



運ぶ、支える、持ち上げる。すべては働く人のために。
女性や、年配の方でも重いものを無理なく運ぶための助力装置、パワフルアームPAWシリーズ。
下方向からの助力を可能にする空気圧バランサです。
【2019グッドデザイン賞受賞】
◆詳細はカタログをダウンロードしご覧いただくか、お気軽にお問い合わせ下さい。
関連メディア
このカタログについて
| ドキュメント名 | パワフルアーム PAWシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 9.1Mb |
| 登録カテゴリ | |
| 取り扱い企業 | CKD株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
CC1418_6_H1-Sales閲覧用見
働き方は助力装置で変えられる
パワフルアーム
PAWシリーズ
POWERFUL ARM PAW SERIES
運ぶ、支える、持ち上げる
CC-1418 6
Page2
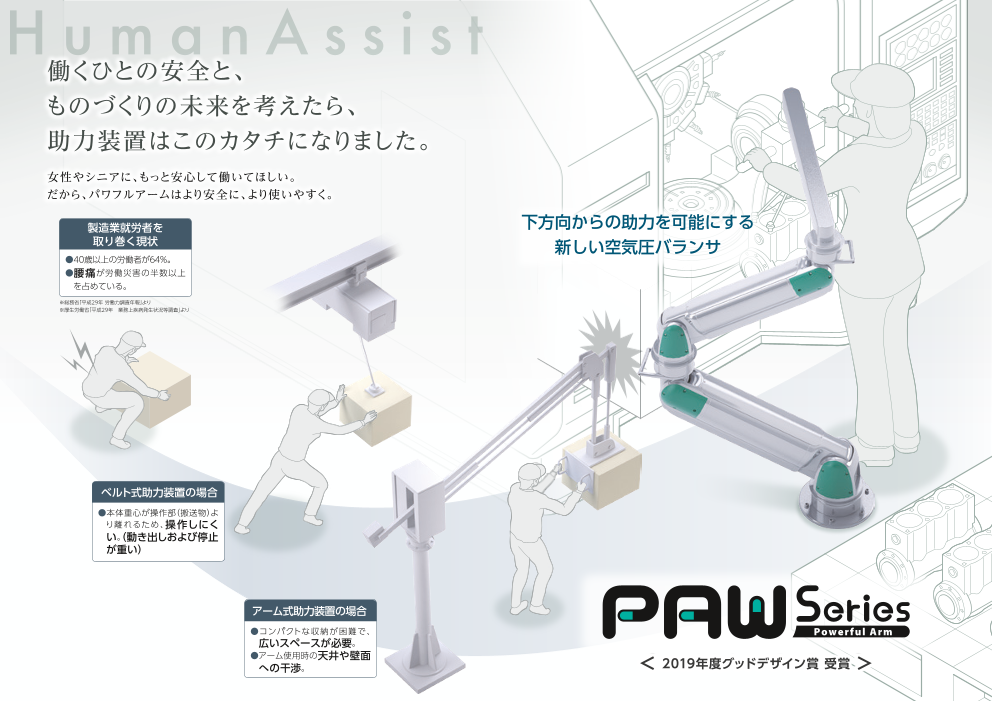
H u m a n A s s i s t
働くひとの安全と、
ものづくりの未来を考えたら、
助力装置はこのカタチになりました。
女性やシニアに、もっと安心して働いてほしい。
だから、パワフルアームはより安全に、より使いやすく。
製造業就労者を 下方向からの助力を可能にする
取り巻く現状 新しい空気圧バランサ
●40歳以上の労働者が64%。
●腰痛が労働災害の半数以上
を占めている。
※総務省「平成29年 労働力調査年報」より
※厚生労働省「平成29年 業務上疾病発生状況等調査」より
ベルト式助力装置の場合
●本体重心が操作部(搬送物)よ
り離れるため、操作しにく
い(。動き出しおよび停止
が重い)
アーム式助力装置の場合
●コンパクトな収納が困難で、
広いスペースが必要。
●アーム使用時の天井や壁面
への干渉。 < 2019年度グッドデザイン賞 受賞 >
Page3
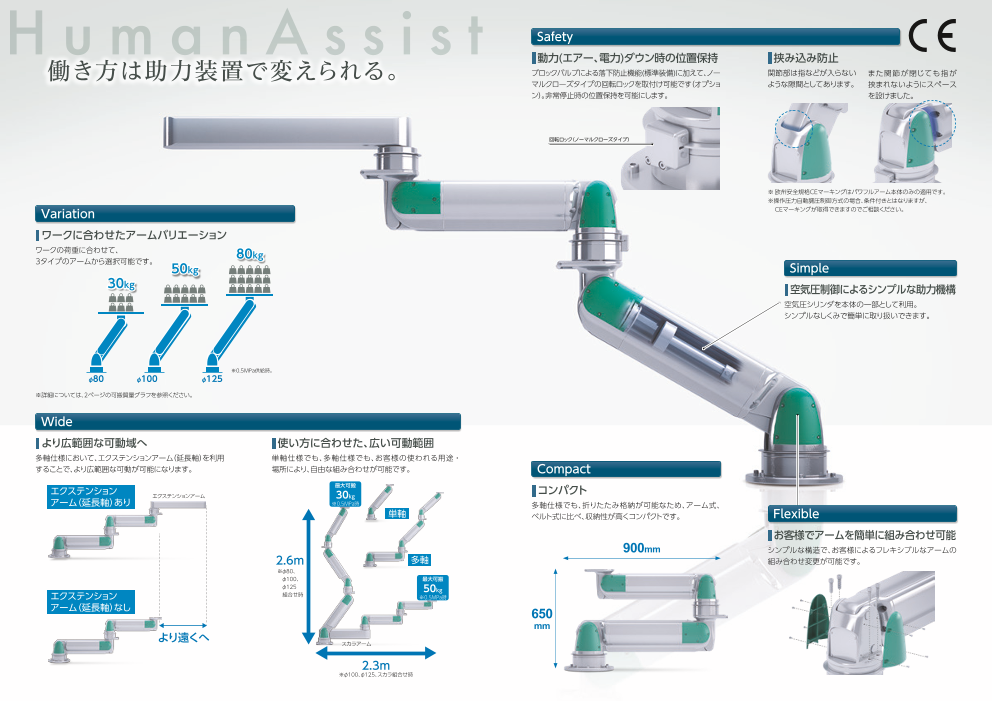
H u m a n A s s i s t Safety
働き方は助力装置で変えられる。 動力(エアー、電力)ダウン時の位置保持 挟み込み防止
ブロックバルブによる落下防止機能(標準装備)に加えて、ノー 関節部は指などが入らない また関節が閉じても指が
マルクローズタイプの回転ロックを取付け可能です(オプショ ような隙間としてあります。 挟まれないようにスペース
ン)。非常停止時の位置保持を可能にします。 を設けました。
回転ロック(ノーマルクローズタイプ)
※ 欧州安全規格CEマーキングはパワフルアーム本体のみの適用です。
※操作圧力自動調圧制御方式の場合、条件付きとはなりますが、
Variation CEマーキングが取得できますのでご相談ください。
ワークに合わせたアームバリエーション
ワークの荷重に合わせて、
3タイプのアームから選択可能です。 80kg
50kg Simple
30kg 空気圧制御によるシンプルな助力機構
空気圧シリンダを本体の一部として利用。
シンプルなしくみで簡単に取り扱いできます。
※0.5MPa供給時。
φ80 φ100 φ125
※詳細については、2ページの可搬質量グラフを参照ください。
Wide
より広範囲な可動域へ 使い方に合わせた、広い可動範囲
多軸仕様において、エクステンションアーム(延長軸)を利用 単軸仕様でも、多軸仕様でも、お客様の使われる用途・
することで、より広範囲な可動が可能になります。 場所により、自由な組み合わせが可能です。 Compact
エクステンション 最大可搬
エクステンションアーム 30 コンパクト
kg
アーム(延長軸)あり ※0.5MPa時 多軸仕様でも、折りたたみ格納が可能なため、アーム式、
単軸 ベルト式に比べ、収納性が高くコンパクトです。 Flexible
お客様でアームを簡単に組み合わせ可能
900mm シンプルな構造で、お客様によるフレキシブルなアームの
2.6m 多軸 組み合わせ変更が可能です。
※φ80、
φ100、 最大可搬
φ125 50kg
エクステンション 組合せ時 ※0.5MPa時
アーム(延長軸)なし 650
mm
より遠くへ
スカラアーム
2.3m
※φ100、φ125、スカラ組合せ時
Page4
H u m a n A s s i s t Safety
搬送作業を ロック機能内蔵で安全な構造 動力(エアー、電力)ダウン時の位置保持
ロック機構を内部に配置しており、指の挟み込みがなく ノーマルクローズタイプのロック機構のため、非常停止時
より安全に、より使いやすく 安全に使用可能です。 の位置保持が可能です。
新たにメカロック仕様をラインナップ 全ストロークで上下方向ロック可能 手動ロック解除可能
停止位置は、アームが静止していれば 緊急時は手動でのロック解除が可能です。
上下可動域どの位置でもロック可能です。 ※専用冶具を使用
Improved workability
アームの浮き上がり・沈み込みを解消
ワーク質量の変化による、アームの浮き上がりや沈み込みを解消し、作業性が向上します。
浮き上がり 沈み込み
High reliabilty
信頼性の高い円形スリット方式
シリンダで実績のある信頼性の高いロック構造です。ロックメタルに回転力Mを加えることにより、軸方向に力Fが発生し
ロッドを保持します。
ロックOFF ロックON
F
ロックメタル ロックメタル
M
ロッド ロッド
Page5
H u m a n A s s i s t Specialized Wide
省スペースで 段積み・荷下ろし作業に特化 広い可動領域
従来のパワフルアームの省スペース・コンパクト・軽い φ125単軸+垂直軸の複合機能により、より広範囲な可動
段積み・荷下ろし作業を実現する タッチはそのままに、パレタイジング工程で更に使いやす が可能になります。
くするために垂直軸を搭載いたしました。
パレタイジング仕様
φ125単軸
垂直軸
Compact Variation
省スペース収納 シンプルな組み合わせ可能
折りたたみ格納が可能です。 上下ストロークが少ない場合は、垂直軸とスカラアームを
組み合わせて使用可能です。
収納状態
Page6
H u m a n A s s i s t コントローラ設計、製造
各種助力機構に最適なエア回路を提案いたします。
助力システム対応 お客様の搬送物を最適な制御方式により簡単に搬送するこ
とが可能です。
助力機器単品だけでなく、アタッチメント、コントローラ、可動式台車を含めたご要望も検討いたします。ご相談ください。
フック コントローラ内の一例です。
お客様に合わせて検討します。
操作圧力固定制御方式 操作圧力自動調圧制御方式
治具、工具の重量を補助する用途に向いています。 重さの異なる数種類のワーク搬送に向いています。
一定の重量をバランス状態に維持する制御です。 搬送物の重量を先端部で検出し、重量変化に対応して操作
圧力を自動調圧する制御です。
吊り下げ
バキューム
検出した
重量に合わせて
自動でバランス
材料袋 板状ワーク・ガラスなど
デモンストレーション
パワフルアーム操作を実機にて体感していただけるデモンストレーションを実施しております。
台車・アンカー クランプ 出張デモンストレーションも全国で承っております。弊社営業へお問い合わせください。
内径クランプ 外側クランプ 安心の食品製造工程FPシリーズ対応※
食品用
NSF H1 このロゴマークはCKDの安全な機器が食品製造工程を
支えていくという当社の姿勢を表現しています。
グリース使用
アウトリガー付き台車 アウトリガーレス台車
※詳細は営業までお問い合わせください。
Webによるパワフルアーム紹介
パワフルアームの紹介ページをご用意しました。
※スマートフォンのご利用環境によっては、正しく表示されない場合があります。
パレット アンカー固定式 ロール材 丸物・コンテナ箱・ばんじゅう
Page7
P001-P060(Link)閲覧用見
パワフルアーム PAW Series
PAW Series 標準仕様 形番表示方法
形番表示方法
●チューブ内径:φ80・φ100・φ125 PAW M 8X R
機種形番 1 節数 3 オプション
2 組合せ内容
仕様
項 目 PAW 1 節数 1 節数
2 組合せ内容
チューブ内径 mm φ80 φ100 φ125 単軸 複数軸 3 オプション 単軸 複数軸
記号 内 容 S M 記号 内 容 S M
使用流体 圧縮空気 8 単 φ80 注1 L 回転ロック機構
最高使用圧力 MPa 0.7 X φ100 R 先端回転機構
最低使用圧力 MPa 0.25(オプションL( 回転ロック付)選択時:0.35) Z 軸 φ125 C 屈曲方向(下図を参照ください)
耐圧力 MPa 1.05 8S φ80+スカラアーム U 配管取出し方向(下図を参照ください)
周囲温度 ℃ 5~60 XS φ100+スカラアーム 注1:回転方向への力を保持する機構です。
クッション ゴムクッション ZS 複 φ125+スカラアーム 動的な回転力を止める機構ではありません。
給油 不可 8X φ80+φ100
数
可搬質量(0.5MPa加圧時) 注1 kg 32 53 83 XZ φ100+φ125
空気消費量 注2 L/min(ANR) 8 14 25 8XS 軸 φ80+φ100+スカラアーム
注1:供給圧力により可搬質量は変化します。次ページの“圧力における可搬質量”を参照してください。 XZS φ100+φ125+スカラアーム
先端回転オプションを取付けた場合の可搬質量を示しています。 8XZ φ80+φ100+φ125
注2:空気消費量は1往復/min、使用圧力0.7MPaにおける数値を示しています。
3オプション:屈曲方向 3オプション:配管取出し方向
可動範囲 無記号 C 無記号 U
2軸構成の場合 3軸構成の場合 2軸構成の場合 3軸構成の場合
・単軸使用時 ・複数軸使用時
可動範囲 可動範囲
形番 形番
上下(mm) 上下(mm) 水平(mm)
PAW-S-8(φ80) 520 PAW-M-8S 520 1200
PAW-S-X(φ100) 580 PAW-M-XS 580 1400
PAW-S-Z(φ125) 650 PAW-M-ZS 650 1600
PAW-M-8X 1100 1300 ※単軸(PAW-S)では、Cは選択できません。 ※Uでは、取付面中央部に配管用の穴が必要です。
PAW-M-XZ 1230 1500 圧力における可搬質量
PAW-M-8XS 1100 2000
PAW-M-XZS 1230 2300
120 : P1 コントローラ(PAW-B※)使用時 必要圧力
PAW-M-8XZ 1750 2100 : P2 パワフルアーム供給圧力
注:水平可動範囲は上下可動範囲の下降端における最大値になります。
可動範囲の詳細は外形寸法図を参照願います。 P1 P2
100 コントローラ PAW-S-X
PAW-S-Z PAW-M-XS
質量
PAW-M-ZS
オプション加算質量(kg)
形番 質量(kg) 80
L(回転ロック機構) R(先端回転機構) LR 可 PAW-M-XZ
PAW-S-8 27 0.5 4 5 搬
質 PAW-M-XZS
PAW-S-X 38 0.5 5.5 6.5 量( 60
PAW-S-Z 71 0.5 7.5 8.5 kg
) PAW-M-8X
PAW-M-8S 46 1 4 5.5 PAW-M-8XS
PAW-M-XS 77 1 5.5 7 40
PAW-M-ZS 123 1 7.5 9
PAW-M-8X 58 1 4 5.5 PAW-S-8
PAW-M-XZ 102 1 5.5 7 20 PAW-M-8S
PAW-M-8XS 96 1.5 4 6
PAW-M-XZS 154 1.5 5.5 7.5 PAW-M-8XZ
PAW-M-8XZ 121 1.5 4 6 0
0.2 0.3 0.4 0.5 0.6 0.7
圧力(MPa)
注1:先端回転機構オプションを取付けた場合の可搬質量を記載しています。
注2:操作頻度や操作速度によっては、コントローラへの供給圧力を増やす必要があります。
注3:アタッチメント質量は含みません。
注4:アーム上昇角度により、可搬質量が若干変化する特性がありますが、本グラフは下限値を示しています。
1 2
Page8
PAW Series PAW Series
外形寸法図(単軸)
外形寸法図(単軸) 外形寸法図(単軸)
●PAW-S-8-R(φ80単軸) ●PAW-S-Z-R(φ125単軸)
●PAW-SB-8-R(φ80単軸メカロック仕様) 4 P.C.D.52 ●PAW-SB-Z-R(φ125単軸メカロック仕様)
45° 5°
4-M8深さ16
45° 45°
4-M10深さ20 P.C.D.77
φ36+0.10 深さ6 φ56+0.1B 0 深さ6
先端回転機構Rなしの場合の上面 P点 先端回転機構Rなしの場合の上面
A
300° R B P点
160 80 R
φ260 A
4-φ12 30 φ36 0-0.1
300°
300
150
6-φ14
8-M8深さ16 φ56 0-0.1
8-M10深さ20
A φ340
60
100
記号
先端回転機構R付の寸法を示しています。 A B
形番
平面図は下降端における可動図を示しています。 PAW-S-8-R 600 300
構造上、上昇高さによって可動範囲が変化します。 A
PAW-SB-8-R 650 390
記号
A B
●PAW-S-X-R(φ100単軸) 先端回転機構R付の寸法を示しています。 形番
平面図は下降端における可動図を示しています。 PAW-S-Z-R 800 466
●PAW-SB-X-R(φ100単軸メカロック仕様) 構造上、上昇高さによって可動範囲が変化します。 PAW-SB-Z-R 850 548
-M8深さ16
45°
45 4
°
P.C.D.6
2
300° φ46+0.10 深さ6 B
P点
先端回転機構Rなしの
RA 場合の上面
160
4-φ12
8-M8深さ18
50 φ46 0-0.1
φ260
76
先端回転機構R付の寸法を示しています。 A
平面図は下降端における可動図を示しています。
構造上、上昇高さによって可動範囲が変化します。 記号
A B
形番
PAW-S-X-R 700 392
PAW-SB-X-R 750 475
※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。 ※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。
3 4
160
160
30
80
50
76
19
19
335 281
416 上下可動範囲580 5 354 上下可動範囲520 5
260
60
100
22
396
489 上下可動範囲650 5
Page9
PAW Series PAW Series
外形寸法図(複数軸)
外形寸法図(複数軸) 外形寸法図(複数軸)
●PAW-M-8S-R(上節φ80+下節スカラアーム) ●PAW-M-XS-R(上節φ100+下節スカラアーム)
●PAW-MB-8S-R(上節φ80+下節スカラアームメカロック仕様) ●PAW-MB-XS-R(上節φ100+下節スカラアームメカロック仕様)
45°
45°
4-M8深さ16 P.C.D.62
45°
45°
P.C.D.52
4-M8深さ16
RB
RB φ46+0.10 深さ6
300
160 150
φ36+0.1
先端回転機構Rなしの場合の上面
0 深さ6
6-φ14
4-φ12 先端回転機構Rなしの場合の上面
76
φ260 80
φ340 50
30
φ36 0-0.1 φ46 0-0.1
RA RA
8-M8深さ18
8-M8深さ16 拡大図
300 C 拡大図
350 C
D 水平可動範囲E
P点
D 水平可動範囲E
P点
600 A
B
700 A
記号
A B C D E B
形番
PAW-M-8S-R 600 1200 300 300 600
記号
PAW-MB-8S-R 650 1250 350 210 780 A B C D E
形番
先端回転機構R付の寸法を示しています。 先端回転機構R付の寸法を示しています。 PAW-M-XS-R 700 1400 350 308 784
平面図はP点の下降端における可動図を示しています。 平面図はP点の下降端における可動図を示しています。 PAW-MB-XS-R 750 1450 400 225 950
構造上、P点の上昇高さによって可動範囲が変化します。 構造上、P点の上昇高さによって可動範囲が変化します。
※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。 ※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。
※屈曲方向(C)オプションの場合は、可動範囲が左右反転となります。 ※屈曲方向(C)オプションの場合は、可動範囲が左右反転となります。
5 6
520
RA
19 160
449
522 上下可動範囲520 5
30
80
606
RA
22 130130
547
628 上下可動範囲580 5
50
76
Page10
PAW Series PAW Series
外形寸法図(複数軸)
外形寸法図(複数軸) 外形寸法図(複数軸)
●PAW-M-ZS-R(上節φ125+下節スカラアーム) ●PAW-M-8X-R(上節φ80+下節φ100)
●PAW-MB-ZS-R(上節φ125+下節スカラアームメカロック仕様) ●PAW-MB-8X-R(上節φ80+下節φ100メカロック仕様)
45° 45°
4-M10深さ20 45° 45°
P.C.D.77
R
C P.C.D.52
4-M8深さ16
φ56+0.10 深さ6
RB
290 先端回転機構Rなしの場合の上面 φ36+0.10 深さ6
18 160
120 8-φ φ260
先端回転機構Rなしの場合の上面
100
60 4-φ12 80
φ360
8-M10深さ20 30
φ36 0-0.1
RA
RA
φ56 0-0.1
拡大図 8-M8深さ16
拡大図
D D
400 C
100 水平可動範囲F
D 水平可動範囲E P点
P点
800 A
B
記号
A B C D E
形番
PAW-M-ZS-R 800 1600 400 334 932 B A
PAW-MB-ZS-R 850 1650 450 252 1096 C
先端回転機構R付の寸法を示しています。
平面図はP点の下降端における可動図を示しています。 記号
A B C D E F
構造上、P点の上昇高さによって可動範囲が変化します。 先端回転機構R付の寸法を示しています。 形番
平面図はP点の下降端における可動図を示しています。 PAW-M-8X-R 600 700 1300 350 606 592
構造上、P点の上昇高さによって可動範囲が変化します。 PAW-MB-8X-R 650 750 1400 375 650 765
※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。 ※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。
※屈曲方向(C)オプションの場合は、可動範囲が左右反転となります。 ※屈曲方向(C)オプションの場合は、可動範囲が左右反転となります。
7 8
693
RA
290
25 120
697
790 上下可動範囲650 5
60
100
E
RA
19
160
597
670 上下可動範囲1100 5
30
80
Page11
PAW Series PAW Series
外形寸法図(複数軸)
外形寸法図(複数軸) 外形寸法図(複数軸)
●PAW-M-XZ-R(上節φ100+下節φ125) ●PAW-M-8XS-R(上節φ80+中節φ100+下節スカラアーム)
●PAW-MB-XZ-R(上節φ100+下節φ125メカロック仕様) ●PAW-MB-8XS-R(上節φ80+中節φ100+下節スカラアームメカロック仕様)
45° 45° 45° 45°
4-M8深さ16 P.C.D.62 P.C.D.52
4-M8深さ16
R
C
RC φ36+0.10 深さ6
φ46+0.1300 0 深さ6
150
6-φ14 先端回転機構Rなしの場合の上面 先端回転機構Rなしの場合の上面
300
150
6-φ14
φ 80
φ340 76 334 30
50 φ36 0
φ46 0
-0.1
-0.1
RA
8-M8深さ16
8-M8深さ18 拡大図
拡大図
D D
E 350
100 水平可動範囲F
P点
G 水平可動範囲H
P点
700 B A
C
B A
C
先端回転機構R付の寸法を示しています。 記号
記号 A B C D E F G H
先端回転機構R付の寸法を示しています。 A B C D E F 平面図はP点の下降端における可動図を示しています。 形番
形番 構造上、P点の上昇高さによって可動範囲が変化します。 PAW-M-8XS-R 600 700 2000 1300 700 1212 608 784
平面図はP点の下降端における可動図を示しています。 PAW-M-XZ-R 700 800 1500 400 693 758 PAW-MB-8XS-R 650 750 2100 1400 725 1256 614 951
構造上、P点の上昇高さによって可動範囲が変化します。 PAW-MB-XZ-R 750 850 1600 425 736 923
※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。 ※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。
※屈曲方向(C)オプションの場合は、可動範囲が左右反転となります。 ※屈曲方向(C)オプションの場合は、可動範囲が左右反転となります。
9 10
E
RA
22
260
712
793 上下可動範囲1230 5
50
76
F
606
RA
22 130 130
809
882 上下可動範囲1100 5
30
80
RD
R60
0
Page12
PAW Series PAW Series
外形寸法図(複数軸)
外形寸法図(複数軸) 外形寸法図(複数軸)
●PAW-M-XZS-R(上節φ100+中節φ125+下節スカラアーム) ●PAW-M-8XZ-R(上節φ80+中節φ100+下節φ125)
●PAW-MB-XZS-R(上節φ100+中節φ125+下節スカラアームメカロック仕様) ●PAW-MB-8XZ-R(上節φ80+中節φ100+下節φ125メカロック仕様)
45° 45°
45°
45°
4-M8深さ16 P.C.D.52
4-M8深さ16 P.C.D.62
+
φ46+0.1
φ36 0.1
0 深さ6
0 深さ6
先端回転機構Rなしの場合の上面
先端回転機構Rなしの場合の上面
RD
300
290 RC 150
120 6-φ14
8-φ18
76 80
φ340 R7
50 0 30
0
φ360 φ46 0-0.1 φ36 0-0.1
8-M8深さ18
拡大図
拡大図 8-M8深さ16
F G
E 400 J 水平可動範囲K
P点
G 水平可動範囲H
800 B A
C 先端回転機構R付の寸法を示して C B A
記号 います。 D
A B C D E F G H
形番 平面図はP点の下降端における
先端回転機構R付の寸法を示しています。 記号
可動図を示しています。
平面図はP点の下降端における可動図を示しています。 形番 A B C D E F G H I J K
PAW-M-XZS-R 700 800 2300 1500 800 1386 726 932
構造上、P点の上昇高さによって可動範囲が変化します。 構造上、P点の上昇高さによって
PAW-MB-XZS-R 750 850 2400 1600 825 1429 727 1096 PAW-M-8XZ-R 600 700 800 2100 1300 750 400 693 1299 700 458
可動範囲が変化します。 PAW-MB-8XZ-R 650 750 850 2250 1400 774 425 736 1386 750 663
※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。 ※先端回転機構(R)オプション外形寸法図については、15ページを参照してください。
※屈曲方向(C)オプションの場合は、可動範囲が左右反転となります。 ※屈曲方向(C)オプションの場合は、可動範囲が左右反転となります。
11 12
F
693
RA
290
25 120
1013
1094 上下可動範囲1230 5
50
76
I
H
RA
22 260
974
1047 上下可動範囲1750
30
80
RE
R
D
R700
Page13
パワフルアーム メカロック仕様 PAW-※B Series
PAW-※B Seriesメカロック仕様 形番表示方法
形番表示方法
●チューブ内径:φ80・φ100・φ125 PAW MB 8X R
機種形番 1 節数 3 オプション
2 組合せ内容
仕様
項 目 PAW メカロック付 1 節数 1 節数
2 組合せ内容 単軸 複数軸 3 オプション
チューブ内径 mm φ80 φ100 φ125 単軸 複数軸
記号 内 容 SB MB 記号 内 容 SB MB
使用流体 圧縮空気 8 単 φ80 注1 L 回転ロック機構
最高使用圧力 MPa 0.7 X φ100 R 先端回転機構
最低使用圧力 MPa 0.25(オプションL( 回転ロック付)選択時:0.35) Z 軸 φ125 C 屈曲方向(下図を参照ください)
ロック解除圧力 MPa 0.5 8S φ80+スカラアーム U 配管取出し方向(下図を参照ください)
耐圧力 MPa 1.05 XS φ100+スカラアーム 注1:回転方向への力を保持する機構です。
周囲温度 ℃ 5~60 ZS 複 φ125+スカラアーム 動的な回転力を止める機構ではありません。
クッション ゴムクッション 8X φ80+φ100
数
給油 不可 XZ φ100+φ125
可搬質量(0.5MPa加圧時) 注1 kg 27 45 71 8XS 軸 φ80+φ100+スカラアーム
空気消費量 注2 L/min(ANR) 8 14 25 XZS φ100+φ125+スカラアーム
騒音値 注3 dB(A) 85未満 8XZ φ80+φ100+φ125
注1:供給圧力により可搬質量は変化します。次ページの“圧力における可搬質量”を参照してください。 3オプション:屈曲方向 3オプション:配管取出し方向
先端回転オプションを取付けた場合の可搬質量を示しています。
注2:空気消費量は1往復/min、使用圧力0.7MPaにおける数値を示しています。 無記号 C 無記号 U
注3:メカロック解除時に音が発生します。騒音値はロック解除作動2回/min、使用圧力0.7MPa、1.0mでの等価騒音レベルです。 2軸構成の場合 3軸構成の場合 2軸構成の場合 3軸構成の場合
可動範囲
・単軸使用時 ・複数軸使用時
可動範囲 可動範囲
形番 形番
上下(mm) 上下(mm) 水平(mm)
PAW-SB-8(φ80) 520 PAW-MB-8S 520 1250
※単軸(PAW-S)では、Cは選択できません。 ※Uでは、取付面中央部に配管用の穴が必要です。
PAW-SB-X(φ100) 580 PAW-MB-XS 580 1450
PAW-SB-Z(φ125) 650 PAW-MB-ZS 650 1650 圧力における可搬質量
PAW-MB-8X 1100 1400 120
PAW-MB-XZ 1230 1600 : P1 コントローラ(PAW-B※)使用時 必要圧力
PAW-MB-8XS 1100 2100 : P2 パワフルアーム シリンダ室供給圧力
PAW-MB-XZS 1230 2400
100 ロック解除圧力
PAW-MB-8XZ 1750 2250 P1 P2 0.5MPa
コントローラ
注:水平可動範囲は上下可動範囲の下降端における最大値になります。 PAW-SB-Z
可動範囲の詳細は外形寸法図を参照願います。 PAW-MB-ZS PAW-SB-X
質量 80 PAW-MB-XS
オプション加算質量(kg)
形番 質量(kg) 可 PAW-MB-XZ
L(回転ロック機構) R(先端回転機構) LR 搬 PAW-MB-XZS
PAW-SB-8 28 0.5 4 5 質 60
量
PAW-SB-X 42 0.5 5.5 6.5 (
kg
PAW-SB-Z 76 0.5 7.5 8.5 ) PAW-MB-8X
PAW-MB-8XS
PAW-MB-8S 47 1 4 5.5 40
PAW-MB-XS 81 1 5.5 7
PAW-MB-ZS 128 1 7.5 9
PAW-MB-8X 62 1 4 5.5 PAW-SB-8
20
PAW-MB-XZ 110 1 5.5 7 PAW-MB-8S
PAW-MB-8XS 101 1.5 4 6 PAW-MB-8XZ
PAW-MB-XZS 162 1.5 5.5 7.5
0
PAW-MB-8XZ 130 1.5 4 6 0.2 0.3 0.4 0.5 0.6 0.7
圧力(MPa)
外形寸法図 注1:先端回転機構オプションを取付けた場合の可搬質量を記載しています。
注2:操作頻度や操作速度によっては、コントローラへの供給圧力を増やす必要があります。
注3:アタッチメント質量は含みません。
3~12、15ページをご参照ください。 注4:アーム上昇角度により、可搬質量が若干変化する特性がありますが、本グラフは下限値を示しています。
13 14
Page14
PAW Series PAW Series
ユニット単品形番について
オプション外形寸法図 ユニット単品形番について
●先端回転機構(R) パワフルアームユニット 回転ユニット
・PAW-[S,SB]-8-R ・PAW-[S,SB]-X-R PAW-AU-( ) PAW-RU-( )
PAW-[M,MB]-8S-R PAW-[M,MB]-XS-R 8 φ80標準仕様 T AU-8先端部
PAW-[M,MB]-8X-R PAW-[M,MB]-XZ-R X φ100標準仕様 8 AU-8根本部/AU-X先端部
PAW-[M,MB]-8XS-R PAW-[M,MB]-XZS-Rの場合
PAW-[M,MB]-8XZ-Rの場合 Z φ125標準仕様 X AU-X根本部/AU-Z先端部
76 8-B φ80メカロック仕様 Z AU-Z根本部
80 50 X-B φ100メカロック仕様 ZS SU-Z根本部
30 Z-B φ125メカロック仕様
8-M8深さ18
ベースプレート
8-M8深さ16
スカラアームユニット PAW-BP-( )
PAW-SU-( ) 8 AU-8根本部(RU-8に組付)
8S AU-8用(AU-8の下部) X AU-X根本部(RU-Xに組付)
XS AU-X用(AU-Xの下部) Z AU-Z根本部(RU-Zに組付)
ZS AU-Z用(AU-Zの下部) ZS SU-Z根本部(RU-ZSに組付)
回転ロックユニット
φ156 φ176 PAW-LU
φ120 φ140 …各回転ユニット共通(回転ユニット1箇所あたり、1ユニット必要です)
φ36 0-0.1 φ46 0 ※PAW-LUはパワフルアーム専用部品です。他の目的には使用できません。
-0.1
例:PAW-M-XZS-Rを構成する場合
PAW-RU-8
PAW-AU-X
・PAW-[S,SB]-Z-R
PAW-[M,MB]-ZS-Rの場合
100 PAW-RU-X
60
8-M10深さ20
PAW-AU-Z
PAW-RU-Z
φ206
PAW-SU-ZS
φ170
φ56 0-0.1
PAW-RU-ZS
PAW-BP-ZS
・組付方法、配管方法については取扱説明書をご参照ください。エアチューブは別途準備が必要です。
・各ユニットには締結用のボルト・ワッシャが添付されます。
15 16
100
60
93 5 80
73 5 30
76
50
81 5
Page15
PAW Series PAW Series
エクステンションアームについて
アンカー施工について エクステンションアームについて
より広い可動範囲の確保が必要な場合やワークを吊り下げて搬送する場合には、アーム上部へエクステンション
アームを装着することができます。
アタッチメント設計時には、19ページを参照いただき許容モーメント以下になるようご注意ください。
例:PAW-M-XZ(上節φ100+下節φ125)にエクステンションアームを装着した場合の可動範囲
R2500
45° 45° 4-M8深さ12
φ36
・既存のコンクリート床(床には鉄筋(φ6以上)が入っていること)に据え付ける場合はケミカルアンカー(日本デコラッ P.C.D.52
クス社製)を使用してください。 300 先端回転機構なしの場合の下面
・ケミカルアンカー種類、アンカー筋寸法、本数、敷設寸法は下表、下図を参照してください。施工方法(穿孔方法)につ 150 または上面(選択可)
6-φ14
いてはケミカルアンカーの取扱説明書に準じてください。 φ340 80
30
製品形番 ケミカルアンカー R φ36 0
1 -0.1
種類 アンカー筋寸法 本数 050
① PAW-[S,SB]-8,PAW-[S,SB]-X R-10N W3/8''
PAW-[M,MB]-8X,PAW-[M,MB]-8S またはR-10LN またはM10 4
PAW-[S,SB]-Z,PAW-[M,MB]-XZ
② PAW-[M,MB]-8XZ,PAW-[M,MB]-XS R-12N W1/2'' 8-M8深さ16
PAW-[M,MB]-8XS またはR-12LN またはM12 6 下面拡大図
(先端回転機構を上側へ取り付けた
③ PAW-[M,MB]-ZS R-16N W5/8'' 場合は上面拡大図)
PAW-[M,MB]-XZS またはR-16LN またはM16 8
敷設寸法
② ③
750 400
290
300 エクステンションアーム
① 120 水平可動範囲
150 1100 758
160
P点
回転可動範囲 回転可動範囲 回転可動範囲
先端回転機構R付の寸法を示しています。 先端回転機構は上側への
平面図はP点の下降端における可動図を 取付も可能
示しています。
構造上、P点の上昇高さによって可動範囲が
変化します。
・架台、台車等に取り付ける場合は強度区分10.8もしくは12.9のボルトを使用し、1.5D以上のねじ込み深さを確保してください。
・製品を据付ける場合は、取付面の水平レベルを正確に出してください。レベルが出ていないとアーム先端部の傾き、アームの 800 700 1000(注) 注)長さ1000は
流れ等により位置が保持できない恐れがあります。 2500 例の長さ。変更可能
・設置は専門業者にて施工お願いいたします。
詳細については当社営業へお問い合わせください。
17 18
160
130 130
120
290
1299
693
R1000
22 260
73
715 上下可動範囲1230 5
893
971
30
80
0
70
R1
Page16
PAW Series PAW Series
技術資料
モーメント荷重について モーメント荷重について
【上下可動アームが単軸の場合】 ■標準仕様 【上下可動アームが3軸の場合】
L 形番 M1(N・m)
エクステンションアーム L L
L/2 PAW-S-8 350
L1
PAW-S-X 550 Y X L1
M1 アタッチメント・ M1
操作BOX PAW-S-Z 900 Y/2 X/2
PAW-M-8S 350 上節
m2 m1 W PAW-M-XS 550 m1 W
PAW-M-ZS 900 上節 m4
m3 M1
m1+W ■メカロック仕様 下節
エクステンションアームを取付ける場合 アタッチメントがオフセットしている場合 形番 M1(N・m) m6
m5 M2
M1=(m1+W)×L+m2×L/2 M1=m1×L1+W×L PAW-SB-8 300
PAW-SB-X 500
m1:アタッチメント・操作BOX質量 m1:アタッチメント・操作BOX質量 PAW-SB-Z 850 M3
m2:エクステンションアーム質量 W:ワーク質量 PAW-MB-8S 300
W:ワーク質量 L1:パワフルアーム取付部から PAW-MB-XS 500 アタッチメントがオフセットしている場合
L:パワフルアーム取付部から アタッチメント・操作BOX重心まで PAW-MB-ZS 850 ①上節にかかるモーメント
アタッチメント・ワーク重心までの距離 の距離 ※モーメント荷重が表以下になるよう M1=m1×L1+W×L
L:パワフルアーム取付部から ワーク・アタッチメント・エクステ
②中節にかかるモーメント
ワーク重心までの距離 ンションアームを設計してください
※可動アーム部のみ算出してください M2=W×(L+X)+m1×(L1+X)+m3×X/2+m4×X
【上下可動アームが2軸の場合】 ③下節にかかるモーメント
L L M3=W×(L+X+Y)+m1×(L1+X+Y)+m3×(X/2+Y)+m4×(X+Y)+m5×Y/2+m6×Y
X L/2 X L1
上節 m1:アタッチメント・操作BOX質量
X/2 上節 X/2 m3:パワフルアーム質量 PAW-AU-8:14kg PAW-AU-8-B:15kg
m4:回転ユニット質量 PAW-RU-T:4kg
下節 m2 下節 m1 W
m5:パワフルアーム質量 PAW-AU-X:23kg PAW-AU-X-B:27kg
m4 m4
m3 m6:回転ユニット質量 PAW-RU-8:6kg
M1 m3 M1
W:ワーク質量
m1+W
M2 M2 L1:パワフルアーム取付部からアタッチメント・操作BOX重心までの距離
L:パワフルアーム取付部からワーク重心までの距離
エクステンションアームを取付ける場合 アタッチメントがオフセットしている場合 X:パワフルアーム長さ PAW-AU-8:600㎜ PAW-AU-8-B:650㎜
①上節にかかるモーメント ①上節にかかるモーメント Y:パワフルアーム長さ PAW-AU-X:700㎜ PAW-AU-X-B:750㎜
M1=(m1+W)×L+m2×L/2 M1=m1×L1+W×L
②下節にかかるモーメント ②下節にかかるモーメント
M2=(m1+W)×(L+X)+m2×(L/2+X) M2=W×(L+X)+m1×(L1+X)+m3×X/2 ■標準仕様 ■メカロック仕様
+m3×X/2+m4×X +m4×X 形番 上節 中節 下節
M1(N・m) 2(N・m) M3(N・m) 形番 上節 中節 下節
M M1(N・m) M2(N・m) M3(N・m)
m1:アタッチメント・操作BOX質量 m1:アタッチメント・操作BOX質量 PAW-M-8XZ 350 550 900 PAW-MB-8XZ 300 500 850
m2:エクステンションアーム質量 m3:パワフルアーム質量 ※モーメント荷重が表以下になるようワーク・アタッチメント・エクステンションアームを設計してください
m3:パワフルアーム質量 PAW-AU-8:14kg PAW-AU-8-B:15kg ※可動アーム部のみ算出してください
PAW-AU-8:14kg PAW-AU-8-B:15kg PAW-AU-X:23kg PAW-AU-X-B:27kg
PAW-AU-X:23kg PAW-AU-X-B:27kg PAW-AU-Z:42kg PAW-AU-Z-B:47kg
PAW-AU-Z:42kg PAW-AU-Z-B:47kg m4:回転ユニット質量
m4:回転ユニット質量 PAW-RU-T:4kg PAW-RU-8:6kg
PAW-RU-T:4kg PAW-RU-8:6kg PAW-RU-X:8kg
PAW-RU-X:8kg W:ワーク質量
W:ワーク質量 L1:パワフルアーム取付部から
L:パワフルアーム取付部から アタッチメント・操作BOX重心までの距離
アタッチメント・ワーク重心までの距離 L:パワフルアーム取付部から
X:パワフルアーム長さ ワーク重心までの距離
PAW-AU-8:600㎜ PAW-AU-8-B:650㎜ X:パワフルアーム長さ
PAW-AU-X:700㎜ PAW-AU-X-B:750㎜ PAW-AU-8:600㎜ PAW-AU-8-B:650㎜
■標準仕様 ■メカロック仕様 PAW-AU-X:700㎜ PAW-AU-X-B:750㎜
形番 上節 下節 節 下節
M1(N・m) M2(N・m) 形番 上
M1(N・m) M2(N・m)
PAW-M-8X 350 550 PAW-MB-8X 300 500
PAW-M-XZ 550 900 PAW-MB-XZ 500 850
PAW-M-8XS 350 550 PAW-MB-8XS 300 500
PAW-M-XZS 550 900 PAW-MB-XZS 500 850
※モーメント荷重が表以下になるようワーク・アタッチメント・エクステンションアームを設計してください
※可動アーム部のみ算出してください
19 20
Page17
パレタイジング仕様
PAW-A※ パレタイジング仕様PAW-A Series
Series 圧力における可搬質量
圧力における可搬質量
PAW-AS-45-S
80 : P1 コントローラ(PAW-B※)使用時 必要圧力 PAW-AZ-110-S
: P2 パワフルアーム供給圧力
70 P1 P2
コントローラ
仕様 60
項目 PAW-AS-45 PAW-AS-45-S PAW-AZ-110 PAW-AZ-110-S PAW-AS-45
PAW-AS-45-S PAW-AS-45
使用流体 圧縮空気 PAW-AZ-1
可 50 10
最高使用圧力 MPa 0.7
搬
最低使用圧力 MPa 0.25(オプションL(回転ロック付)選択時:0.35) 質
耐圧力 MPa 1.05 量( 40
周囲温度 ℃ 5~60 kg
)
給油 不可 30
可搬質量(0.5MPa加圧時)注1 kg 55 55 48 51 PAW-AZ-110
コントローラ(PAW-B※)使用時 49 49 37 40 20
空気消費量 注2 L/min(ANR) 11 35
製品質量 注3 kg 164 161 183 180 PAW-AZ-110-S
搬部上下可動範囲 mm 450 1100 10
搬部最大可動半径 mm 2000 1600 2100 1700
注1:供給圧力により可搬質量は変化します。次ページの“圧力における可搬質量”を参照してください。 0
オフセット使用時の可搬質量については28ページを参照してください。 0.2 0.3 0.4 0.5 0.6 0.7
注2:空気消費量は1往復/min、使用圧力0.7MPaにおける数値を示しています。 圧力(MPa)
注3:オプションL(回転ロック付)選択時は、それぞれ2kg追加されます。
形番表示方法 注1:操作頻度や操作速度によっては、コントローラへの供給圧力を増やす必要があります。
注2:可搬質量は「ワーク、アタッチメント、操作ボックス」質量の合算です。
PAW AS-45 L
機種形番 2 オプション
〈選択例1〉 〈選択例2〉
1 上下操作範囲/ 機種:PAW-AS-45-S コントローラ:PAW-BH1 機種:PAW-AZ-110 コントローラ:PAW-BS2
最大回転半径 ワーク質量:40kg、操作ボックス質量:9kg、 操作ボックス質量:9kg、フックアタッチメント質量:2kg
段ボール吸着アタッチメント質量:11kg 合計60kgの場合 コントローラへの供給圧力0.56MPaの場合
1 上下操作範囲/最大回転半径 2 オプション
記 号 内 容 記号 内 容 80 80
上下操作範囲 最大回転半径 L 回転ロック機構
AS-45 450mm 2,000mm 注1 C 屈曲方向(下図を参照ください) 70 70
AS-45-S 450mm 1,600mm 注1:回転方向への力を保持する機構です。
AZ-110 1,100mm 2,100mm 動的な回転力を止める機構ではありません。 60 60kg 60
AZ-110-S 1,100mm 1,700mm 可 可
搬50 搬50 51kg
注1:上下操作範囲/最大回転半径を超える場合は、 質 質
当社営業までご相談ください。 量(40 量(40
2オプション:屈曲方向 kg kg
)30 )30
PAW-AS-45,PAW-AZ-110のみ選択可能 ※PAW-AS-45-S,PAW-AZ-110-Sの屈曲方向 20 20
無記号 C 無記号(Cの選択不可) 0.58MPa 0.56MPa
10 10
0 0
0.2 0.3 0.4 0.5 0.6 0.7 0.1 0.2 0.3 0.4 0.5 0.6 0.7
圧力(MPa) 圧力(MPa)
コントローラへの供給圧力は0.58MPa必要となります。 可搬質量51kgから、操作ボックス質量9kgとフックアタッチメント
質量2kgを引いて40kgまでのワーク質量の搬送が可能となります。
21 22
Page18
パレタイジング仕様PAW-A Series パレタイジング仕様PAW-A Series
外形寸法図
外形寸法図 外形寸法図
●PAW-AS-45(上下操作範囲:450mm/最大回転半径:2000mm) ●PAW-AS-45-S(上下操作範囲:450mm/最大回転半径:1600mm)
00
0
R1
60
0
R2
R457
R900
R1300
操作範囲平面図
回転部A、回転部Bともに、回転角度規
制無し(300°)の場合の操作範囲を示
操作範囲平面図 しています。
回転部Aを回転角度180°に規制
収納ポジション 回転部Bを回転角度規制無し(300°) 収納ポジション
の場合の操作範囲を示しています。
※屈曲方向(C)オプションの場合は、 700 900 130
操作範囲が左右反転となります。
700 1300 130
φ36 0-0.2
φ36 0-0.2 回転部B
回転部A
回転部A 回転部B
30 8-M8深さ16
30 8-M8深さ16
80
80
搬部取付面寸法
搬部取付面寸法
搬部取付面
6-φ14 6-φ14
搬部取付面
台座取付面 457 水平操作範囲1143
台座取付面 600 水平操作範囲1400
台座(受注生産品)
130 130 台座(受注生産品) 130 130
台座取付面寸法 台座取付面寸法
23 24
150 30 5
300 80
21
R600
1200
1331
193
上下操作範囲
231 450
1624
150 30 5
300 80
21
1200
1331
193
上下操作範囲
231 450
1624
Page19
パレタイジング仕様PAW-A Series パレタイジング仕様PAW-A Series
外形寸法図
外形寸法図 外形寸法図
●PAW-AZ-110(上下操作範囲:1100mm/最大回転半径:2100mm) ●PAW-AZ-110-S(上下操作範囲:1100mm/最大回転半径:1700mm)
R2
10
0
R1
70
0
R450
R900
R1300
操作範囲平面図
回転部A、回転部Bともに、回転角度規
操作範囲平面図 制無し(300°)の場合の操作範囲を示
回転部Aを回転角度180°に規制 しています。
回転部Bを回転角度規制無し(300°) は上昇端の操作範囲
の場合の操作範囲を示しています。 は下降端の操作範囲を示して
は上昇端の操作範囲 収納ポジション います。
は下降端の操作範囲
※屈曲方向(C)オプションの場合は、
収納ポジション 操作範囲が左右反転となります。
回転部A
800 900 130
φ36 0-0.2
回転部A
800 1300 130
φ36 0-0.2
回転部B
30 8-M8深さ16
80
回転部B
30 8-M8深さ16 搬部取付面寸法
80
搬部取付面寸法 6-φ14
搬部取付面
6-φ14 搬部取付面
130 130
台座取付面 500 水平操作範囲1600 台座取付面 450 水平操作範囲1250
台座取付面寸法
130 130 台座(受注生産品) 台座(受注生産品)
台座取付面寸法
25 26
150 30 5
300 80
21
R50
1200 0
1347
342
396 上下操作範囲1100
1789
2439
150 30 5
300 80
21
1200
1347
342
396 上下操作範囲1100
1789
2439
Page20
パレタイジング仕様PAW-A Series パレタイジング仕様PAW-A Series
オフセット使用時の可搬質量
台座(受注生産品)のコンクリート床への据え付け、アンカー施工について オフセット使用時の可搬質量
操作ボックス
アタッチメント
枠内の総質量 M
m1
L1 m2
L2 ワーク
W
枠内総質量の重心位置
・既存のコンクリート床(鉄筋(φ6以上)が入っていること)に据え付ける場合はケミカルアンカー(日本デコラックス L3 m3
製)を使用してください。 オフセット量 L
・ケミカルアンカー種類、アンカー筋寸法、本数、敷設寸法は下表、下図を参照してください。ケミカルアンカーの施工
方法(穿孔方法)については、ケミカルアンカー取扱説明書に準じてください。
ケミカルアンカー種類 アンカー筋寸法 本数 ※総質量:M=操作ボックス質量:m1+アタッチメント質量:m2+ワーク質量:m3
R-16NまたはR-16LN W5/8''またはM16 8 m1×L1+m2×L2+m3×L3
L=
M
敷設寸法
400
200 PAW-AS-45-S
8-φ18 80
PAW-AZ-110-S
70
PAW-AS-45
60
総
質 50
量
M
(
kg PAW-AZ-110
40
)
30
20
10
0 200 400 600 800 1000
・製品を据え付ける場合は、取付面の水平レベルを正確に出してください。レベルが出ていないと傾きにより水平方向の位 オフセット量 L( mm)
置が保持できない恐れがあります(回転ロック機構不使用時)。
・設置は専門業者にて施工をお願いいたします。
・台車への取り付けには、専用の台座を用意しております(特別仕様品)。台車(35ページ)は、PAW-C※-Hから選定してく
ださい。
27 28
200
400