


協働ロボットの安全性の検証に使用します。製品開発時の試験、およびロボットの始業前点検など現場での衝撃力の測定に適した測定器です。
測定対象により2タイプの機器があります。
・CBSF-75 Basic :衝撃力測定
・CBSF-75 Gripper :グリッパ部測定
このカタログについて
| ドキュメント名 | 【GTE/エクセル】協働ロボット衝撃力測定器 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.6Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社RYODEN (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
CBSF-75 Basic
CBSF-75 Gripper
協働ロボット衝撃力測 定器
概要:
協働ロボットとは安全柵を設けず人と協働して作業するロボットの
ことで、工場の生産ライン等の現場で使われる機会が増えてきてい
ます。協働ロボットは潜在的に人への衝突による衝撃を与えるリスク
を持っています。
2018年3月に中央労働災害防止協会が発行した「機能安全
活用実践マニュアル産業用ロボットシステム編」によれば、協働ロボ
ットの製造者、システムインテグレータ及び使用者は、リスクアセスメ
ントを実施し、衝撃力及び圧力の最大値を規格に適合させる努力 CBSF-75 Basic
義務があります。
図-1 ソフトウェア解析画面
衝撃力の規格はISO/TS 15066, TS B 0033で定められています。CBSF-75シリーズ
は現場で容易に衝撃力を測定ができ、下記の2つの力の測定に対応した小型軽量な測
定器です。
・力(Force) : 単位 [N]
・圧力(Pressure) : 単位 [N/㎠]
圧力測定を行うにはオプションの圧力測定フィルムを組み合わせ使用します。圧力測定
フィルムは、圧力の分布を色の濃淡で記録し専用のスキャナで読み取り、ソフトウェアで解
析をおこないます。
衝撃力測定結果 圧力測定結果
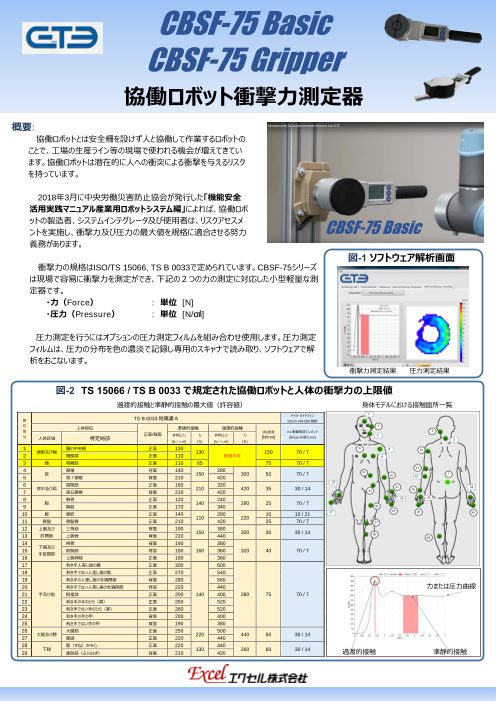
図-2 TS 15066 / TS B 0033 で規定された協働ロボットと人体の衝撃力の上限値
過渡的接触と準静的接触の最大値(許容値) 身体モデルにおける接触箇所一覧
ドイツ・ガイドライン
部 TS B 0033 附属書A
DGUV HM-080 規格
位
人体部位 準静的接触 過渡的接触
番 ばね定数 K1衝撃吸収エレメント
正面/背面 許容圧力 力 許容圧力 力
号 人体区域 特定局部 [N/mm] (Shore-A/厚さ mm)
[N/c㎡] [N] [N/c㎡] [N]
1 額の中央部 正面 130
頭部及び額 130 150 70 / 7
2 側頭部 正面 110 許容不可
3 顔 咀嚼筋 正面 110 65 75 70 / 7
4 頚椎 背面 140 280
首 150 300 50 70 / 7
5 第7頚椎 背面 210 420
6 肩関節 正面 160 320
背中及び肩 210 420 35 30 / 14
7 第五腰椎 背面 210 420
8 胸骨 正面 120 240
胸 140 280 25 70 / 7
9 胸筋 正面 170 340
10 腹 腹筋 正面 140 280 10 10 / 21
110 220
11 骨盤 骨盤骨 正面 210 420 25 70 / 7
12 上腕及び 三角筋 背面 190 380
150 300 30 30 / 14
13 肘関節 上腕骨 背面 220 440
14 橈骨 背面 190 380
下腕及び
15 前腕筋 背面 180 160 360 320 40 70 / 7
手首関節
16 上腕神経 正面 180 360
17 利き手人差し指の腹 正面 300 600
18 利き手でない人差し指の腹 正面 270 540
19 利き手の人差し指の末端関節 背面 280 560
20 利き手でない人差し指の末端関節 背面 220 440 力または圧力曲線
21 手及び指 拇指球 正面 200 140 400 280 75 70 / 7
22 利き手の手のひら(掌) 正面 260 520
23 利き手でない手のひら(掌) 正面 260 520
24 利き手の手の甲 背面 200 400
25 利き手でない手の甲 背面 190 380
26 大腿筋 正面 250 500
大腿及び膝 220 440 50 30 / 14
27 膝頭 正面 220 440
28 脛(すね)の中心 正面 220 440
下腿 130 260 60 30 / 14
29 脹脛筋(ふくらはぎ) 背面 210 420 過渡的接触 準静的接触
Page2
規格とガイドライン
◆ISO/TS15066 (日本での対応規格 TS B 0033) 規格で定められた衝撃力の条件
・過渡的接触(Transient)
人体部位がロボット可動部により衝突され、接触した身
過渡的接触 準静的接触
体位を挟み込みや捕捉されることなく、ロボットから跳ね返
る、又はひっこめることができる状況をいう。
・準静的接触(Static)
人体部位がロボットシステムの可動部と他のワークセルの
固定部若しくは可動部との間に補足された状態で挟み込
まれている、又は押しつぶされている状態をいう。
◆力と圧力
衝撃力は2つの数値で測定し評価します。 P(Transient) F(Transient) P(Static) F(Static)
・力(Force:頭文字のFで表します)
単位をニュートン[N]で表します。
質量 m[kg]の物体が衝突したときの加速度をa[m/s^2]
とすると以下の関係が成り立ちます。
F = m x a [N]
・圧力(Pressure:頭文字のPで表します)
単位面積当たりにかかる力のことです。
面積がS[㎠]の物体にF[N]の力が加わると、圧力P[N/
㎠]は以下の式で表されます。
P = F / S [N/㎠]
図-3 過渡的接触と準静的接触
◆K1圧力エレメントを追加した測定
ISO/TS 15066では体の部位毎にK2スプリングのばね定数が定義されています。衝撃力測定器の表面は硬い金属である為に、実際
の人体と違って衝撃力が大きく出る傾向があります。このため、より実際の人体に近い条件で測定するためのガイドラインをドイツのDGUV
で発行しています(注-1:)。
このガイドラインは、測定の際に衝撃吸収のためのK1圧力エレメントを使用することを指定しています。使用するK1圧力エレメントは体の
部位ごとに、その硬さがゴムの硬度(Shore A)で規定されています。
注-1: ガイドライン FB HM 080 Kollaborierende Robotersysteme Planung von Anlagen mit der Funktion “Leistungs- und Kraftbegrenzung”
圧力測定
プレスケール
K1圧力エレメント
K2 スプリング
衝撃力センサ
図-4 K1圧力エレメントを使用した測定
Page3
規格とガイドライン
協働ロボット衝 撃力測定器
◆機器の説明
協働ロボットの安全性の検証に使用します。製品開発時の試験、およびロボットの
始業前点検など現場での衝撃力の測定に適した測定器です。
測定対象により2タイプの機器があります。
CBSF-75 Basic :衝撃力測定 CBSF-75 Basic
CBSF-75 Gripper :グリッパ部測定
注:K2スプリングのばね定数は75N/mmで固定です。これは頭部を除く体の部位で一番硬いばね定数です。
◆仕様 グリッパ
CBSF-75 Basic CBSF-75 Gripper
内蔵充電池(2 x 1.2V NiMH バッテリー)
使用電源
USB ケーブルで充電可能
消費電流 20mA
PC インターフェイス USB
内部メモリ容量 100 測定
使用温度範囲 +10℃~ +30℃
許容相対湿度範囲 20~90%(結露なきこと)
衝撃センサ部の外形 80mmφ 20mm x 40mm
CBSF-75 Gripper
外形寸法 310 x 80 x 50(L x W x H) 370 x 105 x 90(L x W x H)
重量 1400g 1915g
測定範囲 20~500N 20~300N
確度 ±1% F.S.
最大測定誤差 ±3% F.S. ±5% F.S.
バネ定数 75N/mm
サンプリング時間 1ms 収納ケース
◆標準付属品
収納ケース USB接続ケーブル:機器の充電と PC との通信用
AC/DC アダプタ 校正証明書:メーカー発行
◆オプション
任意の方向で測定器を固定します。 固定マウント*1
固定マウント*1
*CBSF-75 Gripperは使用できません
ドイツのガイドライン FB HM-080 に準拠の K1 圧力エレメント
K1 圧力エレメント*2
(3 種類で1セット)マイクロファイバクロス付
*2
スキャナ(キャリブレーションエレメント付き) K1 圧力エレメント
CoboSafe 圧力測定システム
フジプレスケール圧力測定フィルム LLW
【CoboSafe-Scan】*3 【測定範囲:50~250N/㎠】(270mm幅 x 5m)
CoboSafe 圧力測定システム
専用収納ケース付き
【CoboSafe-Scan】*3
衝撃力、圧力の解析と報告書作成機能を持つソフトウェア
(測定データを PC に取り込む際に必要)
ソフトウェア
動作条件:OS Windows7以上 温湿度計*5
【CoboSafe-Vision】*4
ハードディスク空き容量 500Mbyte
Microsoft Office 2010 以降(報告書作成に Word が必要)
フジプレスケール LLW:50~250[N/㎠] (270mm幅 x 5m)
圧力測定フィルム
LW:250~1000[N/㎠] (270mm幅 x 5m)
フジプレスケール圧力測定フィルム使用時の温度、湿度の記録
温湿度計*5
ソフトウェア
用
【CoboSafe-Vision】*4
校正証明書
ISO/IEC17025 認定校正証明書
Page4
KDMG-STD2
測定用台車
◆概要
測定用台車KDMG-STD2 は、ISO/TS15066で規定された人体部位の衝撃力測定の際に人体を模擬する台車です。
この測定用台車に協働ロボット衝撃力測定器 CBSF-75 BasicやCoboSafeシリーズの測定器を固定し使用します。
◆特徴
台車の総重量は、おもりと組み合わせて凡そ人体の体重75kgとなります。(ISO/TS15066では人体の体重を75kgと規定しています。)
・ 協働ロボット衝撃力測定器を人体の部位に合わせて脹脛から頸までの任意の高さに固定することができます
・ ストッパ部(注:下記画像参照)は固定とフリーができます。
協働ロボットと人体の過渡的接触を模擬する場合には、ストッパ部をフリーにして衝突時に台車が動けるように使用します。
また協働ロボットと人体の準静的接触を模擬する場合には、ストッパ部を固定して衝突時に台車が動かないように使用します。
・ 天板部にもCBSF-75 Basic (F-500 Basic)、及びCoboSafeシリーズが取り付け可能です。*別途、固定マウントが必要です。
KDMG-STD2
センサ取り付け部可動可能
側面 正面
ISO/TS15066 で指定の部位
◆台車仕様
・ 外形 W:500 D:600 H:1600
天板部に CBSF-75 Basic を
・ 台車天板部地上高 800mm
固定した状況
・ 重量 約75kg (荷重用 20kgおもり2個含む) 注:背面ストッパ部
・ 測定器可動範囲(地上高) 220mm ~ 1475mm
・ 取り付け可能測定器 CBSF-75 Basic・CoboSafeシリーズ *別途、固定マウントが必要となります。
・ 付属品 荷重用 20kgおもり 2個 、 センサ取り付け用ねじ一式
・ 材質 SUS304
■製造元 測定器:GTE Industrieelektronik GmbH (ドイツ)
測定用台車 :KDMG-STD2 エクセル株式会社 (日本) 販売代理店
■日本総代理店
■本社
〒338-0001 埼玉県さいたま市中央区上落合 3-4-15
TEL:048(857)3541 FAX :048(857)3530
■大阪営業所
〒562-0041 大阪府箕面市桜 5-20-22 コスモス 102号
TEL:072(724)3777 FAX:072(724)6685
お問い合わせ:product@excelinc.co.jp
www.excelinc.co.jp
2020 年 1 月作成 R53