このカタログをダウンロードして
すべてを見る



このカタログについて
| ドキュメント名 | インデックステーブル形 RWT |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.4Mb |
| 関連製品 | |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社コガネイ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログ(インデックステーブル形 RWT)の内容
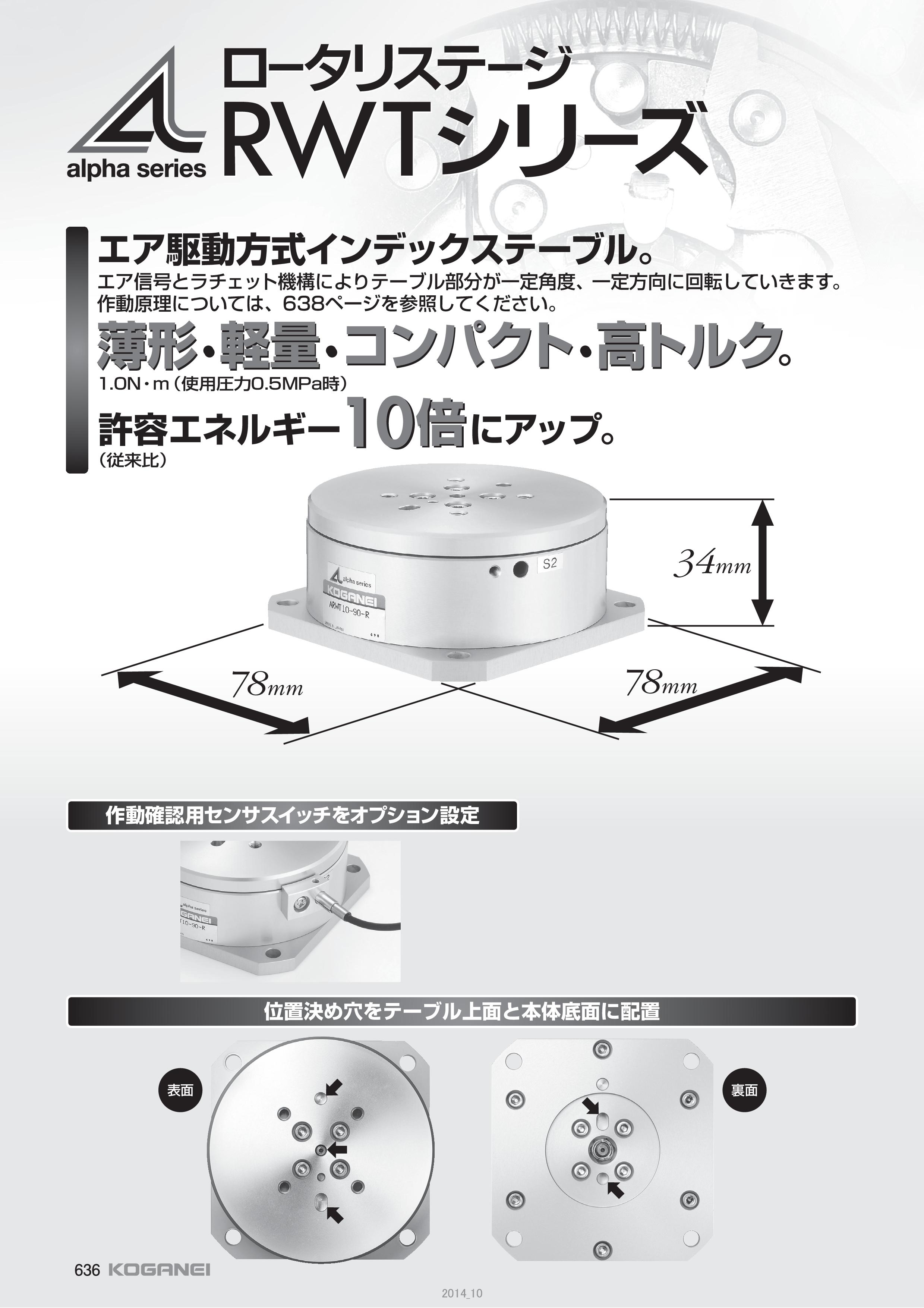
Page 1:裏面エア駆動方式インデックステーブル。エア信号とラチェット機構によりテーブル部分が一定角度、一定方向に回転していきます。作動原理については、638ページを参照してください。ccccc位置決め穴をテーブル上面と本体底面に配置表面作動確認用センサスイッチをオプション設定薄形・軽量・コンパクト・高トルク薄形・軽量・コンパクト・高トルク。1.0N・m(使用圧力0.5MPa時)許容エネルギー10倍にアップ。(従来比)10倍6362014_10
Page 2:穴あけ部品組付ハンダ付け供給・取出●基板の向きを変えてハンダ付けを行う (クレシード ハンダ付ユニットとの組合せ)●自動組立の回転テーブル右回り45゜ 60゜ 90゜45゜ 60゜ 90゜左回りARWT10-45-R(割出し数:8)ARWT10-60-R(割出し数:6)ARWT10-90-R(割出し数:4)ARWT10-45-L(割出し数:8)ARWT10-60-L(割出し数:6)ARWT10-90-L(割出し数:4)使用例45゜60゜90゜右回り 左回り回転方向は、右回り(時計回り)、左回り(反時計回り)の2タイプ。注:逆には回転しません。回転角度は、45゜, 60゜, 90゜、の3タイプ。6372014_10
Page 3:作動原理①テーブル回転終了工程 テーブル作動 ラチェット機構作動 ピストン部作動●テーブル固定状態●テーブル固定状態●テーブル固定状態●テーブルがピストン部と連結され回転●テーブルが一定角度回転して固定状態●ノックプレートがストッパAを押して 歯車を固定●ラチェットは歯車を固定●ストッパAは歯車を固定●ラチェットが歯車を開放してノックプレートと共に回転●ストッパAは歯車を固定●ラチェットは歯車を開放●ラチェットがストッパBを介してストッパAを歯車より開放●ラチェットが歯車を固定してノックプレート、歯車と共に回転●ノックプレートがストッパAを押して歯車を固定●ラチェットは歯車を固定●ピストン部回転側へ押し切り●ピストン部戻り側へ移動開始●ピストン部戻り側へ押し切り●ピストン部回転側へ移動開始●ピストン部回転側へ押し切り②ピストン部戻り開始③ピストン部戻り終了④テーブル回転開始⑤テーブル回転終了●テーブルは、ピンCにより歯車と連結されています。●ラチェット、ノックプレートは、同一プレート上に有り連動します。●ラチェットは連結軸によりピストン部と連結されています。●ロータリステージRWTシリーズは①→②→③→④→⑤で1cycleとなります。注1:ロータリステージRWTシリーズを作動させる場合は、必ず「①テーブル回転終了」の状態よりスタートしてください。 2:ロータリステージRWTシリーズが圧力低下等で回転途中で止まってしまった場合は、必ず「③ピストン部戻り終了」の状態よりスタートさせてください。 3:ロータリステージRWTシリーズにバルブを接続するときはノーマルオープン側を回転側配管接続口に接続してください。回転側配管接続口(PA)戻り側配管接続口(PB)ピンC連結軸ノックプレートストッパA ストッパB歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側印加 排気 印加 排気ピンC連結軸ノックプレートストッパA ストッパB歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側印加 排気連結軸歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側回転側配管接続口(PA)戻り側配管接続口(PB)ピンC連結軸ノックプレートストッパA ストッパB歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側印加排気印加 排気 印加 排気回転側配管接続口(PA)戻り側配管接続口(PB)ピンC連結軸ノックプレートストッパA ストッパB歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側印加 排気 印加 排気ピンC連結軸ノックプレートストッパA ストッパB歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側印加 排気続口PA)車印加排気印加 排気 印加 排気回転側配管接続口(PA)戻り側配管接続口(PB)ピンC連結軸ノックプレートストッパA ストッパB歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側印加排気印加 排気 印加 排気回転側配管接続口(PA)戻り側配管接続口(PB)ピンC連結軸ノックプレートストッパA ストッパB歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側印加 排気 印加 排気印加排気印加 排気)印加排気印加 排気 印加 排気回転側配管接続口(PA)戻り側配管接続口(PB)ピンC連結軸ノックプレートストッパA ストッパB歯車ラチェット ピンCピストン部印加排気連結軸戻り側回転側印加排気印加 排気 印加 排気印加排気印加排気注:図はARWT10-90-R(右回転)です。-L(左回転)タイプは左右対称となります。ロータリステージは、エア信号とラチェット機構により、テーブル部分が一定角度、一定方向に回転していきます。6382014_10
Page 4:取扱い要領と注意事項1. アクチュエータに配管する前に、必ず配管内のフラッシング(圧縮空気の吹き流し)を十分に行なってください。配管作業中に発生した切り屑やシールテープ、錆などが混入すると、空気漏れなどの作動不良の原因となります。2.アクチュエータに配管、継手類をねじ込む場合は、下記の適正締付トルクで締付けてください。3.戻り側(PBポート)の配管接続口には必ずスピードコントローラを取り付けてください。 またスピードコントローラは、一番絞った状態から調整してください。配管無給油で使用できますが、給油をする場合には、タービン油1種(ISOVG32)相当品を使用してください。スピンドル油、マシン油の使用は避けてください。潤滑水滴、油滴などがかかる場所で使用する時は、カバーなどで保護してください。また、結露させないでください。雰囲気装置およびアクチュエータの初期作動において、急激に圧縮空気を印加するとアクチュエータの構造上、速度制御が不能となる場合があり、装置およびアクチュエータを破損する可能性があります。圧縮空気を遮断する場合は必ずテーブルが回り切った状態で遮断し、ストッパが作動している事を確認してください。また、万一回転途中で圧縮空気を遮断した場合は、戻り側(PBポート)の配管接続口より印加し、背圧の掛かった状態で使用してください。(638ページ作動原理参照)使用時1. 使用流体は空気を使用し、それ以外の流体の場合は最寄りの弊社営業所へご相談ください。2. アクチュエータに使用される空気は、劣化したコンプレッサ油などを含まない清浄な空気を使用してください。アクチュエータやバルブの近くにエアフィルタ(ろ過度40μm以下)を取り付けて、ドレンやゴミを取り除いてください。またエアフィルタのドレン抜きは定期的に行なってください。空気源接続ねじM5×0.8締付けトルク N・cm157取付1. 取付方向は水平取付(テーブル面上向き)のみとなります。それ以外の取付方向では内部部品が外れ破損や作動不良の原因となります。2. 取付面は必ず平面としてください。取付時にねじれや曲がりが発生すると、エア漏れや作動不良の原因となります。3. アクチュエータの取付面に傷や打痕を付けると、平面度を損なうことがありますので注意してください。4. 衝撃または振動によるボルトの緩みの恐れがある場合は、緩み止めなどを考慮してください。5. ワークの取り付けはテーブル面にワーク固定用のねじ穴がありますが、必ずねじ深さ以下となるようなボルトを使用してください。ねじ深さを超えるようなねじを使用すると、内部部品と干渉し正常に作動しません。ワーク取付時のねじ締め付けは、制限範囲内のトルク値で締め付けてください。6. ロータリステージRWTシリーズを取付ける際は制限範囲内のトルク値で締め付けてください。形式 ねじサイズねじ深さL(mm)最大締付けトルク(N・m)ARWT10 M4×0.7 5 1.50地天地天天地テーブル面テーブル面テーブル面形式 ねじサイズ最大締付けトルク(N・m)ARWT10 M5×0.8取付方法通し穴 3.0PBPAワークをボルトなどでテーブルに固定する際は、テーブルまたはワークを保持して行なってください。本体を保持して締め付けますと、ストッパ、歯車等に過大なモーメントが加わり、破損につながります。本体通し穴による取付ワーク固定用ねじワークねじ深さLテーブルワーク固定用ねじ穴一般注意事項 取付6392014_10
Page 5:空気流量・空気消費量取扱い要領と注意事項形式シリンダ容積 VARWT10-459.6ARWT10-6010.6ARWT10-9012.8Q1:ロータリステージに必要な空気流量 R/min(ANR)Q2:ロータリステージ空気消費量 R/min(ANR)V:ロータリステージ1cycleのシリンダ容積 cm3t:ロータリステージ1cycleに必要な時間 sn:1分間あたりの作動回数 cycle/minP:使用圧力 MPa注:ロータリステージの1cycleとは、エア信号により内部のピストンが送り準備のために戻りの位置まで戻り、テーブルを一定角度送るまでとなります。テーブル回転とピストンの動きについては638ページをご覧ください。※:ロータリステージRWTシリーズは、シリンダの構造上200cm3/min(ANR)以下の空気漏れがあります。1cycleのシリンダ容積●空気流量(F.R.L.、バルブなどを選定する場合)cm3Q2 = V×n×P+0.1013+200※ ×10−3●空気消費量の求め方0.1013●実効トルク●許容荷重0.20.40.250.50.30.60.350.70.40.80.450.90.51.00.551.10.61.2形式ARWT10ARWT105001.5項目 形式許容スラスト荷重WS(N)注1許容ラジアル荷重WR(N)注2許容モーメント荷重M(N・m)空気圧力MPaN・m00.00.20.40.60.81.01.21.40.1 0.2 0.3 0.4 0.5 0.6 0.7空気圧力 MPaN・m実効トルクWSWRWRMPBPAPBPAPBPA地天スラスト荷重ラジアル荷重モーメント荷重回転時間の制御は両端をセンサスイッチで検出するシーケンス制御をお奨めします。タイマー制御をする場合は、以下の点にご注意ください。●回転側は確実に終端まで回転し、ストッパが必ず作動することを確認してください。●戻り側は外部から確認できませんので、スピコン等での調節をせず、0.2sec以上の時間設定を行なってください。回転時間制御注1:スラスト荷重には方向性があります。(下図参照)注1:テーブル面から天方向にはかけないでください。 2:ラジアル荷重がかかる状態では使用できません。( )Q1= 6.4×60×P+0.1013+200※ ×10−30.1013t( )6402014_10
Page 6:●機種の選定方法1. 使用条件の確認下記①〜④を確認します。①回転角度(45゜、60゜、90゜)および回転方向(右回転、左回転)②回転時間(s)③印加圧力(MPa)④負荷の形状および材質⑤取付方向(姿勢)2. 回転時間の確認1 −②で確認された回転時間が仕様の回転時間調節範囲内であることを確認します。3. トルクの確認物体を回転させるために必要なトルクTAを求めます。選定負荷および回転時間は「機種の選定方法」に従って仕様範囲内で選定を行なってください。また、各許容値の8割程度を目安にすることをお奨めします。シリンダ部やガイド部への悪影響を最小限に抑えることができます。1−③で確認された印加圧力で、必要トルクTAが得られる事を640ページの実効トルク表または線図で確認してください。4. 運動エネルギーの確認運動エネルギーが許容エネルギーを超えますと、アクチュエータの破損を招きます。必ず許容エネルギー以内になるようにしてください。許容運動エネルギーは表1を参照してください。運動エネルギーを求めます。6. 使用可否の判定4.運動エネルギー、5.負荷率共に満足している場合が使用可能となります。E < Ea負荷率の総和 ≦ 15. 負荷率の確認負荷率の総和が1を超えないことを確認します。許容荷重は表2を参照してください。(荷重方向は640ページ許容荷重をご覧ください。) WS + M ≦1WS MAX M MAXTA : トルク(N・m) I : 慣性モーメント(kg・m2) …643〜644ページの計算式により求める。ω : 等角加速度(rad/s2) K : 余裕係数 5θ : 回転角度(rad) 45゜→0.79rad 60゜→1.05rad 90゜→1.57rad t : 回転時間(s)TA = IωKω =2θt2E : 運動エネルギー(J) I : 慣性モーメント(kg・m2) …643〜644ページの計算式により求める。ω : 角速度(rad/s)θ : 回転角度(rad) 45゜→0.79rad 60゜→1.05rad 90゜→1.57rad t : 回転時間(s)Ea : 許容エネルギー…表1参照E =1× I ×ω2ω =2θt2角度45゜60゜90゜回転時間(s)0.1〜0.50.13〜0.670.2〜1.0形式ARWT10許容エネルギー(J)0.050表1. 許容エネルギーEa形式ARWT10スラスト荷重 WS MAX(N)50モーメント荷重 M MAX(N・m)1.5表2. 許容荷重E < Ea注:回転時間は無負荷時の全周が円滑に作動する時の値です。・・・6412014_10
Page 7:選定●計算例1. 使用条件の確認①回転角度:90゜②回転時間:0.5(s)③印加圧力:0.5(MPa)④負荷の形状…上記に示す 負荷の材質 …ベース:アルミ合金A5056(比重注= 2.64×103kg/m3) …円柱負荷:アルミ合金A5056(比重注= 2.64×103kg/m3)⑤取付方向(姿勢):水平 注:比重は、合金によって変りますので使用されます金属の比重を確認の上、計算をお願いいたします。2. 回転時間の確認回転時間は0.5s/90゜なので、0.2〜1.0s/90゜以内であり問題ない。3. トルクの確認最初に慣性モーメントを計算します。ベースm1=π×0.082×0.01×2.64×103=0.133(kg)I1 =0.133×0.082 =1.06×10−4(kg・m2)…①円柱負荷m2=π×0.032×0.02×2.64×103=0.037(kg)I2=0.037×0.032+0.037×0.032 =0.37×10−4(kg・m2)…②①、②より、全体の慣性モーメント I はI = I1 + I2= 1.06×10− 4+ 0.37×10− 4=1.43×10−4(kg・m2)…③条件より、θ=90゜、t=0.5(s)したがって、等角加速度ωはω=2×1.57=12.56(rad/s2)…④③、④より、必要なトルクTAはTA=1.43×10−4×12.56×5 =0.009(N・m)…⑤0.5MPa時の実効トルクは1.0(N・m)であり、問題なし。880.524. 運動エネルギーの確認条件より、θ=90゜、t=0.5(s)したがってω=2×1.57=6.28(rad/s)…①①より、運動エネルギーEはE=1×1.43×10−4×6.282=0.003(J)…②許容エネルギーは0.050(J)であり、問題なし。5. 負荷の確認【スラスト荷重】合計質量は0.133+0.037=0.170(kg)したがってWS=0.170×9.8=1.666(N)…①【モーメント荷重】ベースのモーメント荷重M1はM1=0.133×9.8×0=0(N・m)…②円柱負荷のモーメント荷重M2はM2=0.037×9.8×0.03=0.011(N・m)…③②、③より、モーメント荷重の合計はM=0+0.011=0.011(N・m)…④①、④より、負荷率を求める WS + M =1.666+0.011=0.04<1.0となり、負荷率は、1.0以下であり問題なし。6. 使用可否の確認運動エネルギー、負荷率共に満足しているため、使用可能。0.52WS MAX M MAX 50 1.544ベース上に円柱負荷がある場合(図の単位mm)φ80φ30102030ベース円柱負荷・・6422014_10
Page 8:選定●薄い長方形板(直方体)●板の長さ a1(m) a2(m)●辺の長さ b (m)●質量 m1(kg) m2(kg)■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径■慣性モーメント I(kg・m2) ■回転半径12 12I=m1(4a12+b2)+ m2(4a22+b2)dd1d2RR1R2Ram1bdd Iaロータリステージ負荷Ibアームm2R1集中荷重aba1ba2R212(4a12+b2)+(4a22+b2)●直方体●辺の長さ a(m) b(m)●質量 m(kg)備考:すべらせて使用する場合は別途考慮。12I=m(a2+b2)(A)Jの値→大 Jの値→小(B)dd1d2RRabdR1集中荷12a2+b2【回転軸がワークを通っている場合】■慣性モーメント算出用図●円盤●直径 d(m)●質量 m(kg)備考:すべらせて使用する場合は別途考慮。8I=md2(A)Jの値→大 Jの値→小(B)dd1d2RR1R2Ram1bdd Iaロータリステージ負荷Ibアームm2R1集中荷重aba1ba2R28d2●段付円盤●直径 d1(m) d2(m)●質量 d1部分 m1(kg) d2部分 m2(kg)備考:d1部分に比べてd2部分が非常に小さい場合は無視してよい。8I=1(m1d12+m2d22)(A)Jの値→大 Jの値→小(B)d1d2Rdd8d12+d22●棒(回転中心が端)●棒の長さ R(m)●質量 m(kg)3I=mR2(A)Jの値→大 Jの値→小(B)dd1d2RR1R2Ram1bdd Iaロータリステージ負荷Ibアームm2R1集中荷重aba1ba2R23R2●棒(回転中心が重心)●棒の長さ R(m)●質量 m(kg)12I=mR2(A)Jの値→大 Jの値→小(B)d1d2Rdd12R2●細い棒●棒の長さ R1(m) R2(m)●質量 m1(kg) m2(kg)3 3I =m1・R12+m2・R22d2RR1R2Ram1bdd Iaロータリステージ負荷Ibアームm2R1集中荷重aba1ba2R23R12+R226432014_10
Page 9:選定■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)■慣性モーメント I(kg・m2)●集中荷重●集中荷重の形状●集中荷重の重心までの長さ R1(m)●アームの長さ R2(m)●集中荷重の質量 m1(kg)●アームの質量 m2(kg)回転半径:k2は集中荷重の形状により算出する。備考:m2がm1に比較して非常に小さい場合はm2=0で計算してよい。3I=m1k2+m1R12+m2R22R1R2am1bdd Iaロータリステージ負荷Ibアームm2R1集中荷重aba1ba2R2●直方体●辺の長さ h(m)●回転軸から負荷中心までの距離 L(m)●質量 m(kg)備考:立方体も同じ。12I=mh2+mL2LhLh2h2h1h1LdLd2d1●歯車●歯車 ロータリ側 a 負荷側 b●負荷の慣性モーメント N・m歯車を介する場合の負荷JLをロータリステージ軸まわりに換算する方法【回転軸がワークからオフセットしている場合】負荷のロータリ軸まわりの慣性モーメント備考:歯車の形状が大きくなると歯車の慣性モーメントを考慮する必要がある。bIa= a IbR1R2am1bdd Iaロータリステージ負荷Ibアームm2R1集中荷重aba1ba2R2●中空の直方体●辺の長さ h1(m) h2(m)●回転軸から負荷中心までの距離 L(m)●質量 m(kg)備考:断面は立方体のみ。12I=m(h22+h12)+mL2LhLh2h2h1h1LdLd2d1●円柱●直径 d(m)●回転軸から負荷中心までの距離 L(m)●質量 m(kg) 16I=md2+mL2LhLh2h2h1h1LdLd2d1●中空の円柱●直径 d1(m) d2(m)●回転軸から負荷中心までの距離 L(m)●質量 m(kg)I=m(d22+d12)+mL2LhLh2h2h1h1LdLd2d11626442014_10
Page 10:RWTシリーズ仕様表示記号項目作動形式実効トルク注1使用流体使用圧力範囲保証耐圧力使用温度範囲回転方向回転角度回転時間調節範囲注2許容エネルギー許容スラスト荷重許容モーメント荷重給油配管接続口径ARWT10-45-R右(時計回り)ARWT10-45-L左(反時計回り)ARWT10-60-R右(時計回り)ARWT10-60-L左(反時計回り)ARWT10-90-R右(時計回り)ARWT10-90-L左(反時計回り)N・mMPaMPa℃s/90゜JNN・m形式注1:実効トルクは使用空気圧力0.5MPa時の値です。 2:回転時間調節範囲は無負荷時の全周が円滑に作動する時の値です。複動形ピストンタイプ(歯車・ラチェット機構)1.0空気0.2〜0.60.90〜60(但し、結露なきこと)60゜±0.2゜0.2〜1.00.050501.5不要(給油する場合は、タービン油1種〔ISO VG32〕相当品)M5×0.845゜±0.2゜ 90゜±0.2゜質量形式本体センサスイッチAssy注ARWT10-45-R ARWT10-45-L ARWT10-60-R ARWT10-60-L ARWT10-90-R ARWT10-90-Lg注:センサスイッチAssy 1セット分の質量(ケーブル3m分含む)47230473 470注文記号ARWT - -アルファシリーズロータリステージRWTシリーズ回転方向R:右回転(時計方向)L:左回転(反時計方向)センサスイッチAssy無記入:センサスイッチAssyなし SW1:1個付 SW2:2個付●センサスイッチAssyの詳細は649ページをご覧ください。回転角度(割出し数)45:45゜(割出し数:8)60:60゜(割出し数:6)90:90゜(割出し数:4)公称トルク10:1.0N・m(使用空気圧力0.5MPa時)-106452014_10
Page 11:内部構造図ADBC断面A−H断面E−E 断面F−F HEF断面A−H−B−C−D断面E-E(ストッパ作動時)E-E断面図(ストッパ開放時)G-G断面図46 5 43943FGG447E名 称本体A本体BテーブルベースA揺動プレートインディクスプレートノックプレートカバーラチェットカムツメローラーストッパAストッパBストッパC主軸連結軸ピストン材 質アルミ合金(アルマイト処理)アルミ合金(アルマイト処理)アルミ合金(アルマイト処理)ステンレス鋼ステンレス鋼硬鋼硬鋼ステンレス鋼硬鋼硬鋼硬鋼硬鋼硬鋼硬鋼硬鋼硬鋼硬鋼樹脂各部名称と主要部材質No●●●●●●●●●●●●●●●●●●No ①②③④⑤⑥⑦⑧⑨⑩⑪⑫⑬⑭⑮⑯⑰⑱名 称リテーナセパレータ歯車バンパクラッチブッシュAブッシュBブッシュDブッシュE連結ピンピンCナットスプリングピストンパッキンOリング六角穴付ボルト六角穴付ボルト材 質樹脂樹脂硬鋼合成ゴム(ウレタン)—黄銅黄銅黄銅黄銅ステンレス鋼ステンレス鋼ステンレス鋼ステンレス鋼合成ゴム(NBR)合成ゴム(NBR)ステンレス鋼ステンレス鋼No●●●●●●●●●●●●●●●●●No⑲⑳注:図は-R(右回転)タイプです。-L(左回転)タイプは左右対称となります。6462014_10
Page 12:寸法図(mm)□78□6220φ9824+0.012 0深さ44−φ5.5貫通φ4H7(+0.012 0 )深さ4φ40H7( )+0.025 0深さ134135.324.75.5M5×0.8配管接続口(回転側)M5×0.8配管接続口(戻り側)φ77φ7824+0.012 0深さ415°15°45°45°147°67.5°(φ4.8)(S1)(S2)φ3.82-センサスイッチAssyケーブルφ2.6長さ3m5°17°13.96φ4H7(+0.012 0 )深さ1.5φ4H7(+0.012 0 )深さ4P.C.D.φ35□78□622024+0.012 0深さ44−φ5.5貫通φ4H7(+0.012 0 )深さ434135.324.75.5M5×0.8配管接続口(回転側)M5×0.8配管接続口φ77φ7824+0.012 0深さ415°15°45°45°147°67.5°(φ4.8)φ3.82-センサスイッチAssy回転端側検出スイッチ(S1)戻り端側検出スイッチ戻り端側検出スイッチ(S2)(戻り側)ケーブルφ2.6長さ3m5°17°13.96P.C.D.φ35φ4H7(4-M4×0.7深さ5φ4H7( )深さ4+0.012 0+0.012 0)深さ1.5回転角度:45°±0.2°(ARWT10-45-R)回転角度:60°±0.2°(ARWT10-60-R)回転角度:90°±0.2°(ARWT10-90-R)回転端側検出スイッチ回転角度:45°±0.2°(ARWT10-45-L)回転角度:60°±0.2°(ARWT10-60-L)回転角度:90°±0.2°(ARWT10-90-L)4-M4×0.7深さ5φ98φ40H7( )深さ1+0.025 0PBPAS1注意事項ラベルPBPAS1注意事項ラベルARWT10-□-R- センサスイッチAssyARWT10-□-L- センサスイッチAssy6472014_10
Page 13:SW-ARWT0.8mm±15%0〜0.6mm鉄5×5×t1mm作動距離の15%以下20μm以下12〜24V DC±10% リップルP-P10%以下15mA以下NPNトランジスタ・オープンコレクタ ●最大流入電流:50mA ●印加電圧:30V DC以下 ●残留電圧:0.4V以下(流入電流50mAにて)接近時ON1kHz赤色LED(出力ON時点灯)IP67(IEC)、防浸形(JIS)注3− 25〜70℃、保存時:− 25〜80℃35〜95% RH、保存時:35〜95% RHAC500V 1分間 充電部一括・ケース間DC250V メガにて5MΩ以上 充電部一括・ケース間耐久10〜55Hz 複振幅1.5mm XYZ各方向2時間(非通電時)耐久200m/s2(約20G) XYZ各方向10回(非通電時)使用周囲温度− 25〜70℃にて20℃のときの検出距離の±20%以内使用電圧の±10%の変動にて±2%以内ケース:ステンレス(SUS304)、樹脂部:TPX0.08mm23芯 耐油・耐熱・耐寒 キャブタイヤケーブル3m付約30g項目最大検出距離注1安定検出範囲注2標準検出物体応差(ヒステリシス)繰り返し精度電源電圧消費電流出力出力動作最大応答周波数動作表示灯耐環境性検出距離の変動材質ケーブル質量保護構造使用周囲温度使用周囲湿度耐電圧絶縁抵抗耐振動耐衝撃温度特性電圧特性形式注1:最大検出距離は、標準検出物体に対する最大検出距離を示します。 2:安定検出範囲は、使用周囲温度や電源電圧の変動を考慮し、標準検出物体を安定して検出できる距離範囲を示します。 3:保護構造はケーブルを含んで規定されていますが、ケーブル末端は防水処理されていませんので、保護構造の対象とはなりません。 従って、ケーブル末端から水が進入する恐れがある使用方法は避けてください。仕様注文記号SW - ARWTセンサスイッチ(ホルダ、取付ねじ付)シリーズARWT:アルファシリーズ ロータリステージRWTシリーズここから水が浸入しないことロータリステージRWTシリーズ以外の組合せで使用しないでください。センサスイッチ(SW-ARWT)は、ロータリステージRWTシリーズとの組合せで使用するように設計されています。その他のアクチュエータとの組合せで使用しますと正常に作動しない可能性があります。注 意6482014_10
Page 14:内部回路図センサスイッチ寸法図(mm)負荷(茶)+Vリード線の色(黒)出力TrDZD50mAMAX.(青)0VDC12〜24V±10%+−主回路MODEL:SW-ARWT作動表示灯R39R45φ3.8(φ4.8)22°5°10°1110.1±0.05センサスイッチ(サンクス製GX−3SC金具付)ケーブルφ2.6長さ3m止めねじ注1ホルダセンサスイッチの取付要領●取付用ナベ小ねじの締付けトルクは0.63N・mにしてください。記号…D :電源逆接続保護用ダイオード ZD:サージ電圧吸収用ツェナーダイオード Tr :NPN出力トランジスタセンサ位置識別用ラベルS1:回転終了確認用S2:シリンダ戻り確認用取付用ナベ小ねじM3×0.5長さ8注1:止めねじは緩めないでください。センサスイッチのホルダよりの出っ張り長さが変わりますと破損や作動不良の原因となります。 2:止めねじを締め直す場合は、ホルダよりの出っ張り長さを確認の上、作動表示灯と直交する方向から締付トルク0.29N・m±10%で締め付けてください。 3:取付用ナベ小ねじ(M3×0.5長さ8)1個が添付されています。6492014_10