



複数のプロセスにスマートなネジ締めソリューションを提供
OnRobot社よりscrewdriverが発売されました。
ユニバーサルロボットとの協働型工程用に適しています。
長さ最大35mmのねじは移動時に本ドライバー内に格納され、ねじの軸に過大な力が加えられた場合、
自動安全停止装置が起動します。
・本ドライバーの特徴
*サイズM1.6からM6まで、長さ最大45mmの磁気ねじに対応
*正確なトルク制御は、0.15Nmから5Nmまでに対応
*電子製品組立用としてESD認定
*迅速・容易で柔軟性の高い設定とプログラミング
*円滑な統合のため、各種ねじフィーダーを用意
*OnRobot OneSystemクイックチェンジャーによる簡単な設置
関連メディア
このカタログについて
| ドキュメント名 | 【新製品】ユニバーサルロボットに適したScrewdriver:OnRobot |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 940.5Kb |
| 登録カテゴリ | |
| 取り扱い企業 | ACS株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
データシート
SCREWDRIVER
V1.0
Page2
データシート
1 データシート
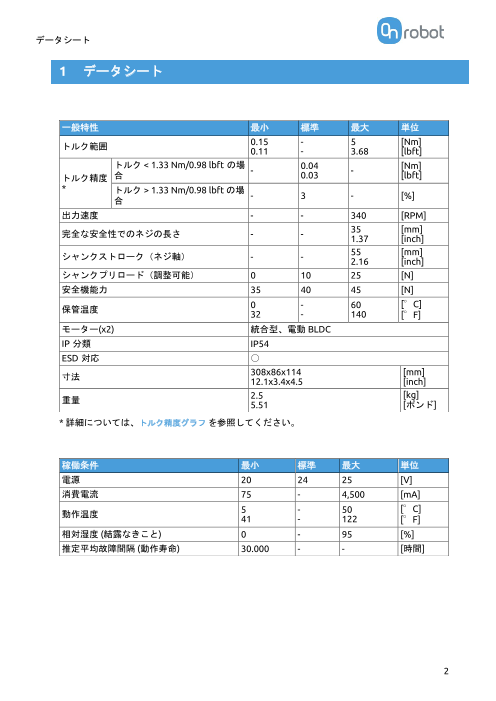
一般特性 最小 標準 最大 単位
0.15 - 5 [Nm]
トルク範囲
0.11 - 3.68 [lbft]
トルク < 1.33 Nm/0.98 lbft の場 0.04 [Nm]
- -
トルク精度 合 0.03 [lbft]
* トルク > 1.33 Nm/0.98 lbft の場
- 3 - [%]
合
出力速度 - - 340 [RPM]
35 [mm]
完全な安全性でのネジの長さ - -
1.37 [inch]
55 [mm]
シャンクストローク(ネジ軸) - -
2.16 [inch]
シャンクプリロード(調整可能) 0 10 25 [N]
安全機能力 35 40 45 [N]
保管温度
0 - 60 [°C]
32 - 140 [°F]
モーター(x2) 統合型、電動 BLDC
IP 分類 IP54
ESD 対応 ○
308x86x114 [mm]
寸法
12.1x3.4x4.5 [inch]
重量
2.5 [kg]
5.51 [ポンド]
* 詳細については、トルク精度グラフ を参照してください。
稼働条件 最小 標準 最大 単位
電源 20 24 25 [V]
消費電流 75 - 4,500 [mA]
[°C]
動作温度
5 - 50
41 - 122 [°F]
相対湿度 (結露なきこと) 0 - 95 [%]
推定平均故障間隔 (動作寿命) 30.000 - - [時間]
2
Page3
データシート
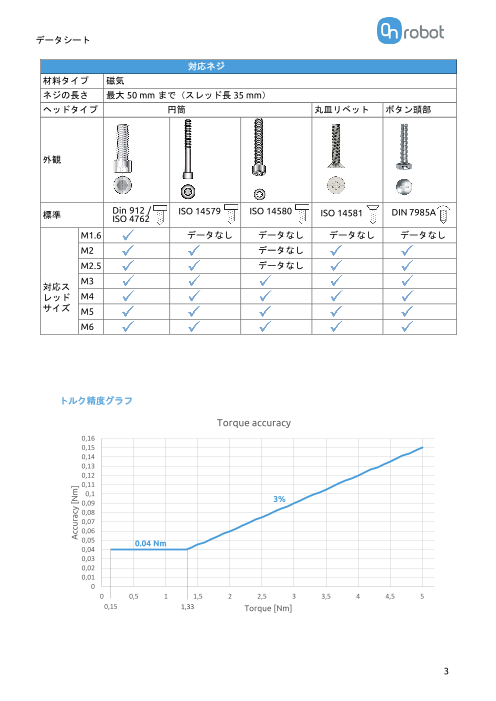
対応ネジ
材料タイプ 磁気
ネジの長さ 最大 50 mm まで(スレッド長 35 mm)
ヘッドタイプ 円筒 丸皿リベット ボタン頭部
外観
標準
Din 912 /
ISO 14579 ISO 14580 ISO 14581 DIN 7985A ISO 4762
M1.6 データなし データなし データなし データなし
M2 データなし
M2.5 データなし
M3
対応ス
レッド M4
サイズ M5
M6
トルク精度グラフ
Torque accuracy
0,16
0,15
0,14
0,13
0,12
0,11
0,1
0,09
3%
0,08
0,07
0,06
0,05
0.04 Nm
0,04
0,03
0,02
0,01
0
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5
0,15 1,33 Torque [Nm]
3
Accuracy [Nm]
Page4
データシート
スクリュービットシステム
このシステムにより、ネジを拾い、ビットを合わせ、ドライバーで移動させ、ネジを出し入れ
する効果が高くなります。そのため、高い成功率を維持するためには、スクリュービットシス
テムを正しく設定することを強くお勧めします。
ISO 14579 のネジのネジビットシステムの例。
ネジ
ネジ止め
ネジキャリア
ビット
ビットホ
ルダー
以下のセクションでは、スクリュービットシステムの構成要素の違いと、正しいセットアップ
方法について説明します。
その前に、次のページでは、ネジの種類やサイズによって必要なアイテムの概要をご紹介しま
す。
4
Page5
データシート
ネジの種類とサイズによって必要なもの
ネジの種類とサイズによって必要なもの
ヘッドタ
円筒 丸皿リベット ボタン頭部
イプ
標準ネジ
Din 912 /
ISO 14579 ISO 14580 ISO 14581 DIN 7985A ISO 4762
ネジサイ
ビットホルダー、ビット、クルーキャリア、ネジ止めが必要です。
ズ
S1.5
M1.6
データな データな
M1.6 M1.6 データなし データなし
し し
B
S1.5 T6
T6 PH1
M2 M2
M2 M2 M2
M2-3 M2-3 データなし
B B
A A
S2 T8
T8 PH1
M2.5 M2.5
M2.5 M2.5
M2.5 M2-3 M2-3 データなし
B B
A A
S2.5 T10 T10
T10 PH1
M3 M3 M3
M3 M3
M3 M2-3 M2-3 M2-3
A A
A A A
S3 T20 T20
T20 PH2
M4 M4 M4
M4 M4
M4 M4-6 M4-6 M4-6
A A
A A A
S4 T25 T25
T25 PH2
M5 M5 M5
M5 M5
M5 M4-6 M4-6 M4-6
A A A A A
S5 T30 T30
T30 PH3
M6 M6 M6
M6 M6
M6 M4-6 M4-6 M4-6
A A A A A
5
Page6
データシート
1.ネジ
まずは、どのようなネジが使われるのかを知ることから始めます。ネジの種類は、どのような
ビット、ネジキャリア、ネジ固定具(あれば)、およびビットホルダを使用するかを定義しま
す。
ドライバーに推奨されるネジの種類は、 対応ネジの表に記載されている特性を持つネジです。
2.ビットホルダー
ネジの種類とサイズに応じて必要なもの の表を参考に、ネジの種類とサイズに応じて、ネジビッ
トシステムの効果を最大限に発揮させるために適切なビットホルダーを選択してください。
ビットホルダーは磁力を発生させ、ネジをビットに密着させて整列させます。ビットホルダ A
は Bよりも高い磁力を発生させるため、ネジの小型軽量化にはビットホルダBを使用するのが
一般的です。
3.ビット
ネジの種類とサイズに応じて必要なものの表を参考に、ネジの種類とサイズに応じて、ネジビット
システムの効果を最大限に発揮させるために適切なビットホルダーを選択してください。
ビットには、これらのビットタイプとサイズを識別するための記号が付いています。
ビットサイズとタイプを表
標準ネジタイプ
示します。
Din 912 / ISO 4762 5
ISO 14579
ISO 14580 T-30
ISO 14581
DIN 7985A PH3
サポートされているビットシャンクのプロパティ:
• タイプ 1/4」 六角
• 長さ 25mm
注記:
25mm 以上の長さのビットを使用することができます。しかし、ネジキ
ャリアとネジ止めでは、ネジがきちんと固定されていない場合がありま
す。
6
Page7
データシート
4.ネジキャリアとネジ止め
ネジの種類とサイズに応じて必要なものの表を参考に、ネジの種類とサイズに応じて、ネジビット
システムの効果を最大限に発揮させるために適切なネジキャリアとネジ止めを選択してくださ
い。
ネジキャリアには、これらのねじタイプとサイズを識別するための記号が付いています。
ネジスレッドサイズ ネジタイプの図
ネジ止めは Din 912、ISO 4762、ISO 14579、ISO 14580 のネジタイプにのみ必要です。また、
ネジの止めは、対応するネジのサイズを示すための記号を持っています。
すべてのネジキャリアは、ネジビットシステムの高性能を確保するために調整する必要があり
ます。
外観 調整方法
7
Page8
データシート
ネジキャリアは、ネジおの頭部がネジキャリアに安定して座るように調整する必要があります
。下の写真を参考にしてみてください。
Din 912 / ISO 4762 / ISO 14581 DIN 7985A
ISO 14579 / ISO 14580
これができたら、ネジを外してネジ止めを押し込みます(Din 912、ISO 4762、ISO 14579、
ISO 14580 のネジタイプのみ)。
ネジを取り付けた状態での最終的なセットアップは以下の図のようになります。
Din 912 / ISO 4762 /
標準ネジ ISO 14581 DIN 7985A
ISO 14579 / ISO 14580
ネジビット
システム外
観
8
Page9
データシート
5.ドライバーへのネジビットシステムの着脱
最後に、下の写真のようにドライバーのシャンクの先端の内側にビットホルダーの六角形のも
のを入れて取り付けます。磁力でドライバーに取り付けられます。
ドライバーのシャンクからビットホルダーを取り外すには、以下の箇条書きに従ってください
。
1.ロボットまたはWeb Client のユーザーインターフェースを操作して、シャンクを 55 の
位置まで完全に移動させます。
2.下の画像のように、付属のキーを使ってビットホルダーを掴みます。
3.キーを押しながら、ロボットまたは Web クライアントのユーザーインターフェースを
操作して、シャンクを内側に移動させます。
9
Page10
データシート
コマンドを実行する際のドライバーの位置
ドライバーのコマンドをうまく実行するためには、ドライバーを正しく配置することが基本で
す。これは、以下の 2 つの条件を満たす場合に達成されます。
1.ネジビットシステムを、ネジまたはスレッドに完
全に合わせなければなりません。
2. ドライバーの底面から作用面までの距
離は、0~8mm の範囲内であること。
0-8 mm
LED - デバイスの状態
ドライバーにはデバイスの状態を示す LED が付いています。
色 デバイスの状態
点灯なし 電源未接続
安定した緑色 準備完了 - アイドル - 静的
緑色の点滅 初期化中
安定したオレンジ色 ビジー - シャンクの移動/回転
オレンジ色mp点
動作不良
滅
動作しない - ハードウェアの問
安定した赤色
題
赤の点滅 安全 - 緊急停止
10
Page11
データシート
トルク角曲線とトルク勾配
トルク勾配は、締め付けネジコマンドの最終段階でどのようにトルクがかかるかを示していま
す。これは、締め付けコマンドが正しく実行されたかどうかを検出するためのインジケータと
して使用することができます。
例えば、トルク勾配が異なる場合があります。
• 穴のスレッドの長さが足りない
• 穴のスレッドがネジのスレッドと異なる
• 穴のスレッドが清潔ではない(CNC 加工によるバリ取りなどが原因)
• ネジのスレッドと穴のスレッドの摩擦が低すぎたり高すぎたりする
• ネジ頭部と締め付け部品の摩擦が低すぎたり高すぎたりする
トルク勾配変数をロボットプログラムで確認できるようにしました。
下のグラフは正常なトルク/角度曲線を示しています。この場合は M4 ネジで 2.4Nm を目標ト
ルクとしています。
Torque angle curve
2,5
2
1,5
Torque
1
Gradient
0,5
0
1,5 2 2,5 3 3,5
Angle (rad)
11
Torque (Nm)
Page12
データシート
Screwdriver
寸法はすべて mm と[インチ]単位で表記されています。
12