



ベルト蛇行検出・調整機器 電動調整キャリア
電動調整キャリアはモータの力を利用して強制的(自動)に蛇行を修正する装置です。
蛇行検出器が蛇行を検出するとモータで強制的にキャリアローラを旋回させ修正します。
可逆コンベヤ、定量フィーダにもご利用いただけます。
このカタログについて
| ドキュメント名 | 電動調整キャリア |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.5Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社マツシマメジャテック (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
■ 外形寸法 mm CHAB-106J
Apr. 2019 ベルト蛇行検出・調整機器
キャリア側取付駆動装置
検出装置 形式の説明
3-リード引出口
ケーブルサイズ (φ 8~φ 12)
L±10 (ベルト幅:1200mm以下) 160 340
φ6
0 HAB H
L±15 (ベルト幅:1350mm以上) CVVケーブル 1.25mm2×5c×5m
25
15
~ M: 本体 1 : 100 V
D : 検出器 2 : 200 V
C : 取付位置キャリア側 05 :トラフ角 5˚(リターン用のみ)
R : 取付位置リターン側 20 :トラフ角20˚
30 :トラフ角30
351 m±1 ベルト幅(単位 :
˚
cm) :トラフ角
ベルト蛇行検出・調整機器
45 45˚
W n 2-14×160 高さ調整用長穴 70
A b 125
2×2-15×25長穴 (ベルト幅:1350mm以下) 2×2- φ 14 取り付け穴
2×2-19×32長穴 (ベルト幅:1400mm以上) 電動調整キャリア
例) 形式: HAB-MC-105302H
ベルト幅: 1050mm、トラフ角: 30˚ 接続図(一方向コンベヤへの適用時)ホールド型
φ
質量 θ =30˚ 質量
形式 ベルト幅 d W A H T m n 形式 ベルト幅 a* b*
(kg) S* L* (kg) * : 内部配線中継用端子ですので接続不要です。 No.1 検出器
HAB-MC-050 2H 500 740 790 170 140 190 75 263 518 HAB-DC-050302H 500 106 207 13 * * 電動操作機 1kΩ (200Ω~1kΩ)
89.1 4.5 R1 T1
HAB-MC-060 2H 600 840 890 185 150 200 80 293 600 HAB-DC-060302H 600 136 216 14
G サ-マル 5芯ケ-ブル 3˚
HAB-MC-075 2H 750 1040 1090 85 344 756 HAB-DC-075302H 750 184 224 15 A1 1
207 51M 51M
HAB-MC-090 2H 900 114.3 1190 1240 6 160 210 90 369 893 HAB-DC-090302H 900 210 232 15 必ず接地してください。 後退限R 1 G 4 M A2 2
HAB-MC-100 2H 1000 1290 1340 237 95 431 998 HAB-DC-100302H 1000 227 237 16 ノイズにより機器破損の恐れあります。 3 Ω
HAB-MC-105 2H 1050 1340 1390 100 456 1053 HAB-DC-105302H 1050 275 238 16 S1 S1 200
2
HAB-MC-120 2H 1200 139.8 1490 1540 250 180 230 105 466 1190 HAB-DC-120302H 1200 299 245 17 ノイズ 1 S2 S2
HAB-MC-135 2H 1350 1640 1690 160 491 1326 HAB-DC-135302H 1350 321 251 17 フィルタ スペ-スヒ-タ ポジショナ 1
20W 7kΩ S3
HAB-MC-140 2H 1400 1730 1790 165 589 1414 HAB-DC-140302H 1400 412 272 18
9
HAB-MC-150 2H 1500 1830 1890 333 280 340 175 609 1523 HAB-DC-150302H 1500 417 290 18 2 No.2 検出器
HAB-MC-160 2H 1600 165.2 1930 1990 200 629 1633 HAB-DC-160302H 1600 441 281 18 T
2 3
3 1kΩ (200Ω~1kΩ)
HAB-MC-180 2H 1800 2220 2280 240 694 1824 HAB-DC-180302H 1800 523 333 19
363 330 390 6 3
HAB-MC-200 2H 2000 2420 2480 260 734 2042 HAB-DC-200302H 2000 533 342 20 S4 S1 200Ω
サ-マル 1 2
* : 本図はトラフ角30˚の寸法を示します。 トリップ信号
S2
* : 駆動機のS・L及び検出器のa・b寸法はトラフ角により異なります。 フィ-ドバック用 3 5 8 1ポテンショメ-タ S3 S3
1kΩ 2 7 4 A3 2
1 前進限 3˚
A4 1
5芯ケ-ブル
リターン側取付駆動装置
検出装置 88 (注) 1 自動復帰型も適用できます。
A コンベヤフレーム (納入品外) Uボルト 60 キャリア取付 リターン取付 2 破線のように操作機のA1−A2及びA3−A4間を短絡
W φ 60 No.2検出器 No.1検出器 すれば、ベルトの蛇行が修正され、検出器の偏位信号が160 340
タッチプーリ 15~25 零になった場合、操作モータが復帰動作をし、電動調整351
正転運転 正転運転 キャリア本体が中立位置に戻るタイプとなります。
取付位置
正転運転は、左図の様に電動操作機、検出器を取付けて
No.1検出器 No.2検出器 ください。
逆転運転は、No.1検出器とNo.2検出器の取付位置を
E CVVケーブル 1.25mm2×5c×5m 入れ替えてください。なお、検出器の向きはリード引出口がa HAB-MC形
m±1 コンベヤベルト コンベヤベルトの外側にくるように取付けてください。
L±10 (ベルト幅:1200mm以下)
L±15 (ベルト幅:1350mm以上) n コンベヤベルト
3-リード引出口
ケーブルサイズ ( φ 8~ φ12) 2×2-15×25長穴 (ベルト幅:1350mm以下)
2×2-
例) 形式:
19×32長穴 (ベルト幅:1400mm以上)
HAB-MR-105052H
ベルト幅: 1050mm
形式 ベルト幅 φ
質量 質量
d W A H E L T m n 形式 ベルト幅 H a
(kg) (kg) HAB-MR形
HAB-MR-050052H 500 740 790 270 592 140 190 60 HAB-DR-050052H 500 12
89.1 4.5 65 270
HAB-MR-060052H 600 840 890 300 651 150 200 65 HAB-DR-060052H 600 13
HAB-MR-075052H 750 1040 1090 125 370 797 70 HAB-DR-075052H 750 14 ご注意
HAB-MR-090052H 900
●本製品を正しく安全にご使用いただくため、「取扱説明書」をよくお読みください。
114.3 1190 1240 450 956 6 160 210 75 HAB-DR-090052H 900 53 14
- - 1000
記載内容は、お断りなく変更することがありますのでご了承ください。
●本製品を、人身に直接かかわる安全性を要求されるシステムに適用する可能性が
HAB MR 100052H 1290 1340 500 1056 80 HAB-DR-100052H 1000 14 ある場合には、当社営業窓口にご相談ください。
300 All Rights Reserved Copyright○C 2019, Matsushima Machinery Laboratory Co.,Ltd.
HAB-MR-105052H 1050 1340 1390 520 1094 90 HAB-DR-105052H 1050 14
HAB-MR-120052H 1200 139.8 1490 1540 600 1253 180 230 95 HAB-DR-120052H 1200 60 15 取 扱 店
HAB-MR-135052H 1350 1640 1690 670 1392 100 HAB-DR-135052H 1350 15
HAB-MR-140052H 1400 1730 1790 700 1450 105 HAB-DR-140052H 1400 15
150 9
HAB-MR-150052H 1500 1830 1890 750 1550 280 340 145 HAB-DR-150052H 1500 320 16
HAB-MR-160052H 1600 165.2 1930 1990 800 1649 150 HAB-DR-160052H 1600 78 16
検出器
HAB-MR-180052H 1800
HBVL-5 形
2220 2280 940 1938 215 HAB-DR-180052H 1800 16
330 390 365
HAB-MR-200052H 2000 2420 2480 1050 2157 235 HAB-DR-200052H 2000 16
https://www.matsushima-m-tech.com E-mail:sales@matsushima-m-tech.com
T
95
5˚
φ d
T
H±3 193 H
S
a
H
50
50 80 140
6
0˚ 50
50 8
03
90
θ
φ d
Page2
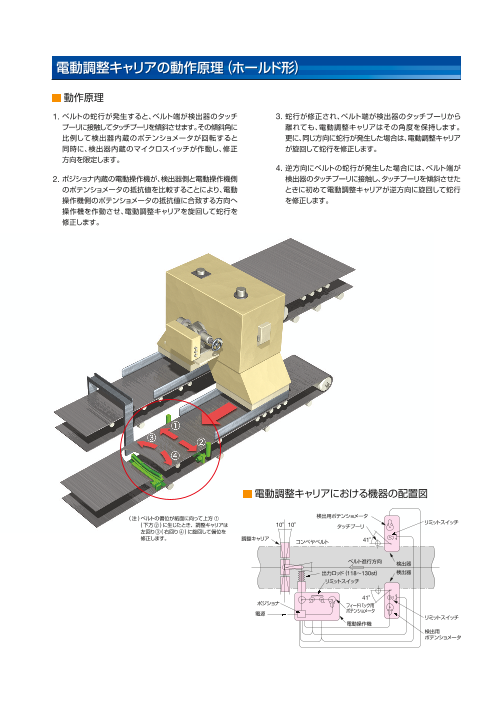
電動調整キャリアの動作原理 (ホールド形) アプリケーション例
動作原理 コンスタントフィードウェア
1. ベルトの蛇行が発生すると、ベルト端が検出器のタッチ 3. 蛇行が修正され、ベルト端が検出器のタッチプーリから (定量フィーダ)
プーリに接触してタッチプーリを傾斜させます。その傾斜角に 離れても、電動調整キャリアはその角度を保持します。
コンベヤベルトが蛇行した場合、 比例して検出器内蔵のポテンショメータが回転すると 更に、同じ方向に蛇行が発生した場合は、電動調整キャリア
製鉄所やセメント工場などでは、ホッパ下部に切出用として への原料付着、フレーム自体の歪などにより、短時間での
同時に、検出器内蔵のマイクロスイッチが作動し、修正 が旋回して蛇行を修正します。 定量切出フィーダが装着されています。これらのフィーダは 修正が常に必要となります。
運搬物の落下やベルトの破損が発生します。 方向を限定します。 平ベルトであり、運転や保全状態によっては蛇行が著しく、 これらの設備にも電動調整リターンが取り付けられて、
4. 逆方向にベルトの蛇行が発生した場合には、ベルト端が ベルト端がロードセルの検出アームに接触してベルトの ベルトの蛇行が正しく修正され、メンテナンス費用の軽減、
この蛇行を防ぐためには、調整を行う必要があります。 2. ポジショナ内蔵の電動操作機が、検出器側と電動操作機側 検出器のタッチプーリに接触し、タッチプーリを傾斜させた ミミ切れが発生します。これらの修正には運転中にテール 3K対策などに役立っています。
マツシマの電動調整キャリアは、 のポテンショメータの抵抗値を比較することにより、電動 ときに初めて電動調整キャリアが逆方向に旋回して蛇行 プーリの軸受の位置調整をするしかなく、湿度によるベルト操作機側のポテンショメータの抵抗値に合致する方向へ を修正します。
コンベヤベルトの蛇行を自動的に 操作機を作動させ、電動調整キャリアを旋回して蛇行を
修正します。
検出して補正するため、
保守時間および運転管理維持費の 配合ホッパ
定量フィーダコンベヤ
大幅削減に貢献します。
コンベヤスケール
検出器
特 長
電動調整キャリア(CFW用)
キャリア側取付
運搬物&ベルトを HAB-MC形 配合コンベヤ
守ります
運搬物の落下や破損が発生しません。
また、ベルトのミミ切れや
よじれによる損傷などもなく、
電動操作機 調整キャリア
項 目 仕 様 項 目 仕 様
ベルトの寿命が長くなります。 電動調整キャリアにおける機器の配置図 保護構造 IP55 適応ベルト幅 500mm~2000mm
許容温度 −10~+50˚C 適応コンベア速度 最大250m/min
支持方式 トラニオン支持形 トラフ角度* 20˚、30˚、45˚
設置 保守が
リターン側取付 ( 注 ) ベルトの偏位が紙面に向って上方 1 検出用ポテンショメータ
& HAB-MR形 ( 下方 2 ) に生じたとき、調整キャリアは 10˚ 10˚ リミットスイッチタッチプーリ 連結方式 二山クレビス形 最大作動角 ±10˚左回り 3 ( 右回り 4 ) に旋回して偏位を ストローク 常用118mm * :リターン側にはトラフ角度はありません。修正します。 調整キャリア
容易です コンベヤベルト
41˚ 速度 197/236mm/min (50/60Hz)
操作時間 36/30sec (50/60Hz)(常用ストローク時) 検出器
ベルト進行方向 検出器 推力 1.76kN (180kgf) 項 目 仕 様
電動調整キャリアのための 出力ロッド (118~130st)
検出器 ポジションリミットスイッチ 前進・後退限各1個 保護構造 IP67
リミットスイッチ ポテンショメータ 位置フィードバック用(1kΩ) 許容温度 −10~+50C̊
特別なスペースは必要ありません。 操作モータ リバーシブルモータ (40W 30分定格) タッチプーリ有効傾斜角 41˚
既設コンベヤに簡単に取り付けられ、 41˚ポジショナ フィードバック用 ポジショナ 無接点式 動作表示灯付き ポテンショメータ ベルト蛇行量検出用 (1kΩ)
過酷な周囲環境でも使用可能です。 電源 ポテンショメータ スペースヒータ 20W 7kΩ (内部結露防止用)リミットスイッチ ポジションリミットスイッチ 設定角度 3˚
また、ベルトの蛇行を自動調整するため、 電動操作機 サーマルリレー サーマルトリップ用接点信号付き 歯車比 3/1検出器 検出用 操作電源 200V (100V)50/60Hz CVVケーブル1.25mm2
人手で行っていた調整が不要となり、 - 形
ポテンショメータ
HBVL 5 接続ケーブル消費電力 65W 5芯 5m付き
ベルトの保守が容易になります。 H : ホールド型 ポテンショメータの出力は、検出用ですので外部出力はできません。
A : 自動復帰型
Page3
電動調整キャリアの動作原理 (ホールド形) アプリケーション例
動作原理 コンスタントフィードウェア
1. ベルトの蛇行が発生すると、ベルト端が検出器のタッチ 3. 蛇行が修正され、ベルト端が検出器のタッチプーリから (定量フィーダ)
プーリに接触してタッチプーリを傾斜させます。その傾斜角に 離れても、電動調整キャリアはその角度を保持します。
コンベヤベルトが蛇行した場合、 比例して検出器内蔵のポテンショメータが回転すると 更に、同じ方向に蛇行が発生した場合は、電動調整キャリア
製鉄所やセメント工場などでは、ホッパ下部に切出用として への原料付着、フレーム自体の歪などにより、短時間での
同時に、検出器内蔵のマイクロスイッチが作動し、修正 が旋回して蛇行を修正します。 定量切出フィーダが装着されています。これらのフィーダは 修正が常に必要となります。
運搬物の落下やベルトの破損が発生します。 方向を限定します。 平ベルトであり、運転や保全状態によっては蛇行が著しく、 これらの設備にも電動調整リターンが取り付けられて、
4. 逆方向にベルトの蛇行が発生した場合には、ベルト端が ベルト端がロードセルの検出アームに接触してベルトの ベルトの蛇行が正しく修正され、メンテナンス費用の軽減、
この蛇行を防ぐためには、調整を行う必要があります。 2. ポジショナ内蔵の電動操作機が、検出器側と電動操作機側 検出器のタッチプーリに接触し、タッチプーリを傾斜させた ミミ切れが発生します。これらの修正には運転中にテール 3K対策などに役立っています。
マツシマの電動調整キャリアは、 のポテンショメータの抵抗値を比較することにより、電動 ときに初めて電動調整キャリアが逆方向に旋回して蛇行 プーリの軸受の位置調整をするしかなく、湿度によるベルト操作機側のポテンショメータの抵抗値に合致する方向へ を修正します。
コンベヤベルトの蛇行を自動的に 操作機を作動させ、電動調整キャリアを旋回して蛇行を
修正します。
検出して補正するため、
保守時間および運転管理維持費の 配合ホッパ
定量フィーダコンベヤ
大幅削減に貢献します。
コンベヤスケール
検出器
特 長
電動調整キャリア(CFW用)
キャリア側取付
運搬物&ベルトを HAB-MC形 配合コンベヤ
守ります
運搬物の落下や破損が発生しません。
また、ベルトのミミ切れや
よじれによる損傷などもなく、
電動操作機 調整キャリア
項 目 仕 様 項 目 仕 様
ベルトの寿命が長くなります。 電動調整キャリアにおける機器の配置図 保護構造 IP55 適応ベルト幅 500mm~2000mm
許容温度 −10~+50˚C 適応コンベア速度 最大250m/min
支持方式 トラニオン支持形 トラフ角度* 20˚、30˚、45˚
設置 保守が
リターン側取付 ( 注 ) ベルトの偏位が紙面に向って上方 1 検出用ポテンショメータ
& HAB-MR形 ( 下方 2 ) に生じたとき、調整キャリアは 10˚ 10˚ リミットスイッチタッチプーリ 連結方式 二山クレビス形 最大作動角 ±10˚左回り 3 ( 右回り 4 ) に旋回して偏位を ストローク 常用118mm * :リターン側にはトラフ角度はありません。修正します。 調整キャリア
容易です コンベヤベルト
41˚ 速度 197/236mm/min (50/60Hz)
操作時間 36/30sec (50/60Hz)(常用ストローク時) 検出器
ベルト進行方向 検出器 推力 1.76kN (180kgf) 項 目 仕 様
電動調整キャリアのための 出力ロッド (118~130st)
検出器 ポジションリミットスイッチ 前進・後退限各1個 保護構造 IP67
リミットスイッチ ポテンショメータ 位置フィードバック用(1kΩ) 許容温度 −10~+50C̊
特別なスペースは必要ありません。 操作モータ リバーシブルモータ (40W 30分定格) タッチプーリ有効傾斜角 41˚
既設コンベヤに簡単に取り付けられ、 41˚ポジショナ フィードバック用 ポジショナ 無接点式 動作表示灯付き ポテンショメータ ベルト蛇行量検出用 (1kΩ)
過酷な周囲環境でも使用可能です。 電源 ポテンショメータ スペースヒータ 20W 7kΩ (内部結露防止用)リミットスイッチ ポジションリミットスイッチ 設定角度 3˚
また、ベルトの蛇行を自動調整するため、 電動操作機 サーマルリレー サーマルトリップ用接点信号付き 歯車比 3/1検出器 検出用 操作電源 200V (100V)50/60Hz CVVケーブル1.25mm2
人手で行っていた調整が不要となり、 - 形
ポテンショメータ
HBVL 5 接続ケーブル消費電力 65W 5芯 5m付き
ベルトの保守が容易になります。 H : ホールド型 ポテンショメータの出力は、検出用ですので外部出力はできません。
A : 自動復帰型
Page4
電動調整キャリアの動作原理 (ホールド形) アプリケーション例
動作原理 コンスタントフィードウェア
1. ベルトの蛇行が発生すると、ベルト端が検出器のタッチ 3. 蛇行が修正され、ベルト端が検出器のタッチプーリから (定量フィーダ)
プーリに接触してタッチプーリを傾斜させます。その傾斜角に 離れても、電動調整キャリアはその角度を保持します。
コンベヤベルトが蛇行した場合、 比例して検出器内蔵のポテンショメータが回転すると 更に、同じ方向に蛇行が発生した場合は、電動調整キャリア
製鉄所やセメント工場などでは、ホッパ下部に切出用として への原料付着、フレーム自体の歪などにより、短時間での
同時に、検出器内蔵のマイクロスイッチが作動し、修正 が旋回して蛇行を修正します。 定量切出フィーダが装着されています。これらのフィーダは 修正が常に必要となります。
運搬物の落下やベルトの破損が発生します。 方向を限定します。 平ベルトであり、運転や保全状態によっては蛇行が著しく、 これらの設備にも電動調整リターンが取り付けられて、
4. 逆方向にベルトの蛇行が発生した場合には、ベルト端が ベルト端がロードセルの検出アームに接触してベルトの ベルトの蛇行が正しく修正され、メンテナンス費用の軽減、
この蛇行を防ぐためには、調整を行う必要があります。 2. ポジショナ内蔵の電動操作機が、検出器側と電動操作機側 検出器のタッチプーリに接触し、タッチプーリを傾斜させた ミミ切れが発生します。これらの修正には運転中にテール 3K対策などに役立っています。
マツシマの電動調整キャリアは、 のポテンショメータの抵抗値を比較することにより、電動 ときに初めて電動調整キャリアが逆方向に旋回して蛇行 プーリの軸受の位置調整をするしかなく、湿度によるベルト操作機側のポテンショメータの抵抗値に合致する方向へ を修正します。
コンベヤベルトの蛇行を自動的に 操作機を作動させ、電動調整キャリアを旋回して蛇行を
修正します。
検出して補正するため、
保守時間および運転管理維持費の 配合ホッパ
定量フィーダコンベヤ
大幅削減に貢献します。
コンベヤスケール
検出器
特 長
電動調整キャリア(CFW用)
キャリア側取付
運搬物&ベルトを HAB-MC形 配合コンベヤ
守ります
運搬物の落下や破損が発生しません。
また、ベルトのミミ切れや
よじれによる損傷などもなく、
電動操作機 調整キャリア
項 目 仕 様 項 目 仕 様
ベルトの寿命が長くなります。 電動調整キャリアにおける機器の配置図 保護構造 IP55 適応ベルト幅 500mm~2000mm
許容温度 −10~+50˚C 適応コンベア速度 最大250m/min
支持方式 トラニオン支持形 トラフ角度* 20˚、30˚、45˚
設置 保守が
リターン側取付 ( 注 ) ベルトの偏位が紙面に向って上方 1 検出用ポテンショメータ
& HAB-MR形 ( 下方 2 ) に生じたとき、調整キャリアは 10˚ 10˚ リミットスイッチタッチプーリ 連結方式 二山クレビス形 最大作動角 ±10˚左回り 3 ( 右回り 4 ) に旋回して偏位を ストローク 常用118mm * :リターン側にはトラフ角度はありません。修正します。 調整キャリア
容易です コンベヤベルト
41˚ 速度 197/236mm/min (50/60Hz)
操作時間 36/30sec (50/60Hz)(常用ストローク時) 検出器
ベルト進行方向 検出器 推力 1.76kN (180kgf) 項 目 仕 様
電動調整キャリアのための 出力ロッド (118~130st)
検出器 ポジションリミットスイッチ 前進・後退限各1個 保護構造 IP67
リミットスイッチ ポテンショメータ 位置フィードバック用(1kΩ) 許容温度 −10~+50C̊
特別なスペースは必要ありません。 操作モータ リバーシブルモータ (40W 30分定格) タッチプーリ有効傾斜角 41˚
既設コンベヤに簡単に取り付けられ、 41˚ポジショナ フィードバック用 ポジショナ 無接点式 動作表示灯付き ポテンショメータ ベルト蛇行量検出用 (1kΩ)
過酷な周囲環境でも使用可能です。 電源 ポテンショメータ スペースヒータ 20W 7kΩ (内部結露防止用)リミットスイッチ ポジションリミットスイッチ 設定角度 3˚
また、ベルトの蛇行を自動調整するため、 電動操作機 サーマルリレー サーマルトリップ用接点信号付き 歯車比 3/1検出器 検出用 操作電源 200V (100V)50/60Hz CVVケーブル1.25mm2
人手で行っていた調整が不要となり、 - 形
ポテンショメータ
HBVL 5 接続ケーブル消費電力 65W 5芯 5m付き
ベルトの保守が容易になります。 H : ホールド型 ポテンショメータの出力は、検出用ですので外部出力はできません。
A : 自動復帰型
Page5
■ 外形寸法 mm CHAB-106J
Apr. 2019 ベルト蛇行検出・調整機器
キャリア側取付駆動装置
検出装置 形式の説明
3-リード引出口
ケーブルサイズ (φ 8~φ 12)
L±10 (ベルト幅:1200mm以下) 160 340
φ6
0 HAB H
L±15 (ベルト幅:1350mm以上) CVVケーブル 1.25mm2×5c×5m
25
15
~ M: 本体 1 : 100 V
D : 検出器 2 : 200 V
C : 取付位置キャリア側 05 :トラフ角 5˚(リターン用のみ)
R : 取付位置リターン側 20 :トラフ角20˚
30 :トラフ角30
351 m±1 ベルト幅(単位 :
˚
cm) :トラフ角
ベルト蛇行検出・調整機器
45 45˚
W n 2-14×160 高さ調整用長穴 70
A b 125
2×2-15×25長穴 (ベルト幅:1350mm以下) 2×2- φ 14 取り付け穴
2×2-19×32長穴 (ベルト幅:1400mm以上) 電動調整キャリア
例) 形式: HAB-MC-105302H
ベルト幅: 1050mm、トラフ角: 30˚ 接続図(一方向コンベヤへの適用時)ホールド型
φ
質量 θ =30˚ 質量
形式 ベルト幅 d W A H T m n 形式 ベルト幅 a* b*
(kg) S* L* (kg) * : 内部配線中継用端子ですので接続不要です。 No.1 検出器
HAB-MC-050 2H 500 740 790 170 140 190 75 263 518 HAB-DC-050302H 500 106 207 13 * * 電動操作機 1kΩ (200Ω~1kΩ)
89.1 4.5 R1 T1
HAB-MC-060 2H 600 840 890 185 150 200 80 293 600 HAB-DC-060302H 600 136 216 14
G サ-マル 5芯ケ-ブル 3˚
HAB-MC-075 2H 750 1040 1090 85 344 756 HAB-DC-075302H 750 184 224 15 A1 1
207 51M 51M
HAB-MC-090 2H 900 114.3 1190 1240 6 160 210 90 369 893 HAB-DC-090302H 900 210 232 15 必ず接地してください。 後退限R 1 G 4 M A2 2
HAB-MC-100 2H 1000 1290 1340 237 95 431 998 HAB-DC-100302H 1000 227 237 16 ノイズにより機器破損の恐れあります。 3 Ω
HAB-MC-105 2H 1050 1340 1390 100 456 1053 HAB-DC-105302H 1050 275 238 16 S1 S1 200
2
HAB-MC-120 2H 1200 139.8 1490 1540 250 180 230 105 466 1190 HAB-DC-120302H 1200 299 245 17 ノイズ 1 S2 S2
HAB-MC-135 2H 1350 1640 1690 160 491 1326 HAB-DC-135302H 1350 321 251 17 フィルタ スペ-スヒ-タ ポジショナ 1
20W 7kΩ S3
HAB-MC-140 2H 1400 1730 1790 165 589 1414 HAB-DC-140302H 1400 412 272 18
9
HAB-MC-150 2H 1500 1830 1890 333 280 340 175 609 1523 HAB-DC-150302H 1500 417 290 18 2 No.2 検出器
HAB-MC-160 2H 1600 165.2 1930 1990 200 629 1633 HAB-DC-160302H 1600 441 281 18 T
2 3
3 1kΩ (200Ω~1kΩ)
HAB-MC-180 2H 1800 2220 2280 240 694 1824 HAB-DC-180302H 1800 523 333 19
363 330 390 6 3
HAB-MC-200 2H 2000 2420 2480 260 734 2042 HAB-DC-200302H 2000 533 342 20 S4 S1 200Ω
サ-マル 1 2
* : 本図はトラフ角30˚の寸法を示します。 トリップ信号
S2
* : 駆動機のS・L及び検出器のa・b寸法はトラフ角により異なります。 フィ-ドバック用 3 5 8 1ポテンショメ-タ S3 S3
1kΩ 2 7 4 A3 2
1 前進限 3˚
A4 1
5芯ケ-ブル
リターン側取付駆動装置
検出装置 88 (注) 1 自動復帰型も適用できます。
A コンベヤフレーム (納入品外) Uボルト 60 キャリア取付 リターン取付 2 破線のように操作機のA1−A2及びA3−A4間を短絡
W φ 60 No.2検出器 No.1検出器 すれば、ベルトの蛇行が修正され、検出器の偏位信号が160 340
タッチプーリ 15~25 零になった場合、操作モータが復帰動作をし、電動調整351
正転運転 正転運転 キャリア本体が中立位置に戻るタイプとなります。
取付位置
正転運転は、左図の様に電動操作機、検出器を取付けて
No.1検出器 No.2検出器 ください。
逆転運転は、No.1検出器とNo.2検出器の取付位置を
E CVVケーブル 1.25mm2×5c×5m 入れ替えてください。なお、検出器の向きはリード引出口がa HAB-MC形
m±1 コンベヤベルト コンベヤベルトの外側にくるように取付けてください。
L±10 (ベルト幅:1200mm以下)
L±15 (ベルト幅:1350mm以上) n コンベヤベルト
3-リード引出口
ケーブルサイズ ( φ 8~ φ12) 2×2-15×25長穴 (ベルト幅:1350mm以下)
2×2-
例) 形式:
19×32長穴 (ベルト幅:1400mm以上)
HAB-MR-105052H
ベルト幅: 1050mm
形式 ベルト幅 φ
質量 質量
d W A H E L T m n 形式 ベルト幅 H a
(kg) (kg) HAB-MR形
HAB-MR-050052H 500 740 790 270 592 140 190 60 HAB-DR-050052H 500 12
89.1 4.5 65 270
HAB-MR-060052H 600 840 890 300 651 150 200 65 HAB-DR-060052H 600 13
HAB-MR-075052H 750 1040 1090 125 370 797 70 HAB-DR-075052H 750 14 ご注意
HAB-MR-090052H 900
●本製品を正しく安全にご使用いただくため、「取扱説明書」をよくお読みください。
114.3 1190 1240 450 956 6 160 210 75 HAB-DR-090052H 900 53 14
- - 1000
記載内容は、お断りなく変更することがありますのでご了承ください。
●本製品を、人身に直接かかわる安全性を要求されるシステムに適用する可能性が
HAB MR 100052H 1290 1340 500 1056 80 HAB-DR-100052H 1000 14 ある場合には、当社営業窓口にご相談ください。
300 All Rights Reserved Copyright○C 2019, Matsushima Machinery Laboratory Co.,Ltd.
HAB-MR-105052H 1050 1340 1390 520 1094 90 HAB-DR-105052H 1050 14
HAB-MR-120052H 1200 139.8 1490 1540 600 1253 180 230 95 HAB-DR-120052H 1200 60 15 取 扱 店
HAB-MR-135052H 1350 1640 1690 670 1392 100 HAB-DR-135052H 1350 15
HAB-MR-140052H 1400 1730 1790 700 1450 105 HAB-DR-140052H 1400 15
150 9
HAB-MR-150052H 1500 1830 1890 750 1550 280 340 145 HAB-DR-150052H 1500 320 16
HAB-MR-160052H 1600 165.2 1930 1990 800 1649 150 HAB-DR-160052H 1600 78 16
検出器
HAB-MR-180052H 1800
HBVL-5 形
2220 2280 940 1938 215 HAB-DR-180052H 1800 16
330 390 365
HAB-MR-200052H 2000 2420 2480 1050 2157 235 HAB-DR-200052H 2000 16
https://www.matsushima-m-tech.com E-mail:sales@matsushima-m-tech.com
T
95
5˚
φ d
T
H±3 193 H
S
a
H
50
50 80 140
6
0˚ 50
50 8
03
90
θ
φ d
Page6
■ 外形寸法 mm CHAB-106J
Apr. 2019 ベルト蛇行検出・調整機器
キャリア側取付駆動装置
検出装置 形式の説明
3-リード引出口
ケーブルサイズ (φ 8~φ 12)
L±10 (ベルト幅:1200mm以下) 160 340
φ6
0 HAB H
L±15 (ベルト幅:1350mm以上) CVVケーブル 1.25mm2×5c×5m
25
15
~ M: 本体 1 : 100 V
D : 検出器 2 : 200 V
C : 取付位置キャリア側 05 :トラフ角 5˚(リターン用のみ)
R : 取付位置リターン側 20 :トラフ角20˚
30 :トラフ角30
351 m±1 ベルト幅(単位 :
˚
cm) :トラフ角
ベルト蛇行検出・調整機器
45 45˚
W n 2-14×160 高さ調整用長穴 70
A b 125
2×2-15×25長穴 (ベルト幅:1350mm以下) 2×2- φ 14 取り付け穴
2×2-19×32長穴 (ベルト幅:1400mm以上) 電動調整キャリア
例) 形式: HAB-MC-105302H
ベルト幅: 1050mm、トラフ角: 30˚ 接続図(一方向コンベヤへの適用時)ホールド型
φ
質量 θ =30˚ 質量
形式 ベルト幅 d W A H T m n 形式 ベルト幅 a* b*
(kg) S* L* (kg) * : 内部配線中継用端子ですので接続不要です。 No.1 検出器
HAB-MC-050 2H 500 740 790 170 140 190 75 263 518 HAB-DC-050302H 500 106 207 13 * * 電動操作機 1kΩ (200Ω~1kΩ)
89.1 4.5 R1 T1
HAB-MC-060 2H 600 840 890 185 150 200 80 293 600 HAB-DC-060302H 600 136 216 14
G サ-マル 5芯ケ-ブル 3˚
HAB-MC-075 2H 750 1040 1090 85 344 756 HAB-DC-075302H 750 184 224 15 A1 1
207 51M 51M
HAB-MC-090 2H 900 114.3 1190 1240 6 160 210 90 369 893 HAB-DC-090302H 900 210 232 15 必ず接地してください。 後退限R 1 G 4 M A2 2
HAB-MC-100 2H 1000 1290 1340 237 95 431 998 HAB-DC-100302H 1000 227 237 16 ノイズにより機器破損の恐れあります。 3 Ω
HAB-MC-105 2H 1050 1340 1390 100 456 1053 HAB-DC-105302H 1050 275 238 16 S1 S1 200
2
HAB-MC-120 2H 1200 139.8 1490 1540 250 180 230 105 466 1190 HAB-DC-120302H 1200 299 245 17 ノイズ 1 S2 S2
HAB-MC-135 2H 1350 1640 1690 160 491 1326 HAB-DC-135302H 1350 321 251 17 フィルタ スペ-スヒ-タ ポジショナ 1
20W 7kΩ S3
HAB-MC-140 2H 1400 1730 1790 165 589 1414 HAB-DC-140302H 1400 412 272 18
9
HAB-MC-150 2H 1500 1830 1890 333 280 340 175 609 1523 HAB-DC-150302H 1500 417 290 18 2 No.2 検出器
HAB-MC-160 2H 1600 165.2 1930 1990 200 629 1633 HAB-DC-160302H 1600 441 281 18 T
2 3
3 1kΩ (200Ω~1kΩ)
HAB-MC-180 2H 1800 2220 2280 240 694 1824 HAB-DC-180302H 1800 523 333 19
363 330 390 6 3
HAB-MC-200 2H 2000 2420 2480 260 734 2042 HAB-DC-200302H 2000 533 342 20 S4 S1 200Ω
サ-マル 1 2
* : 本図はトラフ角30˚の寸法を示します。 トリップ信号
S2
* : 駆動機のS・L及び検出器のa・b寸法はトラフ角により異なります。 フィ-ドバック用 3 5 8 1ポテンショメ-タ S3 S3
1kΩ 2 7 4 A3 2
1 前進限 3˚
A4 1
5芯ケ-ブル
リターン側取付駆動装置
検出装置 88 (注) 1 自動復帰型も適用できます。
A コンベヤフレーム (納入品外) Uボルト 60 キャリア取付 リターン取付 2 破線のように操作機のA1−A2及びA3−A4間を短絡
W φ 60 No.2検出器 No.1検出器 すれば、ベルトの蛇行が修正され、検出器の偏位信号が160 340
タッチプーリ 15~25 零になった場合、操作モータが復帰動作をし、電動調整351
正転運転 正転運転 キャリア本体が中立位置に戻るタイプとなります。
取付位置
正転運転は、左図の様に電動操作機、検出器を取付けて
No.1検出器 No.2検出器 ください。
逆転運転は、No.1検出器とNo.2検出器の取付位置を
E CVVケーブル 1.25mm2×5c×5m 入れ替えてください。なお、検出器の向きはリード引出口がa HAB-MC形
m±1 コンベヤベルト コンベヤベルトの外側にくるように取付けてください。
L±10 (ベルト幅:1200mm以下)
L±15 (ベルト幅:1350mm以上) n コンベヤベルト
3-リード引出口
ケーブルサイズ ( φ 8~ φ12) 2×2-15×25長穴 (ベルト幅:1350mm以下)
2×2-
例) 形式:
19×32長穴 (ベルト幅:1400mm以上)
HAB-MR-105052H
ベルト幅: 1050mm
形式 ベルト幅 φ
質量 質量
d W A H E L T m n 形式 ベルト幅 H a
(kg) (kg) HAB-MR形
HAB-MR-050052H 500 740 790 270 592 140 190 60 HAB-DR-050052H 500 12
89.1 4.5 65 270
HAB-MR-060052H 600 840 890 300 651 150 200 65 HAB-DR-060052H 600 13
HAB-MR-075052H 750 1040 1090 125 370 797 70 HAB-DR-075052H 750 14 ご注意
HAB-MR-090052H 900
●本製品を正しく安全にご使用いただくため、「取扱説明書」をよくお読みください。
114.3 1190 1240 450 956 6 160 210 75 HAB-DR-090052H 900 53 14
- - 1000
記載内容は、お断りなく変更することがありますのでご了承ください。
●本製品を、人身に直接かかわる安全性を要求されるシステムに適用する可能性が
HAB MR 100052H 1290 1340 500 1056 80 HAB-DR-100052H 1000 14 ある場合には、当社営業窓口にご相談ください。
300 All Rights Reserved Copyright○C 2019, Matsushima Machinery Laboratory Co.,Ltd.
HAB-MR-105052H 1050 1340 1390 520 1094 90 HAB-DR-105052H 1050 14
HAB-MR-120052H 1200 139.8 1490 1540 600 1253 180 230 95 HAB-DR-120052H 1200 60 15 取 扱 店
HAB-MR-135052H 1350 1640 1690 670 1392 100 HAB-DR-135052H 1350 15
HAB-MR-140052H 1400 1730 1790 700 1450 105 HAB-DR-140052H 1400 15
150 9
HAB-MR-150052H 1500 1830 1890 750 1550 280 340 145 HAB-DR-150052H 1500 320 16
HAB-MR-160052H 1600 165.2 1930 1990 800 1649 150 HAB-DR-160052H 1600 78 16
検出器
HAB-MR-180052H 1800
HBVL-5 形
2220 2280 940 1938 215 HAB-DR-180052H 1800 16
330 390 365
HAB-MR-200052H 2000 2420 2480 1050 2157 235 HAB-DR-200052H 2000 16
https://www.matsushima-m-tech.com E-mail:sales@matsushima-m-tech.com
T
95
5˚
φ d
T
H±3 193 H
S
a
H
50
50 80 140
6
0˚ 50
50 8
03
90
θ
φ d