


安定した自動運転レベルL2+を実現する高度なセンサ技術
LiDAR に代わる低コストの魅力的なテクノロジである 4D イメージング・レーダーの飛躍的な進化について解説します。
このカタログについて
| ドキュメント名 | 4D イメージング・レーダー |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| ファイルサイズ | 919.5Kb |
| 登録カテゴリ | |
| 取り扱い企業 | NXPジャパン株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ホワイト・ペーパー
イメージング・レーダー
4Dイメージング・レーダー:
安定した自動運転レベル L2+を実現する
高度なセンサ技術
超高解像度レーダー・マッピングは LiDARに代わる
低コストの魅力的なテクノロジ
執筆者:Huanyu Gu
(NXP Semiconductors ADAS 製品マーケティング/事業開発部門、シニア・マネージャ)
自動車向けセンシングや自動運転向けの 4D イメージング・ いくつかの点ではイメージング・レーダーが上回っています。
レーダー・テクノロジの登場により、自動運転レベル L0 から完全自 商業ベースのコスト構造では LiDAR が大きく後れを取っており、
律走行に相当する L5 への進化が大幅に早まり、その経済性も大きく この差は今後も埋まらない可能性があります。この 2 つのセン
改善されます。新たに、レーダーを使用した精密な環境マッピングが サ・テクノロジは機能面で重なり合う部分が増えているため、
可能になったことで、車両システムの全体的なセンシング能力と環境 それぞれの役割とコストを詳しく検討する必要があるでしょう。
把握能力が飛躍的に強化されます。その結果、自動車業界ではカメ
同時に、自動車業界の重要な転換点となる、安全機能と自動運転
ラ・センサや特に LiDAR センサと比較して、レーダー・センサの果
の L2 から L3 への進化が、どのようなタイミングで、どれくらい
たす役割が再評価されつつあります。
の期間で達成されるのかという点が問題となってきます。OEM が
さまざまな性能や信頼性の指標で比較しても、イメージング・ L3 基準を達成するために必要な、設計上の多くの困難を解決しよ
レーダーと LiDAR の差は縮まってきており、 うとする中で、L2+が新たな開発競争の場となっています。
目次
複雑さのレベル .......................................................... 2 4D イメージング — レーダーの飛躍的進化 ....................... 4
L2+ — 次の技術開発競争の場 ....................................... 3 困難なユース・ケース .................................................. 6
3 種類のレーダー、複数のソリューション ........................ 4 まとめ ...................................................................... 7
LiDAR - 困難な状況下で優れた性能を発揮 ....................... 4
Page2
ホワイト・ペーパーイメージング・レーダー
完全な L3 の達成までにはまだ大きな壁があります。大きな理由は、 さらに、L3 と L4/L5 を区別する重要な要素が 1 つあります。L3 で
L3 では運転者がバックアップとして待機する必要性を解消するため は状況に応じて運転者の介入が必要になります。一方、L4 と L5 で
の冗長性を確保する必要があるためです。このことから L2+が注目 も必要なときに運転者が介入できますが、それを前提とすることは
されるようになり、精力的に開発が進められています。L2+では、 できません。L5 では、ユース・ケースによっては運転者の介入が不
L3 と同等の機能を実現しつつも、運転者がバックアップとして待機 可能です。最低限の条件として、L4 と L5 の自動運転車は人間の補
するため、追加の冗長性を確保する必要性が少なくなっています。 助を受けずに、どのような状況でも自己判断で安全に停止できるこ
とが求められます。
複雑さのレベル
自動運転レベルが高まるほど車両システムの運転責任の割合が増え
以上のことに加え、特に L2 から L3 までの間に大きな壁がある中で るため、自動運転レベルの基準にも新しいシステム冗長性の要件が
は、SAE が定めた自動運転の 5 段階のレベルの中で、4D イメージン 導入されました。L3 では、自動運転が難しい状況では運転者が車両
グ・レーダーが ADAS および AD にもたらす可能性を検討すること を制御できることが求められますが、それ以外の状況では「アイズ
には意味があります。L2 では、運転者が常に注意を払う必要があり オフ、ハンドオフ」の状態になります。自動運転が困難な状況で
ます。車両の安全性を確保する最終的な義務は運転者にあるため、事 は、最大で 1 分の間に、車両の制御が段階的に運転者に引き継がれ
故の際には運転者がその責任を負う可能性があります。ただし L3 以 ます。車両の制御をシステムから運転者へと安全に引き継ぐとい
上では、車両の安全機能が十分に強力であると想定されるため、事故 う、この 1 つの機能を実現するために必要なレベルの冗長性を実現
の責任を車両 OEM が負うことになります。 するだけで、システムの複雑さもコストも大幅に増加することにな
ります。L3 の基準を満たすためにどの程度の数のカメラ・センサ、
レーダー・センサ、LiDAR センサをどのような構成で車両に搭載す
る必要があるのかはまだ未知数ですが、このようなことを考慮する
と、一般的な L2 車両のセンサ構成と比較しても膨大な規模になるで
しょう。
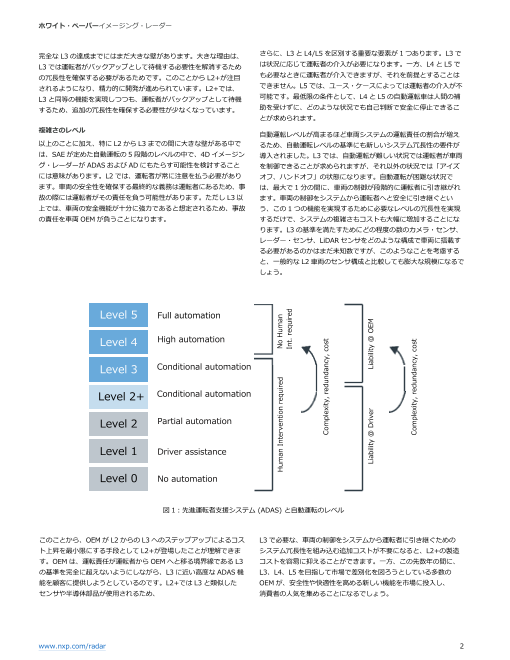
Level 5 Full automation
Level 4 High automation
Level 3 Conditional automation
Level 2+ Conditional automation
Level 2 Partial automation
Level 1 Driver assistance
Level 0 No automation
図 1:先進運転者支援システム (ADAS) と自動運転のレベル
このことから、OEM が L2 からの L3 へのステップアップによるコス L3 で必要な、車両の制御をシステムから運転者に引き継ぐための
ト上昇を最小限にする手段として L2+が登場したことが理解できま システム冗長性を組み込む追加コストが不要になると、L2+の製造
す。OEM は、運転責任が運転者から OEM へと移る境界線である L3 コストを容易に抑えることができます。一方、この先数年の間に、
の基準を完全に超えないようにしながら、L3 に近い高度な ADAS 機 L3、L4、L5 を目指して市場で差別化を図ろうとしている多数の
能を顧客に提供しようとしているのです。L2+では L3 と類似した OEM が、安全性や快適性を高める新しい機能を市場に投入し、
センサや半導体部品が使用されるため、 消費者の人気を集めることになるでしょう。
www.nxp.com/radar 2
Human Intervention required No Human
Int. required
Complexity, redundancy, cost
Liability @ Driver Liability @ OEM
Complexity, redundancy, cost
Page3
ホワイト・ペーパーイメージング・レーダー
L2+ — 次の技術開発競争の場 L3 の実現を目指す OEM は、最終的に次の疑問に取り組むことにな
L2+で安全性や快適性を高める新しい機能が、消費者が好ましいと考 ります。L3 のシステム冗長性を達成するために、L4 で想定されるコ
える価格帯で次々と投入されている現状を考えると、L3 の達成に必 スト負荷と同レベルのコスト負荷がかかるのなら、L3 にとどまる理
要なシステム冗長性を追加するための大幅な価格上昇が消費者に受け 由はあるのでしょうか?L3 であっても最終的には人間が運転状況に
入れられるだろうかという疑問が生じます。 注意しなければならないのなら、顧客は L3 セーフティ・システムの
冗長性のために高い金額を支払うでしょうか?このような疑問に対し
OEM にとっては、L3 の冗長性や困難な状況での自動運転の問題を解
て OEM の認識が一致しているわけではないかもしれませんが、数年
決するために必要な莫大なコストを、L2+なら回避することができま
以内に L2+車両の数が L3 車両の数を大幅に超えることは当然予測で
す。これは、自動運転車両の商業的な魅力を薄れさせかねないほどの
きます。
コストです。さらに OEM は L2+を利用して、安全性や快適性を高め
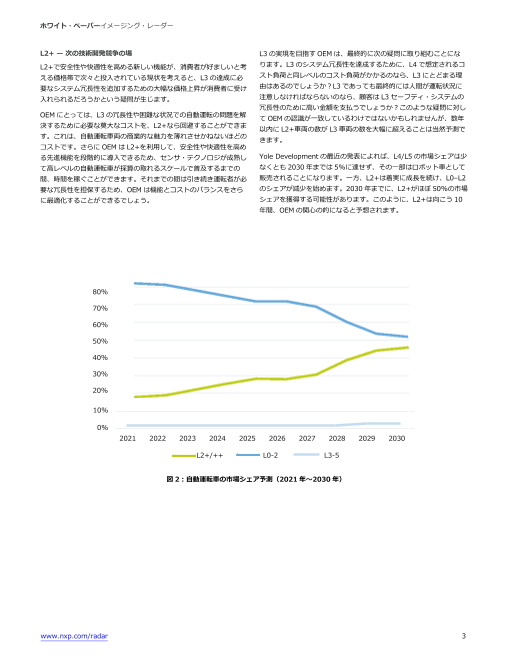
る先進機能を段階的に導入できるため、センサ・テクノロジが成熟し Yole Development の最近の発表によれば、L4/L5 の市場シェアは少
て高レベルの自動運転車が採算の取れるスケールで普及するまでの なくとも 2030 年までは 5%に達せず、その一部はロボット車として
間、時間を稼ぐことができます。それまでの間は引き続き運転者が必 販売されることになります。一方、L2+は着実に成長を続け、L0–L2
要な冗長性を担保するため、OEM は機能とコストのバランスをさら のシェアが減少を始めます。2030 年までに、L2+がほぼ 50%の市場
に最適化することができるでしょう。 シェアを獲得する可能性があります。このように、L2+は向こう 10
年間、OEM の関心の的になると予想されます。
80%
70%
60%
50%
40%
30%
20%
10%
0%
2021 2022 2023 2024 2025 2026 2027 2028 2029 2030
L2+/++ L0-2 L3-5
図 2:自動運転車の市場シェア予測(2021年~2030年)
www.nxp.com/radar 3
Page4
ホワイト・ペーパーイメージング・レーダー
3種類のレーダー、複数のソリューション ここ数年の間に、ソリッド・ステート式 LiDAR や MEMS LiDAR、
L2+車両における 4D イメージング・レーダーのメリットを十分に理 電子スキャン式 LiDAR など、新しい LiDAR テクノロジが登場してい
解できるよう、ADAS および AD を可能にする 3 つの主要なセンサ・ ます。このような新しいテクノロジは、サイズ、コスト、耐久性の点
テクノロジ、つまりカメラ、レーダー、LiDAR を包括的に分析して で、LiDAR が全体的に車載用途に「適した」ものにすることを目的
みましょう。結論から言えば、すべての用途を 1 つのセンサ・ソリ としています。このようなテクノロジは機械的な回転式 LiDAR を改
ューションでまかなうことはできません。それぞれに独自の強みと弱 善するものですが、まだ未熟なテクノロジであり、他の ADAS セン
みがあり、他の種類のセンサと組み合わせて欠点を補ったり、冗長性 サの成熟度に追いつくには時間が必要です。ただし、LiDAR がメイ
を持たせたりすることができます。 ンストリームの乗用車に広く普及するうえでの最大のハードルは、
依然としてコストです。OEM に対して最近行われた調査によれば、
言うまでもなく、カメラ・センサとレーダー・センサは現在でも
2021 年時点の小ボリュームでの LiDAR のコストは、カスケード接
既に広く普及しています。その理由は、どちらも成熟した低コス
続レーダー・トランシーバを 4 個搭載した 12-TX および 16-RX イ
トのテクノロジであること、この 2 つのテクノロジがおおむね相
メージング・レーダーの約 10 倍でした。LiDAR とレーダーのコスト
補的な特性を持つことにあります。LiDAR は原理的にカメラや
は長期的に下がっていくと予想されますが、LiDAR がある程度のボ
レーダーとの機能的な相補性がないため、この 2 種類のセンサが
リュームで高レベル自動運転車に搭載されるようになる 2030 年に
冗長レイヤとして使用されることになるでしょう。
なっても、LiDAR のコストはレーダーのコストの 2 倍に高止まりし
カメラ・センサ独自の RGB カラー情報を検知できる能力と、メガ たままでしょう。
ピクセル解像度と組み合わせることで、交通標識を「読み取る」こ
予測可能な未来を想定すると、今後も LiDAR は複雑な運転シナリオ
とができます。さらに、カメラ・センサによる物体の認識や分類の
で発生する困難な状況に対処するための、特別な性能を発揮する役割
精度向上は他の用途にも役立ちます。そのため、カメラ・センサは
を担うことになります。そのため、高いコストが許容される L4 およ
今後も欠かすことのできないセンサです。
び L5 の自動運転車については、必要な冗長性を達成するために
ただし、周囲の明るさが大きく変動する場合や、荒天時、過酷な路面 LiDAR が今後も重要な役割を果たすでしょう。
状況では、カメラ・テクノロジの効果と信頼性が損なわれます。矛盾
するようですが、車両のカメラ・レンズから雨滴や埃を自動的に取り 4D イメージング — レーダーの飛躍的進化
除くテクノロジが市場に投入されつつあります。しかし、このような レーダーは、各種センサの中でも速度と距離を高い精度で計測できる
メカニズムは部品コストの上昇を招き、さらに皮肉なことに、システ 点が優れています。LiDAR ではレーザ・ビームをまばらに対象
ム全体の安定性に影響するような機械的な脆弱性が増えることになり シーンに投射しますが、レーダーではシーン全体に均一に電波を投射
ます。 します。距離が長くなると、LiDAR では細く絞られたレーザ・
ビームの隙間にある小型のターゲットが完全に見落とされる可能性が
カメラ・センサによる距離測定と速度測定は、今後も非常に限定的
あります。そのため、長距離の検知に関してはレーダーの方がはるか
な機能のままでしょう。もちろん、ステレオ・カメラ構成に
に信頼性に優れたセンサです。レーダーの検知距離は年々強化されて
よって速度と深度推定を得ることはできますが、その精度は限定的
おり、将来的には 300 メートルを超える可能性があります。これ
です。ただし、この短所はレーダー・レイヤによって補完すること
は、カメラやほとんどの LiDAR センサで検知可能な距離をはるかに
ができます。
超えています。さらに、カメラ・センサや LiDAR センサと異なり、
LiDAR - 困難な状況下で優れた性能を発揮 レーダーは気象条件や明るさの状況に関係なく高い信頼性で機能しま
す。悪天候時に付着するゴミや雨滴による屈折も、レーダーの動作性
LiDAR の最も優れた特徴は、数十分の 1 度という非常に高い角度分
能を損なうことはありません。mmWave 周波数を使用するため、車
解能で水平角度と垂直角度を計測できることです。広範囲で高解像度
のバンパーのような絶縁性のある素材を透過して電波を照射でき、ま
を実現できるのは、非常に短い波長とパルスを利用しているからで
た電波を発射するための物理的な開口部も不要なため、耐久性とデザ
す。このような強みから、LiDAR は高解像度 3D マッピングに適して
イン性の両面で優れた選択肢と言えます。
おり、何もない空間や空間の境界、そして自車の位置を正確に検知す
る機能を実現できます。 レーダーの主な弱点は、色情報を収集できないことと、カメラ・セン
サや LiDAR センサと比較すると角度分解能が限られていることで
ただし、LiDAR にはカメラ・センサと共通する弱点がいくつかあり
す。しかし最近、4D イメージング・レーダーの進化によって角度分
ます。レーダー・センサと比較すると、速度を推定したり、遠く離れ
解能が大幅に改善されたことで、LiDAR との性能差が縮まってきま
た物体を検知したりする能力は極めて限定的です。さらに、LiDAR
した。自動運転レベル L5 につながる
は過酷な天候や路面状況の影響を受けやすいため、安定性やメンテナ
ンスの問題を解決するには大きなコストがかかります。
www.nxp.com/radar 4
Page5
ホワイト・ペーパーイメージング・レーダー
革新的なレーダー技術の新しい可能性を開くのが、4D イメージン 以上のような機能改善が実現したことで、レーダー・センサで初めて
グ・レーダーです。自動運転レベル L2+から最終的には完全自律走 高解像度の点群を出力できるようになりました。これにより、高い解
行車を目指すための、未来のセンサ・スイートを実現するうえで、 像度の環境マッピングと、最新の LiDAR に匹敵するシーン認識が可
4D イメージング・レーダーは主要な役割を果たすことになるでしょ 能になりました。さらに、レーダー・センサは LiDAR よりも大幅に
う。 コストが低いため、広範囲の大量導入に適しています。加えて、4D
イメージング・レーダーではマルチモード動作という独自の機能が新
4D イメージング・レーダーは従来型のレーダー・センサと異な
たに実現されました。これは、至近距離から最大 300 メートル遠方
り、空間的距離の算出に加えて、方位角および仰角方向の到来角度
まで、すべての距離で同時に複数の物体を検知できる能力です。
の算出にも対応します。さらに、従来型の車載レーダーの角度分解
能が 5~8 度であるのに対し、4D イメージング・レーダーは 4D イメージング・レーダーを搭載した車両では、従来型のレーダー
1 度未満の角度分解能を実現しています。 では対応できなかった状況に対応することができます。たとえば、
トンネルの中を安全に通過できそうなのか、走行車線に落ちている障
それを可能にするのが、大量の仮想チャネルを生成する MIMO
害物の上を安全に通過できるかなどを判断できます。このような高度
(Multiple Input Multiple Output) アンテナ・アレイです。仮想
な機能を備えた 4D イメージング・レーダーは、悪天候時や悪路走行
チャネルの数はレーダーの開口面の大きさに比例し、角度分解
時などにカメラや LiDAR センサの冗長機能、バックアップとして利
能に反比例します。仮想チャネルを増やすほど、角度分解能が
用できるという価値があります。
小さくなります。MIMO の開発が困難なのは、受信される
レーダー信号にアーチファクトや曖昧さが混入してしまうため 4D イメージング・レーダーを搭載することで、最大 300 メートル先
です。ただしこのようなアーチファクトや曖昧さは、高度な にある静止中/移動中の複数の物体を検知し、分離して、追跡するこ
MIMO 波形を使用することで軽減することができます。 とが可能になります。物体が隣接した位置にあっても問題ありませ
ん。この検知範囲は、カメラ・センサや LiDAR のそれを大きく超え
MIMO 波形の生成とアーチファクト軽減は、それだけでイノベー
ています。
ションが求められる分野です。NXP なら、一般的に使用される
MIMO 波形のやっかいな MIMO アーチファクトを軽減する、最新技 1 度未満の角度分解能、精密な距離測定と速度測定、
術によるソリューションをお客様にお届けできます。この高度な手法 最大 300 メートルの同時マルチモード検知を実現したレーダー・セ
は、基盤となる NXP レーダー・プロセッサと密接に結びついて設 ンサは、すべてのセンサ・タイプの中で最も長距離の検知に対応して
計、実装されるもので、ハードウェアとソフトウェアの連携した開発 います。レーダー・センサは環境条件の影響を受けにくい特性がある
による相乗効果を最大限にお客様に提供しています。 ことから、自動運転のレベルを問わず、汎用性と耐久性に優れた最も
基本的なセンシング方式となることが予想されます。
www.nxp.com/radar 5
Page6
ホワイト・ペーパーイメージング・レーダー
Short-range (up to 50m): Mid-range (50 .. 100m): Long-range (100 .. 300m):
• Enable autonomy in busy urban settings • Open country driving • High-speed highway driving scenarios
• High-density point cloud across wide field of view • Discern multiple objects and • Detection of objects up to 300m
• Detect many objects, precisely separate small ones interpret multi-object scenarios • Accurate sensing of speed for cruise control
next to large ones and reliably classify in real time
図 3:短距離、中距離、長距離に対応する同時トリプル・ビーム・マルチモード機能
困難なユース・ケース 冗長性を高めるために、LiDAR の搭載が必要になる可能性がありま
カメラ・センサとレーダー・センサは機能的に相補的な関係にあり、 す。しかしこれは販売価格の上昇につながり、同じような機能を備え
L1 から L5 までの幅広い自動運転レベルで利用されることになるで た L2+車両と比較すると、顧客にとっては価格に見合う魅力を感じ
しょう。L2 では、車両の横方向と長軸方向の制御を同時に行うため られないことが考えられます。そのため、市場に L4 および L5 が定
にセンサ・フュージョンが必要になります。L2+と L3 では、あらか 着する前の段階では、L3 車両の価値には疑問が残ります。
じめ決められた限定的な条件下で、L2 よりも非常に複雑かつタスク 一般道でのパイロット機能も、複雑なタスク指向ユース・ケースの好
指向のユース・ケースにシステムが独力で対応できるよう、車両の横 例と言えます。危険の多い一般道の環境は、高速道路でのパイロット
方向制御と長軸方向制御を複数組み合わせることが求められます。 機能のシナリオよりもはるかに複雑ですが、そこを最高 70 km/h で
わかりやすい例は、高速道路でのパイロット機能です。ODD(運行設 安全に走行するには、道路際から不意に車道を横断しようする歩行者
計領域)が十分に満たされていれば、自動的に最高 130km/h の速度 やペットに安全に道を譲ることができる必要があります。国によって
で走行し、車線変更を開始して、前方の速度の遅い車両を完全に追い は、時間帯に応じて車線数が自動的に 1 車線や 2 車線に変更される
越すことが求められます。この高度な機能を実現するには、安全な追 時間帯通行規制への対応も求められますが、これについては L5 で対
い越し操縦を確実に行うために、遠く離れた前方の状況を認識して可 応が可能になると考えられます。
能な限り早く危険を特定し、空いている空間を高い信頼性で認識し このユース・ケースについては、高精度での物体の認識と分類が欠か
て、隣接する車線上の自動車やオートバイとの間に安全な距離を確保 せませんし、非常に詳細な環境マッピング能力も必要です。L4 と L5
するという能力が必要になります。従来型のレーダーは検知距離が短 では運転者が車両の操作を引き継ぐ必要がないため、最後の手段とし
く、空いている空間を特定して安全な距離を確保するために必要な角 て車両を安全に停止できるようにするために、完全な冗長性がもはや
度分解能も劣るため、この要件を満たすことができません。 オプションではなく必須のものとなります。
L2+では、このような難しい操縦については必要に応じて運転者 この理由から、L4 および L5 の車両では 3 つの主要な車両センサ方
が担うことが想定されています。LiDAR によって追加される冗長 式であるカメラ、レーダー、LiDAR をすべて搭載し、センサ・
性レイヤは人間の運転者が既に担っているものと同じであるた スイートとして統合されることになると予想されます。高性能 4D イ
め、L2+レベルの設計ではコスト最適化の観点から除外される可 メージング・レーダー・センサによって、冗長性を確保するために車
能性があります。 両に複数の LiDAR を搭載することなく、L3 以上の安全基準を達成で
L3 では、システムが L2+車両よりも難しい状況を扱うことになり きることから、OEM はセンシングとプロセッシングのレイヤで野心
ます。最大 1 分の時間内に運転者が車両の制御を引き継ぐとして 的なコスト目標を達成できる可能性が高まるでしょう。
も、
www.nxp.com/radar 6
Page7
ホワイト・ペーパーイメージング・レーダー
まとめ
コスト面で実用性の高い 4D イメージング・レーダー・テクノロジが NXP が最近導入した高性能レーダー・プロセッサである S32R45
登場したことで、L2+以上の自動運転の実現を目的とした ADAS は、NXP の高性能レーダー信号プロセッシング IP に高度な
センサ・スイートが実現する可能性が高まります。これにより、L2+ 16nm FinFET CMOS テクノロジを組み合わせるという先進的なアプ
の幅広い安全快適機能が多数登場し、完全な L4/L5 自動運転への道 ローチによって、OEM が量産に適したコスト構造で L2+以上の自動
が開かれるでしょう。カメラ・センサ、レーダー・センサ、LiDAR 運転車向けの高度な 4D イメージング・レーダー機能を実現するため
センサにはそれぞれ強みと弱みがあり、それによって各自動運転レベ の、明快でコスト効率に優れた手段となります。詳細については、
ルにおける各センシング・テクノロジの役割と重要性が決まっていま www.nxp.com/S32R45 を参照してください。
す。特にレーダー・センサは最も基本的なセンサになりうる特徴を備
えており、補助的なセンサとして L2+と L3 ではカメラ、L4 と L5 で
はカメラと LiDAR が使用されます。
www.nxp.com/radar 7
Page8
お問い合わせ先
ホーム・ページ:www.nxp.com
Web サポート:http://www.nxp.com/support
米国/ヨーロッパ/記載されていないそれ以外の地域:
NXP Semiconductors USA, Inc.
Technical Information Center, EL516
2100 East Elliot Road
Tempe, Arizona 85284
+1-800-521-6274 or +1-480-768-2130
www.nxp.com/support
ヨーロッパ/中東/アフリカ:
NXP Semiconductors Germany GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (英語)
+46 8 52200080 (英語)
+49 89 92103 559 (ドイツ語)
+33 1 69 35 48 48 (フランス語)
www.nxp.com/support
日本:
NXP ジャパン
150-6024
東京都渋谷区
恵比寿 4-20-3
恵比寿ガーデンプレイス・タワー24 階
フリーダイヤル:0120-950-032
https://www.nxp.jp/support/
アジア/太平洋地域:
NXP Semiconductors Hong Kong Ltd.
Technical Information Center
2 Dai King Street
Tai Po Industrial Estate
Tai Po, N.T., Hong Kong
+800 2666 8080
support.asia@nxp.com
www.nxp.com
NXP および NXP のロゴは、NXP B.V. の商標です。その他の製品名またはサービス名はすべてそれぞれの所有者の財産です。
© 2021 NXP B.V.
ドキュメント番号: IMAGINGRADARWP REV 0