3Dスキャンの可能性
21世紀の成長を支えた2つの技術的ドライバ、コンピューティングと通信について考えてみましょう。
携帯性、品質、信頼性の融合により、これらは主流の技術になりました。コンピューターや携帯電
話で起こったことは、プロユースの3Dスキャンでも起きています。
過去10年間で、精度、速度、品質の飛躍的な進歩により、ポータブル3Dスキャンは、設計、エン
ジニアリング、製造、医療、文書の保存、文化財保護など、世界経済を牽引するほぼすべての
重要な業界で不可欠なツールになりました。
実際の
オブジェクト
このeBookでは、進化し続けるポータブル3Dスキャン
の世界をご紹介します。
• 進歩
3Dモデル • 携帯性の定義
• 位置決め方法
最後までお読みいただければ、お客様の特定のニーズに最適なソリューションについての理解が深まる
ことと思います。
小さなパッケージで大きなパフォーマンス
ひと昔前、ポータブル3Dスキャンシステムは、より大型の3Dスキャンシステムのパフォーマンスに到底
匹敵することができなかったものです。5年前でもそうだったかもしれません。しかし、もはやそうではあ
りません。
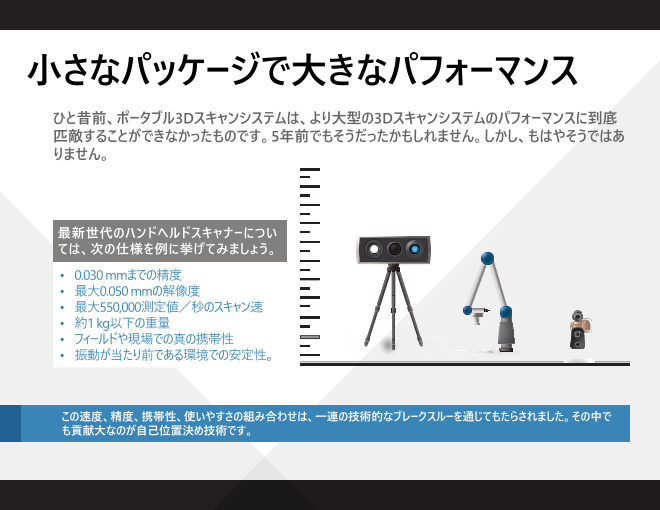
最新世代のハンドヘルドスキャナーについ
ては、次の仕様を例に挙げてみましょう。
• 0.030 mmまでの精度
• 最大0.050 mmの解像度
• 最大550,000測定値/秒のスキャン速
• 約1 kg以下の重量
• フィールドや現場での真の携帯性
• 振動が当たり前である環境での安定性。
この速度、精度、携帯性、使いやすさの組み合わせは、一連の技術的なブレークスルーを通じてもたらされました。その中で
も貢献大なのが自己位置決め技術です。
すべてを可能にする自己位置決め技術
自己位置決めは、スキャン対象のオブジェクトを位置基準として利用する画期的なイノベーションで
す。これは、アーム、CMM、トラッカーなどの外部位置決めデバイスを使用するのとは対照的です。
ターゲットによる 自然の特徴による
自己位置決め 自己位置決め
自己位置決めは、ポータブル3Dスキャンのアプリケーションの新しい世界を切り開き、真の携帯性とダイナミックリファレンス
(動的参照)の重要なメリットをもたらしました。
Page5
真の携帯性は、外部の位置決めデバイスを使用する必要がないため、コンパクトで軽量なスタンドアロンの3Dスキャナーを実現しています。この種のデバイスは、離れた場所に快適に移動でき、狭いスペースや不安定な環境で動作できます。��真の携帯性とは、専用の部屋、製造現場、または現場で複数のタイプのタスクを柔軟に実行できることも意味します。
外出先や社内での真の携帯性
現場で
真の携帯性は、外部の位置決めデバイスを使用す
る必要がないため、コンパクトで軽量なスタンドアロ
ンの3Dスキャナーを実現しています。この種のデバイ
スは、離れた場所に快適に移動でき、狭いスペース
や不安定な環境で動作できます。
真の携帯性とは、専用の部屋、製造現場、または
現場で複数のタイプのタスクを柔軟に実行できるこ
とも意味します。 フィールドで
最近の調査では、3Dスキャンユーザーにとっての携帯性の重要性が示されていま
す。
45% 43% 回答者は、以下の環境において、
携帯性が鍵になるとしています。
• 現場
のユーザーが3Dスキャナーを のユーザーがアームマウントまたは三脚 • 外での作業
購入する際の決定に最も影 ベースのシステムなどの他の構成ではな • 顧客またはサプライヤー先
響を与える3つの主な要因の く、なぜハンドヘルド3Dスキャナーを選択 • 不安定または制御されていない場所
1つとして、携帯性を挙げまし したのかという質問に対し、携帯性を一
た 番の理由に挙げました。
外出先や社内での真の携帯性
3Dスキャナーをどこにでも持ち運べる
だけでなく、携帯性は柔軟性ももたら
します。同じ調査では、参加者の しかし、それでも彼らは
50% 携帯性が彼らの
購入決定の主な要因
が専用の部屋、ラボ、スタジオでス
キャナーを使用していることがわかり であると言っています。
ました。
柔軟性は、3Dスキャンへの投資の最適化に直接関係します。
なぜなら、ユーザーは単一の搬送可能なスキャンシステムで幅広
いスキャンタスクを実行できるようになるからです。
スキャンできるオブジェクトの種類が多く、スキャンできる場所の
数が多いほど、投資収益率が高くなります。
ダイナミックリファレンシング(動的参照):
安定性が向上し、エラーが減少
自己位置決めのもう1つの重要な副産物は、ダイナミックリファレンシングです。ダイナミックリファレ
ンシングにより、参照システムは外部の固定参照ではなくオブジェクト自体に基づくことができます。
この小さいけれども重要な側面には、スキャンプロセスをより速く、より簡単に、より正確にすること
ができる多くの重要な利点があります。
ターゲットによる
ダイナミックリファレンシングの主な利点 自己位置決め
• 厳格なセットアップの必要性を排除します。
スキャン中にオブジェクトを自由に操作でき
ます
• 現場や製造現場など、振動が発生してい 自然の特徴による
る環境でのより正確な測定。 自己位置決め
• 経験の浅いユーザーによる間違いの削減
ポータブル3Dスキャナーの位置決め方法
多くの場合、ポータブル3Dスキャナーはサイズと形状が
似ていますが、それらが使用するさまざまな位置決め
方法は、パフォーマンスと使いやすさに重要な影響を ターゲットによる
与える可能性があります。 自己位置決め
次のセクションでは、ポータブル3Dスキャナーの2つの
主な位置決め方法について説明します
• ターゲットを使った自己位置決め 自然の特徴による
自己位置決め
• 自然の特徴(形状や色)による自己位置決め
• 2つを組み合わせた3番目の方法
(ハイブリッド自己位置決め)
最後までお読みいただければ、お客様の3Dスキャンの
ニーズに最適な位置決めシステムの種類についての理
解がより深まるでしょう。
ターゲットを使った自己位置決め
この方法では、たとえばターゲットに触れたり変更したりできない貴重な
アーティファクトの場合、オブジェクト上またはそのすぐ周囲に、スキャン前に
位置決めターゲットを配置します。ターゲットを使用すると、スキャナーで
取得した3Dデータセットのさまざまなカメラフレームをすべて登録できます。
ターゲットは通常、単純な幾何学的形状、多くの場合は円形で、3Dスキャ ターゲットによる
自己位置決め
ナーの光学コンポーネントで簡単に検出できるように特別に設計されていま
す。
スキャンする前に、スキャンするオ スキャナーがターゲットを個別に検 スキャナーがパーツの上を移
ブジェクトの専用アルゴリズムと 出した後、次のステップでそれらの 動すると、新しいターゲットが
予備記述子を取得するためのプ 相対位置と法線を決定します。 検出され、グローバルポジショ
リモデリングと呼ばれるプロセスが 3つ以上のターゲットを持つター ニングモデルに登録されます。
行われます。これら2つの項目に ゲットデータセットを使用して、ス
より、ターゲット検出がより簡単 キャンフレームを配置します。
かつ正確になります。
なぜターゲットを使って ターゲットを使った位置決めは、ポータブル3Dスキャナーが寸法検査の品質
位置決めするのか? を提供できる唯一の方法でした。これは、以前は測定アームスキャナーと固
定式の構造白色光3Dスキャナーに限定されていました。
自然の特徴による配置
(ジオメトリやカラーテクスチャ、あるいはその両方)
この方法は、オブジェクトの固有の特性(その形状とテクスチャ属
性)を使用して、スキャナーの配置を提供します。自然の特徴を使っ
た位置決めする場合、オブジェクトのスキャン中に表面の再構築がリ
アルタイムで行われます。
データが取得されると、スキャナーはスキャンされた領域の一部の形状 自然の特徴による
自己位置決め
とテクスチャーを検出し、将来の使用のためにそれらを登録します。
新しい各フレームを分析するとき、検出された特
徴は以前に登録された特徴と比較され、画像
を照合し、スキャンオブジェクトの位置を決定す また、スキャンオブジェクトの自然な特徴は、
るのに役立ちます。 スキャナーによって正確に検出されるのに十 この方法は柔軟性があり、プロジェクトに必
スキャナーには、強力な自動位置決め機能と、 分なほど目立つ必要があります。 要な時間を短縮するように見えるかもしれ
自然な機能を使用してそれ自体を位置決めす 最後に、単一フレームのデータの密度も、 ませんが、考慮しなければならない重要な
るための組み込み知能が必要です。 データを抽出するのに十分な高さである必 側面があります。
登録の調整またはフレームの修正には、次のフ 要があります。
レームをリアルタイムで予測する必要があります。
ターゲットの配置とは異なり、自然の特徴はオブジェクトごとに異なります。
なぜ自然の特徴を使って 結果の精度と正確さは、スキャンされるオブジェクトのタイプによって大きく
位置決めするのか? 影響を受ける可能性があります。ほとんどのオブジェクトには、少なくともい
くつかのサーフェスが含まれ、詳細はほとんど定義されません。
Page11
ターゲットと自然の特徴による位置決めを組み合わせて、ハイブリッド測位モードにすることができます。ユーザーは、ポジショニングターゲットを追加することにより、特定のオブジェクトまたは特定の領域の自然な特徴の欠如を補うことができます。��ハイブリッドポジショニングはいいとこどりのように見えますが、寸法検査レベルの結果は生成されません。ユーザーは、スキャンの絶対精度のタイプを保証するためにカバーする必要があるすべてのエリアをスキャンがカバーしていることを完全に確信することはできないのです。
ハイブリッドポジショニング
ターゲットと自然の特徴による位置決めを組み合わせて、ハイブリッド測位モードにする
ことができます。ユーザーは、ポジショニングターゲットを追加することにより、特定のオブ
ジェクトまたは特定の領域の自然な特徴の欠如を補うことができます。
ハイブリッドポジショニングはいいとこどりのように見えますが、寸法検査レベルの結果
は生成されません。ユーザーは、スキャンの絶対精度のタイプを保証するためにカバーす
る必要があるすべてのエリアをスキャンがカバーしていることを完全に確信することはでき
ないのです。
+ =
ターゲットによる 自然の特徴による ハイブリッド
自己位置決め 自己位置決め ポジショニング
Page12
このガイドは次の究極の質問に答えようとします。�私のニーズに最適なポータブル3Dスキャナーは何?
3Dスキャンのニーズと
位置決め方法の相性
このガイドは次の究極の質問に答えようとします。
私のニーズに最適なポータブル3Dスキャナーは何?
ここまでたどり着いたら、おそらく良いアイデアがあるでしょう。ここで再度、位置
決め方法と3Dスキャン要件の相性について以下にしめします。
オプション① オプション② オプション③
シンプルさ 柔軟性 精度
主な目標がスピードとシンプルさ アプリケーションに柔軟性が必要 一部のアプリケーションでは、ハ
である場合、自然な特徴の位 だが、高精度や計測グレードの解 イブリッドポジショニング方式を
置決め方法を使用する3Dス 像度は必要ない場合は、ハイブ 使用するスキャナーでは対応でき
キャナーがおそらく適しています。 リッドポジショニング方式が最適 ないレベルの精度または解像度
トレードオフは、精度の低下とス なソリューションです。 (ディテール)が必要です。
キャンオブジェクトの自然な特徴 これらの3Dスキャナーは、絶対的 これらのアプリケーションでは、位
の欠落の可能性です。これは、 な精度が要求されない工業製品 置決めターゲットを備えたハイエ
モデリングと修正に費やす時間 開発などのスキャンアプリケーショ ンドポータブルスキャナーの使用
が増えることを意味します。 ンに最適です。 をお勧めします。
ポータブル3Dスキャン:将来の可能性
3Dスキャンの主要な開発のほとんどは、10年足 3Dスキャンは、新しいアプリケーションを使用す
らずで行われました。ポータブル3Dスキャンは、 るより多くの組織で採用され続けており、ベン
未だ途方もない潜在能力を備えた非常に新し ダーはより小さなフォームファクターでより多くのコ
い分野です。 ンピューティング能力を提供し続けるため、毎日
ここでは、近い将来に期待できる開発のほ のように、ポータブル3Dスキャナーに新たな潜在
んの一部を紹介します。 的なブレークスルーがもたらされるでしょう。
この急速に発展するテクノロジーの進化にご期
待ください。
• 3Dスキャナーに統合されたより高度な機能と知能
• 低コスト化、高速化、高解像度化
• 使いやすさと自動化が向上し、誰もが3Dスキャン
の機能にアクセスできます
• 幅広いスキャンタスクと環境に対応する柔軟性の
向上
3Dスキャン用語集
3Dスキャナー 3Dモデルの構築など、デジタル世界で処理するための現実世界の環境の形状と色に関するデータ
をキャプチャするデバイス。
CAD コンピューター支援設計。設計、エンジニアリング、製造のためのデジタルモデルを作成する行為。モ
デルは、三角形、線、曲面などのさまざまな幾何学的エンティティに基づく。CADモードの一般的な
形式は、.stpと.lgs。
CAE コンピューター支援エンジニアリング。オブジェクトとアセンブリのパフォーマンスをデジタルでシミュレート
する行為。CAEには、有限要素解析(FEA)や計算流体力学(CFD)などのシミュレーションが
含まれる。
CAI コンピュータ支援検査。3Dスキャンを使用して、製造時の部品を、CADと同等または理想的な仕
様と比較し、品質管理、摩耗の評価、その他の形式の分析を行う。
CFD 計算流体力学。空気、水、ガスなどの流体が異なる設計、エンジニアリング、および自然環境下
でどのように動作するかをシミュレーションできるデジタルプロセス。
CMMアーム 関節式アームのポイントプローブまたはボールプローブを使用する座標測定機。ユーザーは、物理オブ
ジェクトから個々の3Dデータを収集できる。
CMMアームエ スケール上のインクリメンタルラインを検出して位置を決定する光電子デバイス。エンコーダーはリー
ンコーダ ダーヘッドとも呼ばれる。
CNCミリング コンピューター数値制御。複数の軸に沿って製品を作成して精度を向上させるコンピューター制御の
フライス盤。
3Dスキャン用語集
FEA 有限要素解析。オブジェクトまたはアセンブリの構造をさまざまな環境ストレス下でどのように実行
するかをシミュレーションできるデジタルプロセス。
NURBS 非一様有理Bスプライン。コンピュータグラフィックスとCADで曲線と曲面を生成するために使用され
る数学モデル。
STL ステレオリソグラフィーまたは標準テッセレーション言語の略。 3D Systems Inc.によって作成され、他
の多くのソフトウェアパッケージでサポートされているステレオリソグラフィCADソフトウェアにネイティブな
ファイル形式。STLファイルは、ラピッドプロトタイピングやコンピューター支援製造で広く使用されてい
る。
カスタマイズ製 3Dスキャンと補完的なソフトウェアを使用して、多種多様な設計の選択肢を妥当なコストで実現
造 する。マス・カスタマイズと呼ばれることもある。個々の生理機能に合わせて、人工装具、運動靴、
歯科用インプラントなどの医療およびスポーツ製品をカスタマイズする機能を説明するためにも使用
できる。
ダイナミックリ スキャナーが測定デバイスを光リンクで対象部品に継続的にロックすることを保証する機能により、
ファレンシング 工場および現場環境での精度を向上させる。
デジタルアーカ 物理オブジェクトのモデルをデジタル環境に保存する機能。時間と費用を節約する。
イブ
デジタル再構 物理オブジェクトをスキャンして、元の状態に近いか、または異なるスケールで再構築または改造す
成 る行為。
ラピッドプロト 3D STLまたはCADデータを使用して、アセンブリの物理部品のモデルをすばやく作成するプロセス。
タイピング 多くの場合、3Dスキャンはプロセスのフロントエンドであり、3Dプリントはバックエンドである。
3Dスキャン用語集
リバースエンジ デバイスの構造、機能、および動作の分析を通じて、デバイス、オブジェクト、またはシステムの技術
ニアリング 的側面を発見するプロセス。3Dスキャンでは、リバースエンジニアリングプロセスには、オブジェクトの
測定と3Dモデルとしての再構築が含まれる。
解像度 スキャンデータに表示され、ミリメートル(mm)で測定される詳細のレベルを定義するもの。ピクセ
ル数で定義される画面解像度と比較できる。る解像度が高いほど、メッシュファイル内の三角形の
数が増える。
繰返し精度 同じアイテムと同じ条件下で、1人の人物または機器が行った測定値の変動。
光学CMMス 光学CMMによって追跡される3Dスキャナー。光学CMMカメラは、3Dスキャナー自体とスキャン対象
キャナー のパーツに取り付けられたパッシブまたはアクティブリフレクターを追跡して、3D空間で動的に参照す
る。
三角形メッ 自動位置決め3Dスキャナーが出力するもの。測定条件と一貫性を考慮に入れて最適化された表
シュ 面からのメッシュである。これは、ポリゴンモデルとも呼ばれる。一般的な形式は、.stl、.obj、およ
び.sat。STLファイルは、ラピッドプロトタイピングやコンピューター支援検査などのアプリケーションに直
接使用したり、CADのNURBSサーフェスに変換したりできる。
三角測量 固定基線の両端の既知の点からの角度を測定することにより、点の位置を決定するプロセス。この
点は、1つの既知の辺と2つの既知の角度を持つ三角形の3番目の点として固定できる。
自動位置決 再帰反射ターゲットをリファレンスとして使用するレーザースキャンシステム。スキャン対象のオブジェク
め3Dレーザース トに対するスキャナーの位置は、スキャナーの2つのカメラと位置決めターゲットのパターン間の三角測
キャナー 量によって決定されるため、これらのスキャナーには外部位置決めシステムは必要ではない。データ取
得はリアルタイムになる。
3Dスキャン用語集
自動位置決 スキャナーは、スキャンされた部分の白色光パターンの歪みを見て、対象物に対する位置を取得する。
め3D白色光 これらのスキャナーは、パーツ上を移動するときに、リアルタイムで継続的に位置を取得する。
スキャナー
写真測量法 オブジェクトまたは環境の写真から高精度の測定値を抽出する方法。
精度 メッシュファイルの精度は、実部品と測定結果の偏差によって測定される。精度は、使用するスキャ
ナーの仕様とセットアップの品質によって異なる。3Dスキャンでは、精度は解像度とは異なる。
製品ライフサイ 製品の使用開始から耐用年数の終了までを監視および管理する方法。
クル管理
(PLM)
点群 座標系内のデータポイントのセット。3次元座標系では、これらの点は通常、定義されたXYZ座標
であり、オブジェクトの外部表面を表すことを目的とする。点群の一般的な形式は、.txt、.lgs、およ
び.ascii。
法線 3D空間では、面法線は、ポリゴンの2つの(平行でない)エッジのベクトル外積である。
見積請求、デモ依頼、サポート、修理・校正、
その他お問い合わせ
こちらのフォームからお問い合わせください。
アンリツ株式会社
環境計測カンパニー 営業本部
営業推進部 パートナーソリューションチーム
〒243-8885 神奈川県厚木市恩名5-1-1 [地図]
Tel: 046-296-6661
Fax: 046-225-8362
+HDG 2IÀFH &UHDIRUP 6KDQJKDL /WG. &UHDIRUP -DSDQ &RPSDQ¥ /LPLWHG(..)
5825, rue Saint-Georges 70# %XLOGLQJ,1R.1000 =KDQJ +HQJ 5RDG, ,·V %XLOGLQJ 6), 3-18-5 6KLQ-<RNRKDPD, .RXKRNX-NX,
/pYLV (4XpEHF) &DQDGD *69 4/2 =KDQJMLDQJ +LJK-7HFK.3XGRQJ 'LVWULFW. <RNRKDPD 222-0033 -DSDQ
6KDQJKDL 201210 &KLQD
LQIR#FUHDIRUP3G.FRP LVV-MDSDQ#FUHDIRUP3G.FRP
1 855 939 4446 FKLQD#FUHDIRUP3G.FRP +81 45 534 3728
+86 400 021 3328
$PHWHN ,QVWUXPHQWV ,QGLD 3YW/WG
www.creaform3d.com &UHDIRUP 'HXWVFKODQG * P E + ' / ) , 7RZHU $, 3UG )ORRU, 8QLW 1R 302-303,
0HLVHQZHJ 37 -DVROD, 1HZ 'HOKL ² 110 025
' -70771 /HLQIHOGHQ-(FKWHUGLQJHQ
LQGLD#FUHDIRUP3G.FRP
JHUPDQ¥#FUHDIRUP3G.FRP +91 11 40520163 / +91 11 40520164
+49 711 1856 8030
&UHDIRUP )UDQFH
24, UXH -HDQ-3LHUUH7LPEDXG
)RQWDLQH 38600 )UDQFH
IUDQFH#FUHDIRUP3G.FRP
+33 4 57 38 31 5
© Creaform Inc. 2015. All rights reserved.