




多様化するIoTのニーズに確実に対応する産業用コントローラ
情報をも制御するIoT対応産業用コントローラ「HXシリーズ」
近年、工場のIoT化、スマート化の進行に伴い、オートメーション産業はハードウェアドリブンシステムからソフトウェアドリブンシステムへと急速に変化を遂げつつあります。
そのなかでオートメーションシステムに使用されるPLC(プログラマブルコントローラ)やIPC(産業用コンピュータ)には、現場環境で使える信頼性や高度な制御機能だけでなく、設備機器の情報をクラウドや上位システムにシームレスに伝えることが求められています。
HXシリーズは、オープン化、高性能化、シンプル化でその要求に応えながら、プログラミングの生産性向上、効率化に貢献します。
◆詳細はカタログをダウンロードしご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | 日立IoT対応産業用コントローラ HXシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.7Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社日立産機システム (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page2
スライド 1
情報をも制御するIoT対応産業用コントローラ「HXシリーズ」
近年、工場のIoT化、スマート化の進行に伴い、オートメーション産業はハードウェアドリブン
システムからソフトウェアドリブンシステムへと急速に変化を遂げつつあります。
そのなかでオートメーションシステムに使用されるPLC(プログラマブルコントローラ)やIPC
(産業用コンピュータ)には、現場環境で使える信頼性や高度な制御機能だけでなく、
設備機器の情報をクラウドや上位システムにシームレスに伝えることが求められています。
HXシリーズは、オープン化、高性能化、シンプル化でその要求に応えながら、プログラミング
の生産性向上、効率化に貢献します。
※IoT: Internet of Things(モノのインターネット)
「Programmable Logic Controller」を超越した
「Programmable Automation Controller」
オープン化
国際標準であるIEC61131-3規格に準拠するプログラミング言語をサポートすることで、グローバルでのプログラミング技術者が確保でき、グ
ローバル生産体制の構築を支援します。また、産業用オープンネットワークであるEtherCAT、Ethernet/IPをサポートすることで、多くのフィー
ルドネットワーク対応の設備機器につながり、インダストリー4.0推奨標準通信規格OPC UAによってデータをシームレスにクラウドまで伝送でき
る環境構築を可能とします。
高性能化
近年の処理速度が高速化したMPU性能を生かし、ソフトウェアPLCであるCODESYSを搭載することにより、1つのCPUモジュールにて、
決められた順序に従って制御を行うシーケンス制御と、センサと同期させた高度なモーション制御を同時に実行できます。
シンプル化
PLCとIPCの機能を併せ持つ産業用コントローラです。従来に比べ導入・開発・メンテナンスコストなどのTCO縮減と省スペース化が図れます。
- 1 -
Page3
スライド 2
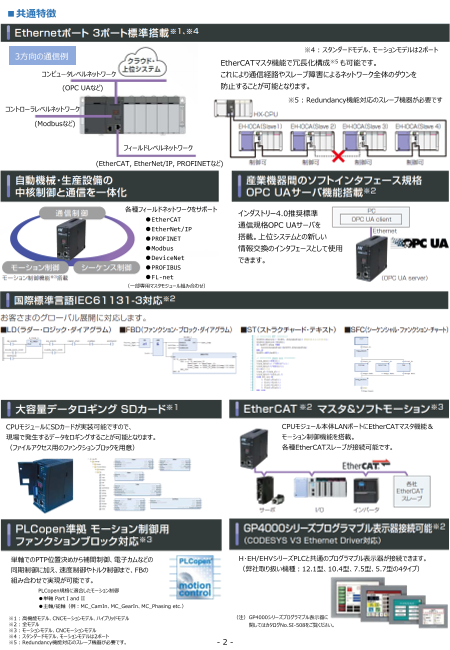
■共通特徴
※4 : スタンダードモデル、モーションモデルは2ポート
3方向の通信例
EtherCATマスタ機能で冗長化構成※5 も可能です。
コンピュータレベルネットワーク これにより通信経路やスレーブ障害によるネットワーク全体のダウンを
(OPC UAなど) 防止することが可能となります。
※5 : Redundancy機能対応のスレーブ機器が必要です
コントローラレベルネットワーク
(Modbusなど)
フィールドレベルネットワーク
(EtherCAT, EtherNet/IP, PROFINETなど)
各種フィールドネットワークをサポート
インダストリー4.0推奨標準
●EtherCAT
通信規格OPC UAサーバを
●EtherNet/IP
●PROFINET 搭載。上位システムとの新しい
●Modbus 情報交換のインタフェースとして使用
●DeviceNet できます。
●PROFIBUS
●FL-net
(一部専用マスタモジュール組み合わせ)
CPUモジュールにSDカードが実装可能ですので、 CPUモジュール本体LANポートにEtherCATマスタ機能&
現場で発生するデータをロギングすることが可能となります。 モーション制御機能を搭載。
(ファイルアクセス用のファンクションブロックを用意) 各種EtherCATスレーブが接続可能です。
単軸でのPTP位置決めから補間制御、電子カムなどの H・EH/EHVシリーズPLCと共通のプログラマブル表示器が接続できます。
同期制御に加え、速度制御やトルク制御まで、FBの (弊社取り扱い機種:12.1型、10.4型、7.5型、5.7型の4タイプ)
組み合わせで実現が可能です。
PLCopen規格に適合したモーション制御
●単軸 Part I and II
●主軸/従軸(例:MC_CamIn、MC_GearIn、MC_Phasing etc.)
※1 : 高機能モデル、CNCモーションモデル、ハイブリッドモデル (注)GP4000シリーズプログラマブル表示器に
※2 : 全モデル 関してはカタログNo.SI-508をご覧ください。
※3 : モーションモデル、CNCモーションモデル
※4 : スタンダードモデル、モーションモデルは2ポート
※5 : Redundancy機能対応のスレーブ機器が必要です。 - 2 -
Page4
スライド 3
(注)詳細な仕様については必ずマニュアルにてご確認ください。
項目 モデル名 スタンダードモデル モーションモデル 高機能モデル CNCモーションモデル ハイブリッドモデル
[CPUモジュール単体型式] HX-CP1S08 HX-CP1S08M HX-CP1H16 HX-CP1H16M HXC-CP1H16
[スタンドアロンキット型式] HX-CP1S08-0 HX-CP1S08M-0 HX-CP1H16-0 HX-CP1H16M-0 HXC-CP1H16-0
ユーザプログラムメモリ 8MB 16MB
データメモリ(非保持) 8MB 16MB
データメモリ(停電保持:RETAIN+PERSISTENT) 0.5MB 2MB
増設段数 5
増設ケーブル 局間0.5 m,1 m,2 m 総延長最大8 m
I/O点数(64点ユニット使用時) 4,224点
I/Oモジュール EHVシリーズと共通
ビット演算 1.0 ns~
命令処理時間
倍精度実数演算 6.6 ns~
入出処理方式 リフレッシュ処理
プログラム言語 IEC61131-3準拠5言語(LD/FBD/SFC/IL/ST)+ CFC(Continuous Function Chart)
C言語プログラム - ○
ソフトモーション - ○ - ○ -
CNC/Gコード・Robotics - ○ -
OPC UAサーバ ○
Web Visualization - ○
暗号化通信 ○ (OPC UAサーバ) ○ (OPC UAサーバ および Web Visualization)
NTPクライアント(時刻取得) ○
DNSクライアント ○
FTPサーバ・クライアント ○
SFTPサーバ・クライアント ○
サポート通信機能 EtherCATマスタ ○ (通信周期:1ms~, 最大スレーブ台数 : 255台)
Redundancy EtherCAT ○
EtherNet/IPスキャナ ○
PROFINETマスタ ○
Modbus-TCPサーバ・クライアント ○
Modbus-RTUマスタ・スレーブ - ○
Modbus-ASCIIマスタ - ○
Modbus-TCP/RTUゲートウェイ - ○
Ethernetポート 2ポート (10/100BASE-T/TX) 3ポート (10/100BASE-T/TX)
通信インタフェース シリアル - 1ポート(RS-485)
USBデバイス(PC接続) 1ポート(Type Mini-Bタイプコネクタ, USB 2.0 High speed):HX-CODESYS接続用
USBホスト(USBメモリ) 1ポート(Type Aコネクタ,USB 2.0 High speed):USBメモリ接続用
外部記憶
SDカードスロット - 1スロット(SD / SDHC)
カレンダ時計 サポート(時計IC内蔵,周囲温度25 ℃ ±60秒/月 停電保持時間 7日[バッテリ無])
バッテリ型式※ オプション品:HX-BAT(カレンダ時計用)
電源二重化 ○
保守機能 自己診断(マイコン異常, ウォッチドッグタイマ異常, メモリ異常,バッテリ異常, 他)
(1) 外部からの不正アクセス防止
・外部からの不正パケット防止/検知
・不正なリモートログイン防止
セキュリティ保護支援機能 ・攻撃者への情報/機能漏洩防止
(2) アクセスユーザ管理
・ログイン認証、ユーザ&グループ管理、アクセス権限設定
(3) 専用機能ライブラリ化(非表示化)
※カレンダ時計データ保持のためにのみバッテリが必要です。
NTPサーバと時刻同期を図る場合、ならびにユーザプログラム・停電保持属性データメモリ保持にはバッテリを必要としません。
- 3 -
Page5
スライド 4
CPUモジュールの単独動作可能。外部I/O信号の直接入出力を必要としない用途に好適です。
●IoTゲートウェイ用途
●エッジコンピューティング用途
●通信インタフェース用途
●フィールドネットワークマスタ用途
●EtherCATモーションコントローラ用途
●Webサーバ(Web Visualization)用途 など
■DINレールに直接取り付け可能
DC24Vを直接給電可能なため、従来のように電源モジュール、I/O
モジュールの実装スペースが不要となり省スペース化が可能です。
外部電源(お客さまでご用意ください)
また、CPUモジュールを35mm幅DINレールに直接取り付けできるように
・ DC24V電源 : 出力DC24V、0.6A以上
なるため制御盤への取り付けが可能です。 ・ ACアダプタ : 出力DC12V、1.0A以上、φ5.5×2.1プラグ
■ACアダプタで給電可能 (センタープラス)
(注)実際のフィールドでの使用時は、ACアダプタ給電で使用しないでください。
ACアダプタ(市販品)でも給電可能。取り付ける設備・機械装置の ACアダプタ給電は事務所などでのプログラム作成やデバッグまでにとどめてください。
ない場所(例えば事務所など)でACアダプタを使用してプログラム
作成やデバッグを行うことが可能です。
■汎用Webブラウザで遠隔監視・リモートメンテナンスを実現
専用HMIを用意することなく、汎用のWebブラウザでCPUモジュール
内蔵のWebサーバにアクセスし、モニタが可能です。監視用の専用
端末を不要とし、現場での担当者の負担を軽減できます。
1台のCPUモジュールで制御プログラムと情報処理プログラム(C言語プログラム)の実装と動作が可能 (ハイブリッドモデル)
■1台のCPUモジュールでコントローラの制御を ■最大4本の情報処理プログラムを仮想コントローラとして
阻害することなく情報処理プログラムの実装と 並列動作可能
動作が可能です。
最大4本のC言語プログラムを実装可能で、
それぞれが独立・非同期に並列動作可能です。
項目 仮想コントローラ仕様
プログラム開発環境 エンジニアリングツール HX-Studio
プログラム書込み方法 内蔵WebサーバIFまたはHX-Studioからのダウンロード
プログラム言語 C言語(C/C++)
接続方法 Ethernet
アプリケーションプログラム CPUモジュールのバージョンよって異なる
容量 (SDカード/USBメモリも指定可)
仮想コントローラ数 CPUモジュール内 最大 4個(1/2/4から選択)
ワークRAM 最大 512Mbyte(512/ 256×2 /128×4から選択)
書込み:最大点数 5,000変数、最大サイズ 64KB
制御プログラムとの
読出し:最大点数 5,000変数、最大サイズ 64KB
共有データ
ファイル共有、最大サイズ 64MB
SDカード、Ethernet ポート、
アクセス範囲 シリアルポート(RS-485)、USB(ホスト)、
CPUモジュール内データメモリ(制御プログラム指定変数)
セキュリティ保護 認証・暗号化(IPsec)
- 4 -
Page6
スライド 5
シリーズ・ シリーズ 制御処理プログラム開発環境
HX-CODESYS
CODESYSは国際標準規格IEC61131-3
準拠プログラム言語の統合開発環境です。
全世界で350社以上のコントローラメーカ
とさまざまな業種の数万を超えるエンド
ユーザで使用実績がある、最先端クラスの
PLCアプリケーション開発ツールです。
プロジェクトツリー構造でアプリケーションのデバイス、タスク、プログラム等を一括管理
EtherCAT・Modbusコンフィグレータ内蔵のためスレーブ機器のI/Oもタグ名称で一元管理
国際標準規格IEC61131-3準拠の5つのプログラミング言語
ツール表示言語は日本語・英語の他にドイツ語・フランス語・イタリア語・スペイン語・ロシア語・中国語、計8カ国語
IEC61131-3(3rd エディション)準拠のオブジェクト指向プログラミングが可能
入力アシスト、文法チェック、デバッグ機能、シミュレーション等の多彩な機能で開発効率UP
スキルや用途に合わせて選べるIEC61131-3準拠 5言語 + CFC
■LD(ラダー・ロジック・ダイアグラム) ■FBD(ファンクション・ブロック・ダイアグラム)
リレー回路をベースと データや信号の流れが見
したグラフィック言語。 やすいグラフィック言語。
インターロック処理な
どのビット演算に向い
ている。
■ST(ストラクチャード・テキスト) ■IL(インストラクション・リスト)
PASCAL言語をベース 従来型PLC向きの命令語(ニーモ
としたテキスト言語。 ニック)テキスト言語。高速演算や
分岐・繰り返し・数値演算 短いプログラム向き。
などののLDが苦手とする用
途に最適。
■SFC(シーケンシャル・ファンクション・チャート) ■CFC(コンティニュアス・ファンクション・チャート)
状態遷移を表現できる POUのレイアウトや接続に制限のないグラフィックFBDエディタ。
グラフィック言語。工程 出力から入力へのフィードバックが可能。
進捗向き。各ステップ内 (非IEC61131-3言語)
のプログラムはL D 、
FBD、ST、ILで記述。
品名 型式 仕様
統合開発環境 HX-CDS 統合開発環境 HX-CODESYS (IEC61131-3準拠プログラム言語)
エンジニアリングツール HX-STD HXハイブリッドモデル用統合開発環境 HX-Studio(HX-CODESYS同梱)
- 5 -
Page7
スライド 6
ソフトウェア開発コストを縮減
■ローカル変数・グローバル変数
各プログラムのみで有効なローカル変数と全プログラムで共通の
グローバル変数が定義できます。ローカル変数とグローバル変数
を使い分けることで再利用性の高いアプリケーションプログラムを Main_PRG SUB_C SUB_D
---
作成することができます。 --- SUB_A SUB_D( ); LD a
SUB_A( );
--- --- AND b
---
■構造化プログラミング SUB_C( ); --- OR c
---
--- SUB_E( ); ST d
---
---
IF a>10 THEN
プログラムやファンクションブロックを階層化してプログラミングで SUB_B
SUB_B( ); SUB_E
END_IF
きます。これによりアプリケーションプログラムの可読性が高まり、 SUB_F
---
---
メンテナンス性・信頼性の向上が図れ、結果的にアプリケーションの I:=I+1;
---
開発効率が高まります。
■ライブラリ化
よく使う処理をファンクションブロック化してライブラリに登録すれ
ば、他のアプリケーションプログラムで再利用することができます。
処理の中身を非表示化することもできるため、部品としてエンド
ユーザに配布することもできます。
充実したライブラリ 便利な機能
IEC61131-3標準命令の他にもPIDや各種変換命令等、 各種便利な機能でプログラミング効率、デバッグ効率を向上させ
便利で使いやすい命令が標準ライブラリとして組み込まれています。 ます。
●PID制御 ●文字列操作 ●自動入力補完機能や入力アシスタント機能で入力ミスによるコン
●スルーレート出力 ●アナログヒステリシス パイルエラーを防ぎます。
●ASCII変換/BCD変換 ●最小/最大/平均/分散 ●命令語は自動的に色が変わり、対応するカッコはハイライト表示さ
●グレーコード変換 etc. れます。
●LD、FBDエディタではST言語を組み合わせることも可能です。
●右クリックで任意の回路をコメントアウトできます。
強力なデバッグ機能が立ち上げコストを圧縮します。
●オンラインモニタ
●オフラインシミュレーション
●ブレークポイント
●フォース
●シングルステップ実行
●シングルサイクルスキャン
●フローコントロール
●RUN中変更
●トレース
●ビジュアリゼーション
●Webビジュアリゼーション
- 6 -
Page8
スライド 7
PLCopen準拠モーション制御用ファンクションブロック使用可能
モーション制御機能 (モーションモデル、CNCモーションモデルに搭載)
PLCopen Motion Control のファンクションブロック使用可能
EtherCATでサーボを接続してモーション制御可能
シンプルな単軸の制御はもちろんのこと、複数軸の同期制御も電子カムの機能で位置、速度、加速度をグラフィカルなエディタで
自由にプログラム可能
仮想軸の機能を利用することで実際のドライブを接続しなくても動作のシミュレートが可能
PLC機能(シーケンス制御機能)と組み合わせることにより、I/O制御からロボット制御まで1台で実現可能
●豊富なモーションファンクションブロックで単軸のPTP制御から複数軸の ●軸グループによる多軸協調制御のサポートにより、ロボット制御など座標系の
同期制御まで、幅広い用途。 モーション動作を実現可能。
●直感的に動きをイメージしやすいグラフィカルなカムエディタで電子カムの ●Roboticsライブラリのサポートにより線形補間命令、円弧補間命令を使用した
プログラミングが可能。 軸グループの補間動作を実現可能。
●Gコードによるグラフィカルな3D表示や表形式による座標入力で軌跡制御
プログラミングが可能。
●DXF形式のCADファイルからGコードデータへの変換が可能。
●台形加減速、S字加減速、ジャーク制御加減速(遅れ込め制御)など
異なる速度プロファイルをサポート。
●ツール径補正、エッジスムージング、確度に応じた動作継続設定など加工機に
求められる動きを実現。
モーションモデル
CNCモーションモデル •通信周期はEtherCATマスタならびに
スレーブの仕様に依存します。
(株)日立産機システム製EtherCAT対応サーボシステム ADVシリーズ
項目 仕様
制御モード 位置制御、速度制御、トルク制御
軸種別 ドライブ軸、仮想軸、エンコーダ軸
絶対値位置決め 絶対位置座標で目標位置を指定(MC_MoveAbsolute)
相対値位置決め 現在位置を起点とした相対位置で目標位置を指定(MC_MoveRelative)
位置制御 目標位置変更 直前の位置指令に相対距離を加算する。(MC_MoveAdditive)
重畳位置決め 直前の位置指令に相対距離と速度を重畳する。(MC_MoveSuperImposed)
位置プロファイル移動 指定された時間-位置プロファイルに従って動作する。(MC_PositionProfile)
単軸 速度制御 目標速度を指定(MC_MoveVelocity)
速度制御
速度プロファイル移動 指定された時間-速度プロファイルに従って動作する。(MC_VelocityProfile)
トルク制御 トルクを指定(SMC_SetTorque)
停止 動作を停止する。(MC_Halt)
その他 強制停止 動作を停止する。命令実行中に他の命令が割り込むことはできない。(MC_Stop)
加速度プロファイル移動 指定された時間-加速度プロファイルに従って動作する。(MC_AccelerationProfile)
従軸が主軸(実軸または仮想軸)に対してある位置関係を保ちながら動作する。
カム動作 位置関係はユーザがグラフまたは数値にて作るカムテーブルで定義される。
(MC_CamIn、MC_CamOut、MC_CamTableSelect)
主軸(実軸または仮想軸)と従軸が指定した速度比率で動作する。
多軸 ギア動作
(MC_GearIn、MC_GearOut、MC_GearInPos)
主軸の位置に応じてデジタル出力を制御する。
タペット
位置とデジタル出力の関係はユーザがタペットテーブルで定義する。(MC_CamTappetAction)
相対値主軸位相補正 主軸、従軸の位相差を絶対値で補正する。(MC_Phasing)
- 7 -
Page9
スライド 8
信頼と実績のEHVシリーズとの共通の各種機能モジュール
(注)各モジュールの性能仕様、電気的仕様などについては必ずマニュアルにてご確認ください。
■8点/16点入力モジュール ■8点/16点出力モジュール
(着脱端子台) (着脱端子台)
EH-XD8 : DC24V入力 8点、応答時間5ms EH-YT8 : DC12/24V Tr出力 8点、シンクタイプ
EH-XD16 : DC24V入力 16点、応答時間5ms EH-YT16 : DC12/24V Tr出力 16点、シンクタイプ
EH-XDL16 : DC24V入力 16点、応答時間16ms EH-YTP8 : DC12/24V Tr出力 8点、ソースタイプ
EH-XDS16 : DC24V入力 16点、応答時間1ms EH-YTP16 : DC12/24V Tr出力 16点、ソースタイプ
EH-XDA16 : DC48V入力 16点、応答時間5ms EH-YTP16S: DC12/24V Tr出力 16点、ソースタイプ
EH-XA16 : AC100~120V入力 16点、 (短絡保護付き)
応答時間15ms (OFF→ON)、 EH-YTA16 : DC24/48V Tr出力 16点、シンクタイプ
25ms (ON→OFF) EH-YTPA16: DC24/48V Tr出力 16点、ソースタイプ
EH-XAH16 : AC200~240V入力 16点、 EH-YR12 : AC100~240V/DC24V Ry出力 12点
応答時間15ms (OFF→ON)、 EH-YR16 : AC100~240V/DC24V Ry出力 16点
25ms (ON→OFF) EH-YR16D : AC100~240V/DC24V Ry出力 16点
(2コモン)
EH-YR8B : AC100~240V/DC24V Ry出力 8点
(独立)
EH-YS16 : AC100/240V トライアック出力 16点
■32点入力モジュール ■32点出力モジュール
(40pinコネクタ) (40pinコネクタ)
EH-XD32 : DC24V入力 32点、応答時間5ms EH-YT32 : DC12/24V Tr出力 32点、シンクタイプ
EH-XDL32 : DC24V入力 32点、応答時間16ms EH-YTP32 : DC12/24V Tr出力 32点、ソースタイプ
EH-XDS32 : DC24V入力 32点、応答時間1ms (短絡保護付き)
EH-XDB32 : DC12V入力 32点、応答時間5ms
EH-XDBL32 : DC12V入力 32点、応答時間16ms
■64点入力モジュール ■64点出力モジュール
(40pinコネクタ×2) (40pinコネクタ×2)
EH-XD64 : DC24V入力 64点、応答時間1ms EH-YT64 : DC12/24V Tr出力 64点、シンクタイプ
EH-XDL64 : DC24V入力 64点、応答時間16ms EH-YTP64 : DC12/24V Tr出力 64点、ソースタイプ
EH-XDB64 : DC12V入力 64点、応答時間1ms (短絡保護付き)
EH-XDBL64 : DC12V入力 64点、応答時間16ms
■32点入力モジュール ■32点出力モジュール
(40pinバネクランプ式端子台) (40pinバネクランプ式端子台)
EH-XD32E : DC24V入力 32点、応答時間1ms EH-YT32E : DC12/24V Tr出力 32点、シンクタイプ
EH-XDL32E : DC24V入力 32点、応答時間16ms EH-YTP32E : DC12/24V Tr出力 32点、ソースタイプ
(短絡保護付き)
- 8 -
Page10
スライド 9
(注)各モジュールの性能仕様、電気的仕様などについては必ずマニュアルにてご確認ください。
■アナログ入出力モジュール
(着脱端子台)
EH-AX44 : 12bit電流/電圧入力、4~20mA 4ch.、 EH-AY22 : 12bit電流/電圧出力、4~20mA 2ch.、
0~10V 4ch. 0~10V 2ch.
EH-AX8V : 12bit電圧入力、0~10V 8ch. EH-AY2H : 12bit電圧出力、-10~10V 2ch.
EH-AX8H : 12bit電圧入力、-10~10V 8ch. EH-AY4V : 12bit電圧出力、0~10V 4ch.
EH-AX8I : 12bit電流入力、4~20mA 8ch. EH-AY4H : 12bit電圧出力、-10~10V 4ch.
EH-AX8IO : 12bit電流入力、0~22mA 8ch. EH-AY4I : 12bit電流出力、4~20mA 4ch.
EH-AXH8M : 14bit電流/電圧入力、0~10V/-10~10V/ EH-AYH8M : 14bit電流/電圧出力、0~10V/0~22mA/
0~22mA/4~22mA 8ch. 4~22mA 8ch.
EH-AXG5M : 12/16bit電流/電圧入力、ch.間絶縁、 EH-AYG4M : 12/16bit電流/電圧出力、ch.間絶縁、
0~10V/-10~10V/0~22mA/ 4~22mA 5ch. 0~10V/-10~10V/0~22mA/4~22mA 4ch.
EH-TC8 : 15bit熱電対(K、E、J、T、B、R、S、N)入力8ch.
EH-PT4 : 15bit測温抵抗体(Pt100/1000)入力4ch.
EH-RTD8 : 15bit測温抵抗体(Pt100/1000)入力6/8ch.
■32点入力/出力モジュール
(EM/H-200互換コネクタ)
EH-XD32H : DC24V入力 32点、シンクタイプ、応答時間4ms
EH-YT32H : DC5/12/24V Tr出力 32点、シンクタイプ
■TTL入出力モジュール ■カウンタモジュール
EH-MTT32 : 16点、DC4~27V シンク入力、 EH-CU : 2ch.カウンタ入力、最大100kHz
16点、DC4~27V シンク出力 EH-CUE : 1ch.カウンタ入力、最大100kHz
EH-MTT32A : 16点、DC3~15V シンク入力、
16点、DC4~15V シンク出力
EH-XTT32 : 32点、DC3~15V シンク入力、
入力遅延時間 1ms 以下
EH-YTT32 : 32点、DC4~15V シンク出力、
出力遅延時間 1ms 以下
■CPUリンクモジュール ■シリアル通信モジュール
: 同軸ケーブル(インピーダンス50Ω) EH-SIO: 2ポート
EH-LNK
リンクエリア1Kワード (RS-232C/RS-422/RS-485選択)
EH-OLNK : 光ケーブル(SGI-185/230)
リンクエリア1Kワード
- 9 -
Page11
スライド 10
(注)各モジュールの性能仕様、電気的仕様などについては必ずマニュアルにてご確認ください。
■FL-netインタフェースモジュール ■EtherCATスレーブコントローラ
EEH-FLN3: FL-net Ver.3.01 class1、 EH-IOCA : 最大入出力点数 1,408点
10M/100Mbps (アナログ 176ch.)
■DeviceNetマスタモジュール/ ■PROFIBUS-DP
スレーブコントローラ マスタモジュール/
スレーブコントローラ
EH-RMP2 : マスタモジュール、
EH-RMD2 : マスタモジュール、
最大8台/1CPUモジュール
最大8台/1CPUモジュール
EH-IOCP2 : スレーブコントローラ、
EH-IOCD2 : スレーブコントローラ、
最大入出力点数 1,408点
最大入出力点数 1,408点
(アナログ 176ch.)
(アナログ 176ch.)
■サブCPUモジュール 〜情報系と制御系との融合〜
HXC-SCP
・耐環境性・耐ノイズ性・長期供給の課題を解決し、制御系の現場環境で情報系との密結合を実現します。
・制御データは専用ライブラリを使って情報処理アプリケーションと共有できます。
・情報処理アプリケーションは PLC の演算処理とは独立してサブ CPU モジュールで実行されます。
・情報処理アプリケーションの開発に適した専用の C/C++言語プログラム開発が可能です。
・C/C++言語プログラムに加えて Python 標準モジュールが工場出荷時状態で使用可能です。
・パッケージマネージャを使用してシステムに必要なコマンドやライブラリを追加できます。
対応 CPUモジュール:HXシリーズ(ファームウェアバージョン 3.5.16.23以降)
Ethernet ポート数:2
USB ポート:USB メモリ接続用( Type A コネクタ)
PLC プログラムとのデータ共有:X1024 W / Y1024W
仮想コントローラディスク容量:最大 1.9 GB
仮想コントローラメモリ容量:1024 MB
■EtherCATスレーブモジュール
HX-ECTS
・HX / EHV+ / EHV シリーズ と組み合わせ可能 で、 EtherCAT スレーブ側へプログラミングすることが可能となります。
・EtherCAT通信データサイズ最大 512W(入力)/512W(出力)をサポート。
装置制御パラメータやレシピデータ等を一括転送することが可能です。
・EtherCAT をサポートしており、 各社 EtherCAT 対応製品と接続可能です。
通信周期は 最大 400us(512 ワード時)まで対応 ※。
※EtherCAT マスタ仕様に依存します。
通信プロトコル:EtherCAT専用プロトコル
通信周期:400μs 以上
対応 CPUモジュール:HX シリーズ / EHV+シリーズ / EHV シリーズ
実装可能台数:2 台/1CPUモジュールまたは8 台/1CPUモジュール
通信サイズ:512W/ 512W、256W/256W、64W/64W (選択)
- 10 -
Page12
スライド 11
(注)各モジュールの性能仕様、電気的仕様などについては必ずマニュアルにてご確認ください。
【入出力モジュール用オプション】
■32点・64点コネクタタイプ入出力モジュール用中継端子台/接続ケーブル
HPX7DS-40V6 : 40P中継端子台 (注)64点コネクタタイプ入出力モジュールにご使用の場合には、
中継端子台と接続ケーブルが2セット必要になります。
[両端コネクタ付き接続ケーブル]
EH-CBM01W : 1m
EH-CBM03W : 3m
EH-CBM05W : 5m
EH-CBM10W : 10m
[片端コネクタ/片端バラ線接続ケーブル]
EH-CBM01 : 1m
EH-CBM03 : 3m
EH-CBM05 : 5m
EH-CBM10 : 10m
■8点・16点端子台タイプ入出力モジュール用ハーフサイズ端子台カバー
EH-TMCV : 被覆径約3mm以下の太径入出力配線を使用した場合でもネジ端子部の保護・指などの接触防止が可能。
【その他】
■入出力コントローラ ■ベースユニット(基本・増設・リモート子局共通)
EH-IOCH2 : 増設1段につき1台必要 EH-BS3A : 入出力・通信モジュール3枚実装可能
EH-BS5A : 入出力・通信モジュール5枚実装可能
EH-BS6A : 入出力・通信モジュール6枚実装可能
■増設ベース接続用ケーブル
EH-BS8A : 入出力・通信モジュール8枚実装可能
EH-CB05A : 0.5m
EH-BS8R : 入出力・通信モジュール8枚実装可能、二重化電源2台実装可
EH-CB10A : 1m
EH-BS11A : 入出力モジュール11枚実装可能(通信モジュールはスロット0~7のみ実装可能)
EH-CB20A : 2m
※ ■ダミーモジュール
■バッテリ
EH-DUM : 未使用スロット保護用
HX-BAT : カレンダ時計データ保持用
※カレンダ時計データ保持のためにのみバッテリが必要です。
NTPサーバと時刻同期を図る場合、ならびにユーザプログラム・停電保持属性データメモリ保持にはバッテリを必要としません。
本書に掲載されている会社名や製品名は,一般に各社の商標または登録商標です。
なお、本文および図表中では、「 」、「®」は明記しておりません。
- 11 -
Page13
スライド 12
■ HX-CP1S08/CP1S08M/CP1H16/CP1H16M、HXC-CP1H16
(単位 : mm)
ベース型式 EH-BS11A EH-BS8A EH-BS6A EH-BS5A EH-BS3A EH-BS8R
I/Oモジュールスロット数 11 8 6 5 3 8
L1 447 357 297 267 207 417
L2 462.5 372.5 312.5 282.5 222.5 432.5
■ HX-CP1S08-0/CP1S08M-0/CP1H16-0/CP1H16M-0、HXC-CP1H16-0
(単位 : mm)
(注) 適合規格の詳細につきましては弊社にお問い合わせください。
項目 仕様
使用周囲温度 0~55 C (※0~45 C)
保存周囲温度 -10~75 C
使用周囲湿度 5~95 % RH(結露しないこと)
保存周囲湿度 5~95 % RH(結露しないこと)
耐振動 IEC60068-2-6準拠
耐衝撃 IEC60068-2-27準拠
汚損度(汚染度) 汚損度2以下(JIS B 3502、IEC 61131-2準拠)
使用雰囲気 腐食性ガスがないこと
使用高度/気圧 標高2,000 m以下(輸送時の気圧は70 kPa以上)
構造 盤内蔵型 IP20
冷却 自然空冷
※ HX-CP1S08, HX-CP1H16, HX-CP1S08M, HX-CP1H16M, HXC-CP1H16, EH-YR16をUL認証品として使用する場合のみ。
モデル・型式 スタンダードモデル:HX-CP1S08 高機能モデル:HX-CP1H16 スタンドアロンキット スタンダードモデル:HX-CP1S08-0 スタンドアロンキット 高機能モデル:HX-CP1H16-0
モーションモデル:HX-CP1S08M CNCモーションモデル:HX-CP1H16M スタンドアロンキット モーションモデル:HX-CP1S08M-0 スタンドアロンキット CNCモーションモデル:HX-CP1H16M-0
項目 ハイブリッドモデル:HXC-CP1H16 スタンドアロンキット ハイブリッドモデル:HXC-CP1H16-0
外形寸法 45 mm(W)×100 mm(D)×115 mm(H) 48 mm(W)×103 mm(D)×137 mm(H)
質量 190g 240g 260g 300g
消費電流 DC5V 1,000mA DC5V 1,200mA DC24V 400mA
- 12 -
Page14
スライド 13
■製品一覧 ※ご採用にあたりましては、使用可能ユニット、制約事項などを製品のマニュアルにて必ずご確認ください。
基本 増設 スレーブ
品 名 型式 仕 様 備考
※1 ※2 ※3
HX-CP1S08 スタンダードモデル、プログラム容量 8MB ○ ー ー
HX-CP1H16 高機能モデル、プログラム容量 16MB ○ ー ー
HX-CP1S08M モーションモデル、プログラム容量 8MB ○ ー ー
HX-CP1H16M CNCモーションモデル、プログラム容量 16MB ○ ー ー
HXC-CP1H16 ハイブリッドモデル、プログラム容量 16MB、C言語プログラム32MB ○ ー ー
CPUモジュール
HX-CP1S08-0 HXスタンドアロンキット スタンダードモデル ー ー ー
HX-CP1H16-0 HXスタンドアロンキット 高機能モデル ー ー ー
HX-CP1S08M-0 HXスタンドアロンキット モーションモデル ー ー ー
HX-CP1H16M-0 HXスタンドアロンキット CNCモーションモデル ー ー ー
HXC-CP1H16-0 HXスタンドアロンキット ハイブリッドモデル ー ー ー
サブCPUモジュール HXC-SCP 仮想コントローラディスク容量 1.9 GB、C/C++/Python言語 ○ ー ー
EH-PSA 入力AC100~240V、出力DC5V 3.8A、 DC24V 0.4A ○ ○ ○
電源モジュール EH-PSD 入力DC21.6~26.4V、出力DC5V 3.8A ○ ○ ○
EH-PSR 入力AC100~240V、出力DC5V 5.6A、電源二重化対応 ○ ○ ○
EH-BS3A 入出力・通信モジュール3枚実装可能 ○ ○ ○
EH-BS5A 入出力・通信モジュール5枚実装可能 ○ ○ ○
EH-BS6A 入出力・通信モジュール6枚実装可能 ○ ○ ○
ベースユニット
EH-BS8A 入出力・通信モジュール8枚実装可能 ○ ○ ○
EH-BS8R 入出力・通信モジュール8枚実装可能、二重化電源2台実装可 ○ ○ ○
EH-BS11A 入出力モジュール11枚実装可能(通信モジュールはスロット0~7のみ実装可能) ○ ○ ○
入出力コントローラ EH-IOCH2 入出力コントロールモジュール(1台/1増設) ー ○ ー ※4
EH-XD8 DC24V入力 8点、着脱端子台、応答時間5ms ○ ○ ○
EH-XD16 DC24V入力 16点、着脱端子台、応答時間5ms ○ ○ ○
EH-XDL16 DC24V入力 16点、着脱端子台、応答時間16ms ○ ○ ○
EH-XDS16 DC24V入力 16点、着脱端子台、応答時間1ms ○ ○ ○
EH-XDA16 DC48V入力 16点、着脱端子台、応答時間5ms ○ ○ ○
AC100~120V入力 16点、着脱端子台、応答時間15ms (OFF→ON)、
EH-XA16 ○ ○ ○
25ms (ON→OFF)
AC200~240V入力 16点、着脱端子台、応答時間15ms (OFF→ON)、
EH-XAH16 ○ ○ ○
25ms (ON→OFF)
EH-XD32 DC24V入力 32点、40pinコネクタ、応答時間5ms ○ ○ ○
EH-XD32E DC24V入力 32点、バネクランプ式端子台、応答時間1ms ○ ○ ○
デジタル入力モジュール
EH-XDL32E DC24V入力 32点、バネクランプ式端子台、応答時間16ms ○ ○ ○
EH-XD32H DC24V入力 32点(シンク)、EM/H-200互換コネクタ、応答時間4ms ○ ○ ○
EH-XDL32 DC24V入力 32点、40pinコネクタ、応答時間16ms ○ ○ ○
EH-XDS32 DC24V入力 32点、40pinコネクタ、応答時間1ms ○ ○ ○
EH-XDB32 DC12V入力 32点、40pinコネクタ、応答時間5ms ○ ○ ○
EH-XDBL32 DC12V入力 32点、40pinコネクタ、応答時間16ms ○ ○ ○
EH-XD64 DC24V入力 64点、40pinコネクタ×2、応答時間1ms ○ ○ ○
EH-XDL64 DC24V入力 64点、40pinコネクタ×2、応答時間16ms ○ ○ ○
EH-XDB64 DC12V入力 64点、40pinコネクタ×2、応答時間1ms ○ ○ ○
EH-XDBL64 DC12V入力 64点、40pinコネクタ×2、応答時間16ms ○ ○ ○
EH-MTT32 DC4~27Vシンク入力16点、DC4~27Vシンク出力16点 ○ ○ ○
EH-MTT32A DC3~15Vシンク入力16点、DC4~15Vシンク出力16点 ○ ○ ○
TTL入出力モジュール
EH-XTT32 DC3~15Vシンク入力32点、入力遅延時間1ms以下 ○ ○ ○
EH-YTT32 DC4~15Vシンク出力32点、出力遅延時間1ms以下 ○ ○ ○
※1: ○は基本ベースに実装可能を意味します。
※2: ○は増設ベースに実装可能を意味します。
※3: ○はEtherCAT、DeviceNet、PROFIBUS-DPスレーブベースに実装可能を意味します。
※4: 各増設ベースの電源モジュール右隣(基本ベースのCPUモジュール実装位置)に実装します。(実装位置固定)
◎ご注意◎
本システムはベース1台あたり最大11台のモジュールを実装可能ですが、実装可能なモジュール構成は電源モジュールの最大出力電流に依存します。
電源モジュールの最大出力電流の許容範囲内でご使用ください。各モジュールの消費電流は必ずマニュアルにてご確認ください。
- 13 -
Page15
スライド 14
※ご採用にあたりましては、使用可能ユニット、制約事項などを製品のマニュアルにて必ずご確認ください。
基本 増設 スレーブ
品 名 型式 仕 様 備考
*1 *2 *3
EH-YT8 DC12/24V Tr出力 8点、着脱端子台、シンクタイプ ○ ○ ○
EH-YT16 DC12/24V Tr出力 16点、着脱端子台、シンクタイプ ○ ○ ○
EH-YTP8 DC12/24V Tr出力 8点、着脱端子台、ソースタイプ ○ ○ ○
EH-YTP16 DC12/24V Tr出力 16点、着脱端子台、ソースタイプ ○ ○ ○
EH-YTP16S DC12/24V Tr出力 16点、着脱端子台、ソースタイプ(短絡保護付き) ○ ○ ○
EH-YR12 AC100~240V/DC24V Ry出力 12点、着脱端子台 ○ ○ ○
EH-YR16 AC100~240V/DC24V Ry出力 16点、着脱端子台 ○ ○ ○
EH-YR16D AC100~240V/DC24V Ry出力 16点(2コモン)、着脱端子台 ○ ○ ○
EH-YR8B AC100~240V/DC24V Ry出力 8点(独立)、着脱端子台 ○ ○ ○
デジタル出力モジュール EH-YS16 AC100/240V トライアック出力 16点、着脱端子台 ○ ○ ○
EH-YT32E DC12/24V Tr出力 32点、バネクランプ式端子台、シンクタイプ ○ ○ ○
EH-YTP32E DC12/24V Tr出力 32点、バネクランプ式端子台、ソースタイプ(短絡保護付き) ○ ○ ○
EH-YT32 DC12/24V Tr出力 32点、40pinコネクタ、シンクタイプ ○ ○ ○
EH-YTP32 DC12/24V Tr出力 32点、40pinコネクタ、ソースタイプ(短絡保護付き) ○ ○ ○
EH-YT32H DC5/12/24V Tr出力 32点、EM/H-200互換コネクタ、シンクタイプ ○ ○ ○
EH-YT64 DC12/24V Tr出力 64点、40pinコネクタ、シンクタイプ ○ ○ ○
EH-YTP64 DC12/24V Tr出力 64点、40pinコネクタ×2、ソースタイプ(短絡保護付き) ○ ○ ○
EH-YTA16 DC24/48V Tr出力 16点、着脱端子台、シンクタイプ ○ ○ ○
EH-YTPA16 DC24/48V Tr出力 16点、着脱端子台、ソースタイプ ○ ○ ○
EH-AX44 12bit電流/電圧入力、4~20mA 4ch.、DC0~10V 4ch. ○ ○ ○
EH-AX8V 12bit電圧入力、0~+10V 8ch. ○ ○ ○
EH-AX8H 12bit電圧入力、-10~+10V 8ch. ○ ○ ○
EH-AX8I 12bit電流入力、4~20mA 8ch. ○ ○ ○
EH-AX8IO 12bit電流入力、0~22mA 8ch. ○ ○ ○
EH-AXH8M 14bit電流/電圧入力、0~10V/-10~10V/0~22mA/4~20mA 8ch. ○ ○ ○
12/16bit電流/電圧入力、ch.間絶縁、0~10V/-10~10V/0~22mA/
EH-AXG5M ○ ○ ○
4~20mA 5ch.
EH-AY22 12bit電流/電圧出力、4~20mA 2ch.、DC0~10V 2ch. ○ ○ ○
アナログ入出力モジュール EH-AY2H 12bit電圧出力、-10~+10V 2ch. ○ ○ ○
EH-AY4V 12bit電圧出力、0~+10V 4ch. ○ ○ ○
EH-AY4H 12bit電圧出力、-10~+10V 4ch. ○ ○ ○
EH-AY4I 12bit電流出力、4~20mA 4ch. ○ ○ ○
EH-TC8 15bit熱電対(K,E,J,T,B,R,S,N)入力8ch. ○ ○ ○
EH-PT4 15bit測温抵抗体(Pt100/1000)入力4ch. ○ ○ ○
EH-RTD8 15bit測温抵抗体(Pt100/1000)入力6/8ch. ○ ○ ○
EH-AYH8M 14bit電流/電圧出力、0~10V/-10~10V/0~22mA/4~20mA 8ch. ○ ○ ○
12/16bit電流/電圧出力、ch.間絶縁、0~10V/-10~10V/0~22mA/
EH-AYG4M ○ ○ ○
4~20mA 4ch.
EH-CU 2ch.カウンタ入力、最大100kHz ○ ○ ○
カウンタモジュール
EH-CUE 1ch.カウンタ入力、最大100kHz ○ ○ ○
EH-LNK 同軸CPUリンク、リンクエリア1Kワード ○ ー ー ※5
EH-OLNK 光CPUリンク、リンクエリア1Kワード、CSI-200/220・SGI-185/230 ○ ー ー ※5
通信モジュール
EH-OLNKG 光CPUリンク、リンクエリア1Kワード、SGI-50/125 ○ ー ー ※5
EH-OLNKE 光CPUリンク、リンクエリア1Kワード、SGI-62.5/125 ○ ー ー ※5
EH-IOCA EtherCATスレーブコントローラ ー ー ○ ※4
HX-ECTS EtherCATスレーブモジュール ○ ー ー ※7
EH-FLN3 FL-netインタフェースモジュール、10M/100Mbps ○ ー ー ※6
フィールド
ネットワーク EH-RMD2 DeviceNet親局モジュール ○ ー ー ※5
モジュール
EH-IOCD2 DeviceNet子局コントローラ ー ー ○ ※4
EH-RMP2 PROFIBUS-DP親局モジュール ○ ー ー ※5
EH-IOCP2 PROFIBUS-DP子局コントローラ ー ー ○ ※4
シリアル通信モジュール EH-SIO 2ポート (RS-232C/RS-422/RS-485選択) ○ ○ ○
※1: ○は基本ベースに実装可能を意味します。
※2: ○は増設ベースに実装可能を意味します。
※3: ○はEtherCAT、DeviceNet、PROFIBUS-DPスレーブベースに実装可能を意味します。
※4: 各増設ベースの電源モジュール右隣(基本ベースのCPUモジュール実装位置)に実装します。(実装位置固定)
※5: 最大8台まで使用可。実装可能スロットは基本ベースの0~7スロットのみ。
※6: 最大2台まで使用可。実装可能スロットは基本ベースの0~7スロットのみ。
※7 : 最大2台または最大8台まで使用可。(割付による)実装可能スロットは基本ベースの0~7スロットのみ。
◎ご注意◎
本システムはベース1台あたり最大11台のモジュールを実装可能ですが、実装可能なモジュール構成は電源モジュールの最大出力電流に依存します。
電源モジュールの最大出力電流の許容範囲内でご使用ください。各モジュールの消費電流は必ずマニュアルにてご確認ください。
- 14 -
Page16
スライド 15
※ご採用にあたりましては、使用可能ユニット、制約事項などを製品のマニュアルにて必ずご確認ください。
基本 増設 スレーブ
品 名 型式 仕 様 備考
*1 *2 *3
EH-CB05A 増設ケーブル 0.5m ー ー ー
増設ベース
EH-CB10A 増設ケーブル1m ー ー ー
接続用ケーブル
EH-CB20A 増設ケーブル2m ー ー ー
中継端子台 HPX7DS-40V6 32点/64点モジュール中継端子台(32点分) ー ー ー
EH-CBM01W 32点/64点モジュール間ケーブル(32点分) 1m、両端コネクタ付 ー ー ー
EH-CBM03W 32点/64点モジュール間ケーブル(32点分) 3m、両端コネクタ付 ー ー ー
EH-CBM05W 32点/64点モジュール間ケーブル(32点分) 5m、両端コネクタ付 ー ー ー
32点/64点モジュール EH-CBM10W 32点/64点モジュール間ケーブル(32点分) 10m、両端コネクタ付 ー ー ー
外部配線用ケーブル EH-CBM01 32点/64点モジュール間ケーブル(32点分) 1m、片側バラ線 ー ー ー
EH-CBM03 32点/64点モジュール間ケーブル(32点分) 3m、片側バラ線 ー ー ー
EH-CBM05 32点/64点モジュール間ケーブル(32点分) 5m、片側バラ線 ー ー ー
EH-CBM10 32点/64点モジュール間ケーブル(32点分) 10m、片側バラ線 ー ー ー
CBM-02 片端EH-XD32H/EH-YT32H用コネクタ付、長さ2m ー ー ー
32点モジュール
CBM-05 片端EH-XD32H/EH-YT32H用コネクタ付、長さ5m ー ー ー
接続用ケーブル
CBM-10 片端EH-XD32H/EH-YT32H用コネクタ付、長さ10m ー ー ー
EH-CUC01 EH-CU/EH-CUE用ケーブル(片端コネクタ/片端バラ線)1m ー ー ー
EH-CUC02 EH-CU/EH-CUE用ケーブル(片端コネクタ/片端バラ線)2m ー ー ー
カウンタモジュール用
EH-CUC03 EH-CU/EH-CUE用ケーブル(片端コネクタ/片端バラ線)3m ー ー ー
ケーブル
EH-CUC04 EH-CU/EH-CUE用ケーブル(片端コネクタ/片端バラ線)4m ー ー ー
EH-CUC05 EH-CU/EH-CUE用ケーブル(片端コネクタ/片端バラ線)5m ー ー ー
EH-DUM I/Oモジュール実装スロット用ダミーモジュール ○ ○ ○
その他
EH-TMCV ハーフサイズ端子台カバー ○ ○ ○
バッテリ HX-BAT HX用リチウム電池 ー ー ー ※8
統合開発環境 HX-CDS 統合開発環境 HX-CODESYS(IEC61131-3準拠プログラム言語) ー ー ー ※9
エンジニアリングツール HX-STD HXハイブリッドモデル用HX-Studio(HX-CODESYS同梱) ー ー ー ※9
※8: カレンダ時計データ保持のためにのみバッテリが必要です。
NTPサーバとのカレンダ時計同期を計る場合、ならびにユーザプログラム・停電保持属性データメモリ保持にはバッテリを必要としません。
※9: PCとCPUモジュールの接続用ケーブル(A-mini BタイプUSBケーブルもしくはLANケーブル)はお客さまにてご用意ください。
ただし、HX-StudioはLAN接続専用です。
■本製品の輸出管理に関して
本製品を輸出される場合には、外国為替および外国貿易法の規制ならびに米国の輸出管理規制など外国の輸出関連法規をご確認のうえ、
必要な手続きをお取りください。
ご採用に際してのご注意
この資料は、製品の代表的な特長機能を説明した資料です。使用上の制約事項、ユニットの組み合わせによる制約事項などがすべて記載されているわけではあ
りません。ご採用にあたりましては、必ず製品のマニュアルをお読みいただきますようお願い申し上げます。
当社の責に帰すことができない事由から生じた損害、当社製品の故障に起因するお客さまでの機械損失、逸失利益、当社の予見の有無を問わず特別の事情
から生じた損害、二次損害、事故補償、当社製品以外への損傷および、その他の業務に対する保証については、当社は責任を負いかねます。
【免責事項】
⚫ 無償保証期間の内外に問わず、弊社の責に帰すことができない事由から生じた損害、弊社製品の故障に起因するお客さまで機会損失、逸失利益、弊社の予見の有無を問わず
特別の事情から生じた損害、弊社製品に起因して発生した間接損害、二次損害、事故補償、弊社製品以外への損傷およびお客さまでの交換作業、現地機械設備の再調整、
立ち上げ試運転その他の業務に対する補償について、弊社はいかなる場合も責任を負いません。
⚫ お客さまがプログラム可能な製品については、お客さまご自身にて動作確認いただくこととします。お客さまにてプログラムされたプログラムの動作およびそれにより発生した損害について、
弊社はいかなる場合も責任を負いません。
⚫ 弊社製品をお客さまのシステムにてご使用される場合、法令や規格基準への適合あるいは特許等第三者権利侵害については、お客さまご自身においてご確認ください。これにより
発生した問題に関して、弊社は関知いたしません。
安全に関するご注意
⚫ 安全のため、ご使用の際は、「 取扱説明書」、「 マニュアル」をよくお読みのうえ、正しくお使いください。
⚫ ご使用環境については、カタログ、取扱説明書、マニュアルに記載されている範囲内とします。高温、多湿、じんあい、腐食性ガス、振動、衝撃などの多い環境で使用しないでくださ
い。火災、故障、感電、誤動作の原因となることがあります。
⚫ 安全のため、製品の取り付け、配線も取扱説明書、マニュアルに従ってください。接続は、電気工事・電気配線などの専門技術を有する人が行ってください。異物の混入にもご注意
ください。
⚫ 本カタログに記載された製品は、使用用途・場所などを限定するもの、定期点検を必要とするものがあります。お買い上げの販売店または当社にご確認ください。
⚫ 本製品は、厳重な品質管理のもとに製造しておりますが、製品が故障することにより人命にかかわる重要な設備および重大な損失の発生が予測される設備へのご使用に際しては、
重大事故にならないように安全装置の設置を行ってください。
- 15 -
Page17
スライド 16
弊社HPにて シリーズ・ シリーズ の適用事例やサンプルプロジェクトなどを公開しています。
https://www.hitachi-ies.co.jp/products/hx/labo/index.html
技術的なお問い合わせ先: URL: https://www.hitachi-ies.co.jp/products/hx
■ 電話フリーダイヤル ・・・・ 0120-46-3444
携帯電話の方は(0254)46-3444をご利用ください。
■ Eメールアドレス ・・・・・・ fa_plc@hitachi-ies.co.jp
■ ご利用時間帯 ・・・・・・ 月~金 9:00~12:00/13:00~17:00
(ただし、祝日、当社休日は除く) 日立産機 HX
●このカタログに掲載した内容は、予告なく変更することがありますのでご了承ください。
HX-004 2024.4