


このカタログについて
| ドキュメント名 | KemroX - FlexCore Runtime Licenses |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 397.4Kb |
| 取り扱い企業 | KEBA Japan株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
KemroX
FlexCore
Runtime Licenses
Version 1.5
Page2
02 KEBA
KemroX
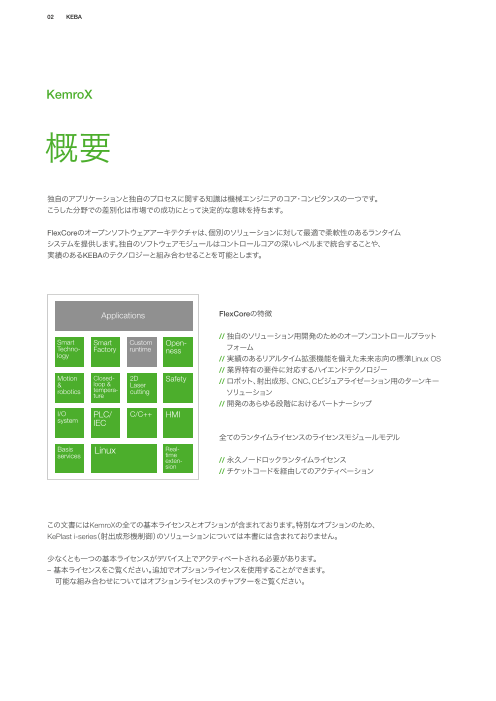
概要
独自のアプリケーションと独自のプロセスに関する知識は機械エンジニアのコア・コンピタンスの一つです。
こうした分野での差別化は市場での成功にとって決定的な意味を持ちます。
FlexCoreのオープンソフトウェアアーキテクチャは、個別のソリューションに対して最適で柔軟性のあるランタイム
システムを提供します。独自のソフトウェアモジュールはコントロールコアの深いレベルまで統合することや、
実績のあるKEBAのテクノロジーと組み合わせることを可能とします。
Applications FlexCoreの特徴
// 独自のソリューション用開発のためのオープンコントロールプラット
Smart Smart Custom Open-
Techno- Factory runtime ness フォーム
logy // 実績のあるリアルタイム拡張機能を備えた未来志向の標準Linux OS
// 業界特有の要件に対応するハイエンドテクノロジー
Motion Closed- 2D Safety
& loop & Laser // ロボット、射出成形、 CNC、Cビジュアライゼーション用のターンキー
robotics tempera- cutting
ture ソリューション
// 開発のあらゆる段階におけるパートナーシップ
I/O PLC/ C/C++ HMI
system IEC
全てのランタイムライセンスのライセンスモジュールモデル
Basis Linux Real-
services time
exten- // 永久ノードロックランタイムライセンス
sion
// チケットコードを経由してのアクティベーション
この文書にはKemroXの全ての基本ライセンスとオプションが含まれております。特別なオプションのため、
KePlast i-serie(s 射出成形機制御)のソリューションについては本書には含まれておりません。
少なくとも一つの基本ライセンスがデバイス上でアクティベートされる必要があります。
– 基本ライセンスをご覧ください。追加でオプションライセンスを使用することができます。
可能な組み合わせについてはオプションライセンスのチャプターをご覧ください。
Page3
KemroX Runtime Licenses 03
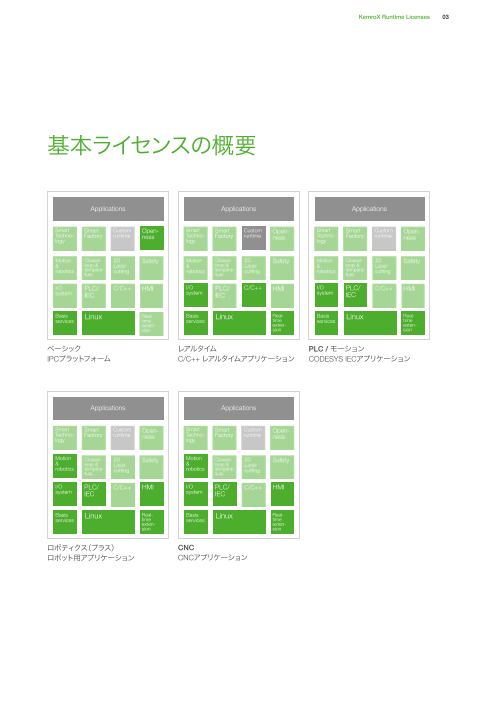
基本ライセンスの概要
Applications Applications Applications
Smart Smart Custom Open- Smart Smart Custom Open- Smart Smart Custom Open-
Techno- Factory runtime ness Techno- Factory runtime ness Techno- Factory runtime ness
logy logy logy
Motion Closed- 2D Safety Motion Closed- 2D Safety Motion Closed- 2D Safety
& loop & Laser & loop & Laser & loop & Laser
robotics tempera- cutting robotics tempera- cutting robotics tempera- cutting
ture ture ture
I/O PLC/ C/C++ HMI I/O PLC/ C/C++ HMI I/O PLC/ C/C++ HMI
system IEC system IEC system IEC
Basis Linux Real- Basis Linux Real- Basis Linux Real-
services time services time services time
exten- exten- exten-
sion sion sion
ベーシック レアルタイム PLC / モーション
IPCプラットフォーム C/C++ レアルタイムアプリケーション CODESYS IECアプリケーション
Applications Applications
Smart Smart Custom Open- Smart Smart Custom Open-
Techno- Factory runtime ness Techno- Factory runtime ness
logy logy
Motion Closed- 2D Safety Motion Closed- 2D Safety
& loop & Laser & loop & Laser
robotics tempera- cutting robotics tempera- cutting
ture ture
I/O PLC/ C/C++ HMI I/O PLC/ C/C++ HMI
system IEC system IEC
Basis Linux Real- Basis
time Linux Real-
services services time
exten- exten-
sion sion
ロボティクス(プラス) CNC
ロボット用アプリケーション CNCアプリケーション
Page4
04 KEBA
基本ライセンス
RL Basic
IPC プラットフォームに最適なランタイムライセンス
操作システム // Linu(x Debianベース)
// リアルタイムカーネルを含まない
// *Device Administration / Device Configによる設定とサービス
基本的なサービス // 7セグサービスディスプレイで直接操作できるMMIサービス
// ブート管理、*バックアップ/リストア用デバイスサービス
* オプション: 可能性はハードウェア、ソフトウェによって異なります
RL Realtime
KEBA I/O-systemシステムを使用するリアルタイム・アプリケーション用ランタイムライセンス
操作システム // Linu(x Debianベース)
// OSADL PREEMPT_RT リアルタイム Linuxカーネル
// *Device Administration / Device Configによる設定とサービス
基本的なサービス // 7セグサービスディスプレイで直接操作できるMMIサービス
// ブート管理、*バックアップ/リストア用デバイスサービス
* オプション: 可能性はハードウェア、ソフトウェによって異なります
// 様々なフィールドバスによるデータの送受信
I/O システム // サイクリック及び非サイクリックデータをサポート
// APIとシンボリック名によるI/Oエンドポイントへのアクセス
// C言語ランタイムシステム(タスク/例外管理)
C/C++ // POSIXへのダイレクトアクセス付C言語ランタイムシステム
// I/Oシステム、ベースサービス、ハードウェア等へアクセスするためのAPI
RL PLC
CODESYSプログラミングによるコントロールアプリ用ランタイムライセンス
操作システム // Linu(x Debianベース)
// OSADL PREEMPT_RTリアルタイム Linuxカーネル
// *Device Administration / Device Config による設定とサービス
基本的なサービス // 7セグサービスディスプレイで直接操作できるMMIサービス
// ブート管理、*バックアップ/リストア用デバイスサービス
* オプション: 可能性はハードウェア、ソフトウェによって異なります
// 様々なフィールドバスによるデータの送受信
I/O システム // サイクリック及び非サイクリックデータをサポート
// APIとシンボリック名によるI/Oエンドポイントへのアクセス
PLC // CODESYS 3.5に基づくIEC61131-3
Page5
KemroX Runtime Licenses 05
RL Motion
CODESYS プログラミングによるモーションアプリ用ランタイムライセンス
操作システム // Linu(x Debianベース)
// OSADL PREEMPT_RT リアルタイム Linuxカーネル
// *Device Administration / Device Configによる設定とサービス
基本的なサービス // 7セグサービスディスプレイで直接操作できるMMIサービス
// ブート管理、*バックアップ/リストア用デバイスサービス
* オプション: 可能性はハードウェア、ソフトウェによって異なります
// 様々なフィールドバスによるデータ送受信
I/O システム // サイクリック及び非サイクリックデータをサポート
// APIとシンボリック名によるI/Oエンドポイントへのアクセス
PLC // CODESYS 3.5に基づくIEC61131-3
// PLCopen Part 1によるファンクションブロック
モーション
// ベンダ固有のモーション・ファンクションブロックの追加
RL Robotics
カーテシアン、スカラ、パレタイジングロボット限定 ロボットアプリケーション用ランタイムライセンス
操作システム // Linu(x Debianベース)
// OSADL PREEMPT_RT リアルタイム Linuxカーネル
// *Device Administration / Device Configによる設定とサービス
基本的なサービス // 7セグサービスディスプレイで直接操作できるMMIサービス
// ブート管理、*バックアップ/リストア用デバイスサービス
* オプション: 可能性はハードウェア、ソフトウェによって異なります
// 様々なフィールドバスによるデータ送受信
I/O システム // サイクリック及び非サイクリックデータをサポート
// APIとシンボリック名によるI/Oエンドポイントへのアクセス
PLC // CODESYS 3.5に基づくIEC61131-3
// PLCopen Part 1によるファンクションブロック
モーション
// ベンダ固有のモーション・ファンクションブロックの追加
// ロボットコントロール用IEC インタフェース
// KAIROロボット用プログラミング言語
// 軌道予測
// 軸の速度と加速度に対する軌道整合リミッター
// 同期PTP動作
// 直線、円軌道動作
ロボティクス
// 絶対軌道ブレンディング
// 相対軌道ブレンディング
// 重ね合わせ軌道ブレンディング
// トリガーポイント
// HMIロボット“TeachView“
// 直交、スカラ、パレタイジングロボット限定
RL KeViewトレンド KeView トレンドランタイムライセンス
Page6
06 KEBA
RL Robotics Plus
全てのキネマティックタイプ式ロボットアプリケーション用ランタイムライセンス
操作システム // Linu(x Debianベース)
// OSADL PREEMPT_RTリアルタイム Linuxカーネル
// *Device Administration / Device Configによる設定とサービス
基本的なサービス // 7セグサービスディスプレイで直接操作できるMMIサービス
// ブート管理、*バックアップ/リストア用デバイスサービス
* オプション: 可能性はハードウェア、ソフトウェによって異なります
// 様々なフィールドバスによるデータ送受信
I/O システム // サイクリック及び非サイクリックデータをサポート
// APIとシンボリック名によるI/Oエンドポイントへのアクセス
PLC // CODESYS 3.5に基づくIEC61131-3
// PLCopen Part 1によるファンクションブロック
モーション
// ベンダ固有のモーション・ファンクションブロックの追加
// ロボットコントロール用IEC インタフェース
// KAIROロボット用プログラミング言語
// 軌道予測
// 軸の速度と加速度に対する軌道整合リミッター
// 同期PTP動作
// 直線、円軌道動作
ロボティクス
// 絶対軌道ブレンディング
// 相対軌道ブレンディング
// 重ね合わせ軌道ブレンディング
// トリガーポイント
// HMIロボット“TeachView“
// 直交、スカラ、パレタイジングロボット限定
RL KeViewトレンド KeView トレンドランタイムライセンス
RL PLC
Runtime license for CNC applications for all kinematic types
操作システム // Linu(x Debianベース)
// OSADL PREEMPT_RTリアルタイム Linuxカーネル
// *Device Administration / Device Configによる設定とサービス
基本的なサービス // 7セグサービスディスプレイで直接操作できるMMIサービス
// ブート管理、*バックアップ/リストア用デバイスサービス
* オプション: 可能性はハードウェア、ソフトウェによって異なります
// 様々なフィールドバスによるデータ送受信
I/O システム // サイクリック及び非サイクリックデータをサポート
// APIとシンボリック名によるI/Oエンドポイントへのアクセス
PLC // CODESYS 3.5に基づくIEC61131-3
// PLCopen Part 1によるファンクションブロック
モーション
// ベンダ固有のモーション・ファンクションブロックの追加
最大4補間軸のCNCカーネル
// 1 チャンネル
CNC // 8 軸/スピンドル
// 1 同期タスク
// 輸出承認不要
Page7
KemroX Runtime Licenses 07
付属ランタイムライセンス (オプション)
このライセンスは追加ライセンスとして使用できます (基本ライセンスは必要です)
- このライセンスには追加できません
o オプションで追加可能です
x 基本的なライセンスは含まれております
_ オプションの略称:1行目, 2行目 (例. RLo Multi Cycle Array) は”Ma”と表示しています
C/C++
C/C++
C言語ランタイムシステム
// タスク/例外管理を備えたC ランタイムシステム
// POSIXに直接アクセスできるカスタマーCランタイム
システム
RLo C/C++ - x o o o o o
// I/Oシステム、基本サービス、ハードウェアにアクセスする
ためのAPI
// IECからC ファンクションへ(IECランタイムシステムが
可能な場合)
ビジュアル
ビジュアル
RL KeView Trend KeView Trend ランタイムライセンス o* o o o x x -
RL KeView Style KeView Style ランタイムライセンス o* o o o - - -
KeView Style RT-用ランタイムライセンスウィジェット
RLo KeView RT-Widgets - o o o - - -
// KeTop AP5xx series のみ
可動テクノロジー
可動テクノロジー
サードパーティ製ドライブ統合用インタフェース
RLo Custom Drives - - - o o o -
// カスタムドライブの定義によるレベル1-3
基本 基本 基本
リアルタイム リアルタイム リアルタイム
PLC PLC PLC
モーション モーション モーション
ロボット ロボット ロボット
ロボットプラス ロボットプラス ロボットプラス
CNC CNC CNC
Page8
08 KEBA
ロボティクステクノロジー
C/C++
協働、コラボレーション用機能
// 作業/ブロックエリア
// 作業エリアの速度低減
RLo Collaboration Robotics - - - - o o -
// 自由に定義できるモニタリングポイント
// ハンドガイド
// 衝突検知
テクノロジーパッケージアーク溶接
// 作業/ブロックエリア
// ロボットHMIの溶接に特化した拡張機能
// 設定可能な溶接パターンによるロボット動作の
RLo Welding Robotics - - - - o o -
重ね合わせ
// 自動ワーク位置補正
// 多層溶接
// レーザー追跡溶接シーム修正
テクノロジーパッケージパッキング:
// コンベアトラッキング
// インフィード/マルチ/インデックスベルト
RLo Packaging Robotics // インテリジェントモーション - - - - o o -
// 高度なマルチグリッパー
// 作業/ブロックエリア
ロボットの精度を向上させる機能:
// ダイナミックトルクモデル
// 軸トルクの一貫した制限
RLo Accuracy Improvements
// ダイナミックモデルのツール識別 - - - - o o -
Robotics
// ダイナミックモデルのオンラインドライブ識別
// ロボットキャリブレーション
// 弾性補償
RLo Additional Kinematic マルチロボットアプリケーションの拡張
- - - - o o -
Robotics // 追加ロボット1台につき1ライセンス
カスタムキネマティックトランスフォーメーションの統合用
インタフェース
// ロボットトランスフォーメーション
// ギヤトランスフォーメーション
RLo Custom Kinematic
// ダイナミックロボットモデル - - - - o o -
Robotics WindowsデスクトップとLinuxリアルタイム環境の開発
環境とそれぞれのテストスイートが付属しています
基本
リアルタイム
PLC
モーション
ロボット
ロボットプラス
CNC
Page9
KemroX Runtime Licenses 09
CNC テクノロジー
CNCテクノロジー
輸出対象ファームウェアの拡張
RLo DualUse CNC - - - - - - o
// 4軸以上の補間軸が使用可能
テクノロジー・パッケージ レーザー2D
RLo Laser-2D CNC // Laser-Lib,スプラインス ,軸結合 , NDC, PWM, POD, - - - - - - o
LPC, 自動リトレース,FPS, frog jump, fly cut
CNC用アプリケーションプログラミングインタフェース
(API)
RLo AFL CNC - - - - - - o
// CNCへのコマンド及びインタフェースとしてのAFL API
の使用
軸数の拡張
RLo Additional Axis CNC - - - - - - o
// 8 つの追加軸/スピンドル
チャンネル数の拡張
RLo Additional Channel CNC - - - - - - o
// 1 つの追加チャンネル(最大8チャンネル)
テクノロジー・パッケージ・エロディング (EDM)
// 電極補正, 冷却コントロール, オービタルムーブメント
RLo Eroding Package CNC スクラブ, ラディウスをコントロールした軌道ムーブ - - - - - - o
メント, コーンサイクル, フラッシュムーブメント
キネマティック変換を含む拡張
RLo Kinematic CNC // 回転/ティルティングテーブルキネマティック - - - - - - o
// 円筒面補間
I/O システム
I/O システム
EtherCAT入力をオーバーサンプリングし、EtherCAT
出力をサイクル毎に複数の値で書き込むことが可能
KeStudioで“マルチサイクルアレイ”が有効な場合、
以下のEtherCATデバイスを使用可能
// C5デバイス: DI570, DM5xx, DO5xx, MM540,
RLo Multi Cycle Array AI57x, AM57x, AO57x, IM581, IM582, MI550 - o o o o o o
// Kemro X のD3 ドライブ
// その他のEtherCATデバイス: EtherCATデバイスが
サポートする最小サイクルタイムによる
サイクルタイムの絶対最小値: 62,5 us
基本 基本
リアルタイム リアルタイム
PLC PLC
モーション モーション
ロボット ロボット
ロボットプラス ロボットプラス
CNC CNC
Page10
010 KEBA
クローズドループ と 温度テクノロジー
クローズドループ と 温度テクノロジー
// KEBA Fast reaction機能を経由したクローズドループ
RLo Fast Reaction Control コントロール - o o o o o o
// KeControl C5、KeDrive D3で使用可能( CP053を除く)
クローズドループ温度制御ライブラリ
// プラスチック成形機に適応
RLo Temperature Control // オープン、クローズド温度制御クローズドループ自動
- - o o o o o
Plast チューニング
// J, K, L, N, PT100 サーモ・エレメントダイナミック
チェンジを含む
スマートテクノロジー
Smart technology
drag&bot OS用ランタイムライセンス
// ロボットアプリケーションの3Dシミュレーション、設定、
操作、視覚化のための直感的なHTML5 GUI
// オープンソースソフトウェアロボットオペレーティング
システムにともづく実行環境(ROS)
RLo dragandbot OS* - - o o o o -
ハードウェアサポート
// KeControlC5またはD3との組み合わせは性能クラス20
またはCFastメモリー40GBのみ
ロボットそれぞれにライセンスあり
コンディションモニタリングライブラリ
// ドライブトレインの振動エネルギーの
ドライブベース検出
// 外部振動センサー用信号処理ブロック:
RLo ConditionMonitoring a_RMS (有効振動加速度), - - o o o o o
v_RMS (実行振動速度),
衝突検知, ローリング軸受モニタリング不均衡計算
// RLoマルチサイクルアレイ、RLoスマートリンクを含む
* 実際には完全に統合していないため、セールスにお問合せください
基本 基本
リアルタイム リアルタイム
PLC PLC
モーション モーション
ロボット ロボット
ロボットプラス ロボットプラス
CNC CNC
Page11
KemroX Runtime Licenses 011
スマートファクトリー
スマートテクノロジー
RLo Modbus TCP Modbus TCP Client/Server 用ランタイムライセンス - - o o o o o
変数(読み書き)にリモートアクセスするための
HTTP/REST APIランタイムライセンス
// デバイス・サービス・コマンド
// 診断データ
RLo Smart Link o o o o o o o
// システムレポート
// バックアップ/リストア
// ロボティクス
// サイクルデータ用ウェブソケット
OPC UA サーバー
// セキュリティ証明書との接続
// ユーザ管理
RLo OPC UA Server o o o o o o o
// データアクセス付デバイスからのジェネリック
変数ツリー
// 1クライアントとの接続
OPC UA サーバープラス
// セキュリティ証明書との接続
RLo OPC UA Server Plus // ユーザ管理 o o o o o o o
// 最大5クライアントのデータアクセス付デバイスから
ジェネリック変数ツリーへ接続可能
OPC UA サーバーアドバンス
// セキュリティ証明書との接続
// ユーザ管理
// データアクセス付デバイスからのジェネリック
RLo OPC UA Server Adv 変数ツリー o o o o o o o
// データアクセスのためのXmlファイルによる顧客定義
情報モデル
// マルチクライアント接続
OPC UA サーバープロフェッショナル
// セキュリティ証明書との接続
// ユーザ管理
// データアクセス付デバイスからのジェネリック
変数ツリー
// データアクセスのためのXmlファイルによる顧客定義
情報モデル
//メソッド、イベント、プラグインを備えた顧客定義の
RLo OPC UA Server Pro 情報モデル o o o o o o o
// イベントヒストリカライズ
// マルチクライアントコ接続
メソッドとイベントを使用するプラグインでユーザ定義の情
報モデルを使用するためには、「Unified Automation」の追
加ライセンス「Ansi-C OPC-UA Server SDK binary」が
必要です。このライセンスについては「Umfied Automation」
に直接ご注文ください
基本
リアルタイム
PLC
モーション
ロボット
ロボットプラス
CNC
Page12
012 KEBA
オープン性
Openness
柔軟な拡張性を実現するランタイムライセンス
// MMIサービス用プラグイン
RLo Openness (ディスプレイ, デバイスのキー) x o o o o o o
// デバイス管理者用プラグイン (HTML5 ベース)
// 特定のソフトウェアユニットのカスタマイズ
安全機能
安全機能 (DU3x5用)
安全機能ロジック
// AND, OR, XOR, timer, RS-Flip-Flopなど
通常安全要素を使用
// 有効化ボタン
// 非常停止
// ドアロック
// 両手操作ボタン
// リミットスイッチ
RL Safe PLC
// ライトカーテン - - o o o o -
// 運転モード選択スイッチ
// センサー
アウトプット要素
// セーフデジタルアウトプット
KeSafeシステムコンポーネントへの安全なインタフェース
// FSoE-Master über EtherCAT
単軸モニタリングの安全機能
// SOS 安全運転停止
// SDI 安全な方向
// SLS 安全制限速度
// SLI 安全に制限されたインクリメント
// SSx 安全停止 1/2
安全機能ロジック
// AND, OR, XOR, timer, RS-Flip-Flop など
通常安全要素を使用します
// 有効化ボタン
// 非常停止
RL Safe Motion Rel - - - o o o -
// ドアロック
// 両手操作ボタン
// リミットスイッチ
// ライトカーテン
// 運転モード選択スイッチ
// センサー
アウトプット要素
// セーフデジタルアウトプット
KeSafeシステムコンポーネントへの安全なインタフェース
// FSoE-Master über EtherCAT
// SW Type:ランタイム
基本 基本
リアルタイム リアルタイム
PLC PLC
モーション モーション
ロボット ロボット
ロボットプラス ロボットプラス
CNC CNC
Page13
KemroX Runtime Licenses 013
安全機能
安全機能 (DU3x5用)
単軸モニタリングの安全機能
// SLP 安全制限ポジション
// SEL 安全緊急制限
// SCA 安全カム
// SRX 安全リファレンス
// SOS 安全制御停止
// SDI 安全方向
// SLS 安全速度制限
// SLI安全制限インクリメント
// SSx 安全停止 1/2
安全機能ロジック
// AND, OR, XOR, timer, RS-Flip-Flopなど
RL Safe Motion Abs 通常安全要素を使用 - - - o o o -
// イネーブルボタン
// 非常停止
// ドアロック
// 両手操作ボタン
// リミットスイッチ
// ライトカーテン
// 運転モード選択スイッチ
// センサー
アウトプット要素
// セーフデジタルアウトプット
KeSafeシステムコンポーネントへの安全なインタフェース
// FSoE-Master über EtherCAT
基本
リアルタイム
PLC
モーション
ロボット
ロボットプラス
CNC
Page14
014 KEBA
安全機能
安全機能 (DU3x5用)
ロボット用安全機能
// SRTc 安全な直交ロボット移動
// SLSc 安全に制限された直交速度
単軸モニタリングの安全機能
// SLP 安全制限ポジション
// SEL 安全緊急制限
// SCA 安全カム
// SRX 安全リファレンス
// SOS 安全制御停止
// SDI 安全方向
// SLS 安全速度制限
// SLI安全制限インクリメント
// SSx 安全停止 1/2
安全機能ロジック
RL Safe Robotics - - - - o o -
// AND, OR, XOR, timer, RS-Flip-Flopなど
通常安全要素を使用
// イネーブルボタン
// 非常停止
// ドアロック
// 両手操作ボタン
// リミットスイッチ
// ライトカーテン
// 運転モード選択スイッチ
// センサー
アウトプット要素
// セーフデジタルアウトプット
KeSafeシステムコンポーネントへの安全なインタフェース
// FSoE-Master über EtherCAT
基本
リアルタイム
PLC
モーション
ロボット
ロボットプラス
CNC
Page15
KemroX Runtime Licenses 015
安全機能
安全機能 (DU3x5用)
ロボット用安全機能
// SRTc 安全な直交ロボット移動
// SLSc 安全に制限された直交速度
単軸モニタリングの安全機能
// SLP 安全制限ポジション
// SEL 安全緊急制限
// SCA 安全カム
// SRX 安全リファレンス
// SOS 安全制御停止
// SDI 安全方向
// SLS 安全速度制限
// SLI安全制限インクリメント
// SSx 安全停止 1/2
安全機能ロジック
RL Safe Robotics Adv - - - - o o -
// AND, OR, XOR, timer, RS-Flip-Flopなど
通常安全要素を使用
// イネーブルボタン
// 非常停止
// ドアロック
// 両手操作ボタン
// リミットスイッチ
// ライトカーテン
// 運転モード選択スイッチ
// センサー
アウトプット要素
// セーフデジタルアウトプット
KeSafeシステムコンポーネントへの安全なインタフェース
// FSoE-Master über EtherCAT
RLo Safe Interface FSoE- FSoE-Slave over EtherCAT を介したより高いレベルの
- - - - o o -
Slave 安全コントローラ付データ交換用安全インタフェース
RLo Safe Interface PROFISafe-Slave over Profinet 経由のハイレベルデータ
- o o -
PROFIsafe F-Device エクスチェンジ用安全インタフェース - - -
RLo Safe Interface CIPSafety over EtherNet/IP経由のハイレベルデータ
- - - - o o -
CIPSafety-Target エクスチェンジ用安全インタフェース
基本
リアルタイム
PLC
モーション
ロボット
ロボットプラス
CNC
Page16
016 KEBA
KEBA Japan株式会社
〒135-009 東京都港区台場2-3-1 トレードピアお台場10階
Phone: 03-6712-9941 E-mail: office_japan@keba.com
本社所在地:
KEBA Industrial Automation GmbH
Reindlstraße 51, 4040 Linz/Austria, Phone +43 732 7090-0, keba@keba.com
KEBA Group worldwide
Austria / China / Czech Republic / Germany / India / Italy / Japan / Netherlands
Romania / Serbia / South Korea / Switzerland / Taiwan / Turkey / United Kingdom / USA
www.keba.com/jp
Copyright © (2023) KEBA Industrial Automation GmbH 2023_01_JP. Subject to change due to ongoing development of the technology. All information is provided without guarantee. All rights reserved.