


アクチュエータのカタログです。
このカタログについて
| ドキュメント名 | アクチュエータ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.3Mb |
| 関連製品 | |
| 登録カテゴリ | |
| 取り扱い企業 | 日本ベアリング株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ACTUATOR
アクチュエータ アクチュエータBH形
特長・・・・・・・・・・・・・・・・・・・・・・・・・・・・ G-2 呼び番号の構成・ ・・・・・・・・・・・・・・・・・ G-82
BG・BHシリーズ一覧・・・・・・・・・・・・・・ G-4 仕様・・・・・・・・・・・・・・・・・・・・・・・・・・・・ G-84
寿命・・・・・・・・・・・・・・・・・・・・・・・・・・・・ G-6 許容速度と限界ストローク・・・・・・・・・・ G-85
アクチュエータBG形 精度・・・・・・・・・・・・・・・・・・・・・・・・・・・・ G-86
寸法表・・・・・・・・・・・・・・・・・・・・・・・・・・
呼び番号の構成・ ・・・・・・・・・・・・・・・・・ G-10 G-88〜
モータ取付部形状と適用モータ・ ・・・・
仕様・・・・・・・・・・・・・・・・・・・・・・・・・・・・ G-12 G-98
インローブラケットR0・ ・・・・・・・・・・・・許容速度と限界ストローク G-108
・・・・・・・・・・ G-13
精度・・・・・・・・・・・・・・・・・・・・・・・・・・・・ G-14 折り返し用プーリーユニット・・・・・・・・・ G-109
センサ・ ・・・・・・・・・・・・・・・・・・・・・・・・・
寸法表・・・・・・・・・・・・・・・・・・・・・・・・・・ G-16〜 G-111
PNPセンサ・・・・・・・・・・・・・・・・・・・・・・
モータ取付部形状と適用モータ・ ・・・・ G-32 G-117
位置決めピン用穴・・・・・・・・・・・・・・・・・
インローブラケットR0・ ・・・・・・・・・・・・ G-48 G-118
潤滑・・・・・・・・・・・・・・・・・・・・・・・・・・・・
折り返し用プーリーユニット・・・・・・・・・ G-50 G-122
ローハウジング・ ・・・・・・・・・・・・・・・・・・ G-52 アクチュエータ資料
ジャバラ・ ・・・・・・・・・・・・・・・・・・・・・・・・ G-54 取扱い上の注意・ ・・・・・・・・・・・・・・・・・ G-123
センサ・ ・・・・・・・・・・・・・・・・・・・・・・・・・ G-63 使用温度・・・・・・・・・・・・・・・・・・・・・・・・ G-123
PNPセンサ・・・・・・・・・・・・・・・・・・・・・・ G-74 潤滑・・・・・・・・・・・・・・・・・・・・・・・・・・・・ G-123
位置決めピン用穴・・・・・・・・・・・・・・・・・ G-75 センサ諸元・ ・・・・・・・・・・・・・・・・・・・・・ G-124
潤滑・・・・・・・・・・・・・・・・・・・・・・・・・・・・ G-80
2軸組合せブラケット ア
・・・・・・・・・・・・・・ G-81 ク
チ
ュ
エ
ー
タ
G-1
Page2
ACTUATOR
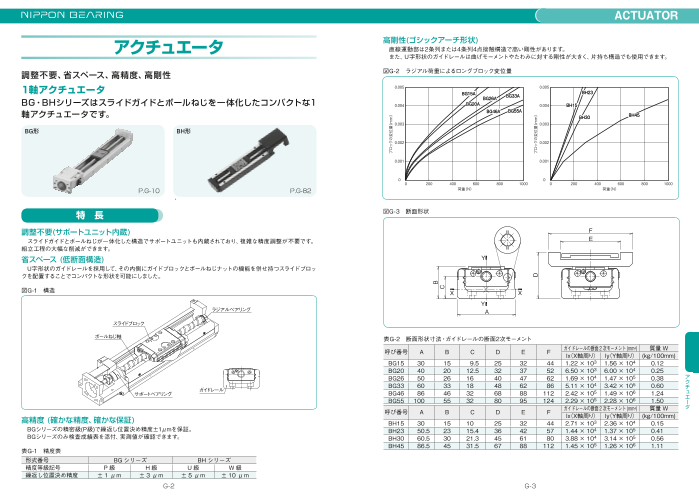
アクチュエータ 高剛性(ゴシックアーチ形状)
直線運動部は2条列または4条列4点接触構造で高い剛性があります。
また、U字形状のガイドレールは曲げモーメントやたわみに対する剛性が大きく、片持ち構造でも使用できます。
調整不要、省スペース、高精度、高剛性 図G-2 ラジアル荷重によるロングブロック変位量
1軸アクチュエータ 0.005 0.005
BG15A BH23
BG・BHシリーズはスライドガイドとボールねじを一体化したコンパクトな1 BG26A BG33A
0.004 BG20A 0.004 BH15
軸アクチュエータです。 BG46A BG55A
BH30 BH45
0.003 0.003
BG形 BH形
0.002 0.002
0.001 0.001
0 0
0 200 400 600 800 1000 0 200 400 600 800 1000
P.G-10 P.G-82 荷重(N) 荷重(N)
特 長 図G-3 断面形状
調整不要(サポートユニット内蔵) F
スライドガイドとボールねじが一体化した構造でサポートユニットも内蔵されており、複雑な精度調整が不要です。 E
組立工程の大幅な削減ができます。
省スペース (低断面構造) Y
U字形状のガイドレールを採用して、その内側にガイドブロックとボールねじナットの機能を併せ持つスライドブロッ
クを配置することでコンパクトな形状を可能にしました。
図G-1 構造 X X
Y
ラジアルベアリング A
スライドブロック
ボールねじ軸 表G-2 断面形状寸法・ガイドレールの断面2次モーメント
呼び番号 A B C D E F ガイドレールの断面 2 次モーメント (mm4) 質量 W
l(x X軸周り) l(y Y軸周り) (kg/100mm)
BG15 30 15 9.5 25 32 44 1.22 × 103 1.56 × 104 0.12
BG20 40 20 12.5 32 37 52 6.50 × 103 6.00 × 104 0.25
BG26 50 26 16 40 47 62 1.69 × 104 1.47 × 105 0.38 ア
BG33 60 33 18 48 62 86 5.11 × 104 3.42 × 105 ク
0.60
ガイドレール チ
サポートベアリング BG46 86 46 32 68 88 112 2.42 × 105 1.49 × 106 1.24 ュ
BG55 100 55 32 80 95 124 2.29 × 105 2.28 × 106 エ
1.50 ー
呼び番号 A B C D E F ガイドレールの断面 2 次モーメント (mm4) 質量 W タ
高精度 (確かな精度、確かな保証) l(x X軸周り) l(y Y軸周り) (kg/100mm)
BH15 30 15 10 25 32 44 2.71 × 103 2.36 × 104 0.15
BGシリーズの精密級(P級)で繰返し位置決め精度±1μmを保証。 BH23 50.5 23 15.4 36 42 57 1.44 × 104 1.37 × 105 0.41
BGシリーズのみ検査成績表を添付、実測値が確認できます。 BH30 60.5 30 21.3 45 61 80 3.88 × 104 3.14 × 105 0.56
BH45 86.5 45 31.5 67 88 112 1.45 × 105 1.26 × 106 1.11
表G-1 精度表
形式番号 BG シリーズ BH シリーズ
精度等級記号 P 級 H 級 U 級 W 級
繰返し位置決め精度 ± 1 μm ± 3 μm ± 5 μm ± 10 μm
G-2 G-3
ブロックの変位量(mm)
B
C
D ブロックの変位量(mm)
Page3
ACTUATOR
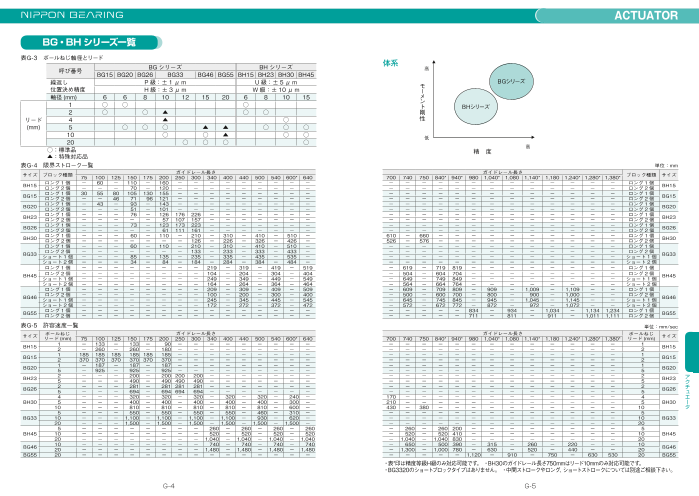
BG・BH シリーズ一覧
表G-3 ボールねじ軸径とリード
呼び番号 BG シリーズ BH シリーズ 体系
高
BG15 BG20 BG26 BG33 BG46 BG55 BH15 BH23 BH30 BH45
繰返し P 級:± 1 μ m U 級:± 5 μ m BGシリーズ
位置決め精度 H 級:± 3 μ m W 級:± 10 μ m モ
ー
軸径 (mm) 6 6 8 10 12 15 20 6 8 10 15 メ
1 ○ ○ ○ ン
ト BHシリーズ
2 ○ ○ ▲ ○ ○ 剛
リード 4 ▲ ○ 性
(mm) 5 ○ ○ ○ ▲ ▲ ○ ○ ○
10 ○ ○ ▲ ○ ○ 低
20 ○ ○ ○ ○
○:標準品 高
精 度
▲:特殊対応品
表G-4 限界ストローク一覧 単位:mm
サイズ ブロック種類 ガイドレール長さ ガイドレール長さ
75 100 125 150 175 200 250 300 340 400 440 500 540 600* 640 700 740 750 840* 940* 980 1,040* 1,080 1,140* 1,180 1,240* 1,280* 1,380* ブロック種類 サイズ
BH15 ロング 1 個 - 60 - 110 - 160 - - - - - - - - - - - - - - - - - - - - - - ロング 1 個
ロング 2 個 - - - 70 - 120 - - - - - - - - - - - - - - - - - - - - - - ロング 2 個 BH15
BG15 ロング 1 個 30 55 80 105 130 155 - - - - - - - - - - - - - - - - - - - - - - ロング 1 個
ロング 2 個 - - 46 71 96 121 - - - - - - - - - - - - - - - - - - - - - - ロング 2 個 BG15
BG20 ロング 1 個 - 43 - 93 - 143 - - - - - - - - - - - - - - - - - - - - - - ロング 1 個
ロング 2 個 - - - 51 - 101 - - - - - - - - - - - - - - - - - - - - - - ロング 2 個 BG20
BH23 ロング 1 個 - - - 76 - 126 176 226 - - - - - - - - - - - - - - - - - - - - ロング 1 個
ロング 2 個 - - - - - 57 107 157 - - - - - - - - - - - - - - - - - - - - ロング 2 個 BH23
BG26 ロング 1 個 - - - 73 - 123 173 223 - - - - - - - - - - - - - - - - - - - - ロング 1 個
ロング 2 個 - - - - - 61 111 161 - - - - - - - - - - - - - - - - - - - - ロング 2 個 BG26
BH30 ロング 1 個 - - - 60 - 110 - 210 - 310 - 410 - 510 - 610 - 660 - - - - - - - - - - ロング 1 個
ロング 2 個 - - - - - - - 126 - 226 - 326 - 426 - 526 - 576 - - - - - - - - - - ロング 2 個 BH30
ロング 1 個 - - - 60 - 110 - 210 - 310 - 410 - 510 - - - - - - - - - - - - - - ロング 1 個
BG33 ロング 2 個 - - - - - - - 133 - 233 - 333 - 433 - - - - - - - - - - - - - - ロング 2 個
ショート 1 個 - - - 85 - 135 - 235 - 335 - 435 - 535 - - - - - - - - - - - - - - ショート 1 個 BG33
ショート 2 個 - - - 34 - 84 - 184 - 284 - 384 - 484 - - - - - - - - - - - - - - ショート 2 個
ロング 1 個 - - - - - - - - 219 - 319 - 419 - 519 - 619 - 719 819 - - - - - - - - ロング 1 個
BH45 ロング 2 個 - - - - - - - - 104 - 204 - 304 - 404 - 504 - 604 704 - - - - - - - - ロング 2 個 BH45
ショート 1 個 - - - - - - - - 249 - 349 - 449 - 549 - 649 - 749 849 - - - - - - - - ショート 1 個
ショート 2 個 - - - - - - - - 164 - 264 - 364 - 464 - 564 - 664 764 - - - - - - - - ショート 2 個
ロング 1 個 - - - - - - - - 209 - 309 - 409 - 509 - 609 - 709 809 - 909 - 1,009 - 1,109 - - ロング 1 個
BG46 ロング 2 個 - - - - - - - - 100 - 200 - 300 - 400 - 500 - 600 700 - 800 - 900 - 1,000 - - ロング 2 個
ショート 1 個 - - - - - - - - 245 - 345 - 445 - 545 - 645 - 745 845 - 945 - 1,045 - 1,145 - - ショート 1 個 BG46
ショート 2 個 - - - - - - - - 172 - 272 - 372 - 472 - 572 - 672 772 - 872 - 972 - 1,072 - - ショート 2 個
BG55 ロング 1 個 - - - - - - - - - - - - - - - - - - - - 834 - 934 - 1,034 - 1,134 1,234 ロング 1 個
ロング 2 個 - - - - - - - - - - - - - - - - - - - - 711 - 811 - 911 - 1,011 1,111 ロング 2 個 BG55
表G-5 許容速度一覧 単位:mm/sec
サイズ ボールねじ ガイドレール長さ ガイドレール長さ ボールねじ
リード (mm) 75 100 125 150 175 200 250 300 340 400 440 500 540 600* 640 700 740 750 840* 940* 980 1,040* 1,080 1,140* 1,180 1,240* 1,280* 1,380* リード (mm) サイズ
BH15 1 - 133 - 133 - 90 - - - - - - - - - - - - - - - - - - - - - - 1
2 - 260 - 260 - 180 - - - - - - - - - - - - - - - - - - - - - - 2 BH15
BG15 1 185 185 185 185 185 185 - - - - - - - - - - - - - - - - - - - - - - 1
2 370 370 370 370 370 370 - - - - - - - - - - - - - - - - - - - - - - 2 BG15
BG20 1 - 187 - 187 - 187 - - - - - - - - - - - - - - - - - - - - - - 1
5 - 925 - 925 - 925 - - - - - - - - - - - - - - - - - - - - - - 5 BG20
BH23 2 - - - 200 - 200 200 200 - - - - - - - - - - - - - - - - - - - - 2 ア
5 - - - 490 - 490 490 490 - - - - - - - - - - - - - - - - - - - - 5 BH23
ク
BG26 2 - - - 281 - 281 281 281 - - - - - - - - - - - - - - - - - - - - 2 チ
5 - - - 694 - 694 694 694 - - - - - - - - - - - - - - - - - - - - 5 BG26 ュ
4 - - - 320 - 320 - 320 - 320 - 320 - 240 - 170 - - - - - - - - - - - - 4 エ
BH30 5 - - - 400 - 400 - 400 - 400 - 400 - 300 - 210 - - - - - - - - - - - - 5 BH30 ー
10 - - - 810 - 810 - 810 - 810 - 810 - 600 - 430 - 380 - - - - - - - - - - 10 タ
5 - - - 550 - 550 - 550 - 550 - 460 - 310 - - - - - - - - - - - - - - 5
BG33 10 - - - 1,100 - 1,100 - 1,100 - 1,100 - 930 - 620 - - - - - - - - - - - - - - 10 BG33
20 - - - 1,500 - 1,500 - 1,500 - 1,500 - 1,500 - 1,500 - - - - - - - - - - - - - - 20
5 - - - - - - - - 260 - 260 - 260 - 260 - 260 - 260 200 - - - - - - - - 5
BH45 10 - - - - - - - - 520 - 520 - 520 - 520 - 520 - 520 410 - - - - - - - - 10 BH45
20 - - - - - - - - 1,040 - 1,040 - 1,040 - 1,040 - 1,040 - 1,040 830 - - - - - - - - 20
BG46 10 - - - - - - - - 740 - 740 - 740 - 740 - 650 - 500 390 - 315 - 260 - 220 - - 10
20 - - - - - - - - 1,480 - 1,480 - 1,480 - 1,480 - 1,300 - 1,000 780 - 630 - 520 - 440 - - 20 BG46
BG55 20 - - - - - - - - - - - - - - - - - - - - 1,120 - 910 - 750 - 630 530 20 BG55
・表*印は精度等級H級のみ対応可能です。 ・BH30のガイドレール長さ750mmはリード10mmのみ対応可能です。
・BG3320のショートブロックタイプはありません。 ・中間ストロークやロング、ショートストロークについては別途ご相談下さい。
G-4 G-5
Page4
ACTUATOR
寿 命 A.1.a. 水平移動(水平設置)の場合のPT
i)等速運動時(PTC) 図G-4
BG・BH形では、ガイド部・ボールねじ部及びサポー 表G-6 接触係数(fC) PTC= 1n ・W+EP・MPL+EY・MYL+ER・MRL ………………………………(2)
トベアリング部の寿命をそれぞれ求め、もっとも短いも 1軸で密着して使用する
のを寿命とします。寿命の計算には以下の式を使用しま 接触係数(fC) Y X
ii)加速運動時(PTa)
す。 ブロックの個数
A. ガイド部の寿命 1 1.0 PTa= 1
n ・W+EP(MPL+m・αa・Z)+EY(MYL+m・αa・X)+ER・MRL ………(3) Z
ガイド部の寿命は以下のように計算してください。 2 0.81 但し(MPL+m・αa・Z), (MYL+m・αa・X)は値がマイナスの場合0とする W+m
3 iii)減速運動時(PTd)
LG=( fC C 表G-7 荷重係数(fW)
f ・P ・5
T) 0 …………………………(1)
W 使用条件
荷重係数(fW) PTd= 1
n ・W+EP(MPL+m・αd・Z)+EY(MYL+m・αd・X)+ER・MRL ………(4)
振動・衝撃 速度 本図のW+mと異なる方向からも荷重を受け
LG:寿命距離(km) fC:接触係数(表G-6参照) 但し(MPL+m・αd・Z), (MYL+m・αd・X)は値がマイナスの場合0とする る場合はNBまでお問い合わせください。
fW:荷重係数(表G-7参照) C:基本動定格荷重(N) 無 0.25m/s以下 1.0 〜 1.5
PT:ブロック1ヶにかかる計算荷重(N) 小 1m/s以下 1.5 〜 2.0 PTC:等速運動時ブロック1個にかかる計算荷重(N) PTa:加速運動時ブロック1個にかかる計算荷重(N)
PTd:減速運動時ブロック1個にかかる計算荷重(N) n:BG・BHのブロック数 W:負荷荷重(N) m:積載質量(kg)
大 1m/s以上 2.0 〜 3.5 αa:加速時の加速度(m/sec2) αd:減速時の加速度(m/sec2)(符号はマイナスとなります。)
X:BG・BH中心から積載質量重心までの距離(mm) Y:BG・BH中心から積載質量重心までの距離(mm)
Z:BG・BHボールねじ中心から積載質量重心までの距離(mm) EP:ピッチング方向のモーメント等価係数(表G-8参照)
EY:ヨーイング方向のモーメント等価係数(表G-8参照) ER:ローリング方向のモーメント等価係数(表G-8参照)
A.1. PTの計算 表G-8 モーメント等価係数 MPL:ピッチング方向の負荷モーメント(N・mm) MPL=W・Y
MYL:ヨーイング方向の負荷モーメント(N・mm) MYL=0(本使用方法の場合発生しません。)
式(1)にて寿命を計算する際には実際にかかるモーメ 呼び番号 EP(E2P) EY(E2Y) ER(E2R) MRL:ローリング方向の負荷モーメント(N・mm) MRL=W・X ※モーメントの方向は図G-8参照
ント負荷等を考慮し、ブロック1ヶにかかる計算荷重(PT) BG15□□A 2.82×10-1 2.37×10-1 9.35×10-2
を求める必要があります。
又、加速度が高い場合や、ショートストローク動作の BG15□□B 5.16×10-2 4.33×10-2 4.67×10-2 A.1.b. 水平移動(壁面設置)の場合のPT
場合、加速度を加味したPTの計算を行います。この加 BG20□□A 2.25×10-1 1.89×10-1 7.84×10-2 i)等速運動時(PTC) 図G-5
速度の計算はBG・BHに積載された質量に対し行われ BG20□□B 3.98×10-2 3.34×10-2 3.92×10-2
ます。 PTC= 1
BG26□□A 1.51×10-1 1.27×10-1 5.88×10-2 1.19・n・W+EP・MPL+EY・MYL+ER・MRL……………………………(5)
等速運動時、加速運動時、減速運動時の各計算荷
重を算出し、その平均荷重をPTとします。 BG26□□B 2.72×10-2 2.28×10-2 2.94×10-2 ii)加速運動時(PTa)
PTの計算は設置する条件に合わせ計算式を選択し、 BG33□□A 1.26×10-1 1.06×10-1 4.55×10-2
行ってください。 BG33□□B 2.20×10-2 1.84×10-2 2.27×10-2 PTa= 1
1.19・n・W+EP(MPL+m・αa・Z)+EY(MYL+m・αa・X)+ER・MRL …(6)
又、加速度を加味しない場合はPT=PTC(式(2)(、5)、 BG33□□C 2.31×10-1 1.94×10-1 4.55×10-2 但し(MPL+m・αa・Z), (MYL+m・αa・X)は値がマイナスの場合0とする Y
(8)参照)として計算できますが、概算値となりますの Z
で余裕を持った選定を推奨します。 BG33□□D 3.09×10-2 2.59×10-2 2.27×10-2
iii)減速運動時(PTd) X
BG46□□A 8.39×10-2 7.04×10-2 3.17×10-2
BG46□□B 1.56×10-2 1.31×10-2 1.59×10-2 PTd= 1 …(7) W+m
1.19・n・W+EP(MPL+m・αd・Z)+EY(MYL+m・αd・X)+ER・MRL 本図のW+mと異なる方向からも荷重を受け
BG46□□C 1.39×10-1 1.17×10-1 3.17×10-2 但し(MPL+m・αd・Z), (MYL+m・αd・X)は値がマイナスの場合0とする る場合はNBまでお問い合わせください。
BG46□□D 2.15×10-2 1.81×10-2 1.59×10-2
PTC:等速運動時ブロック1個にかかる計算荷重(N) PTa:加速運動時ブロック1個にかかる計算荷重(N)
BG55□□A 6.80×10-2 5.71×10-2 2.74×10-2 PTd:減速運動時ブロック1個にかかる計算荷重(N) n:BG・BHのブロック数 W:負荷荷重(N) m:積載質量(kg)
αa:加速時の加速度(m/sec2) αd:減速時の加速度(m/sec2)(符号はマイナスとなります。)
BG55□□B 1.35×10-2 1.14×10-2 1.37×10-2 X:BG・BH中心から積載質量重心までの距離(mm) Y:BG・BH中心から積載質量重心までの距離(mm)
BH15□□A 2.70×10-1 2.45×10-1 9.64×10-2 Z:BG・BHボールねじ中心から積載質量重心までの距離(mm) EP:ピッチング方向のモーメント等価係数(表G-8参照)
EY:ヨーイング方向のモーメント等価係数(表G-8参照) ER:ローリング方向のモーメント等価係数(表G-8参照)
BH15□□B 4.50×10-2 3.80×10-2 4.82×10-2 MPL:ピッチング方向の負荷モーメント(N・mm) MPL=0(本使用方法の場合発生しません。)
MYL:ヨーイング方向の負荷モーメント(N・mm) MYL=W・Y ア
BH23□□A 1.52×10-1 1.37×10-1 5.22×10-2
MRL:ローリング方向の負荷モーメント(N・mm) MRL=W・Z ※モーメントの方向は図G-8参照 ク
チ
BH23□□B 2.54×10-2 2.29×10-2 2.61×10-2 ュ
エ
BH30□□A 1.17×10-1 9.83×10-2 4.54×10-2 ー
タ
BH30□□B 1.95×10-2 1.64×10-2 2.27×10-2
BH45□□A 8.39×10-2 7.04×10-2 3.17×10-2
BH45□□B 1.56×10-2 1.31×10-2 1.59×10-2
BH45□□C 1.26×10-1 1.06×10-1 3.17×10-2
BH45□□D 2.10×10-2 1.76×10-2 1.59×10-2
※ブロック2個付き仕様は2個密着時の係数です。
G-6 G-7
Page5
ACTUATOR
A.1.c. 垂直移動の場合のPT B.1.a. 水平移動の場合 表G-9 ブロック単体の動摩擦抵抗(fb()サイドシール抵抗)
i)等速運動時(PTC) 図G-6 i)等速運動時(Pac) 単位:N
呼び番号 U/W
PTC=EP・MPL+EY・MYL+ER・MRL …………………………………………(8) Pac=μ・W+F+fb・n ………………………………(13) BH15 2.0
BH23 2.5
ii)加速運動時(PTa) ii)加速運動時(Paa)
X BH30 2.5
PTa=EP(MPL+m・αa・Z)+EY(MYL+m・αa・X)+ER・MRL …………………(9) Paa=μ・W+F+fb・n+(m+mb・n)αa……………(14) BH45 7.5
Y
但し(MPL+m・αa・Z), (MYL+m・αa・X)は値がマイナスの場合0とする
iii)減速運動時(P 呼び番号 上級(H) 精密級(P)
ad)
iii)減速運動時(PTd) BG15 0.8 1.8
Z
Pad=μ・W+F+fb・n+(m+mb・n)αd ……………(15) BG20 2.3 4.9
PTd=EP(MPL+m・αd・Z)+EY(MYL+m・αd・X)+ER・MRL ………………(10) W+m
本図のW+mと異なる方向からも荷重を受け BG26 5.4 9.8
但し(MPL+m・αd・Z), (MYL+m・αd・X)は値がマイナスの場合0とする る場合はNBまでお問い合わせください。
B.1.b. 垂直移動の場合 BG33 4.4 10.2
PTC:等速運動時ブロック1個にかかる計算荷重(N) PTa:加速運動時ブロック1個にかかる計算荷重(N) i)等速運動時(Pac) BG46 7.4 13.3
PTd:減速運動時ブロック1個にかかる計算荷重(N) n:BG・BHのブロック数 W:負荷荷重(N) m:積載質量(kg)
αa:加速時の加速度(m/sec2) αd:減速時の加速度(m/sec2)(符号はマイナスとなります。) BG55 9 16
X:BG・BH中心から積載質量重心までの距離(mm) Y:BG・BH中心から積載質量重心までの距離(mm) Pac=(m+mb・n)g+F+fb・n ………………………(16)
Z:BG・BHボールねじ中心から積載質量重心までの距離(mm) EP:ピッチング方向のモーメント等価係数(表G-8参照) Pac:等速運動時の軸方向荷重定格荷重(N)
EY:ヨーイング方向のモーメント等価係数(表G-8参照) ER:ローリング方向のモーメント等価係数(表G-8参照) Paa:加速運動時の軸方向荷重定格荷重(N)
MPL:ピッチング方向の負荷モーメント(N・㎜) MPL=W・Z MYL:ヨーイング方向の負荷モーメント(N・㎜) MPL=W・X ii)加速運動時(Paa) Pad:減速運動時の軸方向荷重定格荷重(N)
MRL:ローリング方向の負荷モーメント(N・㎜) MRL=0(本使用方法の場合発生しません。) ※モーメントの方向は図G-8参照 μ:摩擦係数(0.006) W:ブロックにかかる荷重(N)
Paa=(m+mb・n)・(g+αa)+F+fb・n………………(17) F:軸方向にかかる外力(荷重)(N)
fb:ブロック単体の動摩擦抵抗(N)(表G-9参照)
A.1.d. 図G-7 n:BG・BHのブロック数 m:積載質量(kg)
以上より使用方法に合った計算式を用い、各動作の iii)減速運動時(Pad) mb:BG・BHのブロック質量(kg)(BG形P.G-16〜31参照,BH
平均荷重を計算しブロック1個にかかる計算荷重(PT)を 形P.G-88〜97参照)
αa:加速時の加速度(m/sec2)
求めます。 等速時の
速度(mm/sec) 移動量(S2) Pad=(m+mb・n)・(g+αd)+F+fb・n………………(18) αd:減速時の加速度(m/sec2)(符号はマイナスとなります。)
g:重力加速度(9.8m/sec2
3 加速時の )
PT= 1 (PTa3(S1+S2+S3) ・S1+PTC3・S2+PTd3・S3)……(11) 移動量(S1) 減速時の
移動量(S3) B.1.c.
PT:ブロック1個にかかる計算荷重(N) 以上より使用方法に合った計算式を用い、平均軸方向荷重(Pa)を求めます。
S1:加速時の移動量(mm)(図G-7参照)
S2:等速時の移動量(mm)(図G-7参照) 0
S3:減速時の移動量(mm)(図G-7参照) T1 T2 T3 時間(sec) 3
Pa= 1
(S1+S2+S3()│Paa│
3・S1+│Pac│3・S2+│Pad│3・S3)…(19)
PTa:加速運動時ブロック1個にかかる計算荷重(N)…式(3)(, 6)(, 9) T
PTC:等速運動時ブロック1個にかかる計算荷重(N)…式(2)(, 5)(, 8)
PTd:減速運動時ブロック1個にかかる計算荷重(N)…式(4)(, 7)(, 10) Pa:平均軸方向荷重(N)
S1:加速時の移動量(mm)(図G-7参照)
S2:等速時の移動量(mm)(図G-7参照)
S3:減速時の移動量(mm)(図G-7参照)
B. ボールねじ及びサポートベアリング部の寿命 Paa:加速運動時の軸方向荷重(N)…式(14)(, 17)
Pac:等速運動時の軸方向荷重(N)…式(13)(, 16)
ボールねじ及びサポートベアリング部の寿命計算は以下に示す通り共通の計算式となります。よって、ボールねじと Pad:減速運動時の軸方向荷重(N)…式(15)(, 18)
サポートベアリングの動定格荷重を比べ、より小さい値を入れて計算してください。
La=( 1 3
・Ca又はCbfW Pa )・ℓ …………………………(12)
La:寿命距離(km) fW:荷重係数(表G-7参照)
Ca:ボールねじ部の基本動定格荷重(N)
Cb:サポートベアリング部の基本動定格荷重(N) ア
P ク
a:軸方向荷重(N) ℓ:ボールねじリード(mm) チ
ュ
B.1. Paの計算 エ
ー
式(12)にて寿命を計算する際には、加速度を加味したPaの計算を行います。等速運動時、加速運動時、減速運動 タ
時の各軸方向荷重を算出し、その平均荷重をPaとします。
G-8 G-9
V
Page6
ACTUATOR
①BG形 ⑧カバーの有無、ローハウジング、ジャバラ
アクチュエータ BG形 ②サイズ 無記入:カバー無し(P.GH-16〜~)
③ボールねじリード(P.G-12仕様参照)
④ブロックタイプ
呼び番号の構成 A:ロングブロック1個付き
BG形の呼び番号は以下の様に表わします。
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩
BG 15 01 A - 75 H / A0 - BG 20 01 A - 100 H / A0 -
02 B 100 P A1 L K P△□ L:ローハウジング(P.GH-52〜~)
05 B 150 P A1 L S P△□
125 A2 C KN G▲ 200 A3 C K G▲
150 A3 J○○ LB A5 J○○ SN LB
175 A4 PNP A6 KN PNP
200 A5 B:ロングブロック2個付き
A8
A6 A9
A7 AA
R0 R0
C:カバー付き(P.GH-17〜~)
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩
BG 26 02 A - 150 H / A0 - BG 33 05 A - 150 H / A0 - C:ショートブロック1個付き
05 B 200 P A1 L S P△□ 10 B 200 P A1 L S P△□
250 A3 C K G▲ 20 C 300 A2 C H G▲
300 A5 J○○ SN LB J○○:ジャバラ付き(P.GH-54〜~)
D 400 A3 J○○ K LB
A6 KN PNP 500 A5 SN PNP
A8 600 A6 HN
A9 A7 KN
AA A8
R0 B1
B2
R0 D:ショートブロック2個付き
RA□
RB□ J の○○部にはセンサーケーブル引出し位置記号が入ります。
RC□ (P.G-54 参照)
※BG3320にはショートブロックはありません。
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩
BG 46 10 A - 340 H / A0 - BG 55 20 A - 980 H / A0 -
20 B 440 P A1 L S P△□ B 1080 P A1 L S P△□ ※ブロック 2 個付きの場合、駆動するブロックはモーターブラケッ ⑨センサ (P.G-63〜参照)
C 540 A2 C H G▲ ト側のブロックになります。
1180 A2 C H G▲ 無記入 センサ無し
D 640 A3 J○○ K LB 1280 A3 J○○ K LB ⑤ガイドレール長さ S 小型、スリム型フォトマイクロセンサ付き
740 A4 SN PNP 1380 A4 SN PNP ※精密級(P)にはガイドレール長さに制限があります。
840 B0 HN 詳しくは P.G-14 精度を参照してください。 H 密着型フォトマイクロセンサ付き ア
A5 HN K 近接センサ付き
940 C0 KN R0 KN ⑥.精度等級(P.G-14参照) ク
チ
1040 D0 SN S仕様センサのみ無し
H 上級 ュ
1140 D1 HN H仕様センサのみ無し エ
P 精密級 KN K仕様センサのみ無し ー
1240 R0
RA□ ⑦モータ取付部形状(P.G-32〜35参照) タ
SN、HN、KN はセンサーレールとセンサードグが取付けて出荷と
RB□ RA、RB、RC の□部には取付方向番号が入ります。(P.G-50、51参照) なりセンサのみ無しとなります。
RC□
⑩オプション 複数のオプションが必要な場合は各オプション記号の間に+を付けて併記してく
無記入 オプション無し ださい。(例:PS + LB + PNP)
※1:△部にはS,W又はRが入ります。(P.G-75)参照
ブロックのタイプや精度等級により選択できないガイドレール長さがあります。 P△□ 位置決めピン用穴(※1) □部にはRが入ります。(P.G-75)参照
詳しくはP.G-13、14を参照ください。 G▲ 特殊グリースオプション(※2) ※2:▲部にはU,LA,Fのいずれかが入ります。(P.G-80)参照
LB 低温黒色クロム処理(※3) ガイド部、ボールねじ部、アンギュラベアリング部に封入されます。
※3:アルミ製部品、回転ベアリング部を除く鋼製部品に処理されます。BG15形
PNP センサPNP出力仕様 の駆動側スライドブロックのみ黒色クロムめっき処理となります。
G-10 G-11
Page7
ACTUATOR
仕 様 許容速度と限界ストローク
BG形は上級(H)と精密級(P)から選定できます。 BG形の許容速度はモータの種類・使用条件によって異なりますが、ボールねじの危険速度によって制限されること
精密級(P)はガイドレール長さに制限があります。(P.G-14参照) があります。高速での使用や、長いガイドレールを使用される場合には注意をお願いします。
表G-10 仕様 表G-11 許容速度と限界ストローク
呼び番号 BG1501 BG1502 BG2001 BG2005 BG2602 BG2605 BG3305 BG3310 BG3320 BG4610 BG4620 BG5520 限界ストローク(mm) 許容速度(mm/sec)
呼び番号 レール長さ ロングブロック1個 ロングブロック2個 ショートブロック1個 ショートブロック2個 リード1 リード2
精度等級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 75 30 - - -
ラジアル方向すきま μm -2〜0 -4〜-2 -2〜0 -4〜-2 -3〜0 -6〜-3 -3〜0 -6〜-3 -4〜0 -8〜-4 -4〜0 -8〜-4 -3〜0 -7〜-3 -3〜0 -7〜-3 -3〜0 -7〜-3 -5〜0 -11〜-5 -5〜0 -11〜-5 -6〜0 -18〜-6 100 55 - - -
BG15 125 80 46 - -
基本動定格荷重 C kN 2.42 4.27 7.87 12.6 29.8 43.2 150 105 71 - - 185 370
175 130 96 - -
基本静定格荷重 CO kN 4.76 7.89 14.98 22.7 51.2 74.0 200 155 121 - -
ロ
ン MP N・m 17 35 99 181 610 1,088 限界ストローク(mm) 許容速度(mm/sec)
グ M2P N・m 92 199 550 1,035 3,285 5,465 呼び番号 レール長さ ロングブロック1個 ロングブロック2個 ショートブロック1個 ショートブロック2個 リード1 リード5
ブ 100 43 - - -
ロ静的許容 MY N・m 20 42 118 215 727 1,297 BG20 150 93 51 - - 187 925
ッ
クモーメント M2Y N・m 110 237 656 1,233 3,914 6,513 200 143 101 - -
ガ MR N・m 51 101 255 500 1,612 2,701 限界ストローク(mm) 許容速度(mm/sec)
呼び番号 レール長さ ロングブロック1個 ロングブロック2個 ショートブロック1個 ショートブロック2個 リード2 リード5
イ
ド M2R N・m 102 201 509 1,000 3,224 5,402 150 73 - - -
部 基本動定格荷重 C kN - - - 7.8 - 19.9 - BG26 200 123 61 - -
250 173 111 - - 281 694
基本静定格荷重 CO kN - - - 11.4 - 28.8 - 300 223 161 - -
シ
ョ MP N・m - - - 49 - 207 - 限界ストローク(mm) 許容速度(mm/sec)
ー 呼び番号 レール長さ ロングブロック1個 ロングブロック2個 ショートブロック1個 ショートブロック2個 リード5 リード10 リード20
ト M2P N・m - - - 368 - 1,336 - 150 60 - 85 34
ブ
ロ静的許容 MY N・m - - - 59 - 246 - 200 110 - 135 84
BG33 300 210 133 235 184 550 1,100
ッモーメント M2Y N・m - - - 439 - 1,593 - 400 310 233 335 284 1,500
ク 500 410 333 435 384 460 930
MR N・m - - - 250 - 907 - 600 510 433 535 484 310 620
M2R N・m - - - 500 - 1,814 - リード20はショートブロックタイプには対応していません。
軸径 mm 6 6 8 10 12 15 20 限界ストローク(mm) 許容速度(mm/sec)
ボ 呼び番号 レール長さ ロングブロック1個 ロングブロック2個 ショートブロック1個 ショートブロック2個 リード10 リード20
ーリード mm 1 2 1 5 2 5 5 10 20 10 20 20 340 209 100 245 172
ル
ねスペーサーボール比 - - - - - 1:1 - 1:1 - 1:1 - 1:1 - 2:1 - 2:1 440 309 200 345 272
540 409 300 445 372 740 1,480
じ基本動定格荷重 Ca kN 0.39 0.54 0.63 0.65 2.60 2.35 3.35 2.11 2.20 1.39 2.32 1.46 4.40 2.77 4.40 3.36 5.40 4.12 640 509 400 545 472
部
BG46 740 609 500 645 572 650 1,300
基本静定格荷重 Coa kN 0.77 0.75 1.34 0.92 3.64 3.30 5.90 2.95 3.50 1.75 4.05 2.02 7.90 3.95 7.90 5.27 10.5 7.00
840 709 600 745 672 500 1,000
サ
ベポ呼び番号 - AC4-12DF AC5-14DF AC6-16DF 70M8DF/GMP5 7001T2DF/GMP5 7002T2DF/GMP5 940 809 700 845 772 390 780
アー 1,040 909 800 945 872 315 630
リト
ン 基本動定格荷重 Cb kN 1.21 1.31 1.79 4.40 6.77 7.74 1,140 1,009 900 1,045 972 260 520
グ
部 基本静定格荷重 Cob kN 1.08 1.25 1.76 4.36 7.45 9.50 1,240 1,109 1,000 1,145 1,072 220 440
限界ストローク(mm) 許容速度(mm/sec)
・ BG15,BG20,BG26の精密級を小ストローク(BG1501:2mm以下、BG1502:4mm以下、BG2001:7mm以下、BG2005:25mm以下、 呼び番号 レール長さ ロングブロック1個 ロングブロック2個 ショートブロック1個 ショートブロック2個 リード20
BG2602:14mm以下、BG2605:25mm以下)、なおかつ高頻度の往復運動で使用する場合はあらかじめNBまでご相談ください。 980 834 711 - - 1,120
・ 静的許容モーメントのM2P,M2Y,M2Rはブロックを2個密着して使用した場合をあらわします。 1,080 934 811 - - 910
・ BG3320にはショートブロックタイプはありません。 BG55 1,180 1,034 911 - - 750
図G-8 モーメントの方向 1,280 1,134 1,011 - - 630
1,380 1,234 1,111 - - 530 ア
ク
MY M2Y 図G-9 ガイドレール長さと許容速度 チ
ュ
MR MP M2R M2P 1600 エ
BG3320 ー
1400 BG4620 タ
1200
1000 BG3310 BG5520
BG2005
800
BG2605 BG4610
600 BG3305
400 BG1502
BG2602
200 BG2001
BG1501
0
0 200 400 600 800 1000 1200 1400
ガイドレール長さmm
G-12 G-13
許容速度mm/sec
Page8
ACTUATOR
精 度
BG形の精度を表G-12に示します。 繰返し位置決め精度 図G-10 繰返し位置決め精度
表G-12 精度 任意の位置に同じ方向から位置決めを7回繰返して停 ℓ1
ガイド 繰返し位置決め精度 位置決め精度 走り平行度 B バックラッシュ ※起動トルク 止位置を測定し、読みの最大差の1/2を求める。この測
呼び番号 レール 上級 精密級 上級 精密級 上級 精密級 上級 精密級 上級 精密級 定を原則として、移動距離のほぼ中央および両端のそれ ℓ2
ぞれの位置で行い、求めた値のうち最大のものを測定値
mm μm μm μm μm μm μm μm μm N・m N・m とする。 ℓ3
75
100 繰返し位置決め精度=±12(ℓnの最大値)−(ℓnの最小値) ℓn
125
BG15 ±3 ±1 40 20 20 10 5 2 0.01 0.012
150
175
200
100 位置決め精度 図G-11 位置決め精度
一定の向きで適当な位置決めをし、これを基準位置と
BG20 150 ±3 ±1 50 20 25 10 5 2 0.01 0.012 +
する。次に同じ向きへ位置決めを行い、基準位置から実
200 際に移動した距離と移動すべき距離の差を測定する。こ
150 れをストロークのほぼ全域にわたって行い、基準位置か
200 ら実際に移動した距離と移動すべき距離の差のうち、最
BG26 ±3 ±1 50 20 25 10 5 2 0.015 0.04 大の値を測定値とする。 移動距離
250
300 位置決め精度=(Δℓn)max -
150
30 15
200 ±1
25 10
300 ±3 (±3) 2
BG33 35 20 5 0.07 0.15
400 (±5)
走り平行度B
500 40 25 15 走り平行度B 図G-12
35 ブロック中央にテストインジケータを固定し、ガイド
600 - 70 - - - - レールを取り付けボルトで定盤に固定し、その取付面上
340 にテストインジケータを当て、ブロックを移動距離のほぼ
35 20
440 0.15 全域にわたって動かしたときのテストインジケータの読
35 15 2
540 ±1 みの最大差を測定値とする。
40 25
640 (±3)
0.17
740 ±3 50 30 40 20
BG46 5 0.10
840 (±5)
940 80
1,040 - - 50 - - -
1,140 バックラッシュ 図G-13 バックラッシュ
100
1,240 ブロックに送りをかけて、わずかに動かしたときのテス Δℓ
トインジケータの読みを基準とし、その状態からブロック ア
980 を所定の荷重で同方向に移動させ、更にその荷重を抜 もどり ク
80 35 25 0.17 チ
1,080 ±1 2 いた時のテストインジケータの読みと基準値の差を測定 ュ
送りねじ送り 荷重変位
する。原則として、移動距離のほぼ中央およびほぼ両端 エ
BG55 1,180 ±3 40 50 30 5 0.20 ー
0.12
1,280 100 のそれぞれの位置でこの測定を行い、求めた値のうち最 タ
- - - - - 大のものを測定値とする。
1,380
測定は当社指定モータを取り付けた状態で行います。
※標準グリース使用時の値です。グリースの性状により値が変化する場合があります。 バックラッシュ=Δℓ
繰返し位置決め精度の( )内の値は折返し用プーリーユニット使用時に適用します。
G-14 G-15
実際に移動した距離
-指令した距離
Δℓ1
Δℓ2
Δℓ3
Δℓn
Page9
ACTUATOR
BG15 -カバー無し- BG2105A -カ, バBー付き-
A( ロングブロック1個付き) A( ロングブロック1個付き)
B( ロングブロック2個付き) B( ロングブロック2個付き)
L2
7 L1 42
M1×P1 N1 24.5
P1 33.9(最小)
6 33.9(最小) 6 7 2
32.9 32.9
23.7
10(溝深さ0.9)
4-M3深さ4
14 2×(M1+1)-φ3.4通し 14 4-M3深さ6
2-M2深さ3 2×2-M2深さ3(両面)
φ6ザグリ深さ2 23
(M3六角穴付低頭ボルトにて固定) A
6
A
B B
P2 30 6
A A
M2×P2 N2
2×(M1+1)-M2深さ2
(両面) 44
4-φ2.4 32
φ2(給脂穴) 29.2 29
19
30 25
断面A-A 矢視B(モータ取付部形状A0) 30
A0以外の形状はP.GH-36、37を参照してください 断面A-A 矢視B(モータ取付部形状A0)
A0以外の形状はP.GH-36、37を参照してください
イナーシャ(参考値) 単位:kg・m2 主要部材
呼び番号※3※4 限界ストローク 主要寸法mm ブロック質量㎏ ※2 全質量㎏ ガイド ロングブロック 名称 材質 備考
mm ※1 L1 L2 N1 M1×P1 N2 M2×P2 上面カバー無し 上面カバー付き 上面カバー無し 上面カバー付き
BG15□□ A- 75 30 75 124 12.5 1×50 12.5 1×50 0.03 0.05 0.21 0.24 呼び番号 レール 上面カバー無し 上面カバー付き ガイドレール ステンレス鋼 ア
全長 A B A B ボールねじ軸 鋼 ク
B - - - - - - - - - - - mm 1個付き 2個付き 1個付き 2個付き スライドブロック 鋼 チ
BG15□□ A- 100 55 100 149 25 1×50 25 1×50 0.03 0.05 0.25 0.28 75 1.06×10-7 - 1.07×10-7 - モーターブラケット アルミ 白アルマイト処理 ュ
B - - - - - - - - - - - 100 1.31×10-7 - 1.31×10-7 - ハウジング アルミ 白アルマイト処理 エ
BG15□□ A- 125 80
B 46 125 174 12.5 12.5 0.03 0.05 0.28 0.31 BG1501 125 1.56×10-7 1.56×10-7 1.56×10-7 1.58×10-7 ー
中間フランジ アルミ 白アルマイト処理 タ
150 1.80×10-7 1.81×10-7 1.81×10-7 1.82×10-7
BG15□□ A- 150 105 2×50 2×50 0.06 0.10 0.32 0.37 ダストカバー アルミ 白アルマイト処理
B 71 150 199 25 25 0.03 0.05 0.32 0.35 175 2.05×10-7 2.06×10-7 2.06×10-7 2.07×10-7 サブテーブル アルミ 白アルマイト処理
0.06 0.10 0.35 0.40 200 2.30×10-7 2.31×10-7 2.31×10-7 2.32×10-7 上面カバー アルミ 白アルマイト処理
BG15□□ A- 175 130 75 1.09×10-7 - 1.11×10-7 -
B 96 175 224 12.5 12.5 0.03 0.05 0.35 0.39
BG15□□ A- 200 155 3×50 3×50 0.06 0.10 0.39 0.44 100 1.33×10-7 - 1.35×10-7 - オプションで LB を選択すると鋼部品は低温黒色クロム処理となります。
BG1502 125 1.58×10-7 1.62×10-7 1.60×10-7 1.66×10-7 スライドブロックのみ黒色クロムめっき処理となります。
121 200 249 25 25 0.03 0.05 0.39 0.42
B 0.06 0.10 0.42 0.48 150 1.83×10-7 1.86×10-7 1.85×10-7 1.90×10-7
※1:限界ストロークはダンパ間のブロックの移動距離となります。 175 2.08×10-7 2.11×10-7 2.10×10-7 2.15×10-7
※2:ブロック質量の上面カバー付きは、サブテーブルの質量を含みます。 200 2.33×10-7 2.36×10-7 2.35×10-7 2.40×10-7
※3:Bタイプ(ブロック2個付き)の場合、駆動するブロックはモーターブラケット側になります。
※4:□部には、ボールねじリードが入ります。
G-16 G-17
22
15
3.5
11.5
12
9.5
2.5 14
5.5 8
22
φ3h6
φ17
φ20+0.05 0
25
12
3.5
11.5
22.8
3
38
Page10
ACTUATOR
BG20 -カバー無し- BG20A -カ, バBー付き-
A( ロングブロック1個付き) A( ロングブロック1個付き)
B( ロングブロック2個付き) B( ロングブロック2個付き)
L2
8 L1 49
M1×P1 N1 26
6 P1 10.5 8 41.8(最小)
41.8(最小) 10 40.2
40.2
4-M3深さ4.5
5 2×(M1+1)-φ3.4通し
4-M2深さ4 10(溝深さ0.9)φ6.5ザグリ深さ3 20
4-M4深さ14
20 33
29
A A 2×2-M2深さ5(両面) 6
B
B
A P2
M A
2×P2 N2 33 8
2×(M2+1)-M2.5深さ5(両面) 52
4-M3深さ6 4-φ3.4 37
39.6 P.C.D.29 120゚ 34
23
40 32.4
断面A-A 矢視B(モータ取付部形状A0) 40
A0以外の形状はP.GH-38、39を参照してください 断面A-A 矢視B(モータ取付部形状A0)
A0以外の形状はP.GH-38、39を参照してください
イナーシャ(参考値) 単位:kg・m2 主要部材
呼び番号※3※4 限界ストローク 主要寸法mm ブロック質量㎏ ※2 全質量㎏ ガイド ロングブロック 名称 材質 備考
mm ※1 L1 L2 N1 M1×P1 N2 M2×P2 上面カバー無し 上面カバー付き 上面カバー無し 上面カバー付き
BG20□□ A- 100 呼び番号 レール 上面カバー無し 上面カバー付き ガイドレール ステンレス鋼 ア
43 100 157 20 1×60 20 1×60 0.07 0.11 0.45 0.50 全長 A B A B ボールねじ軸 鋼 ク
B - - - - - - - - - - - mm 1個付き 2個付き 1個付き 2個付き スライドブロック 鋼 チ
BG20□□ A- 150 93
51 150 207 15 15 0.07 0.11 0.58 0.63 100 1.34×10-7 - 1.35×10-7 - ュ
B
143 2×60 2×60 0.14 0.22 0.65 0.74 BG2001 150 1.83×10-7 1.85×10-7 1.84×10-7 1.87×10-7 モーターブラケット:A0 アルミ
ダイキャスト 焼付アクリル塗装:銀白色 エ
BG20□□ A- 200
101 200 257 40 40 0.07 0.11 0.71 0.77 200 2.33×10-7 2.35×10-7 2.34×10-7 2.37×10-7 モーターブラケット:R0 アルミ 白アルマイト処理 ー
タ
B 0.14 0.22 0.78 0.88 100 1.76×10-7 - 2.00×10-7 - ハウジング アルミ 白アルマイト処理
※1:限界ストロークはダンパ間のブロックの移動距離となります。 BG2005 150 2.26×10-7 2.70×10-7 2.50×10-7 3.18×10-7 中間フランジ アルミ 白アルマイト処理
※2:ブロック質量の上面カバー付きは、サブテーブルの質量を含みます。 200 2.76×10-7 3.20×10-7 3.00×10-7 3.68×10-7 ダストカバー アルミ 白アルマイト処理
※3:Bタイプ(ブロック2個付き)の場合、駆動するブロックはモーターブラケット側になります。 サブテーブル アルミ 白アルマイト処理
※4:□部には、ボールねじリードが入ります。 上面カバー アルミ 白アルマイト処理
オプションで LB を選択すると鋼部品は低温黒色クロム処理となります。
G-18 G-19
29
20
4.5
17
18
12.5
3 18
4 9.5
29
φ4h6
φ20+0.05 0
32
14
4.5
17
30
8.5
45
Page11
ACTUATOR
BG26 -カバー無し- BG206A -カ, バBー付き-
A( ロングブロック1個付き) A( ロングブロック1個付き)
B( ロングブロック2個付き) B( ロングブロック2個付き)
L2
10 L1 52
M1×P1 N1 30.5
6 P1 11 10 10
61.8(最小) 61.8(最小)
60
60
4-M4深さ7 8.5 2×(M1+1)-φ4.5通し
15(溝深さ0.9) 30
4-M2深さ4 φ8ザグリ深さ4.5 4-M4深さ17 44
30
A 44 2×2-M2深さ5(両面)
A 8.5
B
B
A P2 34 8
M2×P2 N2 A
2×(M2+1)-M2.5深さ5(両面)4-M3深さ6 62
49.6 P.C.D.33 90゚ 47
31 43
50 42
4-φ3.4 50
断面A-A 矢視B(モータ取付部形状A0) 断面A-A 矢視B(モータ取付部形状A0)
A0以外の形状はP.GH-40、41を参照してください A0以外の形状はP.GH-40、41を参照してください
イナーシャ(参考値) 単位:kg・m2 主要部材
呼び番号※3※4 限界ストローク 主要寸法mm ブロック質量㎏ ※2 全質量㎏ ガイド ロングブロック 名称 材質 備考
mm ※1 L1 L2 N1 M1×P1 N2 M2×P2 上面カバー無し 上面カバー付き 上面カバー無し 上面カバー付き
BG26□□ A- 150 呼び番号 レール 上面カバー無し 上面カバー付き ガイドレール ステンレス鋼 ア
73 150 212 35 1×80 35 1×80 0.17 0.24 0.93 1.07 全長 A B A B ボールねじ軸 鋼 ク
B - - - - - - - - - - - mm 1個付き 2個付き 1個付き 2個付き スライドブロック 鋼 チ
BG26□□ A- 200 123 150 6.08×10-7 - 6.16×10-7 - ュ
61 200 262 20 20 0.17 0.24 1.14 1.3 モーターブラケット:A0 アルミ
ダイキャスト 焼付アクリル塗装:銀白色
B
173 2×80 2×80 0.34 0.48 1.31 1.54 7.65×10-7 7.83×10-7 7.73×10-7 エ
BG2602 200 7.97×10-7
ー
BG26□□ A- 250
111 250 312 45 45 0.17 0.24 1.36 1.53 250 9.22×10-7 9.39×10-7 9.29×10-7 9.54×10-7 モーターブラケット:R0 アルミ 白アルマイト処理 タ
B 0.34 0.48 1.53 1.78 300 1.08×10-6 1.10×10-6 1.09×10-6 1.11×10-6 ハウジング アルミ 白アルマイト処理
BG26□□ A- 300 223
161 300 362 30 3×80 30 3×80 0.17 0.24 1.57 1.76 150 6.99×10-7 - 7.44×10-7 - 中間フランジ アルミ 白アルマイト処理
B 0.34 0.48 1.74 2.01 BG2605 200 8.56×10-7 9.63×10-7 9.01×10-7 1.05×10-6 ダストカバー アルミ 白アルマイト処理
※1:限界ストロークはダンパ間のブロックの移動距離となります。 250 1.01×10-6 1.12×10-6 1.06×10-6 1.21×10-6 サブテーブル アルミ 白アルマイト処理
※2:ブロック質量の上面カバー付きは、サブテーブルの質量を含みます。 300 1.17×10-6 1.28×10-6 1.21×10-6 1.37×10-6 上面カバー アルミ 白アルマイト処理
※3:Bタイプ(ブロック2個付き)の場合、駆動するブロックはモーターブラケット側になります。 オプションで LB を選択すると鋼部品は低温黒色クロム処理となります。
※4:□部には、ボールねじリードが入ります。
G-20 G-21
37
26
6
22
25
16
4 25
3.8 13.5
37
φ5h6
φ24+0.05 0
40
17
6
22
38
12
55
Page12
ACTUATOR
BG33 -カバー無し- BG33 -カバー付き-
A( ロングブロック1個付き) A( ロングブロック1個付き)
B( ロングブロック2個付き) B( ロングブロック2個付き)
L2
8 L1 59
M1×P1 N1 34
6 77.2(最小) P1 9 9 77.2(最小)
77.2 10 77.2
74.4 74.4
8
4-M5深さ8 4-M5深さ15 8
15(溝深さ1) 2×(M1+1)-φ5.5通し 30 4-M3深さ6
4-M2深さ5 30 φ9.5ザグリ深さ5 54 (裏面より)
53.8 A 8 2×2-M2深さ5(両面)
A
B B
A A
P2
M2×P2 N2
2×(M2+1)-M2.5深さ6(両面) 4-M3深さ8 86
90° P.C.D.37 62
59 4-M4深さ8 60° 59
37.4 P.C.D.40
60
60 2-M4深さ8 50
断面 A-A 矢視B(モータ取付部形状 A0) 断面 A-A 矢視B(モータ取付部形状 A0)
A0以外の形状はP.GH-42、43を参照してください A0以外の形状はP.GH-42、43を参照してください
イナーシャ(参考値) 単位:kg・m2 主要部材
呼び番号※3※4 限界ストローク 主要寸法mm ブロック質量㎏ ※2 全質量㎏ ガイド ロングブロック 名称 材質 備考
mm ※1 L1 L2 N1 M1×P1 N2 M2×P2 上面カバー無し 上面カバー付き 上面カバー無し 上面カバー付き
BG33□□ A- 150 60 150 217 25 1×100 25 1×100 0.3 0.4 1.6 呼び番号 レール 上面カバー無し 上面カバー付き
全長 A B A B ガイドレール 鋼 黒染め、
1.8 研削加工部を除く
B - - - - - - - - - - - mm 1個付き 2個付き 1個付き 2個付き ボールねじ軸 鋼
BG33□□ A- 200 110 200 267 50 1×100 50 1×100 0.3 0.4 2 2.1 150 1.64×10-6 - 1.71×10-6 - スライドブロック 鋼
B - - - - - - - - - - - 200 2.02×10-6 - 2.09×10-6 - モーターブラケット:A0 アルミ
ダイキャスト 焼付アクリル塗装:銀白色 ア
BG33□□ A- 300 210
B 133 300 367 2×100 2×100 0.3 0.4 2.6 2.8
0.6 0.8 2.9 3.2 BG3305 300 2.79×10-6 2.99×10-6 2.86×10-6 3.13×10-6 ク
400 3.55×10-6 3.75×10-6 3.62×10-6 3.89×10-6 モーターブラケット:R0 アルミ 白アルマイト処理 チ
BG33□□ A- 400 310 500 4.32×10-6 4.52×10-6 4.39×10-6 4.66×10-6 ュ
B 233 400 467 3×100 3×100 0.3 0.4 3.2 3.5 ハウジング アルミ
410 50 50 0.6 0.8 3.6 3.9 600 5.08×10-6 5.28×10-6 5.15×10-6 5.42×10-6 ダイキャスト 焼付アクリル塗装:銀白色 エ
ローハウジング アルミ 白アルマイト処理
BG33□□ A- 500 150 2.19×10-6 - 2.47×10-6 - ー
タ
B 333 500 567 4×100 4×100 0.3 0.4 3.9 4.2 中間フランジ 鋼 黒染め
0.6 0.8 4.2 4.6 200 2.57×10-6 - 2.85×10-6 - ダストカバー アルミ 白アルマイト処理
BG33□□ A- 600 510
433 600 667 5×100 5×100 0.3 0.4 4.6 4.9 3.34×10-6
BG3310 300 4.14×10-6 3.61×10-6 4.69×10-6
400 4.10×10-6 4.90×10-6 サブテーブル アルミ 白アルマイト処理
B 0.6 0.8 4.9 5.3 4.38×10-6 5.46×10-6
上面カバー アルミ 白アルマイト処理
※1:限界ストロークはダンパ間のブロックの移動距離となります。 500 4.87×10-6 5.67×10-6 5.15×10-6 6.22×10-6
600 5.63×10-6 6.43×10-6 5.91×10-6 6.99×10-6 オプションで LB を選択すると鋼部品は低温黒色クロム処理となります。
※2:ブロック質量の上面カバー付きは、サブテーブルの質量を含みます。
※3:Bタイプ(ブロック2個付き)の場合、駆動するブロックはモーターブラケット側になります。 150 5.94×10-6 - 7.06×10-6 -
※4:□部には、ボールねじリードが入ります。 200 6.74×10-6 - 7.85×10-6 -
8.33×10-6
BG3320 300 1.15×10-5 9.44×10-6 1.38×10-5
400 9.91×10-6 1.31×10-5 1.10×10-5 1.53×10-5
500 1.15×10-5 1.47×10-5 1.26×10-5 1.69×10-5
600 1.31×10-5 1.63×10-5 1.42×10-5 1.85×10-5
G-22 G-23
44.5
33
8
31.5
30
23
18
30
6
44.5
φ6h6
φ28H8
48
15
8
31.5
46.5 7 74
66
Page13
ACTUATOR
BG33 -カバー無し- BG33 -カバー付き-
C( ショートブロック1個付き) C( ショートブロック1個付き)
D( ショートブロック2個付き) D( ショートブロック2個付き)
L2
8 L1 59
M1×P1 N1 34
6 51.9(最小) P1 9 9 51.9(最小)
51.9 10 51.9
49.1 49.1
5 2.5
2-M5深さ8 10(溝深さ1) 5 2.5
2×(M1+1)-φ5.5通し 2-M5深さ15 〃 〃 4-M2深さ5
〃 〃 4-M2深さ5 φ9.5ザグリ深さ5 28.5 (裏面より)
28.5 A 5 2.5 2×2-M2深さ5(両面)
A
B B
A P2 A
M2×P2 N2
2×(M2+1)-M2.5深さ6(両面) 4-M3深さ8
90° P.C.D.37 86
59 4-M4深さ8 60° 62
59
37.4 P.C.D.40
60 2-M4深さ8 50 60
断面 A-A 矢視B(モータ取付部形状 A0) 断面 A-A 矢視B(モータ取付部形状 A0)
A0以外の形状はP.GH-42、43を参照してください A0以外の形状はP.GH-42、43を参照してください
イナーシャ(参考値) 単位:kg・m2 主要部材
呼び番号※3※4 限界ストローク 主要寸法mm ブロック質量㎏ ※2 全質量㎏ ガイド ショートブロック 名称 材質 備考
mm ※1 L1 L2 N1 M1×P1 N2 M2×P2 上面カバー無し 上面カバー付き 上面カバー無し 上面カバー付き ル 上面カバー無し 上面カバー付き
BG33□□ C- 150 85 5 0.2 1.5 1.6 呼び番号 レー
全長 C D C D ガイドレール 鋼 黒染め、
研削加工部を除く ア
D 34 150 217 25 25 0.1
mm 1個付き 2個付き 1個付き 2個付き ク
ボールねじ軸 鋼 チ
BG33□□ C- 200 135 1×100 1×100 0.3 0.4 1.7 1.9
0.15 0.2 150 1.56×10-6 1.64×10-6 1.60×10-6 1.71×10-6 スライドブロック 鋼 ュ
D 84 200 267 1.8 2
0.3 0.4 2 2.2 200 1.94×10-6 2.03×10-6 1.98×10-6 2.10×10-6
モーターブラケット:A0 アルミ エ
BG33□□ C-300 235 2.6 ダイキャスト 焼付アクリル塗装:銀白色
184 300 367 2×100 2×100 0.15 0.2 2.5
0.3 0.4 2.7 2.9 BG3305 300 2.71×10-6 2.79×10-6 2.75×10-6 2.86×10-6 ー
D 400 3.48×10-6 3.56×10-6 3.51×10-6 3.63×10-6 モーターブラケット:R0 アルミ 白アルマイト処理 タ
BG33□□ C- 400 335 500 4.24×10-6 4.32×10-6 4.28×10-6 4.39×10-6 ハウジング アルミ
D 284 400 467 50 3×100 50 3×100 0.15 0.2 3.1 3.3
0.3 0.4 3.3 3.5 600 5.01×10-6 5.09×10-6 5.04×10-6 5.16×10-6 ダイキャスト 焼付アクリル塗装:銀白色
ローハウジング アルミ 白アルマイト処理
BG33□□ C- 500 435 150 1.88×10-6 2.21×10-6 2.02×10-6 2.49×10-6
中間フランジ 鋼 黒染め
D 384 500 567 4×100 4×100 0.15 0.2 3.8 4
0.3 0.4 3.9 4.2 200 2.27×10-6 2.59×10-6 2.40×10-6 2.87×10-6
ダストカバー アルミ 白アルマイト処理
BG33□□ C- 600 535 4.7 サブテーブル アルミ 白アルマイト処理
484 600 667 5×100 5×100 0.15 0.2 4.4
0.3 0.4 4.6 4.9 BG3310 300 3.03×10-6 3.36×10-6 3.17×10-6 3.64×10-6
D 400 3.80×10-6 4.12×10-6 3.94×10-6 4.40×10-6
上面カバー アルミ 白アルマイト処理
※1:限界ストロークはダンパ間のブロックの移動距離となります。 500 4.56×10-6 4.89×10-6 4.70×10-6 5.17×10-6
600 5.33×10-6 5.65×10-6 5.47×10-6 5.93×10-6 オプションで LB を選択すると鋼部品は低温黒色クロム処理となります。
※2:ブロック質量の上面カバー付きは、サブテーブルの質量を含みます。
※3:Dタイプ(ブロック2個付き)の場合、駆動するブロックはモーターブラケット側になります。
※4:□部には、ボールねじリードが入ります。
※5:C・Dタイプ(ショートブロック)には、リード20mmはありません。
G-24 G-25
44.5
33
8
31.5
30
23
18
30
6
44.5
φ6h6
φ28H8
48
15
8
31.5 74
46.5
7
66
Page14
ACTUATOR
BG46 -カバー無し- BG2406A -カ, バBー付き-
A( ロングブロック1個付き) A( ロングブロック1個付き)
B( ロングブロック2個付き) B( ロングブロック2個付き)
L2
13 L1 85.5
M1×P1 N1 51 12.5
9 109.2(最小) P1 15 18 3.5
109.2 109.2(最小)
106.6 109.2
106.6
4-M6深さ12 8
15(溝深さ1) 2×(M1+1)-φ6.6通し
4-M6深さ22 8 4-M3深さ6
4-M2深さ5 φ11ザグリ深さ6.5 4-M5深さ22 30 (裏面より)
46 46
A 80 81
A
B
B
A P2
A
M2×P2 N2
2×(M2+1)-M2.5深さ6(両面)
85 8-M4深さ8 90 112
88
54.4 P.C.D.60 85
86 60 86
断面 A-A 矢視B(モータ取付部形状 A0) 断面 A-A 矢視B(モータ取付部形状 A0)
A0以外の形状はP.GH-44、45を参照してください イナーシャ(参考値) 単位:kg・m2 A0以外の形状はP.GH-44、45を参照してください
呼び番号※3※4 限界ストローク 主要寸法mm ブロック質量㎏ ※2 全質量㎏ ガイド ロングブロック
mm ※1 L1 L2 N1 M1×P1 N2 M2×P2 上面カバー無し 上面カバー付き 上面カバー無し 上面カバー付き
BG46□□ A- 340 呼び番号 レール 上面カバー無し 上面カバー付き
209
100 340 438.5 2×100 3×100 0.9 1.2 6.5 7 全長 A B A B 主要部材
B 1.8 2.4 7.5 8 mm 1個付き 2個付き 1個付き 2個付き 名称 材質 備考
BG46□□ A- 440 309
200 440 538.5 3×100 4×100 0.9 1.2 8 8.5 340 1.79×10-5 2.02×10-5 1.87×10-5 2.17×10-5
B 9.5 ガイドレール 鋼 黒染め、
1.8 2.4 8.5 440 2.18×10-5 2.41×10-5 2.25×10-5 2.56×10-5 研削加工部を除く
BG46□□ A- 540 409
300 540 638.5 4×100 5×100 0.9 1.2 9 10 540 2.57×10-5 2.79×10-5 2.64×10-5 2.95×10-5 ボールねじ軸 鋼
B 1.8 2.4 10 11 640 2.95×10-5 3.18×10-5 3.03×10-5 3.33×10-5 スライドブロック 鋼
BG46□□ A- 640 509 BG4610 740 3.34×10-5 3.57×10-5 3.42×10-5 3.72×10-5
400 640 738.5 5×100 6×100 0.9 1.2 10.5 11 モーターブラケット:A0 アルミ
12.5 ダイキャスト 焼付アクリル塗装:銀白色
B 1.8 2.4 11.5 840 3.73×10-5 3.96×10-5 3.80×10-5 4.11×10-5 ア
ク
BG46□□ A- 740 609 940 4.12×10-5 4.35×10-5 4.19×10-5 4.50×10-5
500 740 838.5 6×100 7×100 0.9 1.2 12 12.5 モーターブラケット:B0 アルミ
ダイキャスト 焼付アクリル塗装:銀白色 チ
B 70 20 1.8 2.4 13 14 1,040 4.50×10-5 4.74×10-5 4.58×10-5 4.88×10-5 ュ
BG46□□ A- 840 709 1,140 4.89×10-5 5.12×10-5 4.97×10-5 5.27×10-5
600 840 938.5 7×100 8×100 0.9 1.2 13 14 モーターブラケット:C0 アルミ
ダイキャスト 焼付アクリル塗装:銀白色 エ
B 1.8 2.4 14 15.5 1,240 5.28×10-5 5.51×10-5 5.35×10-5 5.66×10-5 モーターブラケット:D0 アルミ ー
BG46□□ A- 940 15.5 ダイキャスト 焼付アクリル塗装:銀白色
809
700 940 1,038.5 8×100 9×100 0.9 1.2 14.5 340 2.47×10-5 3.39×10-5 2.78×10-5 3.99×10-5 タ
B 1.8 2.4 15.5 16.5 440 2.86×10-5 3.77×10-5 3.17×10-5 4.38×10-5 モーターブラケット:R0 アルミ 白アルマイト処理
BG46□□ A- 1040 909
800 1,040 1,138.5 9×100 10×100 0.9 1.2 16 17 540 3.25×10-5 4.16×10-5 3.55×10-5 4.77×10-5 ハウジング アルミ
ダイキャスト 焼付アクリル塗装:銀白色
B 1.8 2.4 17 18 640 3.63×10-5 4.55×10-5 3.94×10-5 5.16×10-5
ローハウジング アルミ 白アルマイト処理
BG46□□ A- 1140 1,009
900 1,140 1,238.5 10×100 11×100 0.9 1.2 17.5 18.5 BG4620 740 4.03×10-5 4.94×10-5 4.33×10-5 5.55×10-5
中間フランジ 鋼 黒染め
B 1.8 2.4 18 19.5 840 4.41×10-5 5.34×10-5 4.71×10-5 5.93×10-5
ダストカバー アルミ 白アルマイト処理
BG46□□ A- 1240 1,109
1,000 1,240 1,338.5 11×100 12×100 0.9 1.2 18.5 19.5 940 4.80×10-5 5.72×10-5 5.09×10-5 6.32×10-5
サブテーブル アルミ 白アルマイト処理
B 1.8 2.4 19.5 21 1,040 5.19×10-5 6.11×10-5 5.48×10-5 6.71×10-5
上面カバー アルミ 白アルマイト処理
※1:限界ストロークはダンパ間のブロックの移動距離となります。 1,140 5.57×10-5 6.50×10-5 5.87×10-5 7.09×10-5
オプションで LB を選択すると鋼部品は低温黒色クロム処理となります。
※2:ブロック質量の上面カバー付きは、サブテーブルの質量を含みます。 1,240 5.96×10-5 6.89×10-5 6.26×10-5 7.48×10-5
※3:Bタイプ(ブロック2個付き)の場合、駆動するブロックはモーターブラケット側になります。
※4:□部には、ボールねじリードが入ります。
G-26 G-27
63.5
46
11
44.5
46
32
46
。 。
7.5
63.5
φ8h6
φ46
φ50H8
68
22
11
44.5 100
66
93
Page15
ACTUATOR
BG46 -カバー無し- BG46 -カバー付き-
C( ショートブロック1個付き) C( ショートブロック1個付き)
D( ショートブロック2個付き) D( ショートブロック2個付き)
L2
13 L1 85.5
M1×P1 N1 51 12.5
9 73.2(最小) P1 15 18 3.5 73.2(最小)
73.2 73.2
70.6 70.6
2-M6深さ12 4-M2深さ5
8 3.5 2×(M1+1)-φ6.6通し 8 3.5 4-M3深さ6
15(溝深さ1) φ11ザグリ深さ6.5 2-M6深さ22 〃 〃 (裏面より)
43.5
〃 〃
A 44 A
B
B
A P2 A
M2×P2 N2
2×(M2+1)-M2.5深さ6(両面)
112
85 8-M4深さ8 90 88
54.4 P.C.D.60 85
86 60 86
断面 A-A 矢視B(モータ取付部形状 A0) 断面 A-A 矢視B(モータ取付部形状 A0)
A0以外の形状はP.GH-44、45を参照してください A0以外の形状はP.GH-44、45を参照してください
イナーシャ(参考値) 単位:kg・m2
呼び番号※3※4 限界ストローク 主要寸法mm ブロック質量㎏ ※2 全質量㎏ ガイド ショートブロック
mm ※1 L1 L2 N1 M1×P1 N2 M2×P2 上面カバー無し 上面カバー付き 上面カバー無し 上面カバー付き
BG46□□ C- 340 呼び番号 レール 上面カバー無し 上面カバー付き
245
172 340 438.5 2×100 3×100 0.5 0.7 6 6.5 全長 C D C D 主要部材
D 1 1.4 6.5 7 mm 1個付き 2個付き 1個付き 2個付き 名称 材質 備考
BG46□□ C- 440 345
272 440 538.5 3×100 4×100 0.5 0.7 7.5 8 340 1.69×10-5 1.82×10-5 1.74×10-5 1.92×10-5
8.5 ガイドレール 鋼 黒染め、
D 1 1.4 8 440 2.08×10-5 2.20×10-5 2.13×10-5 2.31×10-5 研削加工部を除く
BG46□□ C- 540 445
372 540 638.5 4×100 5×100 0.5 0.7 8.5 9.5 540 2.46×10-5 2.59×10-5 2.52×10-5 2.69×10-5 ボールねじ軸 鋼
D 1 1.4 9.5 10 640 2.85×10-5 2.98×10-5 2.90×10-5 3.08×10-5 スライドブロック 鋼
BG46□□ C- 640 545 BG4610 740 3.24×10-5 3.37×10-5 3.29×10-5 3.47×10-5
472 640 738.5 5×100 6×100 0.5 0.7 10 10.5 モーターブラケット:A0 アルミ
11.5 ダイキャスト 焼付アクリル塗装:銀白色
D 1 1.4 10.5 840 3.63×10-5 3.75×10-5 3.67×10-5 3.83×10-5 ア
ク
BG46□□ C- 740 645 940 4.02×10-5 4.14×10-5 4.06×10-5 4.22×10-5
572 740 838.5 6×100 7×100 0.5 0.7 11.5 12 モーターブラケット:B0 アルミ
ダイキャスト 焼付アクリル塗装:銀白色 チ
D 70 20 1 1.4 12 13 1,040 4.41×10-5 4.53×10-5 4.44×10-5 4.61×10-5 ュ
BG46□□ C- 840 745 1,140 4.79×10-5 4.92×10-5 4.83×10-5 4.99×10-5
672 840 938.5 7×100 8×100 0.5 0.7 13 13.5 モーターブラケット:C0 アルミ
ダイキャスト 焼付アクリル塗装:銀白色 エ
D 1 1.4 13.5 14 1,240 5.18×10-5 5.30×10-5 5.22×10-5 5.38×10-5 モーターブラケット:D0 アルミ ー
BG46□□ C- 940 15 ダイキャスト 焼付アクリル塗装:銀白色
845
772 940 1,038.5 8×100 9×100 0.5 0.7 14 340 2.07×10-5 2.58×10-5 2.27×10-5 2.98×10-5 タ
D 1 1.4 14.5 15.5 440 2.46×10-5 2.96×10-5 2.66×10-5 3.37×10-5 モーターブラケット:R0 アルミ 白アルマイト処理
BG46□□ C- 1040 945
872 1,040 1,138.5 9×100 10×100 0.5 0.7 15.5 16.5 540 2.84×10-5 3.35×10-5 3.05×10-5 3.76×10-5 ハウジング アルミ
ダイキャスト 焼付アクリル塗装:銀白色
D 1 1.4 16 17 640 3.23×10-5 3.74×10-5 3.44×10-5 4.14×10-5
ローハウジング アルミ 白アルマイト処理
BG46□□ C- 1140 1,045
972 1,140 1,238.5 10×100 11×100 0.5 0.7 17 18 BG4620 740 3.62×10-5 4.13×10-5 3.82×10-5 4.53×10-5
中間フランジ 鋼 黒染め
D 1 1.4 17.5 18.5 840 4.02×10-5 4.51×10-5 4.17×10-5 4.82×10-5
ダストカバー アルミ 白アルマイト処理
BG46□□ C-1 240 1,145
D 1,072 1,240 1,338.5 11×100 12×100 0.5 0.7 18.5 19 940 4.41×10-5 4.90×10-5 4.56×10-5 5.21×10-5
サブテーブル アルミ 白アルマイト処理
1 1.4 19 20 1,040 4.80×10-5 5.29×10-5 4.95×10-5 5.59×10-5
上面カバー アルミ 白アルマイト処理
※1:限界ストロークはダンパ間のブロックの移動距離となります。 1,140 5.18×10-5 5.68×10-5 5.34×10-5 5.98×10-5
オプションで LB を選択すると鋼部品は低温黒色クロム処理となります。
※2:ブロック質量の上面カバー付きは、サブテーブルの質量を含みます。 1,240 5.57×10-5 6.06×10-5 5.72×10-5 6.37×10-5
※3:Dタイプ(ブロック2個付き)の場合、駆動するブロックはモーターブラケット側になります。
※4:□部には、ボールねじリードが入ります。
G-28 G-29
63.5
46
11
44.5
46
32
46
。 。
7.5
63.5
φ8h6
φ46
φ50H8
68
22
11
44.5
66 100
93
Page16
ACTUATOR
BG55 -カバー無し- BG2505A -カ, バBー付き-
A( ロングブロック1個付き) A( ロングブロック1個付き)
B( ロングブロック2個付き) B( ロングブロック2個付き)
L2
15 L1 94
M1×P1 N1 59
123(最小)
9 123(最小) P1 22
123 16 17 123
121 121
8
4-M8深さ15 8 4-M8深さ36
20(溝深さ1.5) 2×(M1+1)-φ9通し 50 4-M3深さ6(裏面より)
4-M3深さ6 φ14ザグリ深さ8.6 95
50
A 95 A
B B
A
A P2
M2×P2 N2
2×(M2+1)-M3深さ6
(両面) 124
99 4-M5深さ10 90 95
65 P.C.D.70 92
100
100
断面 A-A 矢視B(モータ取付部形状 A0) 断面 A-A 矢視B(モータ取付部形状 A0)
A0以外の形状はP.GH-46、47を参照してください A0以外の形状はP.GH-46、47を参照してください
イナーシャ(参考値) 単位:kg・m2 主要部材
呼び番号※3※4 限界ストローク 主要寸法mm ブロック質量㎏ ※2 全質量㎏ ガイド ロングブロック 名称 材質 備考
mm ※1 L1 L2 N1 M1×P1 N2 M2×P2 上面カバー無し 上面カバー付き 上面カバー無し 上面カバー付き
BG55□□ A- 980 呼び番号 レール 上面カバー無し 上面カバー付き
ガイドレール 鋼 黒染め、 ア
834
711 980 1,089 40 6×150 90 4×200 1.7 2.3 20 21 全長 A B A B 研削加工部を除く ク
B 3.4 4.6 22 24 mm 1個付き 2個付き 1個付き 2個付き ボールねじ軸 鋼 チ
BG55□□ A- 1080 934
811 1,080 1,189 15 40 1.7 2.3 22 23 980 1.46×10-4 1.64×10-4 1.52×10-4 1.76×10-4 スライドブロック 鋼 ュ
B 5×200 3.4 4.6 24 26 1,080 1.59×10-4 1.76×10-4 1.65×10-4 1.88×10-4
1,034 7×150 モーターブラケット アルミ 白アルマイト処理 エ
BG55□□ A- 1180
911 1,180 1,289 65 90 1.7 2.3 23 25 BG5520 1,180 1.71×10-4 1.88×10-4 1.77×10-4 2.00×10-4 ー
ハウジング アルミ 白アルマイト処理 タ
B 3.4 4.6 25 27 1,280 1.83×10-4 2.00×10-4 1.89×10-4 2.12×10-4 中間フランジ 鋼 黒染め
BG55□□ A- 1280 1,134 1,380 1.95×10-4 2.13×10-4 2.01×10-4 2.25×10-4
1,011 1,280 1,389 40 8×150 40 1.7 2.3 25 27 ダストカバー アルミ 白アルマイト処理
B 6×200 3.4 4.6 27 29 サブテーブル アルミ 白アルマイト処理
BG55□□ A- 1380 1,234
1,111 1,380 1,489 15 9×150 90 1.7 2.3 27 29 上面カバー アルミ 白アルマイト処理
B 3.4 4.6 29 31 オプションで LB を選択すると鋼部品は低温黒色クロム処理となります。
※1:限界ストロークはダンパ間のブロックの移動距離となります。
※2:ブロック質量の上面カバー付きは、サブテーブルの質量を含みます。
※3:B(ブロック2個付き)の場合、駆動するブロックはモーターブラケット側になります。
※4:□部には、ボールねじリードが入ります。
G-30 G-31
74.5
55
13
42
50
32
50
。 10
63.5
74.5
φ12h6
φ50H8
80
36
13
42
77 110
106
Page17
ACTUATOR
モータ取付部形状と適用モータ
BG形は各種モータが取り付けられるように、モーターブラケットと中間フランジを用意してあります。
表G-13(1) 適用モータ 表G-13(2) 適用モータ
BG15 BG20 BG26 BG33 BG46 BG55 BG15 BG20 BG26 BG33 BG46 BG55
モータ形式 出力 P.G-36 P.G-38 P.G-40 P.G-42 P.G-44 P.G-46 モータ形式 出力 P.G-36 P.G-38 P.G-40 P.G-42 P.G-44 P.G-46
〜37 〜39 〜41 〜43 〜45 〜47 〜37 〜39 〜41 〜43 〜45 〜47
MUMA5A 50W Q1AA04003D 30W
- AA AA B2 -
MUMA01 100W Q1AA04005D 50W - A1 A1 A1 B0 -
E -
MUMA02 200W A7 Q1AA04010D 100W
- - - A2 Q
MUMA04 400W - Q1AA06020D 200W A6
- - - A1 A0
パ MSME5A 50W 山 Q1AA06040D
- A3 A3 A2 C0 - 洋 400W -
ナ MSME01 100W 電 Q1AA07075D 750W - - - - A4 A1
ソ A5 MSME02 200W A7 気 R2AA04005
- - - A2 - ㈱ 50W
ニ - A1 A1 A1 B0 -
ッ MSME04 400W - R2AA04010 100W
ク MSME08 750W - - - - A3 A2 R R2AA06020 200W A6
㈱ - - - A1 A0
MSMF5A 50W R2AA06040 400W -
- A3 A3 A2 C0 -
MSMF01 100W R2AA08075 750W - - - - A4 A1
A6 MSMF02 200W A7 R88M-G05030 50W
- - - A2 - - A1 A1 A1 B0 -
MSMF04 400W - R88M-G10030 100W
MSMF08 750W - - - - A3 A2 G R88M-G20030 200W A7
- - - A2 -
HF-KP(MP)053 50W R88M-G40030 400W -
- A1 A1 A1 B0 -
HF-KP(MP)13 100W R88M-G75030 750W - - - - A3 A2
J3 HF-KP(MP)23 200W A6 オ R88M-K05030
- - - A1 A0 ム 50W
- A1 A1 A1 B0 -
HF-KP(MP)43 400W - A
C ロ R88M-K10030 100W
HF-KP(MP)73 750W - - - - A4 A1 サ ン
㈱ G5 R88M-K20030 200W A7
-
A 三 - - - A2
HG-AK0136 10W ー
ボ R88M-K40030
C 菱 400W -
サ 電 HG-AK0236 20W A2 A9 A9 - - - モ R88M-K75030 750W - - - - A3 A2
ー 機 HG-AK0336 30W ー R88M-1M10030 -
ボ ㈱ 100W - A1 A1 A1 B0
タ
HG-KR(MR)053 50W R88M-1M20030 200W A7
モ J4 - A1 A1 A1 B0 - 1S - - - A2 -
ー HG-KR(MR)13 100W R88M-1M40030 400W -
タ HG-KR(MR)23 200W A6 R88M-1M75030 750W - - - - A3 A2
- - - A1 A0
HG-KR(MR)43 400W - MV-M005 50W
- A1 A1 A1 B0 -
HG-KR(MR)73 750W - - - - A4 A1 MV-M010 100W
SGMMV-A1 10W MV MV-M020 200W A6
∑-Ⅴ - - - A1 A0
mini SGMMV-A2 20W A2 A9 A9 - - - キ MV-M040 400W -
ー
SGMMV-A3 30W エ MV-M075 750W - - - - A4 A1
SGMJV(SGMAV)-A5 50W ン
ス SV(SV2)-M005 50W
- A1 A1 A1 B0 -
SGMJV(SGMAV)-01 100W - A1 A1 A1 B0 - ㈱ SV(SV2)-M010 100W
SGMAV-C2 150W SV SV(SV2)-M020 200W A6
- - - A1 A0
∑-Ⅴ SGMJV(SGMAV)-02 200W A6 SV(SV2)-M040 400W - ア
安 ク
川 SGMJV(SGMAV)-04 400W - - - A1 A0 SV(SV2)-M075 750W - - - - A4 A1
- チ
電 SGMAV-06 550W βis0.2/5000 50W ュ
機 - A1 A1 A1 B0 - エ
㈱ SGMJV(SGMAV)-08 750W - - - - A4 A1 フ
ァ βis0.3/5000 100W ー
タ
SGM7J(SGM7A)-A5 50W ナ
ッ βis βis0.4/5000 ※ 130W A6
ク
SGM7J(SGM7A)-01 100W - A1 A1 A1 B0 - ㈱ βis0.5/6000 ※ 350W - - - - A1 A0
SGM7J(SGM7A)-C2 150W βis1/6000 500W -
∑-7 SGM7J(SGM7A)-02 200W A6 ※モータ軸長さが短くなるためカップリングについては別途お問い合わせください
SGM7J(SGM7A)-04 400W - - - A1 A0 上記以外のモータにも対応いたします。詳しくは NB までお問い合わせください。
-
SGM7J(SGM7A)-06 600W
SGM7J(SGM7A)-08 750W - - - - A4 A1
G-32 G-33
Page18
ACTUATOR
モータ取付部形状と適用モータ
表G-14(1) 適用モータ 表G-14(2) 適用モータ
BG15 BG20 BG26 BG33 BG46 BG55 BG15 BG20 BG26 BG33 BG46 BG55
モータ形式 フランジ角 P.G-36 P.G-38 P.G-40 P.G-42 P.G-44 P.G-46 モータ形式 フランジ角 P.G-36 P.G-38 P.G-40 P.G-42 P.G-44 P.G-46
〜37 〜39 〜41 〜43 〜45 〜47 〜37 〜39 〜41 〜43 〜45 〜47
AR1 □20 A6 - - - - - TS3692 □20 A6 - - - - -
AR2 □28 A3 A6 A6 - - - ス
テ TS3641 □28 A3 A6 A6 - - -
2相
AR AR46 □42 - A5 A5 B1 - - ッ TS3617 □42 - A5 A5 B1 - -
AR6 □60 - - - A8 D0 - ピ TS3690 □56.4 - - - A5 - -
ン 多
α AR9 □85 - - - - D1 A4 グ 摩 TS3682 □20 A6 - - - - -
ステップ AZM1 □20 A6 - - - - - モ 川
AZM2 □28 A3 A6 A6 - - - ー 精 TS3667 □42 - A5 A5 B1 - -
5相
タ 機 TS3624 ※ □60 - - - A8 D0 -
AZ AZM4 □42 - A5 A5 B1 - - ㈱ TS3630 □86 - - - - D1 A5
AZM6 □60 - - - A8 D0 - TS3699N112 □28 A3 A6 A6 - - -
AZM9 □85 - - - - D1 A4 i-STEP TS3699N172 □42 - A5 A5 B1 - -
オ
リ RKS54 □42 - A5 A5 B1 - - ス TS3699N231(N232) □56.4 - - - A5 - -
エ RKⅡ RKS56 □60 - - - A8 D0 - テ TS3692 □20 A6 - - - - -
ン
タ RKS59 □85 - - - - D1 A4 ッ TS3641 □28 A3 A6 A6 - - -
ピ 三 Si servo
ル CRK51 □20 A5 - - - - - ン 明 TS3617 □42 - A5 A5 B1 - -
モ
ー CRK52 □28 A3 A6 A6 - - - グ 電 TS3653 □56.4 - - - A5 - -
CRK
タ CRK54 □42 - A5 A5 B1 - - サ 子
ー SM-L5MH □28 A3 A6 A6 - - -
産
ー 5相 CRK56 □60 - - - A8 D0 - ボ 業 SM-02MH/
ス ㈱ Si super SM-04MH □42 - A5 A5 B1 - -
テ PK51 □20 A5 - - - - - ㈱
ッ PKP52 □28 A3 A6 A6 - - - SM-09MH/
SM-12MH □56.4 - - - A5 - -
ピ CVK PKP54 □42 - A5 A5 B1 - -
ン
グ (PKP) PKP56 □56.4 - - - A5 - - ※:モータ軸長さが短くなるためカップリングについては別途お問合せ下さい。
モ PKP56□F □60 - - - A8 D0 -
ー
タ PK59 □85 - - - - D1 A4
PKP21 □20 A6 - - - - -
CVK PKP22 □28 A3 A6 A6 - - -
2相
(PKP) PKP24 □42 - A5 A5 B1 - -
PKP26 □56.4 - - - A5 - -
SH528 □28 A3 A6 A6 - - -
SM542 □42 - A5 A5 B1 - -
5相 F5
山 SM560 □60 - - - A8 D0 -
洋 SM586 □85 - - - - D1 A5
電
気 SH228 □28 A3 A6 A6 - - -
㈱ SH142,103H52 □42 - A5 A5 B1 - -
2相 F2 103H712 □56.4 - - - A5 - - ア
ク
103H782(コネクタタイプ) □60 - - - A8 D0 - チ
□K-S51□ □20 ュ
㈱ A6 - - - - - エ
テ
ク □K-S52□ □28 A4 - - - - - ー
ノ タ
ド 5相 □K-S54□ □42 - A5 A5 B1 - -
ラ
イ □K-S(M)56□ □60 - - - A8 D0 -
ブ □K-M(G)59□ □85 - - - - D1 A5
上記以外のモータにも対応いたします。詳しくは NB までお問い合わせください。
G-34 G-35
Page19
ACTUATOR
BG15
( )内は中間フランジの質量を示します。
A0 42 A4(質量:8g)
24.5 推奨カップリング:XBW-15C2(鍋屋バイテック)
7 2 LAD-15C(酒井製作所) 42 6 29.5 4-φ3通し
29.5 SFC-005DA2(三木プーリ) 1.5
19 φ5ザグリ深さ3
(裏面より)
10
4-φ2.4通し 25 2
A1(質量:9g) A5(質量:4g)
推奨カップリング:XBW-15C2(鍋屋バイテック) 42 6 29.5 推奨カップリング:XBW-15C2(鍋屋バイテック) 42 3
SFC-005DA2(三木プーリ) 1.5 90° 4-M2.5深さ6 1.5 29.5 4-φ2.4通し
P.C.D.33 16 φ4.2ザグリ深さ2.2
(裏面より)
3.5
A2(質量:8g) A6(質量:4g)
推奨カップリング:XBW-15C2(鍋屋バイテック) 42 6
29.5 推奨カップリング:XBW-15C2(鍋屋バイテック) 42 3
LAD-15C(酒井製作所) 1.5 4-φ3.5通し 1.5 29.5 4-φ2.4通し
90°
SFC-005DA2(三木プーリ) φ6.5ザグリ深さ3.5 φ4.2ザグリ深さ2.2
(裏面より) 16 (裏面より)
P.C.D.28
3.5
A3(質量:9g) 42 6 4-φ3通し A7(質量:11g)
推奨カップリング:XBW-15C2(鍋屋バイテック) 29.5
1.5 φ5ザグリ深さ3 推奨カップリング:XBW-15C2(鍋屋バイテック) 42 6 29.5
LAD-15C(酒井製作所) 23 (裏面より) LAD-15C(酒井製作所) 1.5
SFC-005DA2(三木プーリ) 90° 4-φ3通し
φ5ザグリ深さ3
(裏面より)
P.C.D.13.6
2.5 ア
ク
チ
ュ
モータと中間フランジを組立てた後、本体に取付けてください。 エ
ー
タ
G-36 G-37
4.5 3.5 4.5
φ3h6
φ17 φ17 φ17 φ17
φ22+0.05
0 φ20+0.05
0 φ20+0.05
0 φ20+0.05
0
22
5.5 8
23 26 28 9.5
28
2.5 1.5 1.5 2.5
φ11+0.05
0 φ15+0.05
0 φ16+0.05 φ17
0
φ18+0.05
0
24 16 16 19
22 22 24
Page20
ACTUATOR
BG20
( )内は中間フランジの質量を示します。
A0 49 A6(質量:10g)
26 120゚ 推奨カップリング: XBW-19C2(鍋屋バイテック) 49 5
4-M3深さ6
8 SFC-010DA2(三木プーリ) 1.5 39
39 P.C.D.29 4-φ3通し
23 φ5ザグリ深さ3
(裏面より)
4-φ3.4通し
32.4
40 2.5
A1(質量:38g) A8(質量:12g)
推奨カップリング:XBW-19C2(鍋屋バイテック) 49 12 90゚ 4-M4深さ12 推奨カップリング: XBW-19C2(鍋屋バイテック) 49 6 4-M2.5深さ6
90゚
SFC-010DA2(三木プーリ) 40 P.C.D.46 SFC-010DA2(三木プーリ) P.C.D.33
1.5
39
3.5
A3(質量:39g) A9(質量:14g)
49 12 90゚ 4-φ3.4通し
推奨カップリング: XBW-19C2(鍋屋バイテック) 4-M3深さ6 推奨カップリング: XBW-19C2(鍋屋バイテック) 49 6
1.5 90゚ φ6.5ザグリ深さ3.4
SFC-010DA2(三木プーリ) 40 P.C.D.45 SFC-010DA2(三木プーリ) 1.5 P.C.D.28
39 (裏面より)
3.5 3
A5(質量:26g) AA(質量:46g) 90゚ 4-M3深さ6
49 7 42
推奨カップリング: XBW-19C2(鍋屋バイテック) 4-φ3.4通し
1.5 推奨カップリング: XBW-19C2(鍋屋バイテック) 49 11 P.C.D.48
SFC-010DA2(三木プーリ) 31 φ6ザグリ深さ4 SFC-010DA2(三木プーリ) 1.5 42
(裏面より)
ア
2.5 ク
2.5 チ
ュ
A5, A6, A9, AA形状では、モータと中間フランジを組立てた後、本体に取付けてください。 エ
ー
タ
G-38 G-39
8.5 7.5 7.5
φ4h6
φ20+0.05
0
φ16 φ16 φ16
φ22+0.05
0 φ30+0.05
0 φ30
+0.05
0
29
4 9.5
31 40 40 12.5
42
8.5 1.5 1.5 2
φ16 φ20+0.05
0 φ16
φ16 φ20+0.05
0
φ22+0.05
0
φ22+0.05
0
28 28 23
42 29