



IPMギアモータの位置制御タイプ、速度制御タイプについて掲載しています。
このカタログについて
| ドキュメント名 | IPMギアモータ 制御部仕様 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.4Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社ニッセイ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
制御部仕様
制御部仕様 IPM GEAR MOTOR
位置制御タイプ
Control Unit Specification P.732 専用インバータ概要
P.740 オペレータ機能
P.742 パラメータ一覧
P.748 設定一覧
P.751 ラダープログラム例
P.762 周辺機器
速度制御タイプ
P.767 専用インバータ概要
P.773 パネル機能
P.775 パラメータ一覧
P.783 入出力端子機能一覧
P.785 チャート図
P.790 周辺機器
731
Page2
専用インバータ概要
専用インバータ概要
IPMギアモータ位置制御タイプインバータ型式
モータ容量 位置制御タイプインバータ型式
0.1kW CIMR-CN2A0001AAA
0.2kW CIMR-CN2A0002AAA
0.4kW CIMR-CN2A0003AAA
0.75kW CIMR-CN2A0005AAA
1.5kW CIMR-CN2A0008AAA
2.2kW CIMR-CN2A0011AAA
ニッセイ仕様C1000インバータは、当社製IPMギアモータでの位置制御運転用に、安川電機製C1000インバータを調整して出荷して
重要 います。
そのためインバータ購入時に同梱されているC1000テクニカルマニュアル記載事項と異なる点がありますのでご注意願います。
詳細は、インバータ購入時に同梱されている小紙(黄色)を参照してください。
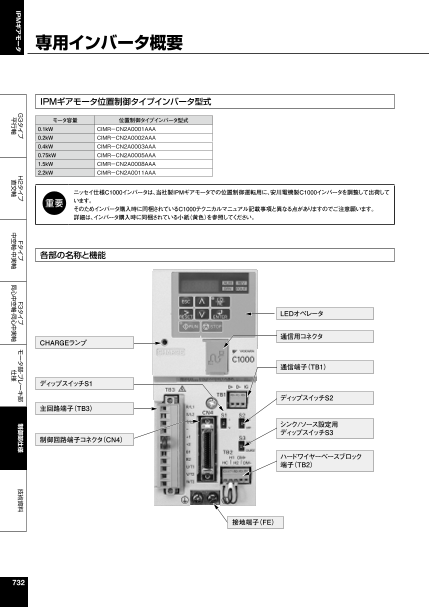
各部の名称と機能
LEDオペレータ
通信用コネクタ
CHARGEランプ
通信端子(TB1)
ディップスイッチS1
ディップスイッチS2
主回路端子(TB3)
シンク/ソース設定用
ディップスイッチS3
制御回路端子コネクタ(CN4)
ハードワイヤーベースブロック
端子(TB2)
接地端子(FE)
732
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page3
位置制御タイプ
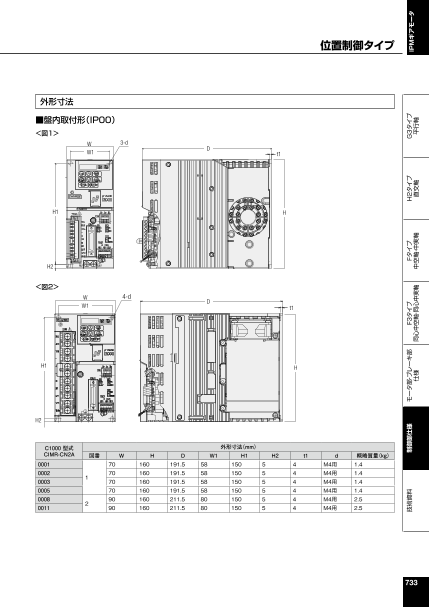
外形寸法
■盤内取付形(IP00)
<図1>
W 3-d
D
W1 t1
H1 H
H2
<図2>
W 4-d
D
W1 t1
H1 H
H2
C1000 型式 外形寸法(mm)
CIMR-CN2A 図番 W H D W1 H1 H2 t1 d 概略質量(kg)
0001 70 160 191.5 58 150 5 4 M4用 1.4
0002 70 160 191.5 58 150 5 4 M4用 1.4
1
0003 70 160 191.5 58 150 5 4 M4用 1.4
0005 70 160 191.5 58 150 5 4 M4用 1.4
0008 90 160 211.5 80 150 5 4 M4用 2.5
2
0011 90 160 211.5 80 150 5 4 M4用 2.5
733
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
Page4
仕様
項 目 仕 様
型式:CIMR-CN2A 0001 0002 0003 0005 0008 0011
最大適用モータ容量(kW) 0.1 0.2 0.4 0.75 1.5 2.2
入力 定格入力電流(A()注1) 0.7 1.5 2.9 5.8 7.5 11
定格出力容量(kVA()注2) 0.3(注3) 0.6(注3) 1.2(注4) 1.9(注4) 3(注4) 4.2(注4)
定格出力電流(A) 0.8(注3) 1.6(注3) 3.2(注4) 5.0(注4) 8.0(注4) 11.0(注4)
出
力 過負荷耐量 定格:定格出力電流の150% 60秒
(繰り返し負荷のかかる用途では、ディレーティングが必要です)
キャリア周波数 1~15kHz(注5)
最大出力電圧(V) 三相200~240V(入力電圧対応) (注6)
定格電圧・定格周波数 AC:三相200~240V 50/60Hz (注6) DC:270~340V
電 許容電圧変動 -15~10%
源 許容周波数変動 ±5%
電源設備容量(kVA) 0.3 0.7 1.3 2.2 4.1 5.8
設置場所 屋内
周囲温度 -10 ~ 50℃(盤内取付形)
湿度 95RH%以下(ただし結露しないこと)
環 保存温度 -20~60℃(輸送期間などの短期間温度)
境 標高 1000m以下
振動 10~20Hz未満では、9.8 m/s2
20~55Hz未満では、5.9 m/s2
C1000インバータとIPMギアモータ間の
配線距離 50m以内
保護構造 盤内取付形(IP00)
注1. 定格出力電流時の値を示します。なお、定格入力電流の値は、電源トランス、入力側リアクトル、配線条件を含む電源側のインピーダンスによって変動します。
注2. 定格出力容量は、220Vの定格出力電圧で計算しています。
注3. キャリア周波数10kHz時の値です。キャリア周波数を上げる場合は、電流の低減が必要です。
注4. キャリア周波数8kHz時の値です。キャリア周波数を上げる場合は、電流の低減が必要です。
注5. パラメータにより変更できます。IPMギアモータとの組合せ時、2~12kHzになります。
注6. IPMギアモータのモータ部の電源電圧定格は200~230Vです。240Vでのご使用はお問い合わせください。
734
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page5
位置制御タイプ
主な機能
C1000インバータでは、エンコーダまたはPGを使用せずに位置決め制御を行うため、以下の内容がサーボと異なるので、注意してくだ
重要 さい。
● 電源遮断、及び運転中にC1000の出力を遮断(ベースブロック)すると、C1000内部の位置情報がリセットされます。このため、電源
投入時、及びC1000の出力遮断後は、必ず外部で原点復帰してから位置決め制御を行うシーケンスにしてください。
●エンコーダまたはPGを使用していないため、位置に関する機械的な保護を、必ず外部で行ってください。
●電源投入直後に運転を開始した場合、モータの振動が大きくなる可能性があります。
電源投入後一定の時間をおいて運転を開始してください。(目安: 30秒以上)
項目 内容
制御方式 PM用PGなしアドバンスドベクトル制御
周波数制御範囲 0.01~400Hz
周波数精度(温度変動) デジタル指令: 最高出力周波数の±0.01%以内(-10~+40℃)
アナログ指令: 最高出力周波数の±0.1%以内(25℃±10℃)
周波数設定分解能 デジタル指令: 1Hz
アナログ指令: 1Hz
周波数設定信号 0~10V、4~20mA、パルス列入力
始動トルク 150%/0 r/min
トルク制限 あり(4象限個別に設定可能)
加減速時間 0.00~6000.0秒(加速・減速を個別に設定:4種類切り替え)
制 入力可能信号:オープンコレクタ、ラインドライバ
御
機 位置指令方法 ①符号+パルス列(正論理)
②CW+CCW(正論理)
能 ③90°位相差二相パルス(4倍)
モータ1回転のパルス数 0.1~0.4kW:2048パルス、0.75~2.2kW:3072パルス
電子ギア 入力指令1パルスあたりのモータの回転量を任意に設定可能
停止精度 0.1~0.4kW:±5(°機械角)、0.75~2.2kW:±3.3(°機械角)
約20%(制動オプションを使用して約125%)
①短時間平均減速トルク: モータ容量0.4/0.75kW:100%以上
制動トルク モータ容量1.5kW: 50%以上
モータ容量2.2kW: 20%以上
②連続回生トルク: 約20%(制動オプション接続で約125%、10%ED、10秒)
位置制御、速度制御、瞬時停電再始動、速度サーチ、過トルク検出、トルク制限、17段速度運転(最大)、加減速切り替え、
主な制御機能 3ワイヤシーケンス、周波数指令上下限設定、PID制御(スリープ機能付き)、MEMOBUS 通信(RS-485 最大115.2
kbps 最大31台接続可能)、異常リトライ、過電圧抑制機能など
多機能接点入力 8点:運転指令(2ワイヤシーケンス2)、クリア入力信号、外部異常、異常リセット、正転側駆動禁止、逆転側駆動禁止、
( 正転運転、逆転運転、多段速指令1~4、加減速時間選択1・2、ベースブロック指令、非常停止など
注入 多機能アナログ入力 2点:主速周波数指令、加減速時間ゲイン、トルクリミット、過トルク/アンダトルク検出レベルなど
1 出
)力 多機能接点出力 4点:位置決め完了、運転中、異常、過トルク/アンダトルク検出、速度一致、回転角同期信号、トルクリミット中など
多機能アナログ出力 1点:出力電流、モータ速度、出力電力、トルク指令(内部)など
表 モニタ表示 周波数指令、出力電流、モータ速度、主回路直流電圧、出力電力、トルク指令(内部)、入出力端子の状態、MEMOBUS通
示 信エラーコードなど
機
LEDランプ表示 異常検出時、軽故障検出時・oPE(オペレーションエラー)検出時・正転/逆転指令入力中、ドライブモード時・オートチューニ
能 ング時、DriveWorksEZを使用時など
保護機能 モータ保護、瞬時過電流保護、過負荷保護、過電圧保護、低電圧保護、瞬時停電補償、ヒートシンク過熱保護、制動抵抗
過熱保護、ストール防止、地絡保護、充電中表示
注1. 多機能接点入出力、多機能アナログ入出力はパラメータにより、項目の選択が可能です。
735
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
Page6
標準接続図
-,+1,+2,B1,B2は DCリアクトル
オプション接続用端子です。 (オプション()注1) 制動抵抗器
交流電源を接続しないでください。
C1000の異常を多機能出力で, U X (オプション)
短絡片
電源側を遮断するシーケンスを 2MCCB
組むことを推奨します。 r1
s1
t1 TB3 +2 +1 - B1 B2 TB3
ELCB (MCCB) ヒューズ
三相電源 R MC R/L1 主回路 U/T1 U
200~240 V S S/L2 V/T2 V M
50/60 Hz T T/L3 C1000 W/T3 W
(注6)
(注7)
制御回路
運転指令 CN4 (D種接地)
(サーボオン) 1 S1
クリア入力信号 2 S2
外部異常 3 S3
異常リセット 4 S4
多機能接点入力 正転側駆動禁止 19 S5
(出荷時設定)
逆転側駆動禁止 20 S6
注意!
S5,S6がオフ(開)の状態で電源を スルーモード 21 S7
投入しますとアラーム※が発生します。
S5,S6はオン(閉)の状態で電源を シンク/ソース設定用
スルーモード 22 S8
投入してください。 ディップスイッチS3(注2)
※アラーム時のオペレータ表示 SINK
「P-oT」:正転駆動禁止 +24 V
「n-oT」:逆転駆動禁止 23 SC SOURCE
被覆接続用端子
CN4
13 +V周波数設定用電源(注3)
+10.5 V Max 20 mA CN4
0~+10V 14 多 2kΩ A1 機能アナログ入力 1 7
[出荷時設定:主速周波数指令] ディップスイッチS1 P1
多機能ホトカプラ出力1
周波数 4~20mA 15 0 ~ +10 V (20 kΩ) I C1 8 DC48 V 50 mA 以下
主速周波数指令 A2 多機能アナログ入力 2
設定器 [出荷時設定: P2 9 [出荷時設定:位置決め完了]
主速周波数指令に加算] V 多機能ホトカプラ出力2
0 ~ +10 V (20 kΩ) または C2 10 DC48 V 50 mA 以下
4~20 mA (250 Ω) [出荷時設定:運転中]
P3 26
32 多機能ホトカプラ出力3
AC DC48 V 50 mA 以下
C3 27
0 V [出荷時設定:異常(反転出力)]
位置指令パルス入力 17 A+ P4 28 多機能ホトカプラ出力4
入力可能信号 DC48 V 50 mA 以下
300 kHz以下 PULSE 35 A– C4 29
・ラインドライバ [出荷時設定:スルーモード]
(適用ラインドライバ: 18 B+
TI製SN75174またはMC3487相当品)
2.8 V ≦(Hレベル)–(Lレベル)≦ 3.7 V SIGN 36 B–
・オープンコレクタ
(入力電流8~12 mA:制限抵抗要) 終端抵抗
(120 Ω,1/2 W)
TB1 ディップ
D+ スイッチS2 CN4
D– FM 34 多機能アナログモニタ出力 1
MEMOBUS AC 16 - +
RS-485 FM 0~+10 V (2 mA)
[出荷時設定:出力周波数]
最大115.2 kbps IG 0 V
(注4)
ハードワイヤー TB2
ベースブロック入力 H1
H2
非常停止 短
スイッチ 絡 TB2 ハードワイヤーベースブロック
線 DM+ モニタ出力
(注5)
HC DM-
はシールド線, はツイストペアシールド線です。
注1. DC リアクトル(オプション)を取付ける場合は、必ず端子+1、+2 間の短絡片を外してください。
注2. シーケンス入力信号(S1~S8)が無電圧接点またはNPN トランジスタによるシーケンス接続の場合の接続を示します。出荷時設定はシンクモード(0V コモン)です。
C1000は,シンクモードを選択した場合、内部電源(+24 V) しか使用できません。また,ソースモードは外部電源しか使用できません。
注3. 制御回路端子の+V電圧の出力電流容量は,最大 20mAです。制御回路端子+V、AC間を短絡させないでください。誤動作や故障の要因となります。
注4. ハードワイヤーベースブロック入力はソースモードのみです。端子H1-HC、H2-HC 間には、接点またはPNP トランジスタを使用してください。
注5. ハードワイヤーベースブロックを使用する場合、必ずH1-HC、H2-HC 間の短絡線を外してください。
注6.I PMギアモータのモータ部の電源電圧定格は200~230Vです。240Vでのご使用はお問い合わせください。
736 注7. ギアモータの接地端子とC1000インバータの接地端子を直接接続し、インバータ側で接地を行ってください。
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page7
位置制御タイプ
端子台機能
■主回路端子(TB3)機能
端子記号 端子名 機能
R/L1
S/L2 主回路電源入力 商用電源に接続するための端子です。
T/L3
U/T1
V/T2 C1000 の出力 モータに接続するための端子です。
W/T3
B1
制動抵抗器接続 制動抵抗器または制動抵抗器ユニットを接続するための端子です。
B2
−
+1 DC リアクトル接続または DC リアクトルは、+1 端子と+2 端子に接続します。
直流電源入力 直流電源は、+1 端子と-端子に接続します。(注1)
+2
200V:D 種接地
(接地抵抗100 Ω 以下) 接地用の端子です。
注1. DC リアクトルを接続する場合、+1、+2の間の短絡片を外してください。
■ディップスイッチ機能
端子記号 機能 出荷時設定
S1 端子A2の電圧電流入力の切り替え I( 電流)
S2 MEMOBUS 通信の終端抵抗ON/OFF の切り替え OFF
S3 シンクモード/ソースモードの切替え SINK
■ハードワイヤーベースブロック端子(TB2)機能
種類 端子記号 端子名称(出荷時設定) 端子の機能(信号レベル)
24V、8mA
開:フリーラン 閉:通常運転
H1 ハードワイヤー 内部インピーダンス 3.3 kΩ 最小オフ幅1ms 以上
ハードワイヤー H2 ベースブロック入力1, 2 ハードワイヤーベースブロック入力を使う場合は、H1-HC、H2-HC間の短絡線を外してください。
ベースブロック ハードワイヤーベースブロック入力端子は、ソースモードのみです。
入力 端子H1-HC、H2-HC 間には、接点またはPNPトランジスタを接続してください。また、端子HCと
端子SCを短絡すると、C1000が破損する恐れがありますので、配線に注意してください。
HC ハードワイヤー
ベースブロック入力用コモン ハードワイヤーベースブロック入力用コモン
■制御回路端子コネクタ(CN4)機能
●入力端子
種類 端子記号 端子名称(出荷時設定) 端子の機能(信号レベル)
S1 多機能接点入力選択1(運転指令(サーボオン))
S2 多機能接点入力選択2(クリア入力信号(a接点))
S3 多機能接点入力選択3(外部異常(a接点))
S4 多機能接点入力選択4(異常リセット) ホトカプラ
多機能接点入力 S5 多機能接点入力選択5(正転側駆動禁止) 24V、8mA(注1)
S6 多機能接点入力選択6(逆転側駆動禁止)
S7 多機能接点入力選択7(スルーモード)
S8 多機能接点入力選択8(スルーモード)
SC 多機能接点入力選択コモン 多機能接点入力選択コモン
+V 周波数設定用 10.5 V(許容電流 最大20 mA)
A1 多機能アナログ入力1(主速周波数指令) 電圧入力 0 ~ 10 V/72%(入力インピーダンス:20kΩ)
主速周波数 電圧入力または電流入力(ディップスイッチS1 で選択)
指令入力 A2 多機能アナログ入力2(端子A1と加算) 0~10 V/100%(入力インピーダンス:20kΩ)
4~20 mA/100%(入力インピーダンス:250Ω)
AC 周波数指令コモン 0V
E(G) シールド被覆線、アース線接続 ─
注1. 初期設定ではシンクモードに設定されています。ソースモードに切り替える場合はディップスイッチS3で設定し、外部電源DC24V±10% を使用してください。
737
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
Page8
●入力端子
種類 端子記号 端子名称(出荷時設定) 端子の機能(信号レベル)
A+ 位置指令パルス入力 A相 +側 ラインドライバまたはオープンコレクタレベルで300kHz 以下のパルス
位置指令 A- 位置指令パルス入力 A相 -側 信号を入力
パルス入力 • ラインドライバ:2.8V≦(H レベル)-(L レベル)≦ 3.7V
(パルス) B+ 位置指令パルス入力 B相 +側 (適用ラインドライバ:TI 製SN75154 またはMC3487 相当品)
B- 位置指令パルス入力 B相 -側 • オープンコレクタ:入力電流8~12mA(制限抵抗要)
位置指令パルスにオープンコレクタを使用する場合は、入力電流が8mA~12mAになるように
重要 必ず制限抵抗を接続してください。インバータおよび上位装置が破損する恐れがあります。
●位置指令パルス入力オープンコレクタ時の適用例
外部電源
制限抵抗 A+ 150Ω 10kΩ
VIN VF
A-
VF=1.5~1.8V
●制限抵抗参考値
入力電圧VIN 制限抵抗
5V±5% 220Ω(1/10W以上)
12V±10% 1kΩ(1/2W以上)
24V±10% 2.2kΩ(1W以上)
●出力端子
種類 端子記号 端子名称(出荷時設定) 端子の機能(信号レベル)
P1 多機能ホトカプラ出力1(位置決め完了)
C1 多機能ホトカプラ出力コモン
P2 多機能ホトカプラ出力2(運転中)
多機能 C2 多機能ホトカプラ出力コモン
ホトカプラ ホトカプラ出力48V、2~50 mA
出力 P3 多機能ホトカプラ出力2(異常(反転出力))
C3 多機能ホトカプラ出力コモン
P4 多機能ホトカプラ出力2(スルーモード)
C4 多機能ホトカプラ出力コモン
FM 多機能アナログモニタ出力1(モータ速度) 0~10V/0~100%
モニタ出力
AC モニタコモン 0V
ハードワイヤー DM+ ハードワイヤーベースブロックモニタ出力 監視回路状態出力。
ベースブロック ハードワイヤーベースブロック入力が2 点とも正常に働いたときにオフ
モニタ出力 DM- ハードワイヤーベースブロックモニタ出力コモン になります。48V、50mA以下
■通信端子(TB1)機能
種類 端子記号 端子名称(出荷時設定) 端子の機能(信号レベル)
D+ 通信データ(+) MEMOBUS通信用RS-485にて通信運転を可能とする
MEMOBUS RS-485 MEMOBUS通信プロトコル 115.2kbps
通信 D- 通信データ(-) (最大)
IG 通信グランド 0V
738
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page9
位置制御タイプ
制御回路端子コネクタ(CN4)の配列
CN4コネクタピンの配列は以下のようになります。 C1000側
ケーブル側
注1. CN4コネクタ用ケーブル長は、最大3mとなります。 36 pin 18 pin 18 pin 36 pin
制御回路の配線を行う場合、配線距離にご注意ください。
注2. 制御回路配線は,主回路配線及び他の動力線や電力線と分離して配線してください。
19 pin 1 pin 1 pin 19 pin
■制御回路端子コネクタのピン配置 制御回路端子コネクタのピン配列、及びインタフェースのピン配列
ピン番号 端子記号 端子名称 ピン番号 端子記号 端子名称
1 S1 多機能接点入力選択1 19 S5 多機能接点入力選択5
2 S2 多機能接点入力選択2 20 S6 多機能接点入力選択6
3 S3 多機能接点入力選択3 21 S7 多機能接点入力選択7
4 S4 多機能接点入力選択4 22 S8 多機能接点入力選択8
5 NC 接続不可(絶縁用空き端子) 23 SC 多機能接点入力選択コモン
6 NC 接続不可(絶縁用空き端子) 24 NC 接続不可(絶縁用空き端子)
7 P1 多機能ホトカプラ出力1 25 NC 接続不可(絶縁用空き端子)
8 C1 多機能ホトカプラ出力1 コモン 26 P3 多機能ホトカプラ出力3
9 P2 多機能ホトカプラ出力2 27 C3 多機能ホトカプラ出力3 コモン
10 C2 多機能ホトカプラ出力2 コモン 28 P4 多機能ホトカプラ出力4
11 NC 接続不可(絶縁用空き端子) 29 C4 多機能ホトカプラ出力4 コモン
12 NC 接続不可(絶縁用空き端子) 30 NC 接続不可(絶縁用空き端子)
13 +V 周波数設定用電源 31 NC 接続不可(絶縁用空き端子)
14 A1 多機能アナログ入力1 32 AC 周波数指令コモン
15 A2 多機能アナログ入力2 33 AC 周波数指令コモン
16 AC 周波数指令コモン 34 FM 多機能アナログモニタ出力
17 A+ 位置指令パルス出力 A相 +側 35 A- 位置指令パルス出力 A相 -側
18 B+ 位置指令パルス出力 B相 +側 36 B- 位置指令パルス出力 B相 -側
■ケーブル側コネクタ
CN4に接続するケーブル側には、以下のコネクタキットのご使用を推奨します。
コネクタキット 形 式 外 観 メーカー
ジャックスクリューM2.6 型:10336-52A0-008
MDRシステム
ノンシールドシェルキット
スリーエムジャパン(株)
ワンタッチロック型:10336-52F0-008
MDRシステム
はんだ付プラグ 10136-3000PE ——
CN4に接続するコネクタハーネス(I/Oケーブル)として以下のものを推奨します。
メーカー ミスミ
名 称 IEEE1284(MDR)ハーフピッチコネクタハーネス 汎用EMI対策 ストレートタイプ/アングルタイプ ワンタッチロック型
型 式 SHPT ̶ ○○ ̶ ○○ ̶ 36 ̶ ○○ ※型式の詳細はミスミのカタログを参照してください。
コネクタタイプ 形状仕様タイプ ケーブルタイプ 芯数 指定長0.2m~、0.1m毎 ※指定長は3m以下となるようにしてください。
ストレートタイプ アングルタイプ
外 観
指定長 指定長
739
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
Page10
オペレータ機能
オペレータ機能
オペレータ各部の名称と機能
14 1312
ALM REV
DRV FOUT 11
1 ESC LO 10
RE 8
2 RESET ENTER 7
9
RUN STOP
3 4 5 6
No. 操作部 名 称 機 能
• ひとつ前の画面に戻ります。
1 ESC キー • パラメータ番号設定時に変更する桁を左へ移動します。
• 長押しすると、どの画面からでも周波数指令画面に戻ります。
2 RESET キー • パラメータの数値設定時などに、変更する桁を右に移動します。
• 異常検出時は異常リセットキーになります。
3 RUN RUN キー C1000 を運転させます。
4 アップ キー • 画面を移行します。
• パラメータ番号及び設定値を変更(増加)します。
5 ダウン キー • 画面を移行します。
• パラメータ番号及び設定値を変更(減少)します。
6 STOP STOP キー 運転を停止させます。
7 ENTER キー • 各モード,パラメータ、設定値を決定する際に押します。
• 次の画面に進む場合に使用します。
8 LO/RE 選択キー オペレータでの運転(LOCAL) と外部からの指令での運転(REMOTE) を切り替える際に押します。
9 RUN ランプ C1000 の運転中に点灯します。 ランプの点滅については、C1000テクニカルマニュアルを参照してください。
10 LO LO/RE ランプ オペレータからの運転指令選択中(LOCAL) に点灯します。
RE
11 FOUT LED ランプ
12 REV LED ランプ
ランプ表示については、C1000テクニカルマニュアルを参照してください。
13 DRV LED ランプ
14 ALM LED ランプ
ディジタル文字の対応表
オペレータで表示されるディジタル文字は、以下の表のとおりです。
また、本書ではディジタル文字の点灯/点滅表示は下記のように説明しています。
点 灯 点 滅
表示文字 LED文字 表示文字 LED文字 表示文字 LED文字 表示文字 LED文字
0 9 I R
1 A J S
2 B K T
3 C L U
4 D M (注1) V
5 E N W (注1)
6 F O X 表示なし
7 G P Y
8 H Q Z 表示なし
740 注1. 2つの桁を使って表示します。
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page11
位置制御タイプ
オペレータ表示機能の階層
キー操作の説明
(回転速度表示)
DRV
ランプ (注1)
点灯中 (正転選択) (逆転選択)
R
ド U ALM REV
ラ N DDRV FOUT
イ を 電ES源C 投入(DLO
押 RRE V点灯)
ブ す RESET ENTER
モ と
RUN STOP
ー モ
ド ー
タ (出力電流表示)
が
回
転
し ※“XX”と示されているところは,C1000では
ま (出力トルク表示) 実際の設定値を表示します。
す
。
X X
(モニタ表示)
X X X X X
X X X X X X
(ベリファイ機能)
DRV X X X X X X
ランプ
消灯中
プ X X X X X
ロ (セットアップモード)
グ
ラ 運
転
ム は X X
モ で
ー き
ド ま
せ X X
ん (パラメータ設定モード)
。
X X X X X X
X X X X X
(オートチューニング)(注2)
X X X X X X X
注1. LOCALモード選択中にのみ(、逆転)を選択できます。
注2. C1000インバータのオートチューニングの機能は、モータのパラメータを自動で計測しパラメータを変更する機能です。
あらかじめ最適な値が設定されていますのでオートチューニングは行わないでください。
741
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
* *
Page12
パラメータ一覧
パラメータ一覧
パラメータ一覧
・ 出荷時設定値がC1000テクニカルマニュアル記載の値と異なるパラメータがあります。ご注意ください。
・ 表に記載されていないパラメータもあります。詳しくはC1000テクニカルマニュアルを参照してください。
・ 出荷時設定値は位置制御運転を行う設定となっています。
・ モータパラメータにつきましては、当社IPMモータに最適な値があらかじめ設定してあります。
■環境設定
パラメータ 機 能 設定範囲 出荷時設定
0: A1-01、A1-04の設定/モニタ可能
Uパラメータのモニタ可能
パラメータのアクセスレベル 1: A2-01~32のみ設定/モニタ可能 2
2: すべてのパラメータが設定/モニタ可能
0: 初期化しない
1110: ユーザパラメータ設定値での初期化
イニシャライズ 2220: 工場出荷時設定に初期化 (注1) 0
3330: 使用不可
6660: 使用不可
0: 無効
1: 有効
DriveWorks EZ機能選択 2: 多機能接点入力で切り替え 0
( H1-□□ = 9Fで有効)
お気に入り1 d9.02
お気に入り2 d9.05
お気に入り3 d9.06
お気に入り4 d9.07
お気に入り5 d9.08
お気に入り6 d9.10
お気に入り7 d9.21
お気に入り8 最小値: A1-01 d9.22
最大値: o4-13
お気に入り9 d9.28
お気に入り10 d9.29
お気に入り11 d9.30
お気に入り12 d9.31
お気に入り13 L7.01
お気に入り14 L7.02
お気に入り15 L7.03
お気に入り16 L7.04
~ お気に入り17~32 ̶
注1. イニシャライズ2220実行後のパラメータ値は、C1000テクニカルマニュアル記載の出荷時設定ではなく、ニッセイ仕様の出荷時設定値に戻りますのでご注意願います。
詳細はインバータ購入時に同梱されている小紙(黄色)を参照してください。
742
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page13
位置制御タイプ
■アプリケーション
パラメータ 機 能 設定範囲 出荷時設定
0: オペレータ
周波数指令選択1 (注1) 1: 制御回路端子(アナログ入力) 1
2: MEMOBUS 通信
0: オペレータ
運転指令選択1 1: 制御回路端子(シーケンス入力) 1
2: MEMOBUS 通信
0: 減速停止
停止方法選択 1: フリーラン停止
2: 全領域直流制動(DB) 停止 1
3: タイマ付きフリーラン停止
逆転禁止選択 (注1) 0: モータ逆転可能 0
1: モータ逆転禁止
0: 運転不可
プログラムモードの運転指令選択 1: 運転可能
2: プログラムモードへの移行不可 0
(運転中はプログラムモードに移らない)
0: 標準
相順選択 (注1) 1: 相順入れ替え 0
( 回転方向(正転・逆転)が切り替わります。)
0: オペレータ
周波数指令選択1 (注2) 1: 制御回路端子(アナログ入力) 0
2: MEMOBUS 通信
0: オペレータ
運転指令選択2 1: 制御回路端子(シーケンス入力) 0
2: MEMOBUS 通信
0: PID制御無効
1: PID制御有効(偏差をD制御する)
2: PID制御有効(フィードバック値をD制御する)
PID制御の選択 (注2) 3: PID制御有効(周波数指令+PID出力、 0
偏差をD制御する)
4: PID制御有効(周波数指令+PID出力、
フィードバック値をD制御する)
比例ゲイン(P) 最小値: 0.00
1.00
最大値: 25.00
最小値: 0.0 s
積分時間 ( I ) 1.0
最大値: 360.0 s
微分時間 (D) 最小値: 0.00 s 0.00
最大値: 10.00 s
注1. 位置制御で運転する場合、設定値を工場出荷時設定値から変更しないでください。
注2. 速度制御運転時に有効となります。
743
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
Page14
■チューニング(調整)
パラメータ 機 能 設定範囲 出荷時設定
最小値: 0.0 s
加速時間1( 注2) 1.5
最大値: 6000.0 s
最小値: 0.0 s
減速時間1( 注2) 5.0
最大値: 6000.0 s
加速時間2( 注2) 最小値: 0.0 s 10.0
最大値: 6000.0 s
減速時間2( 注2) 最小値: 0.0 s 10.0
最大値: 6000.0 s
加速時間3( 注2) 最小値: 0.0 s 10.0
最大値: 6000.0 s
最小値: 0.0 s
減速時間3( 注2) 10.0
最大値: 6000.0 s
加速時間4( 注1) 最小値: 0.0 s 0.1
最大値: 6000.0 s
減速時間4( 注1) 最小値: 0.0 s 0.0
最大値: 6000.0 s
0: 0.01 秒単位(0.00 ~ 600.00 秒)
加減速時間の単位 1
1: 0.1 秒単位(0.0 ~ 6000.0 秒)
0.1kW用: 10.00
0.2kW用: 8.00
速度制御(ASR)の比例ゲイン1(P) 最小値: 0.00 0.4kW用: 6.00
最大値: 300.00 0.75kW用: 9.00
1.5kW用: 10.00
2.2kW用: 10.00
速度制御(ASR)の積分時間1(I ) 最小値: 0.000 s 0.500
最大値: 10.000 s
速度制御(ASR)の比例ゲイン2(P) 最小値: 0.00
10.00
最大値: 300.00
速度制御(ASR)の積分時間2(I ) 最小値: 0.000 s 0.500
最大値: 10.000 s
速度制御(ASR)の一次遅れ時定数1 最小値: 0.000 s 0.016
最大値: 0.500 s
速度制御(ASR)の一次遅れ時定数2 最小値: 0.000 s
最大値: 0.500 s 0.000
1: 2.0 kHz
2: 4.0 kHz
3: 6.0 kHz
キャリア周波数選択 4: 8.0 kHz 2
5: 10.0 kHz
6: 12.0 kHz
注1. 位置制御で運転する場合、設定値を工場出荷時設定値から変更しないでください。
注2. 速度制御運転時に有効となります。
744
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page15
位置制御タイプ
■指令
パラメータ 機 能 設定範囲 出荷時設定
~ 周波数指令選択1~16 (注2) 最小値: 0 r/min 0
最大値: 2500 r/min
寸動周波数指令 (注2) 最小値: 0 r/min 600
最大値: 2500 r/min
~ ジャンプ周波数1~3 (注2) 最小値: 0.0 Hz
最大値: 400.0 Hz 0.00
ジャンプ周波数幅 (注2) 最小値: 0.0 %
最大値: 40.0 % 1.0
位置制御選択 0: 速度制御
1: 位置制御 1
0: 符号+パルス列(正論理)
位置指令方法の選択 2: CW + CCW(正論理) 0
4: 90°位相差二相パルス(4倍)
位置決め用 最小値: 1
電子ギア比(分子) 最大値: 65535 1
位置決め用 最小値: 1
電子ギア比(分母) 最大値: 65535 1
位置指令 最小値: 0 ms 0
加減速時間時定数 最大値: 65535 ms
位置指令 最小値: 0 ms
最大値: 2000 ms 0
移動平均時間
位置ループゲイン 最小値: 0.0 Hz 0.0
切り替え周波数 最大値: 400.0 Hz
位置ループゲイン1 最小値: 0.00
最大値: 50.00 5.00
位置ループゲイン2 最小値: 0.00
最大値: 50.00 5.00
0: 正転
運転指令入力時の回転方向選択 1: 逆転 0
位置決め完了幅 最小値: 0
最大値: 65535 50
位置決め完了信号 0: 位置偏差のみ
0
出力タイミング選択 1: 位置偏差+位置指令フィルタ出力
2: 位置偏差+位置指令入力
NEAR信号幅 最小値: 1
最大値: 65535 100
0.1kW用: 2880
0.2kW用: 2880
位置偏差過大 最小値: 0 0.4kW用: 2880
検出レベル下位4桁 最大値: 9999 0.75kW用: 4320
1.5kW用: 4320
2.2kW用: 4320
0.1kW用: 12
0.2kW用: 12
位置偏差過大 最小値: 0 0.4kW用: 12
検出レベル上位5桁 最大値: 65535 0.75kW用: 18
1.5kW用: 18
2.2kW用: 18
0.1kW用: 1440
0.2kW用: 1440
位置偏差過大 最小値: 0 0.4kW用: 1440
警告レベル下位4桁 最大値: 9999 0.75kW用: 2160
1.5kW用: 2160
2.2kW用: 2160
0.1kW用: 6
位置偏差過大 最小値: 0 0.2kW用: 6
0.4kW用: 6
警告レベル上位5桁 最大値: 65535 0.75kW用: 9
1.5kW用: 9
2.2kW用: 9
LIM SW1入力時の 最小値: 0.0 Hz
クリープ速度 最大値: 400.0 Hz 3.0
LIM SW1入力後の 最小値: 0
移動角 1024
最大値: 65535
LIM SW2入力後の 最小値: 0
移動角 最大値: 65535 50
位置制御用 0: 位置制御用DriveWorksEZ 無効 0
Drive Works EZ選択 1: 位置制御用DriveWorksEZ 有効
注1. 位置制御で運転する場合、設定値を工場出荷時設定値から変更しないでください。
注2. 速度制御運転時に有効となります。 745
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
Page16
■端子機能選択
パラメータ 機 能 設定範囲 出荷時設定
端子S1の機能選択 42
端子S2の機能選択 37
端子S3の機能選択 24
端子S4の機能選択 最小値: 1 14
最大値: 9F
端子S5の機能選択 P.748参照 4D
端子S6の機能選択 4E
端子S7の機能選択 F
端子S8の機能選択 F
端子P1-C1の機能選択 2A
端子P2-C2の機能選択 最小値: 0 0
端子P3-C3の機能選択 最大値: 192
P.749参照 10E
端子P4-C4の機能選択 F
0: 0.1 kWh 単位
積算電力パルス出力 1: 1 kWh 単位
単位選択 2: 10 kWh 単位 0
3: 100 kWh 単位
4: 1000 kWh 単位
最小値: 0
端子A1機能選択 最大値: 1F 0
P.749参照
端子A1入力ゲイン 最小値: -999.9 % 72.0
最大値: 999.9 %
端子A1入力バイアス 最小値: -999.9 % 0.0
最大値: 999.9 %
0: 0 ~ 10 V(ゼロリミットあり)
端子A2信号レベル選択 1: 0 ~ 10 V(ゼロリミットなし) 2
2: 4 ~ 20 mA
最小値: 0
端子A2機能選択 最大値: 1F 0
P.749参照
端子A2入力ゲイン 最小値: -999.9 %
最大値: 999.9 % 100.0
端子A2入力バイアス 最小値: -999.9 %
最大値: 999.9 % 0.0
アナログ入力のフィルタ時定数 最小値: 0.00 s
最大値: 2.00 s 0.03
端子A1オフセット 最小値: -500
最大値: 500 0
端子A2オフセット 最小値: -500 0
最大値: 500
端子FMモニタ選択 最小値: 000 105
最大値: 999
端子FMモニタゲイン 最小値: -999.9 %
最大値: 999.9 % 100.0
端子FMモニタバイアス 最小値: -999.9 % 0.0
最大値: 999.9 %
端子FM信号レベル選択 0: 0 ~ 10 V(ゼロリミットあり) 0
1: 0 ~ 10 V(ゼロリミットなし)
746
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page17
位置制御タイプ
■保護機能
パラメータ 機 能 設定範囲 出荷時設定
0: 無効 3: KEB 動作
瞬時停電動作選択 (注1) 1: 有効 4: CPU 動作中KEB 有効 0
2: CPU 動作中有効 5: 瞬停検出時KEB 減速停止
減速中ストール 0: 無効 3: 有効(制動抵抗器付きストール防止機能)
防止機能選択 (注1) 1: 有効 4: 過励磁減速1 0
2: 最適調整 5: 過励磁減速2
過電圧抑制機能選択 (注1) 0: 無効
1: 有効 0
周波数検出レベル 最小値: 0.0 Hz
最大値: 400.0 Hz 0.0
周波数検出幅 最小値: 0.0 Hz
最大値: 20.0 Hz 4.0
正転側電動状態トルクリミット 150
逆転側電動状態トルクリミット 最小値: 0 % 150
正転側回生状態トルクリミット 最大値: 150 % 150
逆転側回生状態トルクリミット 150
外部正転側トルクリミット 最小値: 0 %
最大値: 150 % 150
外部逆転側トルクリミット 最小値: 0 % 150
最大値: 150 %
■オペレータ関係
パラメータ 機 能 設定範囲 出荷時設定
ドライブモード 最小値: 104
表示項目選択 最大値: 621 109
電源オン時 1: 周波数指令(U1-01) 4: 出力電流(U1-03)
モニタ表示項目選択 2: FWD/REV(正転中/逆転中) 5: o1-01 で設定したモニタ項目 3
3: 出力周波数(U1-02)
周波数指令設定/表示の単位 0: 0.01 Hz 単位 2 : r/min 単位 2
1: 0.01 % 単位 3: 任意単位
注1. 位置制御で運転する場合、設定値を工場出荷時設定値から変更しないでください。
注2. 速度制御運転時に有効となります。
■パラメータの出荷時設定について
ニッセイ仕様C1000インバータは、以下の定数に関して出荷時設定値が変更されています。
A1-03を2220でイニシャライズを行った場合、下記定数は表中の値に戻ります。テクニカルマニュアルに記載しています値には戻りま
せんので注意願います。
No. 名 称 出荷時設定 No. 名 称 出荷時設定
A2-01 お気に入り1~32 d9-02 C2-01 加速開始時のS字特性時間 0
A2-02 d9-05 C2-02 加速完了時のS字特性時間 0
A2-03 d9-06 C2-03 減速開始時のS字特性時間 0
A2-04 d9-07 d9-01 位置制御選択 1
A2-05 d9-08 E1-01 入力電圧設定 200
A2-06 d9-10 H1-01 端子S1の機能選択 42
A2-07 d9-21 H1-02 端子S2の機能選択 37
A2-08 d9-22 H1-05 端子S5の機能選択 4D
A2-09 d9-28 H1-06 端子S6の機能選択 4E
A2-10 d9-29 H1-07 端子S7の機能選択 0F
A2-11 d9-30 H1-08 端子S8の機能選択 0F
A2-12 d9-31 H2-01 端子P1-C1の機能選択 2A
A2-13 L7-01 H2-02 端子P2-C2の機能選択 0
A2-14 L7-02 H2-03 端子P3-C3の機能選択 10E
A2-15 L7-03 H2-04 端子P4-C4の機能選択 0F
A2-16 L7-04 H3-03 端子A1入力ゲイン 72
A2-17~32 — H4-01 端子FMモニタ選択 105
b1-03 停止方法選択 1 H5-05 CE(MEMOBUS通信エラー)検出選択 0
b2-01 零速度レベル 0 L3-04 減速中ストール防止機能選択 0
b2-13 停止時短絡制動時間 0 n8-57 高周波重畳選択 1
C1-01 加速時間1 1.5 o1-01 ドライブモード表示項目選択 109
C1-02 減速時間1 5 o1-02 電源オン時モニタ表示項目選択 3
C1-07 加速時間4 0.1 o1-03 周波数指令設定/表示の単位 2
C1-08 減速時間4 0 747
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
Page18
設定一覧
設定一覧
多機能接点入力の設定値
設定値 機能 設定値 機能
0 3 ワイヤシーケンス(注1) 37 クリア入力信号(a接点)
1 LOCAL/REMOTE選択 38 クリア入力信号(b接点)
2 指令権の切替えコマンド(注1) 39 指令パルス停止
3 多段速指令1(注2) 40 正転運転指令(2ワイヤシーケンス()注1)
4 多段速指令2(注2) 41 逆転運転指令(2ワイヤシーケンス()注1)
5 多段速指令3(注2) 42 運転指令(サーボオン()注3)
6 寸動(JOG)周波数指令選択(注2) 43 正転/逆転指令2(2ワイヤシーケンス2)
7 加減速時間選択1(注2) 44 オフセット周波数1加算(注2)
8 ベースブロック指令(a接点) 45 オフセット周波数2加算(注2)
9 ベースブロック指令(b接点) 46 オフセット周波数3加算(注2)
A ホールド加減速停止(注2) 4D 正転側駆動禁止
B oH2( ドライブ過熱予告) 4E 逆転側駆動禁止
C 多機能アナログ入力選択 4F 外部正転側トルクリミット選択
E 速度制御積分リセット 60 直流制動指令
F スルーモード 61 外部サーチ指令1:最高出力周波数(注1)
10 UP指令(注2) 62 外部サーチ指令2:設定された周波数指令(注1)
11 DOWN指令(注2) 63 界磁弱め指令
12 FJOG指令(注1) 64 外部逆転側トルクリミット選択
13 RJOG指令(注1) 65 KEB(瞬時停電時減速運転)指令1(b接点()注1)
14 異常リセット 66 KEB(瞬時停電時減速運転)指令1(a接点()注1)
15 非常停止(a接点) 67 通信テストモード
16 モータ切り替え指令(モータ2選択) 68 HSB(ハイスリップ制動)
17 非常停止(b接点) 6A Drive Enable
18 タイマ機能入力 75 UP2指令(注2)
19 PID制御キャンセル(注2) 76 DOWN2指令(注2)
1A 加減速時間選択2(注2) 77 速度制御(ASR)比例ゲイン切り替え
1B パラメータ書き込み許可 7A KEB(瞬時停電時減速運転)指令2(b接点()注1)
1E アナログ周波数指令サンプル/ホールド(注2) 7B KEB(瞬時停電時減速運転)指令2(a接点()注1)
20~2F 外部異常 7C 短絡制動指令(a接点)
30 PID積分リセット(注2) 7D 短絡制動指令(b接点)
31 PID積分ホールド(注2) 89 LIM SW1入力
32 多段速指令4(注2) 8A LIM SW2入力
33 速度/位置制御切り替え信号 90~97 DriveWorks EZ ディジタル入力1~8
34 PID入/切(ソフトスタータの入り切り()注2) 9F DriveWorks EZ 機能無効入力
35 PID入力特性切り替え(注2)
注1. 位置制御運転時は設定しないでください。位置制御設定異常(oPE21)が発生します。
注2. 位置制御運転時は無効になります。
注3. 速度制御運転時には運転指令(2ワイヤシーケンス2)として機能します。
748
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様
Page19
位置制御タイプ
多機能接点出力の設定値
設定値 機能 設定値 機能
0 運転中 1E 異常リトライ中
1 零速 1F モータ過負荷oL1(oH3含む)アラーム予告
2 周波数(速度)一致1 20 oH(ドライブ過熱予告)アラーム予告
3 任意周波数(速度)一致1 22 機械劣化検出(a接点)
4 周波数(FOUT)検出1 2A 位置決め完了
5 周波数(FOUT)検出2 2B 位置決め近傍信号
6 ドライブ運転準備完了(READY) 2C 回転角同期信号
7 U(v 主回路低電圧)検出中(a接点) 2D 電気角喪失信号
8 ベースブロック中(a接点) 2F メンテナンス時期
9 周波数指令選択状態 30 トルクリミット(電流制限)中
A 運転指令状態 37 周波数出力中
B 過トルク/アンダトルク検出1(a接点) 38 Drive Enable中
C 周波数指令喪失中 39 積算電力パルス出力
D 取付形制動抵抗不良 3C 運転モード
E 異常 3D 速度サーチ中
F スルーモード 3E PIDフィードバック異常(喪失中)
10 軽故障 3F PIDフィードバック異常(超過中)
11 異常リセット中 4A 瞬時停電時減速運転(KEB)動作中
12 タイマ機能出力 4B 短絡制動中
13 周波数(速度)一致2 4C 非常停止中
14 任意周波数(速度)一致2 4D oHプリアラーム積算時間オーバ
15 周波数(FOUT)検出3 4E rr中(内蔵制動トランジスタ異常中)
16 周波数(FOUT)検出4 4F rH中(取付形制動抵抗器過熱中)
17 過トルク/アンダトルク検出1(b接点) 60 内部冷却ファン故障検出中
18 過トルク/アンダトルク検出2(a接点) 61 磁極検出完了
19 過トルク/アンダトルク検出2(b接点) 90 DriveWorks EZ ディジタル入力1
1A 逆転中 91 DriveWorks EZ ディジタル入力2
1B ベースブロック中(b接点) 92 DriveWorks EZ ディジタル入力3
1C モータ選択(モータ2選択中) 100~192 0~92の反転出力
多機能アナログ入力の設定値
設定値 機能 設定値 機 能
0 主周波数指令(重複した場合は加算()注1) C PID目標値(注1)
1 周波数ゲイン(注1) D 周波数バイアス(主速に加算()注1)
2 補助周波数指令1(注1) E モータ温度入力(PTC入力)
3 補助周波数指令2(注1) F スルーモード
4 出力電圧バイアス(注1) 10 正側トルクリミット
5 加減速時間ゲイン(短絡係数()注1) 11 負側トルクリミット
6 直流制動(DB)電流 12 回生域トルクリミット
7 過トルク/アンダトルク検出レベル 14 トルク補償
8 運転中ストール防止レベル(注1) 15 正/負両側トルクリミット
9 出力周波数下限レベル(注1) 16 PID差動フィードバック(注1)
B PIDフィードバック(注1) 1F スルーモード
注1. 位置制御運転時は無効になります。
749
技術資料 制御部仕様 モータ部・ブレーキ部 F3タイプ Fタイプ H2タイプ G3タイプ IPMギアモータ
仕様 同心中空軸・同心中実軸 中空軸・中実軸 直交軸 平行軸
Page20
モニタ機能(パラメータU)
モニタパラメータにより、C1000の運転状況に関する様々な情報をオペレータで確認できます。
モニタパラメータの中には、H4-01に特定のモニタ番号を設定することにより、アナログ出力1端子(FM)からモニタできるものもあり
ます。
パラメータ 機 能 単位 アナログ出力
周波数指令 r/min ○
出力周波数 r/min ○
出力電流 A ○
モータ速度 r/min ○
出力電圧指令 Vac ○
主回路直流電圧 Vdc ○
出力電力 kW ○
トルク指令(内部) %(定格比) ○
入力端子の状態 ̶
出力端子の状態 ̶
運転状態 ̶
端子A1 入力電圧 % ○
端子A2 入力電圧 % ○
oPE 異常のパラメータ ̶
ソフトウェアNo.(FLASH) ̶
ソフトウェアNo.(ROM) ̶
現在発生中の異常 ̶
異常時入力端子の状態 ̶
異常時出力端子の状態 ̶
異常時運転状態 ̶
~ 1回前~10回前の異常内容 ̶
~ 1回前~10回前の累積稼働時間 h
累積稼働時間 h
放熱フィンの温度 ℃ ○
kWh(積算電力)下位4 桁 kWh
kWh(積算電力)上位5 桁 MWh
モータ過負荷積算値(oL1) % ○
入力パルス周波数 kHz
フィードバックパルス周波数 kHz
位置指令パルスカウンタ下位4桁 pulse
位置指令パルスカウンタ上位4桁 pulse
位置パルス偏差 pulse ○
フィードバックパルスカウンタ下位4桁 pulse
フィードバックパルスカウンタ上位4桁 pulse
注1. 上表に記載されていないモニタもあります。詳しくはC1000テクニカルマニュアルをご参照ください。
750
IPMギアモータ G3タイプ H2タイプ Fタイプ F3タイプ モータ部・ブレーキ部 制御部仕様 技術資料
平行軸 直交軸 中空軸・中実軸 同心中空軸・同心中実軸 仕様