


思いのままのモータ制御を実現する「PMC-Rシリーズ」
コスモテックスが開発したモータコントロールLSIの機能についての紹介と、
プログラマブルモータコントロールLSI「PMC-Rシリーズ」の仕様について
このカタログについて
| ドキュメント名 | プログラマブルモータコントロールLSI「PMC-Rシリーズ」 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 579.1Kb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社コスモテックス (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
MOTOR CONTROLLER
LSI PMC-R Series
PMC620R / PMC820SR / PMC842SR
LSI プログラマブルモータコントロールLSI
PMC-R シリーズ
Large Scale Integration
モータコントロールLSI Motor control LSI
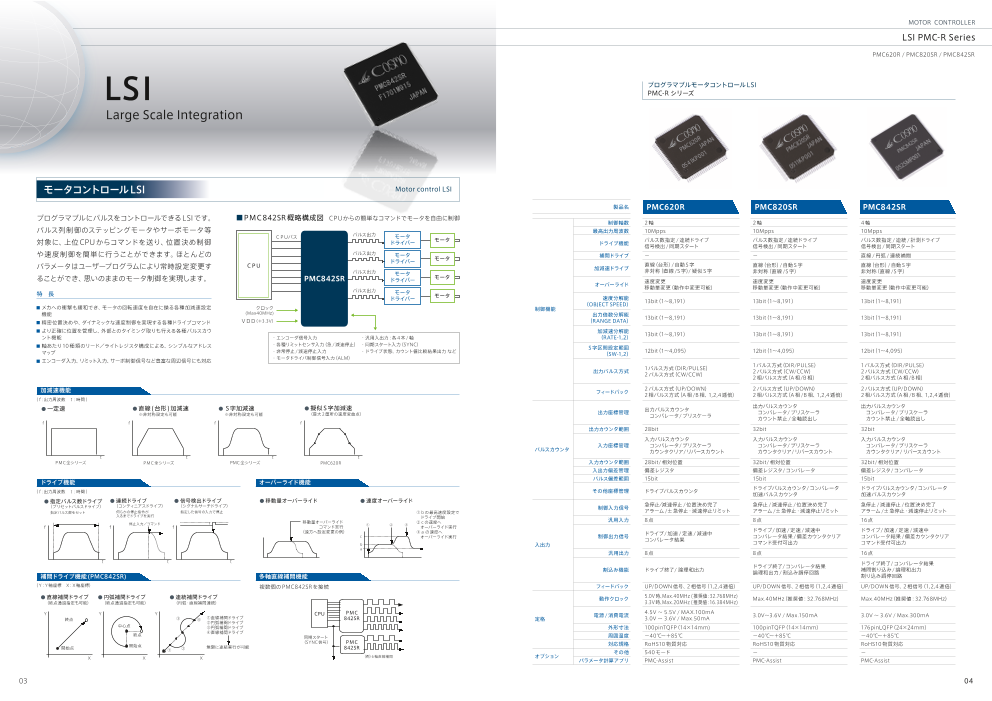
製品名 PMC620R PMC820SR PMC842SR
プログラマブルにパルスをコントロールできるLSIです。 ■PMC842SR概略構成図 CPUからの簡単なコマンドでモータを自由に制御
制御軸数 2軸 2軸 4軸
パルス列制御のステッピングモータやサーボモータ等 最高出力周波数 10Mpps 10Mpps 10Mpps
CPUバス パルス出力 モータ
対象に、上位CPUからコマンドを送り、位置決め制御 ドライバー モータ ドライブ機能 パルス数指定/連続ドライブ パルス数指定/連続ドライブ パルス数指定/連続/計測ドライブ
信号検出/同期スタート 信号検出/同期スタート 信号検出/同期スタート
や速度制御を簡単に行うことができます。ほとんどの パルス出力 モータ
ドライバー モータ 補間ドライブ - - 直線/円弧/連続補間
パラメータはユーザープログラムにより常時設定変更す CPU 直線(台形)/自動S字
加減速ドライブ 直線(台形)/自動S字 直線(台形)/自動S字
パルス出力 モータ 非対称(直線/S字) / 疑似S字 非対称(直線/S字) 非対称(直線/S字)
ることができ、思いのままのモータ制御を実現します。 PMC842SR ドライバー モータ
オーバーライド 速度変更 速度変更 速度変更
パルス出力 移動量変更(動作中変更可能) 移動量変更(動作中変更可能) 移動量変更(動作中変更可能)
特 長 モータ
ドライバー モータ 速度分解能
メカへの衝撃も緩和でき、モータの回転速度を自在に操る各種加減速設定 (OBJECT SPEED) 13bi(t 1~8,191) 13bi(t 1~8,191) 13bi(t 1~8,191)
■ クロック 制御機能
機能 (Max40MHz) 出力倍数分解能 13bi(t 1~8,191) 13bi(t 1~8,191) 13bi(t 1~8,191)
■精密位置決めや、ダイナミックな速度制御を実現する各種ドライブコマンド VDD(+3.3V) (RANGE DATA)
■より正確に位置を管理し、外部とのタイミング取りも行える各種パルスカウ 加減速分解能
ント機能 ・ エンコーダ信号入力 ・ 汎用入出力:各4本/軸 (RATE-1,2) 13bi(t 1~8,191) 13bi(t 1~8,191) 13bi(t 1~8,191)
■軸あたり10種類のリード/ライトレジスタ構成による、シンプルなアドレス ・ 各種リミットセンサ入力(急/減速停止) ・ 同期スタート入力(SYNC) S字区間設定範囲
マップ ・ 非常停止/減速停止入力 ・ ドライブ状態、カウント値比較結果出力 など (SW-1,2) 12bi(t 1~4,095) 12bi(t 1~4,095) 12bi(t 1~4,095)
・ モータドライバ制御信号入力(ALM)
■エンコーダ入力、リミット入力、サーボ制御信号など豊富な周辺信号にも対応
1パルス方式(DIR/PULSE) 1パルス方式(DIR/PULSE) 1パルス方式(DIR/PULSE)
出力パルス方式 2パルス方式(CW/CCW) 2パルス方式(CW/CCW) 2パルス方式(CW/CCW)
2相パルス方式(A相/B相) 2相パルス方式(A相/B相)
加減速機能 フィードバック 2パルス方式(UP/DOWN) 2パルス方式(UP/DOWN) 2パルス方式(UP/DOWN)
2相パルス方式(A相/B相、1,2,4逓倍) 2相パルス方式(A相/B相、1,2,4逓倍) 2相パルス方式(A相/B相、1,2,4逓倍)
( f:出力周波数 t:時間 )
● 一定速 ● 直線(台形)加減速 ● S字加減速 ● 擬似S字加減速 出力パルスカウンタ 出力パルスカウンタ
※非対称設定も可能 ※非対称設定も可能 (最大2箇所の速度変曲点) 出力座標管理 出力パルスカウンタ コンパレータ/プリスケーラ コンパレータ/プリスケーラ
コンパレータ/プリスケーラ カウント禁止/全軸読出し カウント禁止/全軸読出し
f f f f
出力カウンタ範囲 28bit 32bit 32bit
入力パルスカウンタ 入力パルスカウンタ 入力パルスカウンタ
入力座標管理 コンパレータ/プリスケーラ コンパレータ/プリスケーラ コンパレータ/プリスケーラ
パルスカウンタ カウンタクリア/リバースカウント カウンタクリア/リバースカウント カウンタクリア/リバースカウント
t t t t
PMC全シリーズ PMC全シリーズ PMC全シリーズ PMC620R 入力カウンタ範囲 28bit/相対位置 32bit/相対位置 32bit/相対位置
入出力偏差管理 偏差レジスタ 偏差レジスタ/コンパレータ 偏差レジスタ/コンパレータ
ドライブ機能 オーバーライド機能 パルス偏差範囲 15bit 15bit 15bit
( f:出力周波数 t:時間 ) その他座標管理 ドライブパルスカウンタ ドライブパルスカウンタ/コンパレータ ドライブパルスカウンタ/コンパレータ
加速パルスカウンタ 加速パルスカウンタ
● 指定パルス数ドライブ ● 連続ドライブ ● 信号検出ドライブ ● 移動量オーバーライド ● 速度オーバーライド
(プリセットパルスドライブ) (コンティニアスドライブ) (シグナルサーチドライブ) 制御入力信号 急停止 ⁄減速停止/位置決め完了 急停止/減速停止/位置決め完了 急停止/減速停止/位置決め完了
指定パルス数をセット 何らかの停止指令が 指定した信号の入力で停止 ①bの最高速度設定で アラーム/±急停止・減速停止リミット アラーム/±急停止・減速停止リミット アラーム/±急停止・減速停止リミット
入るまでドライブを実行 ドライブ開始 汎用入力 8点 8点 16点
停止入力/コマンド 移動量オーバーライド ②cの速度へ
f f f コマンド実行 ① ② ③ オーバーライド実行
(遠方へ設定変更の例) ③a の速度へ ドライブ/加速/定速/減速中 ドライブ/加速/定速/減速中 ドライブ/加速/定速/減速中
c オーバーライド実行 制御出力信号 コンパレータ結果 コンパレータ結果/偏差カウンタクリア コンパレータ結果/偏差カウンタクリア
b 入出力 コマンド受付可出力 コマンド受付可出力
a
汎用出力 8点 8点 16点
t t t
ドライブ終了/コンパレータ結果 ドライブ終了/コンパレータ結果
割込み機能 ドライブ終了/ 論理和出力 論理和出力/割込み調停回路 補間割り込み/論理和出力
補間ドライブ機能(PMC842SR) 多軸直線補間機能 割り込み調停回路
(Y:Y軸座標 X:X軸座標) 複数個のPMC842SRを接続 フィードバック UP/DOWN信号、2相信号(1,2,4逓倍) UP/DOWN信号、2相信号(1,2,4逓倍) UP/DOWN信号、2相信号(1,2,4逓倍)
● 直線補間ドライブ ● 円弧補間ドライブ ● 連続補間ドライブ 動作クロック 5.0V時、Max.40MHz (推奨値:32.768MHz) Max.40MHz(推奨値:32.768MHz) Max.40MHz(推奨値:32.768MHz)
(終点通過指定も可能) (終点通過指定も可能) (円弧・直線補間連続) 3.3V時、Max.20MHz (推奨値:16.384MHz)
Y Y Y CPU PMC
終点 ③ ④ ①直線補間ドライブ 842SR 電源/消費電流 4.5V ~ 5.5V / MAX.100mA
3.0V ~ 3.6V / Max.50mA 3.0V~3.6V / Max.150mA 3.0V ~ 3.6V / Max.300mA
定格
②円弧補間ドライブ
中心点 ③円弧補間ドライブ 外形寸法 100pinTQFP(14×14mm) 100pinTQFP(14×14mm) 176pinLQFP(24×24mm)
終点 ④直線補間ドライブ
同期スタート 周囲温度 -40℃~+85℃ -40℃~+85℃ -40℃~+85℃
(SYNC信号) PMC
開始点 開始点 対応規格 RoHS10物質対応 RoHS10物質対応 RoHS10物質対応
① ② 無限に連続実行が可能 842SR
その他 540モード - -
X X X (例)6軸直線補間 オプション
パラメータ計算アプリ PMC-Assist PMC-Assist PMC-Assist
03 04