



CAT2991
このカタログについて
| ドキュメント名 | リニアモータテーブルLT ハイスラストタイプ 新高推力仕様 LT170H2 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.1Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 日本トムソン株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
New
リニアモータテーブルLT
シリーズ
支社 LT170H2
東 部 支 社:〒108-8586 東京都港区高輪2-19-19 Tel. 03-3448-5931 Fax. 03-3449-4589
中 部 支 社:〒454-0004 名古屋市中川区西日置2-3-5 Tel. 052-331-7261 Fax. 052-332-3783 ハイスラストタイプに
西 部 支 社:〒550-0013 大阪市西区新町3-11-3 Tel. 06-6532-6341 Fax. 06-6543-1797
東 北 支 社:〒982-0031 仙台市太白区泉崎2-22-22 Tel. 022-307-1415 Fax. 022-743-5341 更なる高推力仕様の登場!
北 関 東 支 社:〒360-0018 熊谷市中央1-143 Tel. 048-528-5851 Fax. 048-525-8911
南 関 東 支 社:〒243-0014 厚木市旭町1-8-6 Tel. 046-228-6011 Fax. 046-228-6068
浜 松 支 社:〒435-0028 浜松市中央区飯田町335 Tel. 053-462-7111 Fax. 053-461-3041
豊 田 支 社:〒472-0005 知立市新池3-62 Tel. 0566-82-6201 Fax. 0566-82-8181
広 島 支 社:〒733-0003 広島市西区三篠町2-4-22 Tel. 082-237-6101 Fax. 082-237-6102
九 州 支 社:〒812-0016 福岡市博多区博多駅南4-19-1 Tel. 092-471-7971 Fax. 092-472-0079
海外部門
東 京:〒108-8586 東京都港区高輪2-19-19 Tel. 03-3448-5850 Fax. 03-3447-7637
営業所
長 岡 営 業 所:Tel. 0258-33-0823 Fax. 0258-35-5036 金 沢 営 業 所:Tel. 076-240-1115 Fax. 076-240-0059
宇都宮営業所:Tel. 028-651-6633 Fax. 028-651-6744 滋 賀 営 業 所:Tel. 077-567-1655 Fax. 077-567-1701
日 立 営 業 所:Tel. 029-275-1356 Fax. 029-275-1422 明 石 営 業 所:Tel. 078-927-3720 Fax. 078-927-3850
西東京営業所:Tel. 042-584-6051 Fax. 042-584-6052 熊 本 営 業 所:Tel. 096-373-0040 Fax. 096-366-7577
松 本 営 業 所:Tel. 0263-27-1422 Fax. 0263-27-0797
海外事務所
IKO INTERNATIONAL, INC(. 米国) IKO-THOMPSON(SHANGHAI)LTD(. 中国)
ニュージャージー Tel. 1-(973)402-0254 Fax. 1-(973)402-0441 上海 Tel. 86-21-3250-5525 Fax. 86-21-3250-5526
イリノイ Tel. 1-(630)766-6464 Fax. 1-(630)766-6869 北京 Tel. 86-10-6515-7681 Fax. 86-10-6515-7689
カリフォルニア Tel. 1-(562)941-1019 Fax. 1-(562)941-4027 広州 Tel. 86-20-8384-0797 Fax. 86-20-8381-2863
サンタクララ(シリコンバレー)Tel. 1-(408)492-0240 Fax. 1-(408)492-0245 武漢 Tel. 86-27-8556-1610 Fax. 86-27-8556-1630
ジョージア Tel. 1-(770)418-1904 Fax. 1-(770)418-9403 深圳 Tel. 86-(755)2265-0553 Fax. 86-(755)2298-0665
テキサス Tel. 1-(972)925-0444 Fax. 1-(972)707-0385 西安 Tel. 86-29-8323-5915
青島 Tel. 86-(532)8670-2246 Fax. 86-(532)8670-2242
IKO THOMPSON BEARINGS CANADA, INC.(カナダ) 瀋陽 Tel. 86-(24)2334-2662 Fax. 86-(24)2334-2442
トロント Tel. 1-(647)931-3933 寧波 Tel. 86-(574)8718-9535 Fax. 86-(574)8718-9533
IKO BRASIL SERVIÇOS EMPRESARIAIS LTDA(. ブラジル) NIPPON THOMPSON EUROPE B.V(. 欧州)
サンパウロ Tel. 55-(11) 2366-3033 オランダ Tel. 31-(10)462 68 68
IKO THOMPSON KOREA CO., LTD(. 韓国) ドイツ
デュッセルドルフ Tel. 49-(211)41 40 61 Fax. 49-(211)42 76 93
ソウル Tel. 82-2-6337-5851 Fax. 82-2-6337-5852
レーゲンスブルク Tel. 49-(941)20 60 70 Fax. 49-(941)20 60 719
IKO THOMPSON ASIA CO.,LTD(. タイ) イギリス Tel. 44-(1908)566144
バンコク Tel. 66-(2637)-5115 Fax. 66-(2637)-5116 スペイン Tel. 34-(949)26 33 90 Fax. 34-(949)26 31 13
フランス Tel. 33-(1)48 16 57 39 Fax. 33-(1)48 16 57 46
IKOウェブサイト メカトロ専用サイト
https://www.ikont.co.jp https://www.me-iko.com/
mecha-tool/index.php
https://www.ikont.co.jp/
● 製品の外観・仕様などは、改良のため予告なしに変更することがあります。● 本製品を輸出する際は、仕向国及び用途・需要者を確認いただき、客観要件に該当する場合は、輸出許可申請等必要な手続きをお取りください。
● 本カタログは正確を期して制作しておりますが、誤字・脱字等に起因する損害には責任を負いかねます。● 無断転載、転用を禁止します。
CAT-2991 Printed in Japan ©2024.10 (AK)
LT170H2
Page2
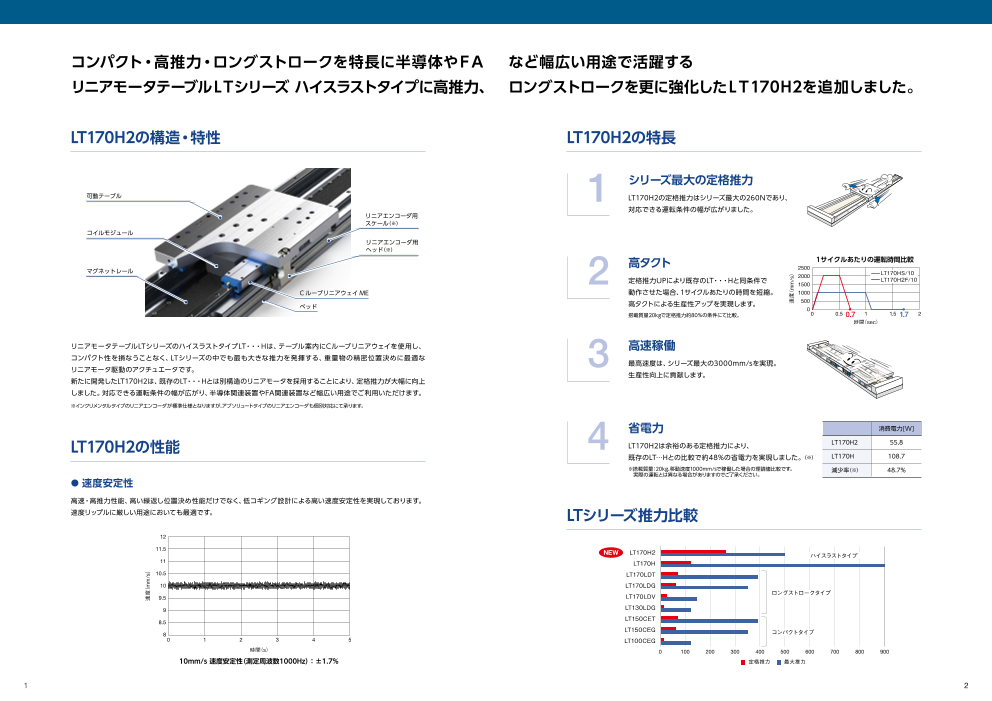
コンパクト・高推力・ロングストロークを特長に半導体やFA など幅広い用途で活躍する
リニアモータテーブルLTシリーズ ハイスラストタイプに高推力、 ロングストロークを更に強化したLT170H2を追加しました。
LT170H2の構造・特性 LT170H2の特長
可動テーブル 1 シリーズ最大の定格推力
LT170H2の定格推力はシリーズ最大の260Nであり、
対応できる運転条件の幅が広がりました。
リニアエンコーダ用
スケール(※)
コイルモジュール
リニアエンコーダ用
ヘッド(※)
マグネットレール 2 高タクト 1サイクルあたりの運転時間比較
2500
2000 LT170HS/10
定格推力UPにより既存のLT・・・Hと同条件で LT170H2F/10
1500
CルーブリニアウェイME 動作させた場合、1サイクルあたりの時間を短縮。 1000
ベッド 高タクトによる生産性アップを実現します。 500
0
搭載質量20kgで定格推力約80%の条件にて比較。 0 0.5 0.7 1 1.5 1.7 2
時間(sec)
リニアモータテーブルLTシリーズのハイスラストタイプLT・・・Hは、テーブル案内にCルーブリニアウェイを使用し、
コンパクト性を損なうことなく、LTシリーズの中でも最も大きな推力を発揮する、重量物の精密位置決めに最適な
リニアモータ駆動のアクチュエータです。 3 高速稼働
最高速度は、シリーズ最大の3000mm/sを実現。
生産性向上に貢献します。
新たに開発したLT170H2は、既存のLT・・・Hとは別構造のリニアモータを採用することにより、定格推力が大幅に向上
しました。対応できる運転条件の幅が広がり、半導体関連装置やFA関連装置など幅広い用途でご利用いただけます。
※インクリメンタルタイプのリニアエンコーダが標準仕様となりますが、アブソリュートタイプのリニアエンコーダも個別対応にて承ります。
LT170H2の性能 4 省電力 消費電力[W]
LT170H2は余裕のある定格推力により、 LT170H2 55.8
既存のLT…Hとの比較で約48%の省電力を実現しました。(※) LT170H 108.7
※搭載質量:2 0kg、移動速度1000mm/sで稼働した場合の理論値比較です。 減少率(※) 48.7%
実際の運転とは異なる場合がありますのでご了承ください。
● 速度安定性
高速・高推力性能、高い繰返し位置決め性能だけでなく、低コギング設計による高い速度安定性を実現しております。
速度リップルに厳しい用途においても最適です。 LTシリーズ推力比較
12
11.5 NEW LT170H2 ハイスラストタイプ
11 LT170H
10.5 LT170LDT
10 LT170LDG
LT170LDV ロングストロークタイプ
9.5
9 LT130LDG
LT150CET
8.5
LT150CEG
8 コンパクトタイプ
0 1 2 3 4 5 LT100CEG
時間(s) 0 100 200 300 400 500 600 700 800 900
10mm/s 速度安定性(測定周波数1000Hz):±1.7% 定格推力 最大推力
1 2
速度(mm/s)
速度(mm/s)
Page3
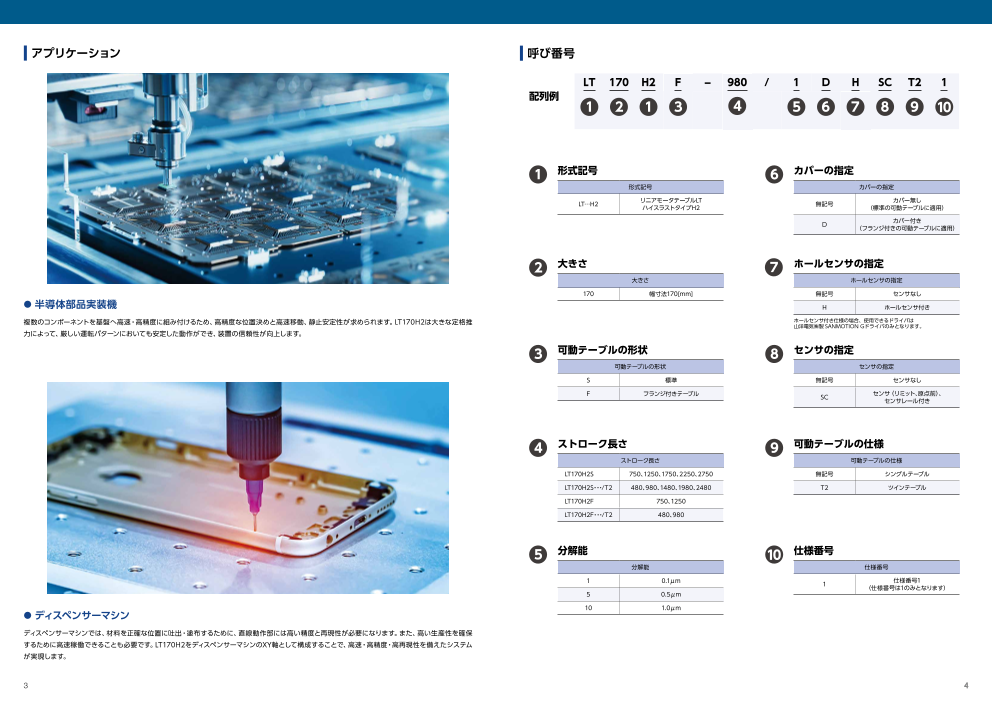
■ アプリケーション ■ 呼び番号
LT 170 H2 F - 980 / 1 D H SC T2 1
配列例
1 2 1 3 4 5 6 7 8 9 10
1 形式記号 6 カバーの指定
形式記号 カバーの指定
LT…H2 リニアモータテーブルLT
ハイスラストタイプH2 無記号 カバー無し
(標準の可動テーブルに適用)
D カバー付き
(フランジ付きの可動テーブルに適用)
2 大きさ 7 ホールセンサの指定
大きさ ホールセンサの指定
170 幅寸法170[mm] 無記号 センサなし
● 半導体部品実装機 H ホールセンサ付き
複数のコンポーネントを基盤へ高速・高精度に組み付けるため、高精度な位置決めと高速移動、静止安定性が求められます。LT170H2は大きな定格推 ホールセンサ付き仕様の場合、使用できるドライバは
山洋電気㈱製 SANMOTIONGドライバのみとなります。
力によって、厳しい運転パターンにおいても安定した動作ができ、装置の信頼性が向上します。
3 可動テーブルの形状 8 センサの指定
可動テーブルの形状 センサの指定
S 標準 無記号 センサなし
F フランジ付きテーブル SC センサ(リミット、原点前)、
センサレール付き
4 ストローク長さ 9 可動テーブルの仕様
ストローク長さ 可動テーブルの仕様
LT170H2S 750、1250、1750、2250、2750 無記号 シングルテーブル
LT170H2S・・・/T2 480、980、1480、1980、2480 T2 ツインテーブル
LT170H2F 750、1250
LT170H2F・・・/T2 480、980
5 分解能 10 仕様番号
分解能 仕様番号
1 0.1μm 1 仕様番号1
(仕様番号は1のみとなります)
5 0.5μm
10 1.0μm
● ディスペンサーマシン
ディスペンサーマシンでは、材料を正確な位置に吐出・塗布するために、直線動作部には高い精度と再現性が必要になります。また、高い生産性を確保
するために高速稼働できることも必要です。LT170H2をディスペンサーマシンのXY軸として構成することで、高速・高精度・高再現性を備えたシステム
が実現します。
3 4
Page4
■ 諸特性・精度 ■ システム構成
● 仕様・精度 LT170H2には、専用ドライバとして㈱日立産機製ADVAドライバ、山洋電気㈱製SANMOTIONGドライバが用意されており、システム構成として
パルス列仕様と高速ネットワークEtherCAT仕様の2種類を用意しております。表1にLT170H2の適用ドライバの種類を示します。
項目 形式と大きさ LT170H2 ADVAドライバ及びSANMOTIONGドライバを使用した場合のシステム構成や各ドライバの詳細仕様については次ページよりご確認ください。
最大推力 N(1) 500
定格推力 N(2) 260 表1.適用ドライバの種類
最大可搬質量 kg 40 適用ドライバの種類 仕様
分解能 μm 0.1 0.5 1.0 ADVA-08NL 単相/三相200V,750W パルス列
最高速度 mm/s(3) 690 3000 3000 ADVA-08NL EC 単相/三相200V,750W EtherCAT
繰返し位置決め精度 μm(4) ±0.5 ±0.5 ±1.0 SANMOTIONG GADSA03AAA2 単相/三相200V,30A パルス列
SANMOTIONG GADSA03AHA4 単相/三相200V,30A EtherCAT
(1)最大推力の持続時間は最大1秒です。
(2)周囲温度が0~25℃、鋼製架台に固定した場合です。 備考 表に記載のないドライバをご要望の場合は、IKOまでお問い合わせください。
(3)使用するコントローラの最大出力周波数によっては、この速度に達しない場合があります。
(4)製品本体の温度が安定した時の値を示します。
● 推力特性 ● セットアップソフトウェア
推力特性 定格推力特性 LT170H2をADVAドライバ、SANMOTIONGドライバで動作させる場合には、ドライバパラメータの初期設定が必要です。ドライバのパラメータ設定は、
600 300 セットアップソフトウェアにて行います。また、ゲイン調整や運転状況の確認に利用できます。ドライバ本体には、セットアップソフトウェア、パソコン
500 250 接続ケーブルが添付されておりません。これらは複数台のドライバで共用することが可能ですが、最低1組は必要となります。お客様の条件に合わせて
210
400 200 別途ご注文、またはご用意ください。
300 150
200 100
100 50 ● モーションネットワーク
0 0
0 500 1000 1500 2000 2500 3000 0 5 10 15 20 25 30 35 40 LT170H2のADVAドライバ、SANMOTIONGドライバは、モーションネットワークEtherCATに対応しています。モーションネットワークは、パルス列
テーブルの移動速度 mm/s 環境温度 ℃
指令でのパルスの周波数の制約、アナログ指令(電圧指令)でのノイズの影響、ケーブル長さによる電圧降下、温度ドリフトの影響を受けず、装置の高性
動的可搬質量 能化・高精度化を実現します。また、省配線が可能で、複数のテーブルの同期システムを容易に構築できます。
100 SSCNETⅢ/H、MECHATROLINK、RTEX対応のドライバもご用意していますので、ご要望の際はIKOにお問い合わせください。
10
LT170H2S
1 専用
ドライバ
LT170H2F
リニアモータテーブル
0.1
1 10 100 1000 LT170H2
加速度 m/s2 コントローラ
備考 テーブルの移動速度1000mm/sのときの推力から算出した値です。
■ センサ仕様 形式 特徴
ドイツのBeckhoffが開発したリアルタイム制御を可能にしたEthernetベースのオープンネットワーク通信です。高速通信
EtherCAT と高精度なノード間同期により装置の高性能化・高精度化を実現します。また、市販Ethernetケーブルが使用でき多様な
シングルテーブル仕様のセンサのタイミングチャート ツインテーブル仕様のセンサのタイミングチャート 配線形態に対応可能です。
SSCNETⅢ/H 三菱電機㈱が開発したサーボシステム制御のためのモーションネットワーク通信です。
光ファイバーケーブルを採用しており、従来のSSCNETに比べて耐ノイズ性が向上しています。
MECHATROLINK コントローラと各種コンポーネントを接続する、オープンフィールドネットワーク通信です。
㈱安川電機が開発し、MECHATROLINK協会によって管理されています。
RTEX(アールテックス:RealtimeExpressの略)は、サーボに要求される高度なリアルタイム性を実現するためにパナソ
RTEX ニック㈱が独自開発した先進のネットワークです。通信速度は100Mbpsと非常に高速で、市販のLANケーブルを使用でき
るため、システムコストを低く抑えることができます。
A A A
B B B
ON 原点 ON ON 原点
OFF 原点前 OFF OFF 原点前
C
OFF -方向リミット OFF C -方向リミット
ストローク長さ
OFF C
+方向リミット OFF +方向リミット
メカストッパ メカストッパ
(D) (D) (D) (D)
形式 A B C D 形式 A B C D
LT170H2 75 5 25 15 LT170H2…/T2 75 5 25 15
5 6
動的可搬質量 kg 推力 N
定格推力 N
Page5
■ システム構成
● ADVA(パルス列指令)ドライバを使用した場合のシステム構成 ● ADVA(EtherCAT通信)ドライバを使用した場合のシステム構成
シングルテーブルのシステム構成例 シングルテーブルのシステム構成例
●❾セットアップソフトウェア ●❾セットアップソフトウェア
●❷ドライバ ●❷ドライバ
パソコン パソコン
R R
●❽ ●❽
ACSERVO ACSERVO
ADV ADV 上位装置
Series Series
OPEN OPEN
● (EtherCAT対応機器)
L1C L1C 10
L2C L2C
L1 L1
L2 L2
L3 L3
CHARGE 上位装置 CHARGE ●14 上位装置
(+) (+)
RB ❼● PLC、スイッチ、センサなど RB
(-) ❼● PLC、スイッチ、センサなど
(-)
U U
V V
W ●❺ W
❶リニアモータテーブル LT170H2 ●❺ ❶リニアモータテーブル LT170H2
❹● ❹●
● ❸● ● ❸●
ツインテーブルのシステム構成例 ツインテーブルのシステム構成例
⓭ ⓮
⓭上位装置
❿ (EtherCAT 対応機器)
❿
❷ドライバ ❷ドライバ ❷ドライバ ❷ドライバ
R R
R R
⓬上位装置 ⓬上位装置
ACSERVO ACSERVO
ACSERVO ACSERVO
ADV Series ADV Series PLC、スイッチ、センサなど ADV Series ADV Series
OPEN OPEN ❿ PLC、スイッチ、センサなど
OPEN OPEN
L1C L1C L1C L1C
L2C L2C L2C L2C
L1 L1 L1 L1
L2 L2 L2 L2
L3 L3 ❽ ❺ ❾セットアップソフトウェア L3 L3 ❽ ❺ ❾セットアップソフトウェア
CHARGE CHARGE CHARGE CHARGE
(+) (+) (+) (+)
RB RB
(-) ❼ RB RB
(-) ❼ (-) ❼ (-) ❼
U U U U
V V ❻ ❶リニアモータテーブル LT170H2 V V
W W W W ❻ ❶リニアモータテーブル LT170H2
❹ ❹
A テーブル B テーブル
❹ ❹ A テーブル B テーブル
⓫ ⓫
❸ ❸
❸ ❸
No. 名称 呼び番号 No. 名称 呼び番号
●❶ リニアモータテーブル 11~12ページをご参照ください。 ●❶ リニアモータテーブル 11~12ページをご参照ください。
●❷ ドライバ ADVA-08NL ●❷ ドライバ ADVA-08NLEC
●❸ モータ中継コード TAE20V7-AM□□ ●❸ モータ中継コード TAE20V7-AM□□
●❹ エンコーダ中継コード TAE20V4-EC□□ ●❹ エンコーダ中継コード TAE20V4-EC□□
●❺ センサ中継コード TAE10V8-LC□□ ●❺ センサ中継コード TAE10V8-LC□□
●❻ リミット分岐コード(0.1m) TAE20V2-BC ●❻ リミット分岐コード(0.1m) TAE20V2-BC
●❼ I/Oコネクタ TAE20R5-CN(1) ●❼ I/Oコネクタ TAE20V5-CN(1)
●❽ パソコン接続ケーブル USBminiBケーブル
お客様でご用意ください。 ●❽ パソコン接続ケーブル USBminiBケーブル
お客様でご用意ください。
●❾ セットアップソフトウェア ProDriveNext
㈱日立産機システムのWEBサイトよりダウンロードしてください。 ●❾ セットアップソフトウェア ProDriveNext
㈱日立産機システムのWEBサイトよりダウンロードしてください。
● Ethernetケーブル ● Ethernetケーブル
● 電源コード ● 電源コード
お客様でご用意ください。
● 上位装置 ● 上位装置 お客様でご用意ください。
● I/Oコネクタ接続ケーブル ● 上位装置(EtherCAT対応機器)
注( 1) I/OコネクタTAE20R5-CNは、スリーエムジャパン㈱製10150-3000P(Eコネクタ)と10350-52F0-00(8カバー)の組合せです。 ● I/Oコネクタ接続ケーブル
備考 モータ中継コード、エンコーダ中継コード、センサ中継コード長さは、呼び番号末尾の□□にて3~10mまで1m単位で指定します。
コード長さが10m未満の場合も2桁で指定します(。3mの場合の例:TAE20V7-AM03) 注( 1) I/OコネクタTAE20V5-CNは、スリーエムジャパン㈱製10120-3000P(Eコネクタ)と10320-52F0-00(8カバー)の組合せです。
備考 モータ中継コード、エンコーダ中継コード、センサ中継コード長さは、呼び番号末尾の□□にて3~10mまで1m単位で指定します。
コード長さが10m未満の場合も2桁で指定します(。3mの場合の例:TAE20V7-AM03)
7 8
I/O ET2 ET1 PC
I/O ET2 ET1 PC
I/O ET2 ET1 PC
I/O ET2 ET1 PC
I/O ET2 ET1 PC
I/O ET2 ET1 PC
Page6
■ システム構成
● SANMOTION G(パルス列指令)ドライバを使用した場合のシステム構成 ● SANMOTION G(EtherCAT通信)ドライバを使用した場合のシステム構成
シングルテーブルのシステム構成例 シングルテーブルのシステム構成例
❷ドライバ ❷ドライバ
10セットアップソフトウェア 10セットアップソフトウェア
❾ ❾
12 15上位装置
(EtherCAT 対応機器)
14 13上位装置
PLC、スイッチ、センサなど 16 14上位装置
11 ❽ 11 スイッチ、センサなど
❽
❻ ❻
❹ ❹
❺ ❺
12 ❸ ❶リニアモータテーブル LT170H2 13 ❸ ❶リニアモータテーブル LT170H2
電源 電源
ツインテーブルのシステム構成例 ツインテーブルのシステム構成例
❷ドライバ ❷ドライバ ❾ 10セットアップソフトウェア ❷ドライバ ❷ドライバ ❾ 10セットアップソフトウェア
12
12 15上位装置
13上位装置 (EtherCAT 対応機器)
14 PLC、スイッチ、センサなど
16 14上位装置
11 ❽ 11 ❽ 11 11 スイッチ、センサなど
❸ ❸ ❸ ❽ ❸ ❽
❻ ❼ Aテーブル Bテーブル ❻ ❼ Aテーブル Bテーブル
❻
❹ ❹ ❻
❹ ❹
❺ ❺ ❺ ❺
❶リニアモータテーブル LT170H2 ❶リニアモータテーブル LT170H2
12
電源 13
電源
No. 名称 呼び番号 No. 名称 呼び番号
●❶ リニアモータテーブル 11~12ページをご参照ください。 ●❶ リニアモータテーブル 11~12ページをご参照ください。
●❷ ドライバ GADSA03AAA2 ●❷ ドライバ GADSA03AHA4
●❸ モータ中継コード TAE20V7-AM□□ ●❸ モータ中継コード TAE20V7-AM□□
●❹ エンコーダ中継コード TAE20V4-EC□□ ●❹ エンコーダ中継コード TAE20V4-EC□□
●❺ ホールセンサ中継コード TAE20V8-EC□□ ●❺ ホールセンサ中継コード TAE20V8-EC□□
●❻ センサ中継コード TAE10V8-LC□□ ●❻ センサ中継コード TAE10V8-LC□□
●❼ リミット分岐コード(0.1m) TAE20V2-BC ●❼ リミット分岐コード(0.1m) TAE20V2-BC
●❽ I/Oコネクタ TAE20R5-CN(3Mジャパン㈱製 ●❽ I/Oコネクタ AL-01131482-01(山洋電気㈱)
10150-3000PE(コネクタ)/10350-52F0-008(カバー))
●❾ パソコン接続ケーブル USBTypeCケーブル ●❾ パソコン接続ケーブル USBTypeCケーブル
お客様でご用意ください。
お客様でご用意ください。
● セットアップソフトウェア SANMOTIONMOTORSETUPSOFTWARE
● セットアップソフトウェア SANMOTIONMOTORSETUPSOFTWARE 山洋電気㈱のWEBサイトよりダウンロードしてください。
山洋電気㈱のWEBサイトよりダウンロードしてください。 ● 電源コネクタセットA AL-01135740-01(山洋電気㈱)
● 電源コネクタセットA AL-01135740-01(山洋電気㈱) ● Ethernetケーブル
● 電源コード ● 電源コード
● 上位装置 お客様でご用意ください。 ● 上位装置 お客様でご用意ください。
● I/Oコネクタ接続ケーブル ● 上位装置(EtherCAT対応機器)
備考 モータ中継コード、エンコーダ中継コード、センサ中継コード長さは、呼び番号末尾の□□にて3~10mまで1m単位で指定します。
コード長さが10m未満の場合も2桁で指定します(。3mの場合の例:TAE20V7-AM03) ● I/Oコネクタ接続ケーブル
備考 モータ中継コード、エンコーダ中継コード、センサ中継コード長さは、呼び番号末尾の□□にて3~10mまで1m単位で指定します。
コード長さが10m未満の場合も2桁で指定します(。3mの場合の例:TAE20V7-AM03)
9 10
Page7
■ 製品寸法
● LT170H2S シングルテーブル ● LT170H2F/D カバー付きシングルテーブル
(200) L (200) L
35 15 250 S 15 35 15 250 S 15
80 75 75 100 75 75
リミット
6 (1
リミット
-M8 深さ16 ) 6-M8 深さ16
n-M10通し
(上面よりM8取付け) n-M10通し
(上面よりM8取付け)
25 N K(ベッド取付穴:150ピッチ)
25 N K(ベッド取付穴:150ピッチ)
(200) L
35 15 250 S 15
(200) L 100 75 75
(200) 35 15 250 S+10 10 250 1単5位mm 単位mm
L
80 75 75
呼び番号 ストローク35長さ15 全長 250 ベッド取付穴 S 75 75 15
80 75 75 テーブル総質量 可動部質量 呼び番号 ス(ト20ロ0)ーク長さ 全長 ベッド取付穴
L テーブル総質量 可動部質量
S(2) L N K n kg kg S(2)35 15 L 250 N K S+10 1n0 k2g50 kg15
100 リミット 75 75 75 75
LT170H2S- 750 リミット 750 1100 100 900 14 25.5 LT170H2F- 750/D 750 1100 6-M8 深さ16 100 900 14 28
6.5
LT170H2S-1 250 リミット1250 1600 6-M8 深さ16(1) 50 1500 22 6-3M48 .深5さ16(1) LT170H2F-1250/D 1250 1600 50 1500 22 37
6-M8 深さ16(1)LT170H2S-1 750 1750 2100 75 1950 28 43.5 5.5 注( 2)この他のストローク長さについてはリミIKッOトにお問い合わせください。
LT170H2S-2 250 2250 2600 100 2400 34 52.5 6-M8 深さ16 6-M8 深さ16
Aテーブル Bテーブル
LT170H2S-2 750 2750 3100 50 3000 42 61.5
注( 1)取付けねじのねじ込み深さが長すぎると可動テーブルの走行性能に悪影響を与えますので、ねじ穴深さより長いボルトを挿入しないでください。
(2)この他のストローク長さについてはIKOにお問い合わせください。 Aテーブル Bテーブル
n-M10通し
n-M10通し (上面よりM8取付け)
(上面よりM8取付け) n-M10通し 25 N K(ベッド取付穴:150ピッチ)
25 N K(ベッド取付穴:150ピッチ) (上面よりM8取付け)
25 N K(ベッド取付穴:150ピッチ) n-M10通し
● LT170H2S/T2 ツインテーブル ● LT170H2F/DT2 カバー付きツインテーブル (上面よりM8取付け)
25 N K(ベッド取付穴:150ピッチ)
(200) L (200) L
35 15 250 S+10 10 250 15 35 15 250 S+10 10 250 15
80 75 75 75 75 100 75 75 75 75
リミット
6-M8 深さ16(1) 6-M8 深さ16(1)
リミット
6-M8 深さ16 6-M8 深さ16
Aテーブル Bテーブル
Aテーブル Bテーブル
n-M10通し
(上面よりM8取付け) n-M10通し
(上面よりM8取付け)
25 N K(ベッド取付穴:150ピッチ)
25 N K(ベッド取付穴:150ピッチ)
単位mm 単位mm
呼び番号 ストローク長さ 全長 ベッド取付穴 テーブル総質量 可動部質量 呼び番号 ストローク長さ 全長 ベッド取付穴 テーブル総質量 可動部質量
S(2) L N K n kg kg S(2) L N K n kg kg
LT170H2S- 480/T2 480 1100 100 900 14 31 LT170H2F-480/DT2 480 1100 100 900 14 34.5
6.5
LT170H2S- 980/T2 980 1600 50 1500 22 40 LT170H2F-980/DT2 980 1600 50 1500 22 43.5
LT170H2S-1480/T2 1480 2100 75 1950 28 49 5.5 注( 2)この他のストローク長さについてはIKOにお問い合わせください。
LT170H2S-1980/T2 1980 2600 100 2400 34 58
LT170H2S-2480/T2 2480 3100 50 3000 42 67
注( 1)取付けねじのねじ込み深さが長すぎると可動テーブルの走行性能に悪影響を与えますので、ねじ穴深さより長いボルトを挿入しないでください。
(2)この他のストローク長さについてはIKOにお問い合わせください。
11 12
20 170 (8.5) 20 20 170170 (8.(5)8.5) 20 170 (8.5)
10 150 10 10 150150 10 150
190 190190 190
30 150 30 30 150150 30 150
30 150 30 150
20 170 (8.5) 20 20 170 170 (8.5) (8.5) 20 170 (8.5)
10 150 10 10 150 150 10 150
210 210 210 210
12.5 185 12.5 12.5 185 185 12.5 185
12.5 185 12.5 185
Page8
■ ADVAの仕様 ■ SANMOTION Gの仕様
●従来のパルス列指令入力に加えて高速モーションネットワークEtherCATにも対応。 ●新開発の電流制御により、高応答制御(速度周波数応答3.5kHz)を実現。
●イ ンテリジェント端子で、10入力端子及び6出力端子、アナログ入力0~±10Vの制御が可能です。 ●クーロン摩擦、粘性摩擦、重力を高精度に検出して補償することで、位置決め整定時間を短縮します。
●高い制御性により整定時間を短縮し、生産性の更なる向上を実現します。 ●機械の周波数特性を高精度に計測し、最適なサーボパラメータを自動調整するため、立上げが容易です。
●セットアップソフトウェアのパラメータ設定、モニタ表示、運転トレースやオートチューニング機能などにより機械の診断やリニアモータの立ち上げ・ ●ドライバ設定支援ソフトにより、パラメータ設定、状態表示、各種診断によるチューニング、試運転、運転トレース等が可能です。
調整が容易に行えます。
55 170
49 φ6 50 130 (5) (5) 40 5
(5) M4ねじ
(付属品)
6 4 5
呼び番号 ADVA-08NL (パルス列/アナログ) 呼び番号 GADSA03AAA2( パルス列/アナログ)
項目 ADVA-08NLEC(EtherCAT) 項目 GADSA03AHA4( EtherCAT)
入力電源 単相/三相AC200~230V
50/60Hz 入力電源(1) 単相/三相:AC200~240V( +10,-15%) 50/60Hz(±3Hz)
基 DC:DC300V(±20%)
基 本
本 定格電流/瞬時電流 5.1Arms/15.3Arms 仕 定格電流/瞬時電流 5.2Arms/16.3Arms
仕 電源設備容量 1.3kVA 様 電源設備容量 2.4kVA
様
保護構造(1) 半閉鎖型IP20 制御モード 位置制御/速度制御/推力制御( パラメータ切り換え)
制御モード 位置制御/速度制御/推力制御 速度指令 アナログ入力:0~±10V・最高速度(ゲイン設定可) orEtherCAT
速度指令 アナログ入力:0~±10V・最高速度(ゲイン設定可) or EtherCAT 推力指令 アナログ入力:0~±10V・最高推力(ゲイン設定可) orEtherCAT
推力指令 アナログ入力:0~±10V・最高推力(ゲイン設定可) or EtherCAT
入 位置指令 ラインドライバ信号:4Mpps(非絶縁入力・4逓倍後)
入 オープンコレクタ信号:4Mpps(絶縁入力・4逓倍後) or Et he rC A T
出 出
力 位置指令 ラインドライバ信号:20Mpps(非絶縁入力・4逓倍後)
オープンコレクタ信号:2Mpps(絶縁入力・4逓倍後) or EtherCAT 力 [入力]8入力端子をパラメータで機能選択
関 関
係 [入力]インテリジェント端子で、10入力端子(EtherCAT仕様は6入力端子)をパラメータで機能選択 係 DC5V±5%、DC12~24V±10%接点信号/オープンコレクタ信号入力(シンク型、ソース型)
機 DC12・24V接点信号/オープンコレクタ信号入力(内部DC24V電源供給あり) 機 接点入出力 EtherCAT仕様は2入力がフォトカプラ入力(独立した電源が使用可)
能 接点入出力 能
[出力]インテリジェント端子で、6出力端子(EtherCAT仕様は4出力端子)をパラメータで機能選択 [出力]8出力端子(EtherCAT仕様は2出力端子)をパラメータで機能選択
(オープンコレクタ信号出力:シンク出力) オープンコレクタ信号出力(シンク型、ソース型)
パルス列指令仕様:5桁数字表示器、5キー押しボタン/ディップスイッチ(モドバス通信の設定) アナログモニタ 2ch出力(X11) 2.0V±10% : 速度、電流、その他をパラメータで選択可
内蔵オペレータ
EtherCAT仕様:2桁数字表示器、ディップスイッチ(EtherCATのノードアドレス設定) デジタルオペレータ パルス列/アナログ:状態表示、パラメータ設定、調整モード、試運転モード、アラーム履歴表示、モニタ表示、モータコード設定
EtherCAT:状態表示、調整モード、アラーム履歴表示、モニタ表示
外部オペレータ Windows( 32bit,64bit)パソコン接続可能(USB2.0FULLSPEED) 外部オペレータ Windows( 32bit,64bit)パソコン接続可能(USBTypeC)
内 回生制動回路 内蔵
部 回生処理回路 内蔵
機 ダイナミックブレーキ(2) 内蔵(動作条件は設定可) 内
能 部 ダイナミックブレーキ回路 内蔵
過電流、過負荷、制動抵抗器過負荷、主回路過電圧、メモリ異常、主回路不足電圧、CT異常、CPU異常1、 機
外部トリップ(モータ温度異常)、サーボON時地絡検出、制御回路不足電圧、サーボアンプ温度異常、駆動禁止異常、 能 出力パワーデバイス異常(過電流)、電流検出異常、安全トルク遮断異常、冷却ファン停止、過負荷、回生過負荷、
保護機能 パワーモジュール異常、セーフティ回路異常、緊急遮断、エンコーダ異常、アンマッチエラー、電源再投入要求、 磁極位置推定異常、連続回転速度過大、過熱異常、外部異常、サーボアンプ温度異常、過電圧、主回路不足電圧、主回路電源欠相、
磁極位置推定異常、磁極位置推定未実行、位置偏差異常、速度偏差異常、過速度異常、瞬時停電、主回路電源異常、駆動範囲異常 保護機能 主回路電圧検出異常、突入防止時間異常、制御電源異常、制御回路不足電圧、エンコーダ異常、過速度、速度制御異常、
(ネットワーク通信異常、DC同期異常、不足電圧表示) 速度フィードバック異常、モデル追従制振制御異常、位置偏差過大、位置指令異常、軸間同期誤差過大、デュアル位置誤差過大、
デュアル位置フィードバック異常、アンプ間通信異常、位置偏差差異過大、メモリ異常、CPU異常、パラメータ異常、
使用周囲温度/保存温度(3) 0~55℃/-10~70℃ 制御回路異常、タスク処理異常
使
用 使用湿度 20~90%RH( 結露のないこと) 使用周囲温度/保存温度(2) 0~60℃/-20~65℃
環
境 耐振動(4) 5.9m/s2(0.6G) 10~55Hz 使 使用湿度 95%RH以下(結露のないこと)
使用場所 標高1000m以下 屋内( 腐食ガス、塵埃のないところ) 用 耐振動 6m/s2(衝撃20m/s2環 )
質量 1.2kg 境 標高 2000m以下
注( 1)保護方式はJEM1030に準拠します。 過電圧カテゴリー Ⅲ
(2)ダイナミックブレーキは非常停止用としてお使いください。
(3)保存温度は輸送中の温度です。 質量 0.9kg
(4) JISC60068-2-6:2010に準拠します。
注( 1)単相、DCでご使用になる場合は、パラメータ設定をしてください。
(2)+55℃~+60℃または1000~2000mの場合は、減定格することで使用可能です。
13 14
150 5
160
160
(3) 152 5