300-AC/C 300 822 680 90 3 1.84×10−⁴ 46 NX3L 300-AC 300 807 680 90
NX3L 400-AC/C 400 922 780 140 2.14×10−⁴ 50 3 1.75×10−⁴ 37
NX3L 400-AC 400 907 780 140 2.05×10−⁴ 40
NX3L 500-AC/C 500 1,022 880 65 4 2.44×10−⁴ 54 NX3L 500-AC 500 1,007 880 65 4 2.34×10−⁴ 43 ポ
NX3L 600-AC/C 600 1,122 980 115 2.74×10−⁴ 57 NX3L 600-AC 600 1,107 980 115 2.64×10−⁴ 46 ジ
シ
NX3L 700-AC/C 700 400 1,222 1,080 40
5 10 3.05×10−⁴ 高剛性 61 NX3L 700-AC 700 1,207 1,080 40
5 10 2.94×10−⁴ 高剛性 50 ョ
NX3L 800-AC/C 800 0.4 100 1,322 1,180 90 3.35×10−⁴ 65 NX3L 800-AC 800 400 0.4 100 1,307 1,180 90 ニ
NX3L 900-AC/C 900 1,422 1,280 140 (φ25) MSME082G1A リニアガイド フォトマイクロ エンコーダZ相
3.65×10−⁴ 呼び30 69 (φ25)3.24×10−⁴ MSME082G1A リニアガイド フォトマイクロ エンコーダZ相 53
NX3L 900-AC 900 1,407 1,280 140 3.54×10−⁴ 呼び30 56 ン
グ
NX3L 1000-AC/C 1,000 1,522 1,380 65 6 3.95×10−⁴ 73 NX3L1000-AC 1,000 1,507 1,380 65 6 3.84×10−⁴ 59 テ
NX3L 1200-AC/C 1,200 1,722 1,580 40 ー
7 4.56×10−⁴ 81 NX3L1200-AC 1,200 1,707 1,580 40 7 4.44×10−⁴ 66 ブ
NX3L 1400-AC/C 1,400 1,922 1,780 140 5.16×10−⁴ 88 NX3L1400-AC 1,400 1,907 1,780 140 5.04×10−⁴ 72 ル
NX3L 1600-AC/C 1,600 300 2,122 1,980 115 8 5.77×10−⁴ 96 NX3L1600-AC 1,600 300 2,107 1,980 115 8 5.63×10−⁴ 78
イナーシャはボールねじ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。 イナーシャはボールねじ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。
水平可搬質量は加減速時間により変化します。 水平可搬質量は加減速時間により変化します。
ACサーボモータの電源はAC200V仕様のみとなります。 ACサーボモータの電源はAC200V仕様のみとなります。
H-22 H-23
340
3 □80 20 210
12
115
370
24 24
15
25 320 25
125 125
3 □80 5 210
12
100
320
15 320
335
Page13
POSITIONING TABLE
NPT形
−標準形−
N-取付穴 有効 最高 加減速 水平 主要寸法 ボール イナーシャ センサ 質量
O.T.1センサ ストローク 速度 時間 可搬 A B M D N- ねじ ストロークエンド
O.T.2センサ PORG2センサ A PORG1センサ ORGセンサ 呼び番号 質量 取付穴 リード モータ ガイド (O.T.1,O.T.2) 原点
B 10 M センサーコネクタ Vmax. (0 〜 Vmax.) (径) 原点前 (ORG)
D 300 300 D ※モーターコネクタ mm mm/sec sec kg mm mm mm mm mm ×10−4kg・m2 (PORG1, PORG2) kg
90
4-M8深さ20 150 20 20 NPT 300-5M 64.5 21K-M596 フォトマイクロ
-AC 300 200 0.2 644.5
500 0.4 679 570 99 135 4-M8用 1.12
1.21 MSMF042L1A2 エンコーダZ相 44
NPT 400-5M 0 0.2 744.5 64.5 24 21K-M596 フォトマイクロ
-AC 400 20
500 0.4 779 670 99 35 1.
1.34 MSMF042L1A2 エンコーダZ相 48
NPT 500-5M 844.5 64.5 21K-M596 フォトマイクロ
-AC 500 200 0.2
500 0.4 879 770 99 85 6-M8用 1.36
1.46 MSMF042L1A2 エンコーダZ相 53
NPT 600-5M 0 0.2 944.5 64.5 1.48 21K-M596 高剛性 フォトマイクロ
-AC 600 20
500 0.4 58
200 979 870 99 135 10 1.58 MSMF042L1A2 リニア エンコーダZ相
44.5 NPT 700-5M 0.2 1,044.5 64.5 (φ20) 1.61 21K-M596 ガイド フォトマイクロ フォトマイクロ
-AC 700 200
500 0.4 1,079 970 99 35 1.70 MSMF042L1A2 呼び30 エンコーダZ相 63
NPT 800-5M 0.2 1,144.5 64.5 1.73 21K-M596 フォトマイクロ
-AC 800 200
500 0.4 1,179 1,070 99 85 8-M8用 1.83 MSMF042L1A2 エンコーダZ相 68
NPT 900-5M 00 0.2 1,244.5 64.5 .85 21K-M596 フォトマイクロ
25 1/2S 220 1/2S 25 -AC 900 2
500 0.4 1,279 1,170 99 135 1
1.95 MSMF042L1A2 エンコーダZ相 72
NPT1000-5M 1,344.5 64.5 21K-M596 フォトマイクロ
-AC 1,000 200 0.2
500 0.4 1,379 1,270 99 35 10-M8用 1.98
2.07 MSMF042L1A2 エンコーダZ相 77
イナーシャはボールネジ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。
水平可搬質量は加減速時間により変化します。
※部モ-タ-コネクタはステッピングモ-タ-タイプに適用します ACサーボモータの電源はAC100V仕様も選択できます。
最小送り量
分解能 pluse/rev 1,000* 2,000 5,000 10,000
最小送り量 mm 0.01 0.005 0.002 0.001 ポ
* 出荷時の設定 ジ
表記以外の設定も可能です。NBまでお問い合わせください。 シ
ョ
ニ
ン
グ
テ
ー
ブ
ル
H-24 H-25
160
5 40 40 10
220
157
200
220
Page14
POSITIONING TABLE
NPT形
−カバータイプ−
N-取付穴 有効 最高 加減速 水平 主要寸法 ボール イナーシャ センサ 質量
O.T.1センサ ストローク 速度 時間 可搬 A B M D N- ねじ ストロークエンド
O.T.2センサ PORG2センサ A PORG1センサ ORGセンサ 呼び番号 質量 取付穴 リード モータ ガイド (O.T.1,O.T.2) 原点
10 B 10 M センサーコネクタ Vmax. (0 〜 Vmax.) (径) 原点前 (ORG)
D 300 300 D ※モーターコネクタ
100 mm mm/sec sec kg mm mm mm mm mm ×10−4kg・m2 (PORG1, PORG2) kg
4-M8深さ20 150 75 30 20 NPT 300-5M/C 300 200 0.2 654.5 64.5 21K-M596 フォトマイクロ
-AC/C 500 0.4 689 570 99 135 4-M8用 1.13
1.23 MSMF042L1A2 エンコーダZ相 49
NPT 400-5M/C 400 200 0.2 754.5 64.5 1.25 21K-M596 フォトマイクロ
-AC/C 500 0.4 789 670 99 35 1.35 MSMF042L1A2 エンコーダZ相 54
NPT 500-5M/C 500 200 0.2 854.5 64.5 21K-M596 フォトマイクロ
-AC/C 500 0.4 889 770 99 85 6-M8用 1.37
1.47 MSMF042L1A2 エンコーダZ相 59
NPT 600-5M/C 600 200 0.2 954.5 64.5 50 21K-M596 高剛性 フォトマイクロ
-AC/C 500 0.4 99 135 1.
10 1.59 MSMF042L1A2 リニア エンコーダZ相 64
NPT 700-5M/C 200 0 989 870
64.5 20) 1.62 21K-M596 ガイド フォトマイクロ フォトマイクロ
44.5
-AC/C 700 0.2 20 1,054.5
500 0.4 1,089 970 99 35 (φ
1.72 MSMF042L1A2 呼び30 エンコーダZ相 69
NPT 800-5M/C 800 200 0.2 1,154.5 64.5 21K-M596 フォトマイクロ
-AC/C 500 0.4 1,189 1,070 99 85 8-M8用 1.74
1.84 MSMF042L1A2 エンコーダZ相 74
25 1/2S 220 1/2S 25 NPT 900-5M/C 900 200 0.2 1,254.5 64.5 6 21K-M596 フォトマイクロ
-AC/C 500 0.4 1,289 1,170 99 135 1.8
1.96 MSMF042L1A2 エンコーダZ相 79
NPT1000-5M/C 1,000 200 0.2 1,354.5 64.5 21K-M596 フォトマイクロ
-AC/C 500 0.4 1,389 1,270 99 35 10-M8用 1.99
2.08 MSMF042L1A2 エンコーダZ相 85
イナーシャはボールねじ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。
水平可搬質量は加減速時間により変化します。
※部モ-タ-コネクタはステッピングモ-タ-タイプに適用します ACサーボモータの電源はAC100V仕様も選択できます。
最小送り量
分解能 pluse/rev 1,000* 2,000 5,000 10,000
最小送り量 mm 0.01 0.005 0.002 0.001 ポ
* 出荷時の設定 ジ
表記以外の設定も可能です。NBまでお問い合わせください。 シ
ョ
ニ
ン
グ
テ
ー
ブ
ル
H-26 H-27
160
5 40 40 10
20 137 20
200
220
2.5 223.2 2.5
Page15
POSITIONING TABLE
NPT形
−ジャバラタイプ−
N-取付穴 有効 最高 加減速 水平 主要寸法 ボール イナーシャ センサ 質量
PORG2センサ O.T.1センサ
O.T.2センサ ストローク 速度 時間 可搬 A B M D E N- ねじ ストロークエンド
A PORG1センサ ORGセンサ
センサーコネクタ 呼び番号 質量 取付穴 リード モータ ガイド (O.T.1,O.T.2) 原点
10 B 10 M ※モーターコネクタ Vmax. (0 〜 Vmax.) (径) 原点前 (ORG)
D 300 300 D 90 mm mm/sec sec kg mm mm mm mm mm mm ×10−4kg・m2 (PORG1, PORG2) kg
4-M8深さ20 150 75 20 20 NPT 300-5M/J 300 200 0.2 704.5 64.5 3 21K-M596 フォトマイクロ
-AC/J 500 0.4 739 620 99 10 50 1.1
1.28 MSMF042L1A2 エンコーダZ相 51
NPT 400-5M/J 400 200 0.2 824.5 64.5 21K-M596 フォトマイクロ
-AC/J 500 0.4 859 740 99 70 60 6-M8用 1.25
1.40 MSMF042L1A2 エンコーダZ相 57
NPT 500-5M/J 500 200 0.2 944.5 64.5 21K-M596 フォトマイクロ
-AC/J 500 0.4 979 860 99 130 70 1.38
1.52 MSMF042L1A2 エンコーダZ相 63
NPT 600-5M/J 600 200 0.2 1,064.5 64.5 21K-M596 高剛性 フォトマイクロ
-AC/J 500 0.4 1,099 980 99 40 80 1.50
10 MSMF042L1A2 リニア エンコーダZ相 68
44.5 NPT 700-5M/J 700 200 0.2 200 1,184.5 フォトマイクロ
-AC/J 500 0.4 1,219 1,100 5 8-M8用 1.65
64. 1.62 21K-M596 ガイド フォトマイクロ
99 100 90 (φ20)
1.77 MSMF042L1A2 呼び30 エンコーダZ相 74
NPT 800-5M/J 800 200 0.2 1,304.5 64.5 21K-M596 フォトマイクロ
-AC/J 500 0.4 1,339 1,220 99 10 100 1.74
1.89 MSMF042L1A2 エンコーダZ相 80
NPT 900-5M/J 900 200 0.2 1,424.5 64.5 21K-M596 フォトマイクロ
E 1/2S 220 1/2S E -AC/J 500 0.4 1,459 1,340 99 70 110 10-M8用 1.87
2.01 MSMF042L1A2 エンコーダZ相 86
NPT1000-5M/J 1,000 200 0.2 1,544.5 64.5 21K-M596 フォトマイクロ
-AC/J 500 0.4 1,579 1,460 99 130 120 1.99
2.14 MSMF042L1A2 エンコーダZ相 91
イナーシャはボールネジ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。
水平可搬質量は加減速時間により変化します。
※部モ-タ-コネクタはステッピングモ-タ-タイプに適用します ACサーボモータの電源はAC100V仕様も選択できます。
最小送り量
分解能 pluse/rev 1,000* 2,000 5,000 10,000
最小送り量 mm 0.01 0.005 0.002 0.001 ポ
* 出荷時の設定 ジ
表記以外の設定も可能です。NBまでお問い合わせください。 シ
ョ
ニ
ン
グ
テ
ー
ブ
ル
H-28 H-29
160
5 40 40 17.5
235
220(ワーク取付面)
157
200
220
Page16
POSITIONING TABLE
NSL形
4-M6深さ12 N-取付穴 有効 最高 加減速 水平 主要寸法 ボール イナーシャ センサ 質量
A ストローク 速度 時間 可搬 A B M D N- ねじ ストロークエンド
B 10 M 82 呼び番号 質量 取付穴 リード モータ ガイド (O.T.1,O.T.2) 原点
D 200 200 D 43
120 16 16 Vmax. (0 〜 Vmax.) (径) 原点前 (ORG)
mm mm/sec sec kg mm mm mm mm mm ×10−4kg・m2 (PORG1) kg
NSL 50-5M 50 200 0.2 338.5 4K-M564 フォトマイクロ
-AC 500 0.4 346.2 280 48.5
56.2 40 0.197
0.190 MQMF012L1A2 エンコーダZ相 9.0
NSL100-5M 100 200 0.2 388.5 4K-M564 フォトマイクロ
-AC 500 0.4 396.2 330 48.5
56.2 65 4-M6用 0.216
0.210 MQMF012L1A2 エンコーダZ相 10.0
NSL150-5M 150 200 0.2 438.5 4K-M564 フォトマイクロ 10.5
-AC 500 0.4 446.2 380 48.5
56.2 90 0.236
0.229 MQMF012L1A2 エンコーダZ相 11 .0
NSL200-5M 200 200 0.2 488.5 4K-M564 フォトマイクロ
モーターコネクタ -AC 500 0.4 496.2 430 48.5
56.2 15 0.255
0.248 MQMF012L1A2 エンコーダZ相 11.5
NSL250-5M 250 200 0.2 538.5 4K-M564 フォトマイクロ
-AC 500 0.4 546.2 480 48.5
56.2 40 0.275
MQMF012L1A2 エンコーダZ相 12.5
O.T.2センサ センサ-コネクタ 32 2
O.T.1センサ ORGセンサ NSL300-5M 200 6-M6用 0.268
4K-M564 フォトマイクロ
PORG1センサ -AC 300 0.2 588.5
500 0.4 596.2 530 48.5
56.2 65 0.294
0.287 MQMF012L1A2 エンコーダZ相 13.5
NSL350-5M 350 200 0.2 4K-M564
10 1/2S 170 1/2S 50 -AC 500 50 638.5 10
0.4 646.2 580 48.5
56.2 90 0.313
(φ15) 0.307 MQMF012L1A2 CD20 フォトマイクロ フォトマイクロ
エンコーダZ相 14.0
NSL400-5M 400 200 0.2 688.5 4K-M564 フォトマイクロ
-AC 500 0.4 696.2 630 48.5
56.2 15 0.333
0.326 MQMF012L1A2 エンコーダZ相 15.0
NSL450-5M 450 200 0.2 738.5 4K-M564 フォトマイクロ
-AC 500 0.4 746.2 680 48.5
56.2 40 8-M6用 0.352
0.345 MQMF012L1A2 エンコーダZ相 16.0
NSL500-5M 500 200 0.2 788.5 4K-M564 フォトマイクロ 16.5
-AC 500 0.4 796.2 730 48.5
56.2 65 0.372
0.365 MQMF012L1A2 エンコーダZ相 17 .0
NSL600-5M 600 200 0.2 888.5 0.410 4K-M564 フォトマイクロ
-AC 500 0.4 896.2 830 48.5
56.2 15 0.403 MQMF012L1A2 エンコーダZ相 18.5
NSL700-5M 200 10-M6用
700 0.2 988.5 0.449 4K-M564 フォトマイクロ ポ
-AC 500 0.4 996.2 930 48.5
56.2 65 0.442 MQMF012L1A2 エンコーダZ相 20.0
ジ
NSL800-5M 800 200 0.2 1,088.5 0.488 4K-M564 フォトマイクロ シ
ョ
-AC 500 0.4 1,096.2 1,030 48.5
56.2 15 12-M6用 0.481 MQMF012L1A2 エンコーダZ相 22.0
ニ
ン
イナーシャはボールネジ、カップリングとテーブル可動部を含めたモータ軸換算イナーシャです。モーターロータのイナーシャは含みません。 グ
水平可搬質量は加減速時間により変化します。 テ
ACサーボモータの電源はAC100V仕様も選択できます。 ー
ブ
ル
最小送り量
分解能 pluse/rev 1,000* 2,000 5,000 10,000
最小送り量 mm 0.01 0.005 0.002 0.001
* 出荷時の設定
表記以外の設定も可能です。NBまでお問い合わせください。
H-30 H-31
150
200
186
28 200
Page17
POSITIONING TABLE
技術資料
1.分解能 表H-1 ドライバ励磁方式と分割数 3.モータ選定法 図H-10 ボールねじ駆動
分解能とは1パルス当りのテーブル移動量(最小送り モータ形式 ドライバ 分割数 特殊形状テーブル等でモータを選定する場合、以下の
量)のことをいい、ボールねじリードとモータ1回転当り 励磁方式 パルス/rev 資料を参考にしてください。
の分割数によって求めます。 2相励磁 200 図H-10にボールねじ駆動の代表例を示します。 F2
2相ステッピングモータ
1〜2相励磁 400 ここで W1 :ワーク質量(kg) W1 モータ
W2 :テーブル可動部質量(kg) F1
⊿ℓ= P W2
f ………………………………(1)
r 4相励磁 500
5相ステッピングモータ F1 :テーブル進行方向に逆って押す力(N)
1〜2相励磁 1,000 F2 :テーブル移動時にかかる力(N)
⊿ℓ:分解能(mm)P:ボールねじリード(mm) D :ボールねじ代表径(mm) リードP
fr:モータ 1 回転当りの分割数(パルス /rev) 表H-2 ドライバてい数と分割数(例) ℓ :ボールねじ全長(mm) ℓ
エンコーダ分割数 ドライバ 分割数 P :ボールねじリード(mm)
分割数モータ形式とドライバの組合わせによって異な パルス/rev てい倍 パルス/rev となります。
ります。 ●駆動方式
●ステッピングモータ 1てい倍 1,000
ポジショニングテーブルでは、イナーシャ(慣性力)が 図H-11 三角駆動
ステッピングモータの場合、分割数はドライバの励磁 1,000 2てい倍 2,000 働き、瞬時に速度を上げることができません。そのため加
方式によって決まります。(表H-1) 4てい倍 4,000 速時間を考えた駆動方式が使用されます。駆動方式に
●サーボモータ 1てい倍 2,500 は、距離移動によって三角移動、台形移動があります。 Vmax
サーボモータの場合、分割数はエンコーダ分割数とド ①三角駆動(図H-11) V
ライバの電気てい倍と分周比(電子ギア)によって決まり 2,500 2てい倍 5,000
三角駆動は短い距離の移動に使用されます。
ます。(表H-2) 4てい倍 10,000
2.最高速度と最高周波数 S=Vta= 1
2 Vtc ………………………(4)
最高速度は、ボールねじリードとモータ回転数によっ
て求めます。 最高周波数は最高速度と分解能によって求めます。 S:移動距離(mm)V:移動速度(mm/sec) ta ta
ta:加減速時間(sec)tc:位置決め時間(sec)
tc
Vmax= PN
60 ……………………………(2) fmax=Vmax ②台形駆動(図H-12)
⊿ℓ ……………………………(3)
台形駆動は長い距離の移動に使用されます。
Vmax:最高速度(mm/sec)N:モータ回転数(rpm) fmax:最高周波数(PPS)⊿ℓ:分解能(mm)
P:ボールねじリード(mm) Vmax:最高速度(mm/sec) S=V(ta+tb)=V(tc−ta)………………(5) 図H-12 台形駆動
したがって最高速度はパルスコントローラ、ドライバ等
の最高周波数に制限されることがあります。
S:移動距離(mm)V:移動速度(mm/sec) Vmax
ta:加減速時間(sec)tb:定速運転時間(sec)
表H-3 ボールねじリードと分解能及び最高速度 tc:位置決め時間(sec) V
最高 ボールねじリード mm ポ
●角速度と角加速度 ジ
分割数 周波数 2 4 5 10 20
使用モータ ①角速度 シ
分解能 最高速度 分解能 最高速度 分解能 最高速度 分解能 最高速度 分解能 最高速度 ョ
角速度は次式により求めます。 ニ
パルス/rev Kpps μm mm/sec μm mm/sec μm mm/sec μm mm/sec μm mm/sec ン
グ
200 6 10 20 25 50 100
2相 60 120 150 300 600 ω= 2πN = 2πV テ
60 P ……………………(6) ta tb ta ー
ステッピング 400 12 5 10 12.5 25 50 ブ
モータ 500 20 4 8 10 20 40 t ル
c
5相 80 160 200 400 800 ω:角速度(rad/sec)N:モータ回転数(rpm)
1,000 40 2 4 5 10 20 V:移動速度(mm/sec)P:ボールねじリード(mm)
500 25 4 8 10 20 40
②角加速度
1,000 50 2 100 4 200 5 250 10 500 20 1,000
サーボモータ 角加速度は次式により求めます。
2,000 100 1 2 2.5 5 10
4,000 100 0.5 50 1 100 1.25 125 2.5 250 5 500 dω
dt =ω1−ω0
⊿ℓ ……………………(7)
─dω
d─t :角加速度(rad/sec2)ω0:速度変化前の角速度(rad/sec)
ω1:速度変化後の角速度(rad/sec)
⊿t:速度変化に要する時間(sec)
H-32 H-33
φD
Page18
POSITIONING TABLE
●イナーシャ ●モータ起動トルク 図H-13 速度−トルク曲線
イナーシャはSI単位系ではkg・m2で表わされ、重力単 ③負荷イナーシャ(JR)とモーターロータのイナーシャ(JM) モータ起動トルクと所要トルクは次式の関係になります。
位系ではkgf・cm・sec2で表わされます。また重量と代 テーブルにはカップリング、エンコーダ、タコジェネ スルーイングトルク特性曲線
表系を用いたGD2値もイナーシャの代用として使用され レータ等の運動部品が取付きます。テーブル仕様にそっ
ます。それぞれの値は次式で変換できます。 て全ての運動部分のイナーシャを求めます。求めたイ TM≧κT ………………………………(17) ト
ナーシャの総和(モーターロータのイナーシャを除く)が ル
2 負荷イナーシャとなります。 ク
J=g・l×10−4= GD ータ起動トルク(N・m) κ:安全率
4 ………………(8) TM:モ
T:所要トルク(N・m) T TM
(N・m)
J:SI単位系のイナーシャ(kg・m2) JR=JA−JM=JT+JB+JN ……………(11) モータ起動トルクは、使用するモータとドライバの組
I:重力単位系のイナーシャ(kgf・cm・sec2) 合わせで異なります。
g:重力加速度(980cm/sec2) GD2:GD2値(kg・m2)
JR:負荷イナーシャ(kg・m2) ①ステッピングモータ
①直線運動部のイナーシャ(J JA:テーブルのモータ軸換算イナーシャ(kg・m2) ステッピングモータの場合、モータとドライバの組合 f
T) JM:モーターロータのイナーシャ(kg・m2)
直線運動部のイナーシャはワークの質量とテーブル可 わせの特性曲線(トルクカーブ)により求めます。モータ
JT:直線運動部のイナーシャ(kg・m2)
動部の質量で求めます。 JB:ボールねじのイナーシャ(kg・m2) 起動トルクは、モータの周波数fとスルーイングトルクの モータ周波数(f pps)
JN:その他の運動部分のイナーシャ(kg・m2) 曲線との交点のTMとなります。
②ACサーボモータ
JT=(W1+W ⎧P×10−3⎫2
2)・ 定
⎩ 2π ⎭……………(9) ④モータの仮選 ACサーボモータの場合は、モータの最大(ピーク)ト
負荷イナーシャとモーターロータのイナーシャの比率 ルクがTMとなります。
でモータのサイズの仮選定を行います。最適な比につい
JT:直線運動部のイナーシャ(kg・m2) W1:ワーク質量(kg) ては各モータの資料を参照してください。
W2:テーブル可動部質量(kg) P:ボールねじリード(mm) ●実効トルク 図H-14 実効トルク
サーボモータを使用する場合、実効トルクを算出し、
②ボールねじのイナーシャ(JB) 定格連続領域にあることを確認する必要があります。
ボールねじのイナーシャは次式で求めます。 JR≦KJM ………………………………(12)
12t1+T22t2+T32t3…+Ti2ti
RM= T
+t2+t3…+ti 速
J WB・D2 T
JM:モーターロータのイナーシャ(kg・m2
−6=πD4 ) t1
B= 8 ×10 32 ・ρ・ℓ×10−6 …(10) JR:負荷イナーシャ(kg・m2) K:イナーシャ比
= ΣTi2
度
ti …………………(18)
Σt ………
i V
JB:ボールねじのイナーシャ(kg・m2) (mm/sec)
W :ボールねじの質量(kg) D:ボールねじの代表径(mm) TRM:実効トルク(N・m)
B
ρ:ボールねじの密度(kg/mm3) ℓ:ボールねじの全長(mm)
ここで
t1 t3 t4 t6 t8
●所要トルク(T) t2 t5 t7 t9
モータの所要トルクには、加速トルク、摩擦トルク、負 ②摩擦トルク(Tμ) TRM<TR ………………………………(19) T1
荷トルク、ボールねじ起動トルクがあります。 摩擦トルクは次式で求めます。 ト T5 T7
ル ポ
TR:定格トルク(N・m) ク T ジ
T=Tα+Tμ+TL+TB ………………(13) Tμ=[9.8(W1+W P
2)+F2]μ 3 となります。 2
…… T6 T8 シ
2πη×10− ……(15) T ョ
(N・m) ニ
T4 ン
T:所要トルク(N・m) Tα:加速トルク(N・m) Tμ:摩擦トルク(N・m) W1:ワーク質量(kg) T グ
9
Tμ:摩擦トルク(N・m) TL:負荷トルク(N・m) W2:テーブル可動部質量(kg) T3 テ
ー
TB:ボールねじ起動(N・m) F2:テーブル移動時にかかる力(N) μ:動摩擦係数 時間(t sec) ブ
P:ボールねじリード(mm) η:ボールねじ効率 ル
①加速トルク(Tα)
加速トルクは次式で求めます。 ③負荷トルク(TL)
負荷トルクは次式で求めます。
T dω
α=J dω
A dt =(JR+JM)dt …………(14)
T F1P
L= −3
2πη×10 ……………………(16)
Tα:加速トルク(N・m)
JA:テーブル全体のイナーシャ(kg・m2) TL:負荷トルク(N・m) F1:外力(N)
JR:負荷イナーシャ(kg・m2) P:ボールねじリード(mm)η:ボールねじ効率
JM:モーターロータのイナーシャ(kg・m2)
─dω ④ボールねじ起動トルク(TB)
d─t :角加速度(rad/sec2)
ボールねじを起動するために必要なトルクです。
H-34 H-35
Page19
POSITIONING TABLE
NB ポジショニングテーブル制御システム パルスコントローラ仕様
●特長
1) ステッピングモータ使用の場合、オープンループ制御の 3) パルスコントローラはインデックス運転、プログラム運転、
ため装置構成が簡単です。ACサーボモータ使用の場 PCからのシリアル通信運転等多彩な運転モードが選択
合、セミクローズドループ制御のため、より確実な制御と できます。またプログラム運転では簡易的なシーケンスプ
なり、また高速対応が可能です。 ログラムも作成できます。(ステップ数64)
2) パルスコントローラ及びドライバは超小型であり、省スペー 4) 外部入力は、有接点・無接点入力どちらでも可能です。
ス化が図れます。
呼び番号 MR220AU
制御軸数 2軸
電源 24V
動作温度範囲 0〜45℃(結露しないこと)
外形寸法 高さ90mm×幅36mm×奥行き64mm
インデックスパルス登録数 各軸64
インデックスパルス設定範囲 -8,388,608〜8,388,607(相対値/絶対値指定可能)
ドライブ速度登録数 4
ドライブ速度設定範囲 1pps〜4Mpps(1〜8,000×倍率1〜500)
フォトマイクロセンサ 加減速カーブ 定速、直線加減速(台形)
・原点出し
・スキャンドライブ
動作モード ・連続ドライブ
Y X ・インデックスドライブ
・プログラムドライブ
・記憶媒体 EEPROM
・ステップ数 64
プログラム機能
・命令数 12命令
・パワーオンプログラム自動スタート機能有り ポ
・パラレル I/F ジ
シ
・RS-232C ョ
制御インターフェース ニ
・USB(USB規格V1.1に準拠) ン
グ
(PLC、PC、リモートボックスと通信可能) テ
パルスコントローラ ドライバ ー
汎用入力 最大5点(動作モードにより異なります) ブ
ル
汎用出力 2点(各軸1点)
操作プログラムの動作環境 IBM AT互換パソコン OS:Windouws10,8.1,7,Vista,XP
※オプションのリモートボックスでも操作可能です。
オプション
リモートボックス(PCに接続せずに操作、プログラムの作成が可能になります)
呼び番号 MR200RB
外径寸法 高さ62mm×幅150mm×奥行き23mm
・動作モード、パラメータ、プログラムの書き込み、ドライブ操作が可能
仕様
・現在位置書き込み(ティーチング)可能
※注 仕様は予告なく変更する事がありますのでご了承ください。
H-36 H-37
Page20
POSITIONING TABLE
5相ステッピングモータ・ドライバ仕様 ACサーボモータ・ドライバ仕様
【特長】 【特長】
1. AC100 〜 220V電源入力の5相ステッピングモータ用マイクロステップドラ 1. 高機能オートチューニングを搭載し、適応フィルタ機能や各種ゲインを自動で
イバです。 設定、調整できます。
2. 16種類のステップ角を設定できます。最大分割数は250分割125,000パル 2. 小型・軽量です。
ス/回転が可能です。 3. 高速・高応答です。
4. 位置、速度、トルク及び位置、速度、トルクのうちの2つの組合せから制御モー
3. 低振動機能によりフルステップ、ハーフステップ駆動時がさらに低振動になり ドを選択できます。
ます。 また、リニアスケールを用いたフルクローズ制御も可能です。(出荷時は位置制御)
4. 切替信号で2種類のマイクロステップ角が自由に使い分けできます。 5. 前面のデジタルパネルで制御状態をリアルタイムに表示します。また、操作
5. コネクタタイプのねじ式端子台で保守が容易です。 キーにより各種設定も容易に行えます。
6. 専用通信ソフト“PANATERM”をインストールしたパソコンと接続すること
により、モータ動作のモニタリングや設定が可能です。
7. ダイナミックブレーキを内蔵しています。
適用テーブル NCT50〜250 NCT300・NBL・NSL NPT 適用テーブル NCT NBL・NSL NPT
モータ分割数標準出荷時設定 1,000パルス/rev ※1 モータ分割数標準出荷時設定 ※1 1,000パルス/rev 1,000パルス/rev 1,000パルス/rev
型名 3K-S545 4K-M564 21K-M596 型名 MSMF012L1A2 MQMF012L1A2 MSMF042L1A2
モ
ー 電流(A/相) 0.75 1.4 1.4 定格出力(W) 100 100 400
タ ホールディングトルク(N・m) 0.24 0.44 2.06 定格トルク(N・m) 0.32 0.32 1.27
仕
様 ローターイナーシャ(×10−4kg・m2) 0.068 0.175 0.90 モ 最大トルク(N・m) 0.95 1.11 3.82
質量(kg) 0.31 0.5 1.8 ー 定格回転数(rpm) 3,000 3,000 3,000
タ
型名 KR-A535M 仕 最大回転数(rpm) 6,000 6,500 6,000
励磁方式 マイクロステップ 様 ローターイナーシャ(×10−4kg・m2) 0.048 0.15 0.27
マイクロステップ分割数 1、2、4、5、8、10、16、20、25、40、50、80、100、125、200、250 ロータ慣性モーメントに対する推奨負荷慣性モーメント比 30倍 20倍 30倍
電源入力 AC100V〜220V 3.5A ロータリエンコーダー 23ビットエンコーダ 23ビットエンコーダ 23ビットエンコーダ
ド 入 入力形態 正転パルス+逆転パルスまたは方向指令信号+パルス 質量(kg) 0.47 0.54 1.2
ラ
イ 力 電圧 H=4〜8V L=0〜0.5V 型名 MADLT05SF MADLT05SF MBDLT25SF
バ パ
ル 最高パルス周波数 500kpps
仕 制御方式 IGBT PWM方式 正弦波駆動
様 ス 内部抵抗 270Ω 電源入力 単相/三相 200V〜240V(100V仕様も御用意できます。※2)
分割数選択入力、モータ励磁OFF入力 入 入力形態 正転パルス+逆転パルス、方向指令信号+パルス、A相+B相
入出力信号 力
原点励磁出力 パ 入力方式 ラインドライバまたはオープンコレクタ 位
ル 置
オートカレントダウン 27〜90%(標準設定値 50%) ス 最高パルス周波数 8Mpps(オープンコレクタ使用時は500kpps) 制
使用温度、湿度 0〜40℃ 85%RH以下(結露なきこと) ド ロータリーエンコーダ分解能 223 パルス/rev(8,388,608 パルス/rev相当) 御
ポ
ラ 時
株式会社テクノドライブ製 ジ
イ の シ
※1:ドライバはNBにて初期設定を変更して出荷します。株式会社テクノドライブ様の出荷設定と異なる箇所があります。 バ 入力信号 偏差カウンタクリア、指令パルス禁止入力、制振制御切替
指令分周逓倍切替、トルクリミット切替、制御モード切替 仕 ョ
仕 様 ニ
様 位置決め完了、位置指令有無出力 ン
出力信号 グ
サーボアラーム出力、サーボレディ出力、ブレーキ解除出力など テ
ー
ブ
エンコーダーフィードバック出力 A・B相:ラインドライバ出力 ル
Z相:ラインドライバ出力、オープンコレクタ出力
保護機能 過電圧、不足電圧、過速度、過電流、オーバーロード、
オーバーヒート、過負荷、エンコーダ異常など
使用温度、湿度 0〜55℃ 20〜85%RH以下(結露なきこと)
パナソニック株式会社製
※1:ドライバはNBにて初期設定を変更して出荷します。パナソニック株式会社様の出荷設定と異なる箇所があります。
※2:100V仕様の場合は、モータ及びドライバ型名が異なります。
H-38 H-39