


協働ロボットに最適な手動式ロボットハンドチェンジャー
このカタログについて
| ドキュメント名 | KOSMEK: マニュアルロボットハンドチェンジャー |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 3.1Mb |
| 取り扱い企業 | ダイドー株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
特長 形式表示・仕様 外形寸法 ロボット
インターフェース 注意事項
位置決め
操作説明(着脱方法) +
クランプ
位置決め
Manual Robotic Hand Changer ハンド・クランプ
マニュアル サポート
ロボットハンドチェンジャー バルブ・カプラ
電動製品
搬送製品
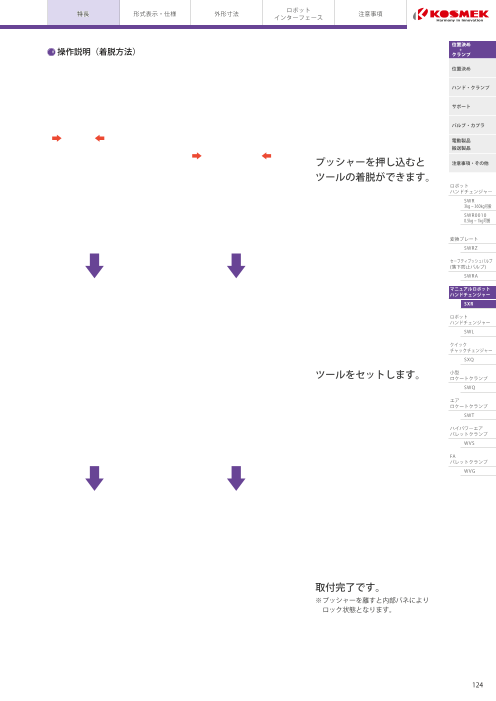
Model SXR プッシャーを押し込むと 注意事項・その他
ツールの着脱ができます。
ロボット
SXR0070(7~10kg可搬)を追加 ハンドチェンジャー
SWR
3kg ~ 360kg可搬
SWR0010
0.5kg ~ 1kg可搬
手動でワンタッチ交換が可能!
変換プレート
SWRZ
協働ロボットに最適な手動式ロボットハンドチェンジャー PAT.P.
セーフティプッシュバルブ
(落下防止バルブ)
SWRA
マニュアルロボット
ハンドチェンジャー
SXR
ロボット
ハンドチェンジャー
協働ロボットに最適! SWL
クイック
チャックチェンジャー
SXQ
ツールをセットします。 小型
ロケートクランプ
SWQ
エア
ロケートクランプ
SWT
ハイパワーエア
パレットクランプ
WVS
FA
パレットクランプ
WVG
マスターシリンダ
ツールアダプタ
取付完了です。
※ プッシャーを離すと内部バネにより
ロック状態となります。
手動でワンタッチ交換
123
Page2
特長 形式表示・仕様 外形寸法 ロボット
インターフェース 注意事項
位置決め
操作説明(着脱方法) +
クランプ
位置決め
Manual Robotic Hand Changer ハンド・クランプ
マニュアル サポート
ロボットハンドチェンジャー バルブ・カプラ
電動製品
搬送製品
Model SXR プッシャーを押し込むと 注意事項・その他
ツールの着脱ができます。
ロボット
SXR0070(7~10kg可搬)を追加 ハンドチェンジャー
SWR
3kg ~ 360kg可搬
SWR0010
0.5kg ~ 1kg可搬
手動でワンタッチ交換が可能!
変換プレート
SWRZ
協働ロボットに最適な手動式ロボットハンドチェンジャー PAT.P.
セーフティプッシュバルブ
(落下防止バルブ)
SWRA
マニュアルロボット
ハンドチェンジャー
SXR
ロボット
ハンドチェンジャー
協働ロボットに最適! SWL
クイック
チャックチェンジャー
SXQ
ツールをセットします。 小型
ロケートクランプ
SWQ
エア
ロケートクランプ
SWT
ハイパワーエア
パレットクランプ
WVS
FA
パレットクランプ
WVG
マスターシリンダ
ツールアダプタ
取付完了です。
※ プッシャーを離すと内部バネにより
ロック状態となります。
手動でワンタッチ交換
124
Page3
マニュアルロボットハンドチェンジャー model SXR 特長 形式表示・仕様 外形寸法 ロボット
インターフェース 注意事項
位置決め
形式表示:チェンジャー本体 形式表示:変換プレート 外形寸法:SXR0010 +
クランプ
※ 本図は、SXR0010のフルストローク状態を示します。 位置決め
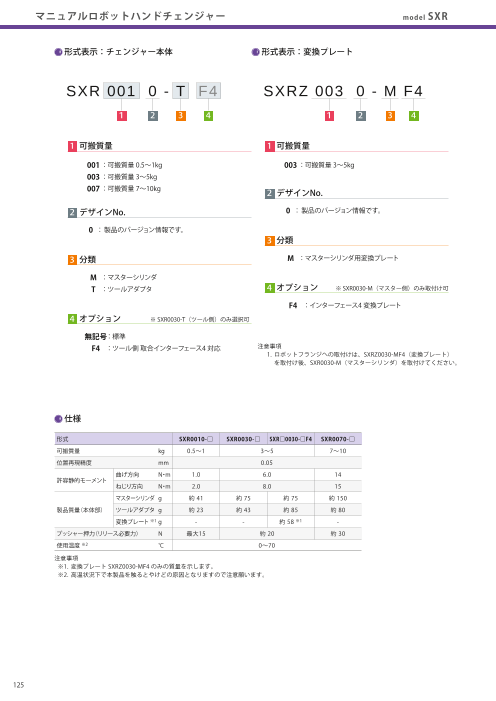
SXR 001 0 - T F4 SXRZ 003 0 - M F4 ハンド・クランプ
マスターシリンダ
サポート
1 2 3 4 1 2 3 4 SXR0010-M
バルブ・カプラ
27.4 27.4 電動製品
1 可搬質量 1 可搬質量 搬送製品
001 : 可搬質量 0.5~1kg 003 : 可搬質量 3~5kg プッシャー※1
注意事項・その他
003 : 可搬質量 3~5kg
リリース p.c.d
.25
007 : 可搬質量 7~10kg リリース ロボット
2 デザインNo. ハンドチェンジャー
SWR
3kg ~ 360kg可搬
2 デザインNo. 0 : 製品のバージョン情報です。
SWR0010
4-φ3.4トオシ 0.5kg ~ 1kg可搬
ザグリ 45°
φ6(裏カラ) 1-φ3+ 0.05 0 : 製品のバージョン情報です。 0 深3
3 分類 変換プレート
SWRZ
3 分類 M : マスターシリンダ用変換プレート φ42
セーフティプッシュバルブ
φ16 0- 0.03 (落下防止バルブ)
M : マスターシリンダ SWRA
T : ツールアダプタ 4 オプション ※ SXR0030-M(マスター側)のみ取付け可 マニュアルロボット
ハンドチェンジャー
F4 : インターフェース4 変換プレート SXR
4 オプション ※ SXR0030-T(ツール側)のみ選択可 φ12 φ8.4 ロボット
ハンドチェンジャー
φ36 SWL
無記号: 標準
F4 : ツール側 取合インターフェース4 対応 注意事項 クイック
チャックチェンジャー
1. ロボットフランジへの取付けは、SXRZ0030-MF4(変換プレート)
を取付け後、SXR0030-M(マスターシリンダ)を取付けてください。 SXQ
φ45
小型
ロケートクランプ
SWQ
エア
ロケートクランプ
φ16±0.03
仕様 SWT
φ42
ハイパワーエア
パレットクランプ
形式 SXR0010-□ SXR0030-□ SXR□0030-□F4 SXR0070-□
WVS
可搬質量 kg 0.5~1 3~ 5 7~10 4-M3×0.5ネジ深4
45° 1-φ3+ 0.05 0 深3 FA
位置再現精度 mm 0.05 パレットクランプ
WVG
曲げ方向 N・m 1.0 6. 0 14
許容静的モーメント
ねじり方向 N・m 2.0 8. 0 15
d.2
5
マスターシリンダ g 約 41 約 75 約 75 約 150 p.c
.
製品質量(本体部) ツールアダプタ g 約 23 約 43 約 85 約 80
変換プレート ※1 g - - 約 58 ※1 -
プッシャー押力(リリース必要力) N 最大15 約 20 約 30
使用温度 ※2 ℃ 0~70
注意事項
※1. 変換プレート SXRZ0030-MF4 のみの質量を示します。
※2. 高温状況下で本製品を触るとやけどの原因となりますので注意願います。 ツールアダプタ
SXR0010-T 注意事項
※1. 内部バネ力によりロック状態となり、2 ヶ所のプッシャーを
押し込むことでリリース状態となります。
125
1.6 13.8 1.5
3
45°
5.8
2.5 12.5±0.03
45°
12.5±0.03 15 5.3 8.5
16.9
3
接続時寸法 18
Page4
マニュアルロボットハンドチェンジャー model SXR 特長 形式表示・仕様 外形寸法 ロボット
インターフェース 注意事項
位置決め
形式表示:チェンジャー本体 形式表示:変換プレート 外形寸法:SXR0010 +
クランプ
※ 本図は、SXR0010のフルストローク状態を示します。 位置決め
SXR 001 0 - T F4 SXRZ 003 0 - M F4 ハンド・クランプ
マスターシリンダ
サポート
1 2 3 4 1 2 3 4 SXR0010-M
バルブ・カプラ
27.4 27.4 電動製品
1 可搬質量 1 可搬質量 搬送製品
001 : 可搬質量 0.5~1kg 003 : 可搬質量 3~5kg プッシャー※1
注意事項・その他
003 : 可搬質量 3~5kg
リリース p.c.d
.25
007 : 可搬質量 7~10kg リリース ロボット
2 デザインNo. ハンドチェンジャー
SWR
3kg ~ 360kg可搬
2 デザインNo. 0 : 製品のバージョン情報です。
SWR0010
4-φ3.4トオシ 0.5kg ~ 1kg可搬
ザグリ 45°
φ6(裏カラ) 1-φ3+ 0.05 0 : 製品のバージョン情報です。 0 深3
3 分類 変換プレート
SWRZ
3 分類 M : マスターシリンダ用変換プレート φ42
セーフティプッシュバルブ
φ16 0- 0.03 (落下防止バルブ)
M : マスターシリンダ SWRA
T : ツールアダプタ 4 オプション ※ SXR0030-M(マスター側)のみ取付け可 マニュアルロボット
ハンドチェンジャー
F4 : インターフェース4 変換プレート SXR
4 オプション ※ SXR0030-T(ツール側)のみ選択可 φ12 φ8.4 ロボット
ハンドチェンジャー
φ36 SWL
無記号: 標準
F4 : ツール側 取合インターフェース4 対応 注意事項 クイック
チャックチェンジャー
1. ロボットフランジへの取付けは、SXRZ0030-MF4(変換プレート)
を取付け後、SXR0030-M(マスターシリンダ)を取付けてください。 SXQ
φ45
小型
ロケートクランプ
SWQ
エア
ロケートクランプ
φ16±0.03
仕様 SWT
φ42
ハイパワーエア
パレットクランプ
形式 SXR0010-□ SXR0030-□ SXR□0030-□F4 SXR0070-□
WVS
可搬質量 kg 0.5~1 3~ 5 7~10 4-M3×0.5ネジ深4
45° 1-φ3+ 0.05 0 深3 FA
位置再現精度 mm 0.05 パレットクランプ
WVG
曲げ方向 N・m 1.0 6. 0 14
許容静的モーメント
ねじり方向 N・m 2.0 8. 0 15
d.2
5
マスターシリンダ g 約 41 約 75 約 75 約 150 p.c
.
製品質量(本体部) ツールアダプタ g 約 23 約 43 約 85 約 80
変換プレート ※1 g - - 約 58 ※1 -
プッシャー押力(リリース必要力) N 最大15 約 20 約 30
使用温度 ※2 ℃ 0~70
注意事項
※1. 変換プレート SXRZ0030-MF4 のみの質量を示します。
※2. 高温状況下で本製品を触るとやけどの原因となりますので注意願います。 ツールアダプタ
SXR0010-T 注意事項
※1. 内部バネ力によりロック状態となり、2 ヶ所のプッシャーを
押し込むことでリリース状態となります。
126
1.6 13.8 1.5
3
45°
5.8
2.5 12.5±0.03
45°
12.5±0.03 15 5.3 8.5
16.9
3
接続時寸法 18
Page5
マニュアルロボットハンドチェンジャー model SXR 特長 形式表示・仕様 外形寸法 ロボット
インターフェース 注意事項
位置決め
外形寸法:SXR0030 外形寸法:SXR0030-M+SXRZ0030-MF4 / SXR0030-TF4(インターフェース4対応) +
クランプ
※ 本図は、SXR0030のフルストローク状態を示します。 ※ 本図は、SXR0030-M+SXRZ0030-MF4 / SXR0030-TF4のフルストローク状態を示します。
位置決め
マスターシリンダ ハンド・クランプ
マスターシリンダ SXR0030-M
SXR0030-M サポート
変換プレート
SXRZ0030-MF4
35.1 35.1 バルブ・カプラ
35.1 35.1 電動製品
搬送製品
プッシャー ※1
注意事項・その他
p.c.d
.31.5
リリース リリース プッシャー ※1
ロボット
ハンドチェンジャー
.50
p.c.
d SWR
リリース リリース 3kg ~ 360kg可搬
SWR0010
0.5kg ~ 1kg可搬
4-φ5.3トオシ 45° 1- 5 + 0.05φ 0 深4
変換プレート
ザグリφ8.8(裏カラ)
SWRZ
φ52
4-φ6.8トオシ 1-φ6 + 0.05 0 深6 セーフティプッシュバルブ
φ20 0- 0.03 45° (落下防止バルブ)
ザグリφ10.5(裏カラ) 1-φ6平行ピン(付属)
SWRA
φ63 SXRZ0030-MF4
4-M6×10
0 変換プレート マニュアルロボット
φ31.5 - 0.03
φ1 取付低頭ボルト(付属) ハンドチェンジャー
6 SXR
ロボット
ハンドチェンジャー
φ18
SWL
φ45
1- クイック
φ5平行ピン(付属) チャックチェンジャー
φ56 SXQ
φ18 4-M5×0.8×14 小型
ロケートクランプ
φ45 SXR0030-M 取付ボルト(付属)
SWQ
マスターシリンダ
エア
φ56
φ20 + 0.03
ロケートクランプ
0 SWT
φ52
ハイパワーエア
1-φ5 + 0. 05
パレットクランプ
4-M5×0.8ネジ深5 0 深4
45°
WVS
FA
パレットクランプ
φ31.5 + 0.03 0 WVG
φ63 SXR0030-TF4
ツールアダプタ
p.c.
d.31
.5
45° 1-φ6 + 0.05 0 深6
0
d.5
4-M6ネジ深6 p.c
.
ツールアダプタ
SXR0030-T 注意事項 注意事項
※1. 内部バネ力によりロック状態となり、2 ヶ所のプッシャーを ※1. 内部バネ力によりロック状態となり、2 ヶ所のプッシャーを
押し込むことでリリース状態となります。 押し込むことでリリース状態となります。
1. ロボットフランジに SXRZ0030-MF4(変換プレート)を取付後、
SXR0030-M(マスターシリンダ)を取付けてください。
ツールアダプタ
SXR0030-TF4
127
2.1 16.8 2
3.5
45°
7.8
3
15.75 ±0.03
45°
15.75 ±0.03 18.5
6.7 10.1
20.9
12
4.5
接続時寸法 22
12
4.2 25 ±0.03
45°
6.5
24 45°25 ±0.03 6.7 10.1 8.5
2.1 25.3 3.5
6
φ16
12
4.5
接続時寸法 36
Page6
マニュアルロボットハンドチェンジャー model SXR 特長 形式表示・仕様 外形寸法 ロボット
インターフェース 注意事項
位置決め
外形寸法:SXR0030 外形寸法:SXR0030-M+SXRZ0030-MF4 / SXR0030-TF4(インターフェース4対応) +
クランプ
※ 本図は、SXR0030のフルストローク状態を示します。 ※ 本図は、SXR0030-M+SXRZ0030-MF4 / SXR0030-TF4のフルストローク状態を示します。
位置決め
マスターシリンダ ハンド・クランプ
マスターシリンダ SXR0030-M
SXR0030-M サポート
変換プレート
SXRZ0030-MF4
35.1 35.1 バルブ・カプラ
35.1 35.1 電動製品
搬送製品
プッシャー ※1
注意事項・その他
p.c.d
.31.5
リリース リリース プッシャー ※1
ロボット
ハンドチェンジャー
.50
p.c.
d SWR
リリース リリース 3kg ~ 360kg可搬
SWR0010
0.5kg ~ 1kg可搬
4-φ5.3トオシ 45° 1- 5 + 0.05φ 0 深4
変換プレート
ザグリφ8.8(裏カラ)
SWRZ
φ52
4-φ6.8トオシ 1-φ6 + 0.05 0 深6 セーフティプッシュバルブ
φ20 0- 0.03 45° (落下防止バルブ)
ザグリφ10.5(裏カラ) 1-φ6平行ピン(付属)
SWRA
φ63 SXRZ0030-MF4
4-M6×10
0 変換プレート マニュアルロボット
φ31.5 - 0.03
φ1 取付低頭ボルト(付属) ハンドチェンジャー
6 SXR
ロボット
ハンドチェンジャー
φ18
SWL
φ45
1- クイック
φ5平行ピン(付属) チャックチェンジャー
φ56 SXQ
φ18 4-M5×0.8×14 小型
ロケートクランプ
φ45 SXR0030-M 取付ボルト(付属)
SWQ
マスターシリンダ
エア
φ56
φ20 + 0.03
ロケートクランプ
0 SWT
φ52
ハイパワーエア
1-φ5 + 0. 05
パレットクランプ
4-M5×0.8ネジ深5 0 深4
45°
WVS
FA
パレットクランプ
φ31.5 + 0.03 0 WVG
φ63 SXR0030-TF4
ツールアダプタ
p.c.
d.31
.5
45° 1-φ6 + 0.05 0 深6
0
d.5
4-M6ネジ深6 p.c
.
ツールアダプタ
SXR0030-T 注意事項 注意事項
※1. 内部バネ力によりロック状態となり、2 ヶ所のプッシャーを ※1. 内部バネ力によりロック状態となり、2 ヶ所のプッシャーを
押し込むことでリリース状態となります。 押し込むことでリリース状態となります。
1. ロボットフランジに SXRZ0030-MF4(変換プレート)を取付後、
SXR0030-M(マスターシリンダ)を取付けてください。
ツールアダプタ
SXR0030-TF4
128
2.1 16.8 2
3.5
45°
7.8
3
15.75 ±0.03
45°
15.75 ±0.03 18.5
6.7 10.1
20.9
12
4.5
接続時寸法 22
12
4.2 25 ±0.03
45°
6.5
24 45°25 ±0.03 6.7 10.1 8.5
2.1 25.3 3.5
6
φ16
12
4.5
接続時寸法 36
Page7
ロボット
マニュアルロボットハンドチェンジャー model SXR 特長 形式表示・仕様 外形寸法 インターフェース 注意事項
位置決め
外形寸法:SXR0070 MEMO +
クランプ
※ 本図は、SXR0070のフルストローク状態を示します。
位置決め
ハンド・クランプ
マスターシリンダ
SXR0070-M サポート
43.9 43.9 バルブ・カプラ
電動製品
搬送製品
プッシャー ※1 注意事項・その他
0
p.c.
d.5
リリース リリース ロボット
ハンドチェンジャー
SWR
3kg ~ 360kg可搬
SWR0010
10 0.5kg ~ 1kg可搬
.8
変換プレート
4-φ6.8トオシ 45°
1-φ6 + 0 . 0 5 0 深5 SWRZ
φ68 セーフティプッシュバルブ
φ31.5 0 (落下防止バルブ)
- 0.03
SWRA
φ マニュアルロボット
16 ハンドチェンジャー
SXR
ロボット
ハンドチェンジャー
φ30
SWL
φ61
クイック
チャックチェンジャー
φ73 SXQ
小型
ロケートクランプ
SWQ
エア
ロケートクランプ
+ 0.03
φ31.5 0 SWT
φ68 ハイパワーエア
パレットクランプ
WVS
FA
4-M6ネジ深6.3 45°
1-φ6 + 0 . 0 5 0 深5 パレットクランプ
WVG
2-M3×0.5ネジ
強制リリース用ネジ※2
ツールアダプタ
SXR0070-T 注意事項
※1. 内部バネ力によりロック状態となり、2 ヶ所のプッシャーを
押し込むことでリリース状態となります。
※2. 強制リリース用ネジは異常時に使用します。
詳細は P.133 設計上の注意事項 4) ハンド交換 ( 着脱 ) について
を参照ください。
129
2.4 18 2.5
4
4
1 54° °
7.5
p.c.d.50
4
45°
14° 25±0.03 20.5
25 ±0.03
6.8 11.2
22.9
12
4.3
7.5※2
接続時寸法 24.5
Page8
ロボット
マニュアルロボットハンドチェンジャー model SXR 特長 形式表示・仕様 外形寸法 インターフェース 注意事項
位置決め
外形寸法:SXR0070 MEMO +
クランプ
※ 本図は、SXR0070のフルストローク状態を示します。
位置決め
ハンド・クランプ
マスターシリンダ
SXR0070-M サポート
43.9 43.9 バルブ・カプラ
電動製品
搬送製品
プッシャー ※1 注意事項・その他
0
p.c.
d.5
リリース リリース ロボット
ハンドチェンジャー
SWR
3kg ~ 360kg可搬
SWR0010
10 0.5kg ~ 1kg可搬
.8
変換プレート
4-φ6.8トオシ 45°
1-φ6 + 0 . 0 5 0 深5 SWRZ
φ68 セーフティプッシュバルブ
φ31.5 0 (落下防止バルブ)
- 0.03
SWRA
φ マニュアルロボット
16 ハンドチェンジャー
SXR
ロボット
ハンドチェンジャー
φ30
SWL
φ61
クイック
チャックチェンジャー
φ73 SXQ
小型
ロケートクランプ
SWQ
エア
ロケートクランプ
+ 0.03
φ31.5 0 SWT
φ68 ハイパワーエア
パレットクランプ
WVS
FA
4-M6ネジ深6.3 45°
1-φ6 + 0 . 0 5 0 深5 パレットクランプ
WVG
2-M3×0.5ネジ
強制リリース用ネジ※2
ツールアダプタ
SXR0070-T 注意事項
※1. 内部バネ力によりロック状態となり、2 ヶ所のプッシャーを
押し込むことでリリース状態となります。
※2. 強制リリース用ネジは異常時に使用します。
詳細は P.133 設計上の注意事項 4) ハンド交換 ( 着脱 ) について
を参照ください。
130
2.4 18 2.5
4
4
1 54° °
7.5
p.c.d.50
4
45°
14° 25±0.03 20.5
25 ±0.03
6.8 11.2
22.9
12
4.3
7.5※2
接続時寸法 24.5
Page9
マニュアルロボットハンドチェンジャー mo 特長 形式表示・仕様 形寸法 ロボット
del SXR 外 インターフェース 注意事項
位置決め
インタフェース番号(ISO9409-1準拠)と SXRの組合せ メカニカルインタフェースの基準形状 +
クランプ
注意事項 位置決め
SXR の組合せ 1. 変換プレートを設計、製作される場合は、下記の形状および SXR の外形寸法を参考にしてください。
2. 本図は参考図です。各ロボットの仕様や寸法に応じてプレート厚さや取付位相、ロボット周辺等を考慮して、
マスターシリンダ 変換プレート ツールアダプタ 変換プレートを設計・製作してください。 ハンド・クランプ
2 SXR0030-M - SXR0030-T サポート
4 SXR0030-M SXRZ0030-MF4 SXR0030-TF4
インタフェース番号 バルブ・カプラ
4 SXR0070-M - SXR0070-T メカニカルインタフェース番号:2
電動製品
準拠せず SXR0010-M - SXR0010-T 搬送製品
+ 0.012
1-φ5 H7 0 注意事項・その他
45°
協働ロボット取付対応
ロボット
ハンドチェンジャー
マスターシリンダ マスターシリンダ SWR
p.c.d. 3
1.5
SXR0010-M SXR0030-M 3kg ~ 360kg可搬
SWR0010
変換プレート 0.5kg ~ 1kg可搬
SXRZ0030-MF4
φ40 h8 0- 0. 変換プレート
039
SWRZ
セーフティプッシュバルブ
(落下防止バルブ)
4-M5×0.8 ネジ SWRA
(90°ピッチ)
マニュアルロボット
ハンドチェンジャー
SXR
ロボット
ハンドチェンジャー
SWL
メカニカルインタフェース番号:4
クイック
チャックチェンジャー
SXQ
1-φ6 H7 + 0.015 0 小型
45° ロケートクランプ
ツールアダプタ SWQ
SXR0030-TF4
ツールアダプタ エア
0-T ロボット対応例: CO ロボット対応例: UR
SXR001 BOTTA ロケートクランプ
ロボットフランジインタフェース番号4に SWT
対応したロボットに直接取付可能 ハイパワーエア
※ SXR0070の場合は変換プレートが不要です。 p.c.d. 5
0
パレットクランプ
WVS
FA
パレットクランプ
WVG
φ63 h8 0- 0.046
4-M6 ネジ
(90°ピッチ)
ロボット対応例: TM ROBOT ロボット対応例: ASSISTA
131
φ
φ 23 01 . H5 7 + H
0
0 .07 + 2
1
0
0 .025
Page10
マニュアルロボットハンドチェンジャー mo 特長 形式表示・仕様 形寸法 ロボット
del SXR 外 インターフェース 注意事項
位置決め
インタフェース番号(ISO9409-1準拠)と SXRの組合せ メカニカルインタフェースの基準形状 +
クランプ
注意事項 位置決め
SXR の組合せ 1. 変換プレートを設計、製作される場合は、下記の形状および SXR の外形寸法を参考にしてください。
2. 本図は参考図です。各ロボットの仕様や寸法に応じてプレート厚さや取付位相、ロボット周辺等を考慮して、
マスターシリンダ 変換プレート ツールアダプタ 変換プレートを設計・製作してください。 ハンド・クランプ
2 SXR0030-M - SXR0030-T サポート
4 SXR0030-M SXRZ0030-MF4 SXR0030-TF4
インタフェース番号 バルブ・カプラ
4 SXR0070-M - SXR0070-T メカニカルインタフェース番号:2
電動製品
準拠せず SXR0010-M - SXR0010-T 搬送製品
+ 0.012
1-φ5 H7 0 注意事項・その他
45°
協働ロボット取付対応
ロボット
ハンドチェンジャー
マスターシリンダ マスターシリンダ SWR
p.c.d. 3
1.5
SXR0010-M SXR0030-M 3kg ~ 360kg可搬
SWR0010
変換プレート 0.5kg ~ 1kg可搬
SXRZ0030-MF4
φ40 h8 0- 0. 変換プレート
039
SWRZ
セーフティプッシュバルブ
(落下防止バルブ)
4-M5×0.8 ネジ SWRA
(90°ピッチ)
マニュアルロボット
ハンドチェンジャー
SXR
ロボット
ハンドチェンジャー
SWL
メカニカルインタフェース番号:4
クイック
チャックチェンジャー
SXQ
1-φ6 H7 + 0.015 0 小型
45° ロケートクランプ
ツールアダプタ SWQ
SXR0030-TF4
ツールアダプタ エア
0-T ロボット対応例: CO ロボット対応例: UR
SXR001 BOTTA ロケートクランプ
ロボットフランジインタフェース番号4に SWT
対応したロボットに直接取付可能 ハイパワーエア
※ SXR0070の場合は変換プレートが不要です。 p.c.d. 5
0
パレットクランプ
WVS
FA
パレットクランプ
WVG
φ63 h8 0- 0.046
4-M6 ネジ
(90°ピッチ)
ロボット対応例: TM ROBOT ロボット対応例: ASSISTA
132
φ
φ 23 01 . H5 7 + H
0
0 .07 + 2
1
0
0 .025
Page11
トハンドチェンジャー 注意事項 XR 特長 形式表示・仕様 外形寸法 ロボット
マニュアルロボッ model S インターフェース 注意事項
位置決め
注意事項 +
クランプ
● 設計上の注意事項 ● 施工上の注意事項 ● 取扱い上の注意事項 ● 保守・点検 位置決め
1)仕様の確認 1)マスターシリンダ / ツールアダプタの取付け、取外し 1)ハンド交換(脱着)時、ツールの落下にご注意ください。 1)機器の取外しの注意 ハンド・クランプ
● 各製品の仕様を確認の上、ご使用ください。 ● 取付ボルトは、下表のトルクで締付けてください。 ● マニュアルロボットハンドチェンジャーをリリースする際は、 ● 機器を取外す時は、被駆動物体の落下防止処置や暴走防止処置等
● 本機器は内部バネ力によりロック状態となり、2 ヶ所のプッシャー 取付けの際は位置決めピンを使用し、マスターシリンダ / ツー 必ずツールの落下防止措置がなされていることを確認してから がなされていることを確認してから行ってください。 サポート
を押込むことでリリース状態となります。 ルアダプタが傾かないようにボルトで均等に締付けてください。 行ってください。ツールの破損や人身事故につながります。 また、再起動する場合は、ボルトや各部の異常がないか確認し
(フルストローク状態からロック状態にする際もプッシャーを押込 位置決めピンを使用せずに取付けた場合、モーメント特性が確 た後に行ってください。 バルブ・カプラ
んでください。) 保されないことがあります。 2)充分な知識と経験を持った人が取扱ってください。 電動製品
● 機械・装置の取扱い、メンテナンス等は、充分な知識と経験を 2)マスターシリンダ・ツールアダプタの清掃について 搬送製品
2)マスターシリンダとツールアダプタの組合せについて 形式 ボルト呼び ボルト本数 締付トルク 持った人が行ってください。 ● マスターシリンダやツールアダプタに汚れや異物、粘性の高い
SXR0010-M M3×0.5 4 1.3N・m 注意事項・その他
● マスターシリンダとツールアダプタは下表の組合せで使用してくだ 物質が固着したまま使用すると、位置決め精度不良や動作不良
さい。 マスターシリンダ SXR0030-M M5×0.8 4 6.3N・m
3)安全を確保するまでは、機器の取扱い、取外しを絶対に行わない の原因になります。
SXR0070-M M6 4 10N・m
でください。 ロボット
マスターシリンダ ツールアダプタ SXR0010-T M3×0.5 4 1.3N・m ハンドチェンジャー
SXR0010-M SXR0010-T SXR0030-T M5×0.8 4 6.3N・m ① 機械・装置の点検や整備は、被駆動物体の落下防止処置や暴走 SWR
ツールアダプタ
SXR0030-T SXR0030-TF4 M6 4 10N・m 防止処置等がなされていることを確認してから行ってください。 3kg ~ 360kg可搬
SXR0030-M SWR0010
SXR0030-TF4 SXR0070-T M6 4 10N・m ② 機器を取外すときは、上述の安全処置がとられていることの確認 0.5kg ~ 1kg可搬
SXR0070-M SXR0070-T 変換プレート SXRZ0030-MF4 M6 4 5.3N・m をしてから行ってください。
③ 運転停止直後の機器の取外しは、機器の温度が上がっている場合 変換プレート
3)許容静的モーメントについて がありますので、温度が下がってから行ってください。 SWRZ
● 許容静的モーメントは、曲げ方向モーメントおよび、ねじり方向 ④ 機械・装置を再起動する場合は、ボルトや各部の異常がないか セーフティプッシュバルブ
モーメントのそれぞれの範囲内で使用してください。 確認した後に行ってください。 (落下防止バルブ)
3)取付ボルトに緩みがないか定期的に増し締め点検を行ってくだ SWRA
形式 曲げ方向モーメント ねじり方向モーメント 4)分解や改造はしないでください。 さい。 マニュアルロボット
SXR0010 1N・m 2N・m ハンドチェンジャー
● 分解や改造をされますと、保証期間内であっても保証ができなく
SXR0030 6N・m 8N・m SXR
なります。 4)動作はスムーズで異音等がないか確認してください。
SXR0070 14N・m 15N・m ● 長期間放置した後、再起動する場合は正しく動作することを ロボット
ハンドチェンジャー
確認してください。 SWL
曲げ方向とねじり方向両方のモーメントが複合して作用する場合
には、それぞれのモーメントを合成して求めてください。 クイック
5)製品を保管する場合は、直射日光・水分等から保護して冷暗所 チャックチェンジャー
また、モーメントに対して余裕を持ったサイズを選定してください。 にて行ってください。 SXQ
小型
複合モーメント= (曲げ方向モーメント2 + ねじり方向モーメント2) 6)オーバーホール・修理は当社にお申しつけください。 ロケートクランプ
SWQ
エア
4)ハンド交換(脱着)について ロケートクランプ
● マスターシリンダとツールアダプタは水平に接続させてください。 SWT
接続時に傾きがあると、機器がこじったり、かみ込んでクランプ ハイパワーエア
する恐れがあります。かみ込んでクランプした場合、リリースする パレットクランプ
WVS
際に、非常に大きなプッシャー押力が必要となります。
SXR0070 の場合、手動でリリースすることが難しくなる可能性が FA
パレットクランプ
あります。ツールアダプタに強制リリース用ネジを設けています WVG
ので、ボルト等を取り付けてプッシャー部を押し込み強制リリース
させてください。
5)横向き姿勢でハンド交換(脱着)を行う場合について
● マニュアルロボットハンドチェンジャーを横向き姿勢で接続・分離
する場合、過大なモーメントを受けないように行ってください。
マニュアルロボットハンドチェンジャーの選定は、可搬質量に対し
て余裕をもったサイズを選定してください。
※ 共通注意事項はP.906を参照してください。 ・ 保証
133
Page12
トハンドチェンジャー 注意事項 XR 特長 形式表示・仕様 外形寸法 ロボット
マニュアルロボッ model S インターフェース 注意事項
位置決め
注意事項 +
クランプ
● 設計上の注意事項 ● 施工上の注意事項 ● 取扱い上の注意事項 ● 保守・点検 位置決め
1)仕様の確認 1)マスターシリンダ / ツールアダプタの取付け、取外し 1)ハンド交換(脱着)時、ツールの落下にご注意ください。 1)機器の取外しの注意 ハンド・クランプ
● 各製品の仕様を確認の上、ご使用ください。 ● 取付ボルトは、下表のトルクで締付けてください。 ● マニュアルロボットハンドチェンジャーをリリースする際は、 ● 機器を取外す時は、被駆動物体の落下防止処置や暴走防止処置等
● 本機器は内部バネ力によりロック状態となり、2 ヶ所のプッシャー 取付けの際は位置決めピンを使用し、マスターシリンダ / ツー 必ずツールの落下防止措置がなされていることを確認してから がなされていることを確認してから行ってください。 サポート
を押込むことでリリース状態となります。 ルアダプタが傾かないようにボルトで均等に締付けてください。 行ってください。ツールの破損や人身事故につながります。 また、再起動する場合は、ボルトや各部の異常がないか確認し
(フルストローク状態からロック状態にする際もプッシャーを押込 位置決めピンを使用せずに取付けた場合、モーメント特性が確 た後に行ってください。 バルブ・カプラ
んでください。) 保されないことがあります。 2)充分な知識と経験を持った人が取扱ってください。 電動製品
● 機械・装置の取扱い、メンテナンス等は、充分な知識と経験を 2)マスターシリンダ・ツールアダプタの清掃について 搬送製品
2)マスターシリンダとツールアダプタの組合せについて 形式 ボルト呼び ボルト本数 締付トルク 持った人が行ってください。 ● マスターシリンダやツールアダプタに汚れや異物、粘性の高い
SXR0010-M M3×0.5 4 1.3N・m 注意事項・その他
● マスターシリンダとツールアダプタは下表の組合せで使用してくだ 物質が固着したまま使用すると、位置決め精度不良や動作不良
さい。 マスターシリンダ SXR0030-M M5×0.8 4 6.3N・m
3)安全を確保するまでは、機器の取扱い、取外しを絶対に行わない の原因になります。
SXR0070-M M6 4 10N・m
でください。 ロボット
マスターシリンダ ツールアダプタ SXR0010-T M3×0.5 4 1.3N・m ハンドチェンジャー
SXR0010-M SXR0010-T SXR0030-T M5×0.8 4 6.3N・m ① 機械・装置の点検や整備は、被駆動物体の落下防止処置や暴走 SWR
ツールアダプタ
SXR0030-T SXR0030-TF4 M6 4 10N・m 防止処置等がなされていることを確認してから行ってください。 3kg ~ 360kg可搬
SXR0030-M SWR0010
SXR0030-TF4 SXR0070-T M6 4 10N・m ② 機器を取外すときは、上述の安全処置がとられていることの確認 0.5kg ~ 1kg可搬
SXR0070-M SXR0070-T 変換プレート SXRZ0030-MF4 M6 4 5.3N・m をしてから行ってください。
③ 運転停止直後の機器の取外しは、機器の温度が上がっている場合 変換プレート
3)許容静的モーメントについて がありますので、温度が下がってから行ってください。 SWRZ
● 許容静的モーメントは、曲げ方向モーメントおよび、ねじり方向 ④ 機械・装置を再起動する場合は、ボルトや各部の異常がないか セーフティプッシュバルブ
モーメントのそれぞれの範囲内で使用してください。 確認した後に行ってください。 (落下防止バルブ)
3)取付ボルトに緩みがないか定期的に増し締め点検を行ってくだ SWRA
形式 曲げ方向モーメント ねじり方向モーメント 4)分解や改造はしないでください。 さい。 マニュアルロボット
SXR0010 1N・m 2N・m ハンドチェンジャー
● 分解や改造をされますと、保証期間内であっても保証ができなく
SXR0030 6N・m 8N・m SXR
なります。 4)動作はスムーズで異音等がないか確認してください。
SXR0070 14N・m 15N・m ● 長期間放置した後、再起動する場合は正しく動作することを ロボット
ハンドチェンジャー
確認してください。 SWL
曲げ方向とねじり方向両方のモーメントが複合して作用する場合
には、それぞれのモーメントを合成して求めてください。 クイック
5)製品を保管する場合は、直射日光・水分等から保護して冷暗所 チャックチェンジャー
また、モーメントに対して余裕を持ったサイズを選定してください。 にて行ってください。 SXQ
小型
複合モーメント= (曲げ方向モーメント2 + ねじり方向モーメント2) 6)オーバーホール・修理は当社にお申しつけください。 ロケートクランプ
SWQ
エア
4)ハンド交換(脱着)について ロケートクランプ
● マスターシリンダとツールアダプタは水平に接続させてください。 SWT
接続時に傾きがあると、機器がこじったり、かみ込んでクランプ ハイパワーエア
する恐れがあります。かみ込んでクランプした場合、リリースする パレットクランプ
WVS
際に、非常に大きなプッシャー押力が必要となります。
SXR0070 の場合、手動でリリースすることが難しくなる可能性が FA
パレットクランプ
あります。ツールアダプタに強制リリース用ネジを設けています WVG
ので、ボルト等を取り付けてプッシャー部を押し込み強制リリース
させてください。
5)横向き姿勢でハンド交換(脱着)を行う場合について
● マニュアルロボットハンドチェンジャーを横向き姿勢で接続・分離
する場合、過大なモーメントを受けないように行ってください。
マニュアルロボットハンドチェンジャーの選定は、可搬質量に対し
て余裕をもったサイズを選定してください。
※ 共通注意事項はP.906を参照してください。 ・ 保証
134
Page13
注意事項 取扱い上の注意事項 保守・点検 保証
位置決め
注意事項 +
クランプ
● 取扱い上の注意事項 ● 保守・点検 ● 保証 位置決め
1)十分な知識と経験を持った人が取扱ってください。 1)機器の取外しと圧力源の遮断 1)保証期間 ハンド・クランプ
● 油空圧機器を使用した機械・装置の取扱い、メンテナンス等 は、 ● 機器を取外す時は、被駆動物体の落下防止処置や暴走防止処置等 ● 製品の保証期間は、当社工場出荷後 1 年半、または使用開始後
充分な知識と経験を持った人が行ってください。 がなされていることを確認し、圧力源や電源を遮断して油圧・ 1 年のうち短い方が適用されます。 サポート
エア回路中に圧力が無くなったことを確認した後に行ってくだ
2)安全を確保するまでは、機器の取扱い、取外しを絶対に行わない さい。 2)保証範囲 バルブ・カプラ
でください。 ● 再起動する場合は、ボルトや各部の異常が無いか確認した後に ● 保証期間中に当社の責任によって故障や不適合を生じた場合は、 電動製品
① 機械・装置の点検や整備は、被駆動物体の落下防止処置や暴走 行ってください。 その機器の故障部分の交換または、修理を当社の責任で行います。 搬送製品
防止処置等がなされていることを確認してから行ってください。 ただし、次の項目に該当するような製品の管理にかかわる故障
注意事項・その他
② 機器を取外すときは、上述の安全処置がとられていることの確認 2)ピストンロッド、プランジャ周りは定期的に清掃してください。 などは、この保証の対象範囲から除外させていただきます。
を行い、圧力源や電源を遮断し、油圧・エア回路中に圧力が無く ● 表面に汚れが固着したまま使用すると、パッキン・シール等を
なったことを確認してから行ってください。 傷付け、動作不良や油・エア漏れの原因となります。 ① 決められた保守・点検が行われていない場合。
注意事項
③ 運転停止直後の機器の取外しは、機器の温度が上がっている場合 ② 使用者側の判断により、不適合状態のまま使用され、これに起因 取扱い上の注意事項
がありますので、温度が下がってから行ってください。 する故障などの場合。 保守・点検
④ 機械・装置を再起動する場合は、ボルトや各部の異常がないか ③ 使用者側の不適切な使用や取扱いによる場合。 保証
確認した後に行ってください。 (第三者の不当行為による破損なども含みます。)
④ 故障の原因が当社製品以外の事由による場合。 表記改定のお知らせ
3)クランプ(シリンダ)動作中は、クランプ(シリンダ)に触れないで ⑤ 当社が行った以外の改造や修理、また当社が了承・確認して
ください。手を挟まれ、けがの原因になります。 いない改造や修理に起因する場合。 会社案内
⑥ その他、天災や災害に起因し、当社の責任でない場合。 会社概要
⑦ 消耗や劣化に起因する部品費用または交換費用 取扱商品
(ゴム・プラスチック・シール材および一部の電装品など) 沿革
3)位置決め機器 (SWQ/SWT/SWP/VRA/VRC/VX/VXE/VXF/WVS/
索引
WVG/VWH/VWM/VWK) の各基準面(テーパ基準面や着座面)は なお、製品の故障によって誘発される損害は、保証の対象範囲から
形式検索
定期的に清掃してください。 除外させていただきます。
● 位置決め機器 (VRA/VRC/VX/VXE/VXF を除く、SWR はエアブロー
営業拠点
4)万一、ワークが脱落する危険に備え、ワーク搬送時には周辺に ポート付きの場合のみ)にはクリーニング機構(エアブロー機構)
人がいない等、安全を確保してください。 があり、異物や液体の除去を行うことが出来ます。
但し、固着した異物や粘性のある液体等除去できない場合も
5)分解や改造はしないでください。 ありますので、ワーク・パレット装着時は異物が無いことを
● 分解や改造をされますと、保証期間内であっても保証ができなく 確認して装着してください。
なります。 ● 汚れが固着したまま使用すると、位置決め精度不良や動作不良、
エア漏れ・油漏れの原因になります。
4)配管・取付ボルト・ナット・止め輪・シリンダ等に緩みがないか
定期的に増締め点検を行ってください。
5)作動油に劣化がないか確認してください。
6)動作はスムーズで異音等がないか確認してください。
● 特に、長期間放置した後、再起動する場合は正しく動作する
ことを確認してください。
7)製品を保管する場合は、直射日光・水分等から保護して冷暗所
にて行ってください。
8)オーバーホール・修理は当社にお申しつけください。
905
Page14
注意事項 取扱い上の注意事項 保守・点検 保証
位置決め
注意事項 +
クランプ
● 取扱い上の注意事項 ● 保守・点検 ● 保証 位置決め
1)十分な知識と経験を持った人が取扱ってください。 1)機器の取外しと圧力源の遮断 1)保証期間 ハンド・クランプ
● 油空圧機器を使用した機械・装置の取扱い、メンテナンス等 は、 ● 機器を取外す時は、被駆動物体の落下防止処置や暴走防止処置等 ● 製品の保証期間は、当社工場出荷後 1 年半、または使用開始後
充分な知識と経験を持った人が行ってください。 がなされていることを確認し、圧力源や電源を遮断して油圧・ 1 年のうち短い方が適用されます。 サポート
エア回路中に圧力が無くなったことを確認した後に行ってくだ
2)安全を確保するまでは、機器の取扱い、取外しを絶対に行わない さい。 2)保証範囲 バルブ・カプラ
でください。 ● 再起動する場合は、ボルトや各部の異常が無いか確認した後に ● 保証期間中に当社の責任によって故障や不適合を生じた場合は、 電動製品
① 機械・装置の点検や整備は、被駆動物体の落下防止処置や暴走 行ってください。 その機器の故障部分の交換または、修理を当社の責任で行います。 搬送製品
防止処置等がなされていることを確認してから行ってください。 ただし、次の項目に該当するような製品の管理にかかわる故障
注意事項・その他
② 機器を取外すときは、上述の安全処置がとられていることの確認 2)ピストンロッド、プランジャ周りは定期的に清掃してください。 などは、この保証の対象範囲から除外させていただきます。
を行い、圧力源や電源を遮断し、油圧・エア回路中に圧力が無く ● 表面に汚れが固着したまま使用すると、パッキン・シール等を
なったことを確認してから行ってください。 傷付け、動作不良や油・エア漏れの原因となります。 ① 決められた保守・点検が行われていない場合。
注意事項
③ 運転停止直後の機器の取外しは、機器の温度が上がっている場合 ② 使用者側の判断により、不適合状態のまま使用され、これに起因 取扱い上の注意事項
がありますので、温度が下がってから行ってください。 する故障などの場合。 保守・点検
④ 機械・装置を再起動する場合は、ボルトや各部の異常がないか ③ 使用者側の不適切な使用や取扱いによる場合。 保証
確認した後に行ってください。 (第三者の不当行為による破損なども含みます。)
④ 故障の原因が当社製品以外の事由による場合。 表記改定のお知らせ
3)クランプ(シリンダ)動作中は、クランプ(シリンダ)に触れないで ⑤ 当社が行った以外の改造や修理、また当社が了承・確認して
ください。手を挟まれ、けがの原因になります。 いない改造や修理に起因する場合。 会社案内
⑥ その他、天災や災害に起因し、当社の責任でない場合。 会社概要
⑦ 消耗や劣化に起因する部品費用または交換費用 取扱商品
(ゴム・プラスチック・シール材および一部の電装品など) 沿革
3)位置決め機器 (SWQ/SWT/SWP/VRA/VRC/VX/VXE/VXF/WVS/
索引
WVG/VWH/VWM/VWK) の各基準面(テーパ基準面や着座面)は なお、製品の故障によって誘発される損害は、保証の対象範囲から
形式検索
定期的に清掃してください。 除外させていただきます。
● 位置決め機器 (VRA/VRC/VX/VXE/VXF を除く、SWR はエアブロー
営業拠点
4)万一、ワークが脱落する危険に備え、ワーク搬送時には周辺に ポート付きの場合のみ)にはクリーニング機構(エアブロー機構)
人がいない等、安全を確保してください。 があり、異物や液体の除去を行うことが出来ます。
但し、固着した異物や粘性のある液体等除去できない場合も
5)分解や改造はしないでください。 ありますので、ワーク・パレット装着時は異物が無いことを
● 分解や改造をされますと、保証期間内であっても保証ができなく 確認して装着してください。
なります。 ● 汚れが固着したまま使用すると、位置決め精度不良や動作不良、
エア漏れ・油漏れの原因になります。
4)配管・取付ボルト・ナット・止め輪・シリンダ等に緩みがないか
定期的に増締め点検を行ってください。
5)作動油に劣化がないか確認してください。
6)動作はスムーズで異音等がないか確認してください。
● 特に、長期間放置した後、再起動する場合は正しく動作する
ことを確認してください。
7)製品を保管する場合は、直射日光・水分等から保護して冷暗所
にて行ってください。
8)オーバーホール・修理は当社にお申しつけください。
906
Page15
会社案内
営業拠点 Address エリア別営業拠点
国内営業拠点
本社・工場 TEL.078-991-5115 FAX.078-991-8787
関西営業所 〒651-2241 兵庫県神戸市西区室谷2丁目1番5号
関東営業所 TEL.048-652-8839 FAX.048-652-8828 近畿・中国・四国エリア 北海道・東北・関東・甲信越・長野(北信)エリア
海外に関するお問い合わせ
〒331-0815 埼玉県さいたま市北区大成町4丁目81番地 関西営業所・海外営業(神戸市) 関東営業所(さいたま市)
西関東出張所 TEL.048-652-8839 FAX.048-652-8828 西関東出張所(神奈川県厚木市)
〒243-0014 神奈川県厚木市旭町5 丁目35-1-305
九州エリア
中部営業所 TEL.0566-74-8778 FAX.0566-74-8808 九州営業所(福岡市) 東海・北陸・長野(南信)エリア
中部営業所(愛知県安城市)
〒446-0076 愛知県安城市美園町2丁目10番地1
九州営業所 TEL.092-433-0424 FAX.092-433-0426
〒812-0006 福岡県福岡市博多区上牟田1丁目8-10-101 Global Network
TEL.+81-78-991-5162 FAX.+81-78-991-8787
海外営業 〒651-2241 兵庫県神戸市西区室谷2丁目1番5号
KOSMEK LTD. 1-5, 2-chome, Murotani, Nishi-ku, Kobe-city, Hyogo, 651-2241 Japan
海外営業拠点
Europe
KOSMEK (USA) LTD. TEL. +1-630-620-7650 FAX. +1-630-620-9015
USA 650 Springer Drive, Lombard, IL 60148 USA India U.S.A.
現地法人
アメリカ合衆国 アトランタ支店 TEL. +1-708-577-3275 Asia Mexico
KOSMEK (USA) LTD. Atlanta Office 303 Perimeter Center North, Suite 300, Atlanta, GA 30346 USA
Mexico メキシコ支店 TEL. +52-1-55-3044-9983
メキシコ KOSMEK (USA) LTD. Mexico Office Av. Santa Fe 103, Int. 59, col. Santa Fe Juriquilla, Queretaro, QRO, 76230, Mexico Brazil
Australia
Europe KOSMEK EUROPE GmbH TEL. +43-463-287587 FAX. +43-463-287587-20
ヨーロッパ 現地法人 Schleppeplatz 2 9020 Klagenfurt am Wörthersee Austria
TEL.+86-21-54253000 FAX.+86-21-54253709
考世美(上海)貿易有限公司
中国上海市浦东新区浦三路21弄55号银亿滨江中心601室
KOSMEK (CHINA) LTD. 現地法人 Room601, RIVERSIDE PYRAMID No.55, Lane21, Pusan Rd, Pudong Shanghai China Korea
China TEL.+86-769-85300880
東莞事務所
広東東莞長安鎮徳政西路15号宏基本大厦301号室 China Japan
中国 考世美(上海)貿易有限公司 Room301, AcerBuilding No.15, Dezheng(W)Road, Changan Town Dongguan Guangdong 523843., P.R.China
TEL.+86-27-59822303
武漢事務所
湖北省武漢市沌口経済開発区経開未来城A棟-502室 Taiwan
考世美(上海)貿易有限公司 Room502, Building A, Jingkai Future City, Zhuankou Economic Development Zone, Wuhan City, Hubei Province, 430050 China
現地法人および営業所
India Thailand
KOSMEK LTD. - INDIA TEL. +91-9880561695 Philippines
販売店
インド 支店 4A/Old No:649, Ground Floor, 4th D cross, MM Layout, Kavalbyrasandra, RT Nagar, Bangalore -560032 India
Malaysia
Thailand タイ事務所 TEL. +66-2-300-5132 FAX. +66-2-300-5133
Singapore
タイ Thailand Representative Off ice 67 Soi 58, RAMA 9 Rd., Phatthanakan, Suanluang, Bangkok 10250, Thailand
Taiwan TEL. +886-2-82261860 FAX. +886-2-82261890 Indonesia
盈生貿易有限公司
台湾新北市中和區建八路2號 16F-4(遠東世紀廣場)
台湾 Full Life Trading Co., Ltd. 総代理店 16F-4, No.2, Jian Ba Rd., Zhonghe District, New Taipei City Taiwan 23511
Philippines G.E.T. Inc, Phil. TEL.+63-2-310-7286 FAX. +63-2-310-7286
フィリピン 総代理店 Victoria Wave Special Economic Zone Mt. Apo Building, Brgy. 186, North Caloocan City, Metro Manila, Philippines 1427
Indonesia PT. Yamata Machinery TEL. +62-21-29628607 FAX. +62-21-29628608
●記載以外の仕様および寸法については、別途お問い合わせください。
インドネシア 総代理店 Delta Commercial Park I, Jl. Kenari Raya B-08, Desa Jayamukti Kec. Cikarang Pusat Kab. Bekasi 17530 Indonesia ●このカタログの仕様は予告なしに変更することがあります。
927
Page16
会社案内
営業拠点 Address エリア別営業拠点
国内営業拠点
本社・工場 TEL.078-991-5115 FAX.078-991-8787
関西営業所 〒651-2241 兵庫県神戸市西区室谷2丁目1番5号
関東営業所 TEL.048-652-8839 FAX.048-652-8828 近畿・中国・四国エリア 北海道・東北・関東・甲信越・長野(北信)エリア
海外に関するお問い合わせ
〒331-0815 埼玉県さいたま市北区大成町4丁目81番地 関西営業所・海外営業(神戸市) 関東営業所(さいたま市)
西関東出張所 TEL.048-652-8839 FAX.048-652-8828 西関東出張所(神奈川県厚木市)
〒243-0014 神奈川県厚木市旭町5 丁目35-1-305
九州エリア
中部営業所 TEL.0566-74-8778 FAX.0566-74-8808 九州営業所(福岡市) 東海・北陸・長野(南信)エリア
中部営業所(愛知県安城市)
〒446-0076 愛知県安城市美園町2丁目10番地1
九州営業所 TEL.092-433-0424 FAX.092-433-0426
〒812-0006 福岡県福岡市博多区上牟田1丁目8-10-101 Global Network
TEL.+81-78-991-5162 FAX.+81-78-991-8787
海外営業 〒651-2241 兵庫県神戸市西区室谷2丁目1番5号
KOSMEK LTD. 1-5, 2-chome, Murotani, Nishi-ku, Kobe-city, Hyogo, 651-2241 Japan
海外営業拠点
Europe
KOSMEK (USA) LTD. TEL. +1-630-620-7650 FAX. +1-630-620-9015
USA 650 Springer Drive, Lombard, IL 60148 USA India U.S.A.
現地法人
アメリカ合衆国 アトランタ支店 TEL. +1-708-577-3275 Asia Mexico
KOSMEK (USA) LTD. Atlanta Office 303 Perimeter Center North, Suite 300, Atlanta, GA 30346 USA
Mexico メキシコ支店 TEL. +52-1-55-3044-9983
メキシコ KOSMEK (USA) LTD. Mexico Office Av. Santa Fe 103, Int. 59, col. Santa Fe Juriquilla, Queretaro, QRO, 76230, Mexico Brazil
Australia
Europe KOSMEK EUROPE GmbH TEL. +43-463-287587 FAX. +43-463-287587-20
ヨーロッパ 現地法人 Schleppeplatz 2 9020 Klagenfurt am Wörthersee Austria
TEL.+86-21-54253000 FAX.+86-21-54253709
考世美(上海)貿易有限公司
中国上海市浦东新区浦三路21弄55号银亿滨江中心601室
KOSMEK (CHINA) LTD. 現地法人 Room601, RIVERSIDE PYRAMID No.55, Lane21, Pusan Rd, Pudong Shanghai China Korea
China TEL.+86-769-85300880
東莞事務所
広東東莞長安鎮徳政西路15号宏基本大厦301号室 China Japan
中国 考世美(上海)貿易有限公司 Room301, AcerBuilding No.15, Dezheng(W)Road, Changan Town Dongguan Guangdong 523843., P.R.China
TEL.+86-27-59822303
武漢事務所
湖北省武漢市沌口経済開発区経開未来城A棟-502室 Taiwan
考世美(上海)貿易有限公司 Room502, Building A, Jingkai Future City, Zhuankou Economic Development Zone, Wuhan City, Hubei Province, 430050 China
現地法人および営業所
India Thailand
KOSMEK LTD. - INDIA TEL. +91-9880561695 Philippines
販売店
インド 支店 4A/Old No:649, Ground Floor, 4th D cross, MM Layout, Kavalbyrasandra, RT Nagar, Bangalore -560032 India
Malaysia
Thailand タイ事務所 TEL. +66-2-300-5132 FAX. +66-2-300-5133
Singapore
タイ Thailand Representative Off ice 67 Soi 58, RAMA 9 Rd., Phatthanakan, Suanluang, Bangkok 10250, Thailand
Taiwan TEL. +886-2-82261860 FAX. +886-2-82261890 Indonesia
盈生貿易有限公司
台湾新北市中和區建八路2號 16F-4(遠東世紀廣場)
台湾 Full Life Trading Co., Ltd. 総代理店 16F-4, No.2, Jian Ba Rd., Zhonghe District, New Taipei City Taiwan 23511
Philippines G.E.T. Inc, Phil. TEL.+63-2-310-7286 FAX. +63-2-310-7286
フィリピン 総代理店 Victoria Wave Special Economic Zone Mt. Apo Building, Brgy. 186, North Caloocan City, Metro Manila, Philippines 1427
Indonesia PT. Yamata Machinery TEL. +62-21-29628607 FAX. +62-21-29628608
●記載以外の仕様および寸法については、別途お問い合わせください。
インドネシア 総代理店 Delta Commercial Park I, Jl. Kenari Raya B-08, Desa Jayamukti Kec. Cikarang Pusat Kab. Bekasi 17530 Indonesia ●このカタログの仕様は予告なしに変更することがあります。
928