


現場の課題はJ4で解決!
現場の課題
◆課題1
機械へのショックなしに圧入したい
→解決!押当て制御
◆課題2
装置の動作を監視したい
→解決!安全信号監視機能
◆詳細はカタログをダウンロードしご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | 現場の課題はこれで解決!MELSERVO-J4 Solutions「vol.06 圧入装置」 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 3.2Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 三菱電機株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
01
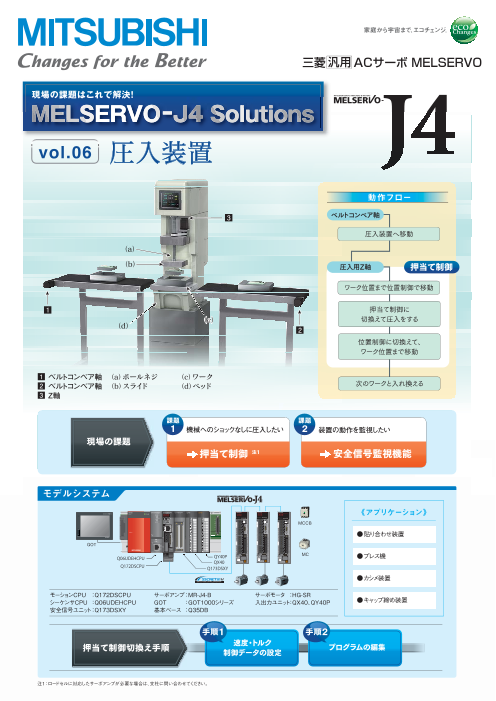
ACサーボ MELSERVO
現場の課題はこれで解決!
MELSERVO-J4 Solutions
vol.06 圧入装置
動作フロー
■3 ベルトコンベア軸
圧入装置へ移動
(a)
(b) 圧入用Z軸 押当て制御
ワーク位置まで位置制御で移動
■1 押当て制御に
(c) 切換えて圧入をする
(d) ■2
位置制御に切換えて、
ワーク位置まで移動
■1 ベルトコンベア軸 (a) ボールネジ (c) ワーク
■2 ベルトコンベア軸 (b) スライド (d) ベッド 次のワークと入れ換える
■3 Z軸
課題 課題
1 機械へのショックなしに圧入したい 2 装置の動作を監視したい
現場の課題
押当て制御 注1 安全信号監視機能
モデルシステム
Q173DSXY QX40 QY40P
GOT
Q64PN POWER 《アプリケーション》
CON0 CON0 CON0 CON0 CON0
30 30 30 30 30
25 25 25 25 25
20 20 20 20 20 MCCB
15 15 15 15 15
10 10 10 10 10
5 5 5 5 5
PULL 1 1 1 1 1A B A B A B A B A B ●貼り合わせ装置
GOT
MC
Q06UDEHCPU QY40P ●プレス機
QX40
Q172DSCPU Q173DSXY
●カシメ装置
モーションCPU :Q172DSCPU サーボアンプ:MR-J4-B サーボモータ :HG-SR
シーケンサCPU :Q06UDEHCPU GOT :GOT1000シリーズ 入出力ユニット:QX40、QY40P ●キャップ締め装置
安全信号ユニット:Q173DSXY 基本ベース :Q35DB
手順1 手順2
押当て制御切換え手順 速度・トルク制御データの設定 プログラムの編集
注1:ロードセルに対応したサーボアンプが必要な場合は、支社に問い合わせてください。
Page2
02.ai
現場の課題は で解決!
解決
1 押当て制御 スムーズな切換えでタクトタイムも短縮!
位置制御から停止することなくス
ムーズに押当て制御に切り換える
ことができます。押当て制御中も スライド
現在位置管理をしているので、押
ワーク
当て制御から位置制御に切換え ベッド
た後も高速に位置決めができ、タ 位置制御 トルク制御(押当て制御) 位置制御
クトタイムの短縮が図れます。 位置制御で高速位置決め 押当て制御に切換えて、指定トルクで圧入 位置制御に切換えて退避点まで移動
トルク制御に切換えた瞬間、モータ軸が 機械へのショックなしに、
従来のトルク制御
加速するので、機械にショックを与えます。
押当て制御
トルク制御に切換えることができます。
切換え位置 切換え位置
位置制御 トルク制御 位置制御 押当て制御
速度 ※ 速度 ※
トルク(%) トルク(%) 3 ズな
1 3
トルク
1 スムー トルク
時間 押当て制
御の
え 時間2 切換 2
切換え信号 切換え信号
※① トルク制御に切換えた瞬間に指定のトルク(%)に強制的に切換わる。その結果、再加速する。 ※① 押当て制御に切換えても押当て速度以下になるまでは、減速を継続する。
② 速度制限値に達すると、強制的に速度制御となり、急減速する。 ② 速度制限値以下になったらトルク制御に切換わる。
③ 速度制限値以下の速度になると、トルク制御に切換わる。 ③ 指定のトルク(%)へ時定数に従って増加していく。
解決 安全信号監視機能 安全監視機能もサーボアンプ(MR-J4-B)、2 モーションコントローラに標準搭載
ライトカーテン、非常停止ボタンなど複数点の安
全信号を監視する安全システムを構築できます。
安全機能の動作条件はシー
ケンサCPU、モーションCPU
のプログラムで変更できます。
Q06UDHCPU Q173DSCPU Q173DSXY
Q64PN POWER
CON0 CON0 CON0 CON0 CON0 CON0
SW
30 30 30 30 30 30
1 2
STOP RUN 25 25 25 25 25 25
EMI 20 20 20 20 20 20
15 15 15 15 15 15
10 10 10 10 10 10 MCCB
5 5 5 5 5 5
1 1 1 1 1 1
A B A B A B A B A B A B
PULL
MC
シーケンサ側 モーション側 OPEN
C
INPUT N
CNP1 100V 5AC
L1
L2
L3
動力遮断 CN- N3P3
P4
C
CNP2 N
8
P+
(STO出力) CD CNL11 1A
L21
CNP3
U CN
V 1 ライトカーテンB
W
CHARGE
C
N
2
C
MR-J4-B N2LSER:XXXXXXXXX CNMR-J4-10B 4
非常停止ボタン
CN2 CN1
EXT . I/F PERIPHERAL I/F
Page3
03.ai
立上げ手順
手順1
◎サーボデータ
速度・トルク
制御データの設定
システム構成を設定後、サーボ ダブルクリック
データ画面より速度・トルク制
御データを設定します。
手順2
プログラムの編集
ワーク位置
まで移動
位
置
モーションSFCプログラム、サーボ 制 ワーク位置
御 -5mmを検出
プログラムを作成します。
は
制御モード切
換え
30)と 移動中に
制御モード(
押当て制御 押当て制御に
換えフラグを 切換える
制御モード切
ONするだけ
です
押
当
て
制 指令トルクと
御 実トルク
<1.0%以内
押当て制御も
簡単に切換え
圧入後
位置制御に
位 切換える
置
制
御
退避位置
まで移動
Page4
04.ai.pdf
の
特 長 安全も使いやすさも、サーボの先端へ。
安全機能 IEC/EN 61800-5-2の安全機能に標準対応
STO(Safe Torque Off)、SS1※(1 Safe Stop 1)の 〈STO機能による遮断〉 〈STO/SS1による遮断〉
安全機能に標準対応。装置の安全システムを簡単に
ノーヒューズ ノーヒューズ
構築できます。(SIL 2) 遮断器(MCCB) 遮断器(MCCB)
遮断
安全リレー
◎サーボアンプの制御回路電源を落とす必要がないため、 回路 再起動防止用の 再起動防止用の
電磁接触器が不要! 電磁接触器が不要!
再起動時間を短縮化。また、再原点復帰の必要もあ
りません。
サーボアラーム用 サーボアラーム用
電磁接触器(MC)※2 電磁接触器(MC)※2
◎不慮のモータ再起動防止用の電磁接触器が不要 安全ロジックユニット
(MR-J3-D05や安全シーケンサなど)
になります。※2
MR-J4-B MR-J4-B SS1信号
※1 安全ロジックユニット(MR-J3-D05など)が必要です。
※2 STO機能により2個の電磁接触器を削減できます。
ただし、この図では、アラーム発生時の電源遮断用に、 モータ モータ
サーボモータ サーボモータ
電磁接触器を1個取り付けています。 停止 停止
Easy to Use 立上げ・調整機能を磨き上げた MR Confi gurator2
◎グラフ機能 ◎マシンアナライザ
測定チャンネル数をアナログ7ch、デジタル8chに拡張しました。1回の測 [開始]ボタンで、サーボモータを自動的に加振させ、機械
定で様々なサーボの状態を同時に波形で表示し、立上げ、調整をサポート。 系の周波数特性(0.1Hz~4.5kHz)を解析可能。機械
複数データの[重ね書き]機能、過去のグラフ履歴を表示する[履歴選 共振抑制フィルタなどの設定を支援します。
択]機能など、便利な機能も充
実しています。また、モーション 機械特性が
コントローラ経由での通信によ 測定可能!
り、接続軸数分の波形測定が
同時に行えます。
保全機能 機械診断機能を標準装備。メンテナンス性向上 特許出願中 NEW
サーボアンプの内部データか 機械情報を
〈MR Congifurator2で モニタリング MR-J4-B
ら、装置の摩擦、負荷慣性モー モニタが可能〉 サーボアンプ内で
OPEN
C
INPUT N 摩擦や振動を
CNP1 100V 5AC
メント、アンバランストルク、振
L1
パソコン GOT
SSCNETⅢ/H対応
L2
L3
C
N 自動推定しN- 3
モーションコントローラ
P3
P4
C
CNP2 N 変化を検出!
動成分の変化を解析し、機械
8
P
GOT
+
C
Q06UDHCPU Q173DSCPU QY10 QY10 Q173DPX Q172DEX Q172DLX QJ61BT11N QJ71E71-100 指令 D CQ64PN POWER RUN PRM RUN ERRMODE D LINK NINIT COM.ERRSD RD OPEN 100MERR. SD RD L11 1
SW A
STATION NO.
1 2
STOP RUN L21
X10
EMI
CNP3
X1
U CN
MODE 1
PULL V
部品(ボールねじ、ガイド、軸受、
B
10BASE-T/100BASE-TX W
NC
1
2 CHARGE
DA
3 C
N
DB 4
5 2
DG 6
PULL 7 サーボ CN2L
SER:XXXXXXXXX CN
MR-J4-10B 4
ベルトなど)の変化を検出でき 状態データ
ます。駆動部のタイムリーなメ エンコーダ
ンテナンスを支援します。 ボールねじ
サーボモータ
い ま 、サ ー ボ 、モ ー ショ ン は 、人・機 械・環 境 と 響 き 合 う。 S o l u t i o n
ソリューション
本社機器営業部 (03)3218-6740 関越支社 (048)600-5835 北陸支社 (076)233-5502 関西支社 (06)6347-2821 九州支社 (092)721-2251
北海道支社 (011)212-3793 新潟支店 (025)241-7227 中部支社 (052)565-3326 中国支社 (082)248-5445
東北支社 (022)216-4546 神奈川支社 (045)224-2623 豊田支店 (0565)34-4112 四国支社 (087)825-0055
インターネットによる情報サービス「三菱電機FAサイト」
三菱 FA 検索
三菱電機FAサイトでは、製品や事例などの技術情報に加え、トレーニングスクール情報や
各種お問い合わせ窓口をご提供しています。また、メンバー登録いただくとマニュアルや
www.MitsubishiElectric.co.jp/fa/ CADデータ等のダウンロード、eラーニングなどの各種サービスをご利用いただけます。
L(名)03070-A 1209(IP) この印刷物は、2012年9月の発行です。なお、お断りなしに仕様を変更することがありますのでご了承ください。
2012年9月作成
CN2 CN1
EXT . I/F PERIPHERAL I/F