




防塵防滴スカラロボットに800/1000/1200㎜アームが追加された製品カタログです。
・保護等級:IP65
・標準サイクルタイム:0.3秒
・最大可搬:47㎏
・最大アーム長:1200㎜
カタログ内にはアプリ事例が見られるQRコードもございます!!
このカタログについて
| ドキュメント名 | IXA 大型スカラロボット(アーム長 800/1000/1200㎜)に防塵防滴仕様がリリース!! |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 9.1Mb |
| 取り扱い企業 | 株式会社アイエイアイ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
表紙
カタログ番号 CJ0400-1A( 2022年7月)
スカラロボット防塵防滴仕様 IXA-4NSW/4NHW
安心とは24時間対応のことです エイト FAQ
お困りの方は
こちら!
本 社 〒424-0103 静岡県静岡市清水区尾羽577-1 TEL 054-364-5105 FAX 054-364-2589
東 京 営 業 所 〒105-0014 東京都港区芝3-24-7 芝エクセージビルディング4F TEL 03-5419-1601 FAX 03-3455-5707
大 阪 営 業 所 〒530-0005 大阪府大阪市北区中之島6-2-40 中之島インテス14F TEL 06-6479-0331 FAX 06-6479-0236
名 古 屋 支 店
名古屋営業所 〒460-0008 愛知県名古屋市中区栄5-28-12 名古屋若宮ビル8F TEL 052-269-2931 FAX 052-269-2933
小 牧 営 業 所 〒485-0029 愛知県小牧市中央1-271 大垣共立銀行 小牧支店ビル6F TEL 0568-73-5209 FAX 0568-73-5219
四日市営業所 〒510-0086 三重県四日市市諏訪栄町1-12 朝日生命四日市ビル6F TEL 059-356-2246 FAX 059-356-2248
豊 田 支 店
新 豊田営業所 〒471-0034 愛知県豊田市小坂本町1-5-3 朝日生命新豊田ビル4F TEL 0565-36-5115 FAX 0565-36-5116
安 城 営 業 所 〒446-0056 愛知県安城市三河安城町1-9-2 第二東祥ビル3F TEL 0566-71-1888 FAX 0566-71-1877
盛 岡 営 業 所 〒020-0062 岩手県盛岡市長田町6-7 クリエ21ビル7F TEL 019-623-9700 FAX 019-623-9701
秋 田 出 張 所 〒018-0402 秋田県にかほ市平沢字行ヒ森2-4 TEL 0184-37-3011 FAX 0184-37-3012
仙 台 営 業 所 〒980-0011 宮城県仙台市青葉区上杉1-6-6 イースタンビル7F TEL 022-723-2031 FAX 022-723-2032
新 潟 営 業 所 〒940-0082 新潟県長岡市千歳3-5-17 センザイビル2F TEL 0258-31-8320 FAX 0258-31-8321
宇都宮営業所 〒321-0953 栃木県宇都宮市東宿郷5-1-16 ルーセントビル3F TEL 028-614-3651 FAX 028-614-3653
熊 谷 営 業 所 〒360-0847 埼玉県熊谷市籠原南1-312 あかりビル5F TEL 048-530-6555 FAX 048-530-6556
茨 城 営 業 所 〒300-1207 茨城県牛久市ひたち野東5-3-2 ひたち野うしく池田ビル2F TEL 029-830-8312 FAX 029-830-8313
多 摩 営 業 所 〒190-0023 東京都立川市柴崎町3-14-2 BOSENビル2F TEL 042-522-9881 FAX 042-522-9882
甲 府 営 業 所 〒400-0031 山梨県甲府市丸の内2-12-1 ミサトビル3F TEL 055-230-2626 FAX 055-230-2636
厚 木 営 業 所 〒243-0014 神奈川県厚木市旭町1-10-6 シャンロック石井ビル3F TEL 046-226-7131 FAX 046-226-7133
長 野 営 業 所 〒390-0852 長野県松本市島立943 ハーモネートビル401 TEL 0263-40-3710 FAX 0263-40-3715
静 岡 営 業 所 〒424-0103 静岡県静岡市清水区尾羽577-1 TEL 054-364-6293 FAX 054-364-2589
浜 松 営 業 所 〒430-0936 静岡県浜松市中区大工町125 シャンソンビル浜松7F TEL 053-459-1780 FAX 053-458-1318
金 沢 営 業 所 〒920-0024 石川県金沢市西念3-1-32 西清ビルA棟2F TEL 076-234-3116 FAX 076-234-3107
滋 賀 営 業 所 〒524-0033 滋賀県守山市浮気町300-21 第2小島ビル2F TEL 077-514-2777 FAX 077-514-2778
京 都 営 業 所 〒612-8418 京都府京都市伏見区竹田向代町12 TEL 075-693-8211 FAX 075-693-8233
兵 庫 営 業 所 〒673-0898 兵庫県明石市樽屋町8-34 第5池内ビル8F TEL 078-913-6333 FAX 078-913-6339
岡 山 営 業 所 〒700-0973 岡山県岡山市北区下中野311-114 OMOTO-ROOT BLD.101 TEL 086-805-2611 FAX 086-244-6767
広 島 営 業 所 〒730-0051 広島県広島市中区大手町3-1-9 広島鯉城通りビル5F TEL 082-544-1750 FAX 082-544-1751
徳 島 営 業 所 〒770-0905 徳島県徳島市東大工町1-9-1 徳島ファーストビル5F-B TEL 088-624-8061 FAX 088-624-8062
松 山 営 業 所 〒790-0905 愛媛県松山市樽味4-9-22 フォーレスト21 1F TEL 089-986-8562 FAX 089-986-8563
福 岡 営 業 所 〒812-0013 福岡県福岡市博多区博多駅東3-13-21 エフビルWING7F TEL 092-415-4466 FAX 092-415-4467
大 分 営 業 所 〒870-0823 大分県大分市東大道1-11-1 タンネンバウムⅢ 2F TEL 097-543-7745 FAX 097-543-7746
熊 本 営 業 所 〒862-0910 熊本県熊本市東区健軍本町1-1 拓洋ビル4F TEL 096-214-2800 FAX 096-214-2801
Head Office : 2690 W. 237th Street, Torrance, CA 90505, USA
Chicago Office : 110 East State Parkway, Schaumburg, IL 60173, USA
825 Phairojkijja Tower 7th Floor, Debaratana Rd.,
Bangna Nuea, Bangna, Bangkok 10260, Thailand
当カタログに記載されている内容は、製品改良のため予告なしに変更することがあります。
ロボシリンダ/ロボシリンダー/ROBOCYLINDER/エレシリンダ/エレシリンダー/ELECYLINDER/デジタルスピコン/ラジアルシリンダ/ラジアルシリンダー/RADIAL CYLINDER/
パワーコン/パワーコンスカラ/パルスプレスは株式会社アイエイアイの登録商標です。
Page2
特長
最大可搬質量 47㎏ シミュレーションソフト
最大アーム長 1,200㎜
スカラロボット防塵防滴仕様
保護等級 標準サイクルタイム
IP IXA-4NSW80□□
6 5 0.30秒
(要約)耐じん形 固形異物 水(要約)噴流(water jet)に
対して保護 動作 ▶2kg搬送
粉塵は完全に遮断され 条件 ▶水平移動300mm/上下移動25mm
本体内部に侵入しません。 いかなる方向から水の直接噴流を受けても 水平移動
上下
※IEC 60529 有害な影響は受けません。 ※JIS C 0920 移動
上下ジャバラ構造
(封止性確保/エアパージ不要)
アーム長 1,200㎜
最大可搬
部品洗浄の供給・取出し工程 47㎏
~ワーク搬送~
アプリ動画はこちらから➡
1
Page3
型式項目/製品ラインナップ
最大可搬質量 47㎏ シミュレーションソフト
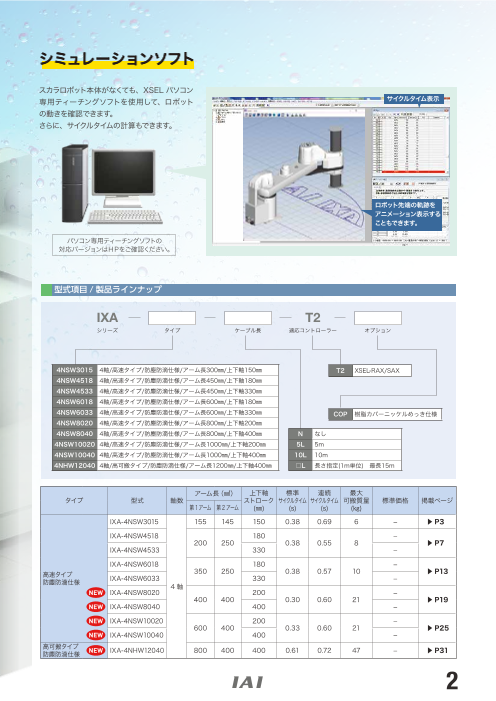
最大アーム長 1,200㎜ スカラロボット本体がなくても、XSEL パソコン
専用ティーチングソフトを使用して、ロボット サイクルタイム表示
スカラロボット防塵防滴仕様 の動きを確認できます。
さらに、サイクルタイムの計算もできます。
保護等級 標準サイクルタイム
IP IXA-4NSW80□□
6 5 0.30 ロボット先端の軌跡を
秒 アニメーション表示する
固形異物 水 こともできます。
(要約)耐じん形 (要約)噴流(water jet)に
対して保護 動作 ▶2kg搬送 パソコン専用ティーチングソフトの
粉塵は完全に遮断され 条件 ▶水平移動300mm/上下移動25mm 対応バージョンはHPをご確認ください。
本体内部に侵入しません。 いかなる方向から水の直接噴流を受けても 水平移動
上下
※IEC 60529 有害な影響は受けません。 ※JIS C 0920 移動
型式項目 /製品ラインナップ
IXA T2
シリーズ タイプ ケーブル長 適応コントローラー オプション
4NSW3015 4軸/高速タイプ/防塵防滴仕様/アーム長300㎜/上下軸150㎜ T2 XSEL-RAX/SAX
4NSW4518 4軸/高速タイプ/防塵防滴仕様/アーム長450㎜/上下軸180㎜
上下ジャバラ構造 4NSW4533 4軸/高速タイプ/防塵防滴仕様/アーム長450㎜/上下軸330㎜
4NSW6018 4軸/高速タイプ/防塵防滴仕様/アーム長600㎜/上下軸180㎜
(封止性確保/エアパージ不要) 4NSW6033 4軸/高速タイプ/防塵防滴仕様/アーム長600㎜/上下軸330㎜ COP 樹脂カバーニッケルめっき仕様
4NSW8020 4軸/高速タイプ/防塵防滴仕様/アーム長800㎜/上下軸200㎜
アーム長 4NSW8040 4軸/高速タイプ/防塵防滴仕様/アーム長800㎜/上下軸400㎜ N なし
1,200㎜ 4NSW10020 4軸/高速タイプ/防塵防滴仕様/アーム長1000㎜/上下軸200㎜ 5L 5m
4NSW10040 4軸/高速タイプ/防塵防滴仕様/アーム長1000㎜/上下軸400㎜ 10L 10m
4NHW12040 4軸/高可搬タイプ/防塵防滴仕様/アーム長1200㎜/上下軸400㎜ □L 長さ指定(1m単位) 最長15m
アーム長(㎟) 上下軸 標準 連続 最大
タイプ 型式 軸数 ストローク サイクルタイム サイクルタイム 可搬質量 標準価格 掲載ページ
第 1アーム 第 2 アーム (㎜) (s) (s) (㎏)
IXA-4NSW3015 155 145 150 0.38 0.69 6 − ▶P3
IXA-4NSW4518 180 −
200 250 0.38 0.55 8 ▶P7
IXA-4NSW4533 330 −
IXA-4NSW6018 180 −
高速タイプ 350 250 0.38 0.57 10 ▶P13
最大可搬 防塵防滴仕様 IXA-4NSW6033 330 −
4 軸
NEW IXA-4NSW8020 200 −
部品洗浄の供給・取出し工程 47㎏ 400 400 0.30 0.60 21 ▶P19
NEW IXA-4NSW8040 400 −
~ワーク搬送~ NEW IXA-4NSW10020 200 −
600 400 0.33 0.60 21 ▶P25
アプリ動画はこちらから➡ NEW IXA-4NSW10040 400 −
高可搬タイプ
防塵防滴仕様 NEW IXA-4NHW12040 800 400 400 0.61 0.72 47 − ▶P31
2
Page4
製品仕様、IXA-4NSW3015
IXA スカラロボット
IXA-4NSW3015 防塵 バッテリー アーム長
・
防滴 レスアブソ 300mm
■ 型式項目
IXA - 4 NSW 30 1 5 - - T 2
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー
4 4軸 NSW 高速タイプ 防塵・防滴仕様 30 300mm 15 150mm N 無し T2 XSEL-RAX/SAX
5L 5m
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、3 5 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NSW3015 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
が出る場合があります。連続動作を行う際は加減速値を下げるか、
■ 別売オプション価格表(標準価格) 選定上の デューティー比(目安)を参考にして加減速後に停止時間を設けてく
注意 ださい。
名称 型式 参照頁 標準価格 (3)ジャバラに直接噴流をかけないでください。ジャバラ給排気用継手に
ユーザーケーブル CB-IXA-USR□□□-CS 41 - はφ 16 エアチューブを接続し、先端を清浄な空間に開放してください。
ユーザー配線用メタルキャップ IXA-MC-1 40 - (4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。動
フランジ IX-FL-1 40 - 作可能条件は「加減速度設定の目安」をご確認ください。
(注) 別途ご注文ください。 (5)ケーブルジョイント部は保護構造ではないため、水のかからない清浄
■ なところに設置してください。
ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L (5m) -
10L (10m) -
1L (1m) ~ 4L (4m) -
6L (6m) ~ 9L (9m) -
11L (11m) -
長さ指定 1 2L (12m) -
13L (13m) -
14L( 14m) -
1 5L (15m) -
(注) 下記ケーブルの合計金額となります。
モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
3 IXA-4NSW3015
Page5
お問合わせは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容 内容
4軸仕様 項目 4軸仕様
最大可搬質量(kg()注1) 6 水平面内 ±0.01mm
合成最高速度(mm/s) 5126 位置繰返し精度
(注4) 上下軸 ±0.01mm
速度 第1アーム(度/s) 690 回転軸 ±0.005度
(注2) 各軸最高速度 第2アーム(度/s) 690 ユーザー配線 10心(9心+シールド) AWG24(定格30V/MAX1A)
上下軸(mm/s) 1500 ユーザー配管 外径φ4 内径φ2.5 エアチューブ3本
回転軸(度/s) 1600 (最高使用圧力0.6MPa)
押付け(N)(注3) 上限 98 ブレーキ解除スイッチ(注5) 上下軸落下防止用ブレーキ解除スイッチ
下限 23 許容トルク 4.5N・m
アーム長(mm) 300 先端軸 許容負荷モーメント 7.1N・m
各軸アーム長(mm) 第1アーム 155 主要部材質 37ペ ージをご確認ください
第2アーム 145 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±121 保護等級 IP65(ジャバラ部は除く)
各軸動作範囲 第2アーム(度) ±125 エアパージ圧力(注6) 35kPa
上下軸(mm) 150 耐振動・耐衝撃 衝撃・振動が加わらないこと
回転軸(度) ±360 騒音(注7) 80dB以下
海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 600
モーター容量 第2アーム 400
上下軸 200
回転軸 100
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 16384 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.38秒 4軸仕様 0.12 kg・m2
連続サイクルタイム 0.69秒
スカラロボットの先端軸(回転軸)中心換算の慣性モーメント許容値です。
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした 先端軸中心からツール重心までのオフセット量は、以下の数値以内としてください。
場合の所要時間を表します。 ツール重心位置が先端軸中心位置を離れた場合は、速度・加速度を適宜落とす必要があ
2kg搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) ります。負荷や動作条件によって、張出し長は制限されます。
【標準サイクルタイム】
最速動作の場合の所要時間です。一般に高速性能の目安となります。最速動作での連続
動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
先端軸
上下移動
負荷
重心
水平方向
水平方向 上下方向
120mm以下 100mm以下
■ 押付け力と電流制限値の相関図(参考値)
上下軸の先端部の押付け力です。(注3)
140
128
120
100
98
80
60 49
40
20 23
0
0 20 40 60 80
押付け電流制限値(%)
IXA-4NSW3015 4
押付け力(N)
上下方向
Page6
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、デューティー比設定の目安グラフを参考に停止時間を設
けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの連続運転目安範囲の設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも可搬質量が異なると、動作時間も異なりますのでご注意ください。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、デューティー比設定の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合はできるだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、可搬質量は許容値以下としてください。
(7) 可搬質量は回転軸中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NSW30 PTP加減速度設定の目安 NSW30 PTP動作デューティー比設定の目安
100% 100%
90% 最大設定範囲 90%
80% 80%
70% 70%
60% 60%
50% 50%
40% 40%
75%
30% 30%
20% 連続運転目安範囲 20%
10% 10%
0%
0 1 2 3 4 5 6 0%
100% 80% 60% 40% 20% 0%
搬送負荷質量(kg)
デューティー比(%)
0 0.12
負荷慣性モーメント(kg・m2)
■ CP動作
水平 上下 ■ CP動作 速度・加減速度制限
NSW30 上下軸(Z軸)動作なし水平移動動作
NSW30 CP加減速度設定の目安 NSW30 CP加減速度設定の目安 2400
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
2.5 2.5 2000
1600 1600
最大設定範囲 1400
2 最大速度1500mm/s 1600
2
最大設定範囲 2.0G 2.0G
1200
1.5 最大速度1600mm/s 1.5 1.5G
800
1
1 400
連続運転目安範囲 最大速度650mm/s
0.5 連続運転目安範囲 0
最大速度1350mm/s 0 1 2 3 4 5 6
0.5
0.3 0.2 搬送負荷質量(kg)
0.3
0 0.1
0 1 2 3 4 5 6 0
搬送負荷質量(kg) 0 1 2 3 4 5 6 NSW30 上下軸(Z軸)のみの動作
搬送負荷質量(kg) 2400
0 0.12
負荷慣性モーメント(kg・m2) 0 0.12 2000
負荷慣性モーメント(kg・m2) 1500 1500 1400
1600
1200 2.0G 2.0G
NSW30 CP動作デューティー比設定の目安 NSW30 CP動作デューティー比設定の目安 1.5G
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作 800
2.5 2.5
400
2
2 2 2 0
0 1 2 3 4 5 6
.0kg 搬送負荷質量(kg)
6
1.5 .0kg, 1.5
, 4 1.5 1.5
2.0kg
1 1
1 1 1
0.5 0.5 0.5
0.5 0.5
0.3 .0kg
0.2 6
0 0.1
0
100% 80% 60% 40% 20% 0% 100% 80% 60% 40% 20% 0%
デューティー比(%) デューティー比(%)
5 IXA-4NSW3015
加減速度(G) 加減速度(G) 加減速度(%)
加減速度(G)
加減速度(G) 加減速度(%)
4.0kg,6.0kg
2.0kg
2.
4 0
. k
0 gkg
CP速度(mm/s) CP速度(mm/s)
Page7
お問合わせは
0800-888-0088 IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
■ IXA-4NSW3015
(注) ケーブル接続に関しては3 6 ページ(注8)をご参照ください。 ST:ストローク
M.E.:メカニカルエンド
ユーザー配線用 W 3-M4深さ8 基準面 S.E.:ストロークエンド
LF10コネクター
(9極、レセプタクル)
配線:24AWG、
10心(9心+シールド)
乾燥空気排気口
M5タップ Y Y
詳細図 K
黒 145 92.5 K ベース取付け穴詳細
黄 15 155 φ18
3-φ4エアチューブ 白 184.5 φ9
ワンタッチ継手 272.5
詳細図 W (587.1)
ユーザーパネル詳細 82 300 (205.1)
145 155
断面図 Y-Y
(4箇所)
2-M4深さ8
R軸アブソリセット用
60 60
2-M4深さ8
2-M4深さ8
(反対側も同様)
M.E.
原点 P ブレーキ解除スイッチ
ジャバラ内圧力調整用
φ16エアチューブワンタッチ継手
X 乾燥空気吸気用
S.E. φ8スピードコントローラー
M.E.
基準面 (200) モーター・エンコーダー M4深さ10(アース接続用)
92.5 172 (33.1)配線空間 ケーブル接続
(第1アーム) モーター・エンコーダー
222.5 着座面 ケーブル接続
φ70
Q (第2アーム・上下軸・回転軸)
184.5 10 + 0 . 0 1 50 深さ6 ユーザー配線用ケーブル
h7 (ベース着座面より) 3-φ4エアチューブ 先端:D-subコネクター
20 R) ワンタッチ継手 (15極、プラグ、固定具M2.6)
φ ( 配線:24AWG、10心(9心+シールド)
白 黒
Z Z 断面図 Z-Z 黄
スプライン封止キャップ 45 φ10 H7リーマー深さ10 詳細図 Q 詳細図 X
ベース長穴詳細 背面パネル詳細
詳細図 P
R138.8 R138.8
R300 R 300
R15
R155 5
R145 R145
135 2° 62 125
58. .1°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 4軸仕様 48.0kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
最大接続 制御方法
名称 外観 可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページ
DV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-RAX4/SAX4(IXA用) 4 三相AC200V - - ● ● ● ● ● - - - ● ● - - - 36666 - 45
(注) DV、CCなどのネットワーク略称記号については、 総合カタログ2022・8-15 ページをご確認ください。
IXA-4NSW3015 6
381 8
58
1010
715
19 376.5 12.5 154
250 135
5 150ST 5 50
121° 281
15 140 85
90
140 15
167.5 (29.4)
474 176
12 699 (15.6)
121°
R145 15
125°
49 51.5
21°1
121
°
5
R1
4
°
125
Page8
IXA-4NSW4518、IXA-4NSW4533
IXA スカラロボット
IXA-4NSW4518 防塵
・ バッテリー アーム長
レスアブソ 450
IXA-4NSW4533 防滴 mm
■ 型式項目
I XA - 4 NSW 45 - - T 2
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー
4 4軸 NSW 高速タイプ 防塵・防滴仕様 45 450mm 18 180mm N 無し T2 XSEL-RAX/SAX
33 330mm 5L 5m
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、 35 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NSW4518 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
IXA-4NSW4533 - が出る場合があります。連続動作を行う際は加減速値を下げるか、
選定上の デューティー比(目安)を参考にして加減速後に停止時間を設けてく
■ 別売オプション価格表(標準価格) 注意 ださい。
(3)ジャバラに直接噴流をかけないでください。ジャバラ給排気用継手に
名称 型式 参照頁 標準価格 はφ 16 エアチューブを接続し、先端を清浄な空間に開放してください。
ユーザーケーブル CB-IXA-USR□□□-CS 4 1 - (4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。動
ユーザー配線用メタルキャップ IXA-MC-1 4 0 - 作可能条件は「加減速度設定の目安」をご確認ください。
フランジ IX-FL-1 40 - (5)ケーブルジョイント部は保護構造ではないため、水のかからない清浄
(注) 別途ご注文ください。 なところに設置してください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L (5m) -
10L (10m) -
1L (1m) ~ 4 L (4m) -
6 L (6m) ~ 9L (9m) -
11L( 11m) -
長さ指定 12L (12m) -
13L (13m) -
14L (14m) -
15L (15m) -
(注) 下記ケーブルの合計金額となります。
モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
7 IXA-4NSW4518/4NSW4533
Page9
お問合わせは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容 内容
4軸仕様 項目 4軸仕様
最大可搬質量(kg)(注1) 8
合成最高速度(mm/s) 6981 位置繰返し精度 水平面内 ±0.01mm
(注4) 上下軸 ±0.01mm
速度 第1アーム(度/s) 500 回転軸 ±0.005度
(注2) 各軸最高速度 第2アーム(度/s) 700 ユーザー配線 10心(9心+シールド) AWG24(定格30V/MAX1A)
上下軸(mm/s) 1600 ユーザー配管 外径φ6 内径φ4 エアチューブ3本
回転軸(度/s) 2000 (最高使用圧力0.6MPa)
押付け(N)(注3) 上限 110 ブレーキ解除スイッチ(注5) 上下軸落下防止用ブレーキ解除スイッチ
下限 25 先端軸 許容トルク 3.2N・m
アーム長(mm) 450 許容負荷モーメント 9.6N・m
各軸アーム長(mm) 第1アーム 200 主要部材質 38ペ ージをご確認ください
第2アーム 250 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±137 保護等級 IP65(ジャバラ部は除く)
各軸動作範囲 第2アーム(度) ±133 エアパージ圧力(注6) 35kPa
上下軸(mm) 180/330 耐振動・耐衝撃 衝撃・振動が加わらないこと
回転軸(度) ±360 騒音(注7) 80dB以下
海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 600W
モーター容量 第2アーム 400W
上下軸 200W
回転軸 100W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 16384 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.38秒 4軸仕様 0.12 kg・m2
連続サイクルタイム 0.55秒
スカラロボットの先端軸(回転軸)中心換算の慣性モーメント許容値です。
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした 先端軸中心からツール重心までのオフセット量は、以下の数値以内としてください。
場合の所要時間を表します。 ツール重心位置が先端軸中心位置を離れた場合は、速度・加速度を適宜落とす必要があ
2kg搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) ります。負荷や動作条件によって、張出し長は制限されます。
【標準サイクルタイム】
最速動作の場合の所要時間です。一般に高速性能の目安となります。最速動作での連続
動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
先端軸
上下移動
負荷
重心
水平方向
水平方向 上下方向
120mm以下 100mm以下
■ 押付け力と電流制限値の相関図(参考値)
上下軸の先端部の押付け力です。(注3)
120
110
100
85
80
60 50
40
25
20
0
0 20 40 60 80
押付け電流制限値(%)
IXA-4NSW4518/4NSW4533 8
押付け力(N)
上下方向
Page10
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、デューティー比設定の目安グラフを参考に停止時間を設
けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの連続運転目安範囲の設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも可搬質量が異なると、動作時間も異なりますのでご注意ください。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、デューティー比設定の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合はできるだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、可搬質量は許容値以下としてください。
(7) 可搬質量は回転軸中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NSW45 PTP加減速度設定の目安 NSW45 PTP動作デューティー比設定の目安
100% 100%
90% 最大設定範囲 90%
80% 80%
70% 70% g
8.0
k
60% 60%
50% 50% 50%
g
40% 40% 5.5k
3.0kg,
30% 30%
20% 連続運転目安範囲 20%
10% 10%
0% 0%
0 1 2 3 4 5 6 7 8 100% 80% 60% 40% 20% 0%
搬送負荷質量(kg) デューティー比(%)
0 負荷慣性モーメント(kg・m2) 0.12
9 IXA-4NSW4518/4NSW4533
加減速度(%)
加減速度(%)
Page11
お問合わせは
0800-888-0088 IXA スカラロボット
■ CP動作
水平 上下
NSW45 CP加減速度設定の目安 NSW45 CP加減速度設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
2 2.5
最大設定範囲 最大設定範囲
最大速度2000mm/s 最大速度1600mm/s
2
1.5
1.5
1
1
連続運転目安範囲
0.5
0.5 最大速度1200mm/s
連続運転目安範囲
最大速度1100mm/s 0.3
0 0
0 1 2 3 4 5 6 7 8 0 1 2 3 4 5 6 7 8
搬送負荷質量(kg) 搬送負荷質量(kg)
0 負荷慣性モーメント(kg・m2) 0.12 0 負荷慣性モーメント(kg・m2) 0.12
NSW45 CP 動作デューティー比設定の目安 NSW45 CP 動作デューティー比設定の目安
上下軸 (Z 軸 ) なし水平移動動作 上下軸 (Z 軸 ) のみの動作
2 2.5
8.0kg 2
1.5
kg
3.0 5.5kg
1.5
1
1
0.5 8.0kg
0.5
0.3
0 0
100% 80% 60% 40% 20% 0% 100% 80% 60% 40% 20% 0%
デューティー比(%) デューティー比(%)
■ CP動作 速度・加減速度制限
NSW45 上下軸(Z軸)動作なし水平移動動作 NSW45 上下軸(Z軸)のみの動作
2500 2500
2000
2000 1800 2000
1600 1600
1400
1500 2.0G 2.0G 1500 1200
2.0G
1.5G 2.5G 2.5G
1000 1000
1.5G
1.5G
500 500
0 0
0 1 2 3 4 5 6 7 8 0 1 2 3 4 5 6 7 8
搬送負荷質量(kg) 搬送負荷質量(kg)
IXA-4NSW4518/4NSW4533 10
CP速度(mm/s) 加減速度(G) 加減速度(G)
3.0kg, 5.5kg
CP速度(mm/s) 加減速度(G) 加減速度(G)
Page12
IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
■ IXA-4NSW4518
(注) ケーブル接続に関しては3 6 ページ(注8)をご参照ください。 ST:ストローク
M.E.:メカニカルエンド
ユーザー配線用LF10コネクター 基準面 S.E.:ストロークエンド
(9極、レセプタクル) W
配線:24AWG、
10心(9心+シールド)
3-φ6エアチューブ
ワンタッチ継手 黒
Y Y
赤
乾燥空気排気用 白
φ6エアチューブ 詳細図 K
ワンタッチ継手 85 K
22.5 125 ベース取付け穴詳細
詳細図 W 172 φ22
265 φ11
ユーザーパネル詳細
695
65 450 180
250 200 断面図 Y-Y
(4箇所)
ブレーキ解除スイッチ
ジャバラ内圧力調整用
φ16エアチューブワンタッチ継手
乾燥空気吸気用
X φ8スピードコントローラー
4-M4深さ8
M.E. (反対側も同様)
原点
P 40
(200) M4深さ10(アース接続用)
基準面 85 142 (33.1)配線空間 モーター・エンコーダー
ケーブル接続 モーター・エンコーダー
S.E. 着座面 (第1アーム) ケーブル接続
(第2アーム・上下軸・回転軸)
M.E.
Q
φ70 172 10 + 0 . 0 1 5 深さ6 ユーザー配線用ケーブル
0
) 3-φ6エアチューブ 先端:D-subコネクター
0 h7 (ベース着座面より) R
2 ( ワンタッチ継手 (15極、プラグ、固定具M2.6)
φ 赤 配線:24AWG、10心(9心+シールド)
白 黒
Z Z 断面図 Z-Z スプライン
封止キャップ
85 詳細図 Q 詳細図 X
φ10 H7リーマー深さ10 ベース長穴詳細 背面パネル詳細
詳細図 P
R450 R185.2
R185.2 R450
R200 R200
R25 0
0 R25
175 115
34.1° 47.9°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 4軸仕様 52.0kg
11 IXA-4NSW4518/4NSW4533
53
1010
19 648.5
198.5 74.5 40
117 63
5 180ST 5 156
125
100
137°
147
10 160 90
90
150 15
180 (30.3)
329 121
561
12 592 (20.8)
137°
15
R25 1
0 33°
89 53.5
137
°
°
137
0
133
° R25
Page13
お問合わせは
0800-888-0088 IXA スカラロボット
■ IXA-4NSW4533
(注) ケーブル接続に関しては3 6 ページ(注8)をご参照ください。 ST:ストローク
ユーザー配線用LF10コネクター M.E.:メカニカルエンド
(9極、レセプタクル) S.E.:ストロークエンド
配線:24AWG、 基準面
10心(9心+シールド) W
3-φ6エアチューブ
ワンタッチ継手 黒
赤
乾燥空気排気用 白 Y Y
φ6エアチューブ
ワンタッチ継手
85 詳細図 K
詳細図 W 22.5 125 K ベース取付け穴詳細
ユーザーパネル詳細 172
265 φ22
695 φ11
65 450 180
250 200
断面図 Y-Y
(4箇所)
ブレーキ解除スイッチ
ジャバラ内圧力調整用
φ16エアチューブ
ワンタッチ継手
X 乾燥空気吸気用
φ8スピードコントローラー
4-M4深さ8
M.E. (反対側も同様)
原点
P 40
(200) モーター・エンコーダー M4深さ10(アース接続用)
基準面 85 142 (33.1) 配線空間 ケーブル接続 モーター・エンコーダー
(第1アーム) ケーブル接続
着座面 (第2アーム・上下軸・回転軸)
S.E.
φ70 Q
M.E. 172
10 + 0. 0 10 5深さ6
h7 (ベース着座面より) ) ユーザー配線用ケーブル
φ20 (R 3-φ6エアチューブ
ワンタッチ継手 先端:D-subコネクター
(15極、プラグ、固定具M2.6)
赤 配線:24AWG、10心(9心+シールド)
白 黒
Z Z 断面図 Z-Z スプライン
封止キャップ
85
φ10 H7リーマー深さ10 詳細図 Q 詳細図 X
詳細図 P ベース長穴詳細 背面パネル詳細
R450 R185.2
R185.2 R450
R200 R200
R25 0
0 R25
175 115
34.1° 47.9°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 4軸仕様 53.0kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
最大接続 制御方法
名称 外観 可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページ
DV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-RAX4/SAX4(IXA用) 4 三相AC200V - - ● ● ● ● ● - - - ● ● - - - 36666 - 4 5
(注) DV、CCなどのネットワーク略称記号については、総 合カタログ2022・8-15ペ ージをご確認ください。
IXA-4NSW4518/4NSW4533 12
53
1010
19
798.5
198.5 74.5 40
267 63 156
5 330ST 5 125
100
137°
147
10 160 90
90
150 15
180 (30.3)
329 121
12 561
592 (20.8)
137°
R25 1
0 33° 15
89 53.5
37°1
137
°
° 25
0
133 R
Page14
IXA-4NSW6018、IXA-4NSW6033
IXA スカラロボット
IXA-4NSW6018 防塵
・ バッテリー アーム長
レスアブソ 600
IXA-4NSW6033 防滴 mm
■ 型式項目
I XA - 4 NSW 60 - - T 2
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー
4 4軸 NSW 高速タイプ 防塵・防滴仕様 60 600mm 18 180mm N 無し T2 XSEL-RAX/SAX
33 330mm 5L 5m
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、 35 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NSW6018 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
IXA-4NSW6033 - が出る場合があります。連続動作を行う際は加減速値を下げるか、
選定上の デューティー比(目安)を参考にして加減速後に停止時間を設けてく
■ 別売オプション価格表(標準価格) 注意 ださい。
(3)ジャバラに直接噴流をかけないでください。ジャバラ給排気用継手に
名称 型式 参照頁 標準価格 はφ 16 エアチューブを接続し、先端を清浄な空間に開放してください。
ユーザーケーブル CB-IXA-USR□□□-CS 4 1 - (4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。動
ユーザー配線用メタルキャップ IXA-MC-1 4 0 - 作可能条件は「加減速度設定の目安」をご確認ください。
フランジ IX-FL-1 40 - (5)ケーブルジョイント部は保護構造ではないため、水のかからない清浄
(注) 別途ご注文ください。 なところに設置してください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L (5m) -
10L (10m) -
1L (1m) ~ 4 L (4m) -
6 L (6m) ~ 9L (9m) -
11L (11m) -
長さ指定 12L (12m) -
13L (13m) -
14L (14m) -
15L (15m) -
(注) 下記ケーブルの合計金額となります。
モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
13 IXA-4NSW6018/4NSW6033
Page15
お問合わせは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容 内容
4軸仕様 項目 4軸仕様
最大可搬質量(kg()注1) 10
合成最高速度(mm/s) 6039 位置繰返し精度 水平面内 ±0.01mm
第1アーム(度/s) 285 (注4) 上下軸 ±0.01mm
速度 回転軸 ±0.005度
(注2) 各軸最高速度 第2アーム(度/s) 700 ユーザー配線 10心(9心+シールド) AWG24(定格30V/MAX1A)
上下軸(mm/s) 1600 ユーザー配管 外径φ6 内径φ4 エアチューブ3本
回転軸(度/s) 2000 (最高使用圧力0.6MPa)
押付け(N)(注3) 上限 110 ブレーキ解除スイッチ(注5) 上下軸落下防止用ブレーキ解除スイッチ
下限 25 先端軸 許容トルク 3.2N・m
アーム長(mm) 600 許容負荷モーメント 9.6N・m
各軸アーム長(mm) 第1アーム 350 主要部材質 38ペ ージをご確認ください
第2アーム 250 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±137 保護等級 IP65(ジャバラ部は除く)
各軸動作範囲 第2アーム(度) ±133 エアパージ圧力(注6) 35kPa
上下軸(mm) 180/330 耐振動・耐衝撃 衝撃・振動が加わらないこと
回転軸(度) ±360 騒音(注7) 80dB以下
海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 750W
モーター容量 第2アーム 400W
上下軸 200W
回転軸 100W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 16384 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.38秒 4軸仕様 0.12 kg・m2
連続サイクルタイム 0.57秒
スカラロボットの先端軸(回転軸)中心換算の慣性モーメント許容値です。
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした 先端軸中心からツール重心までのオフセット量は、以下の数値以内としてください。
場合の所要時間を表します。 ツール重心位置が先端軸中心位置を離れた場合は、速度・加速度を適宜落とす必要があ
2kg搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) ります。負荷や動作条件によって、張出し長は制限されます。
【標準サイクルタイム】
最速動作の場合の所要時間です。一般に高速性能の目安となります。最速動作での連続
動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
先端軸
上下移動
負荷
重心
水平方向
水平方向 上下方向
120mm以下 100mm以下
■ 押付け力と電流制限値の相関図(参考値)
上 下軸の先端部の押付け力です。(注3)
120
110
100
85
80
60
50
40
25
20
0
0 20 40 60 80
押付け電流制限値(%)
IXA-4NSW6018/4NSW6033 14
押付け力(N)
上下方向
Page16
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、デューティー比設定の目安グラフを参考に停止時間を設
けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの連続運転目安範囲の設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも可搬質量が異なると、動作時間も異なりますのでご注意ください。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、デューティー比設定の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合はできるだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、可搬質量は許容値以下としてください。
(7) 可搬質量は回転軸中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NSW60 PTP加減速度設定の目安 NSW60 PTP動作デューティー比設定の目安
100% 100%
90% 最大設定範囲 90%
g
80% 80% .0k .0kg
75% 10 3
75%
70% 70%
60% 60%
50%
50% 50%
40% 連続運転目安範囲 40%
30% 30%
20% 20%
10% 10%
0% 0%
0 1 2 3 4 5 6 7 8 9 10 100% 80% 60% 40% 20% 0%
搬送負荷質量(kg) デューティー比(%)
0 負荷慣性モーメント(kg・m2) 0.12
15 IXA-4NSW6018/4NSW6033
加減速度(%)
加減速度(%)
6.5kg
Page17
お問合わせは
0800-888-0088 IXA スカラロボット
■ CP動作
水平 上下
NSW60 CP加減速度設定の目安 NSW60 CP加減速度設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
2 2
最大設定範囲
最大設定範囲
最大速度2000mm/s
最大速度1600mm/s
1.5 1.5
1 1 連続運転目安範囲
最大速度1600mm/s
連続運転目安範囲
最大速度1800mm/s
0.5 0.5
0.3
0 0
0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10
搬送負荷質量(kg) 搬送負荷質量(kg)
0 負荷慣性モーメント(kg・m2) 0.12 0 負荷慣性モーメント(kg・m2) 0.12
NSW60 CP動作デューティー比設定の目安 NSW60 CP動作デューティー比設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
2 2
3.0kg, 6.5kg, 10.0kg 3.0kg
1.5 1.5
kg
6.5
1 1
8.0kg
0.5 0.5
0.3
0 0
100% 80% 60% 40% 20% 0% 100% 80% 60% 40% 20% 0%
デューティー比(%) デューティー比(%)
■ CP動作 速度・加減速度制限
NSW60 上下軸(Z軸)動作なし水平移動動作 NSW60 上下軸(Z軸)のみの動作
2500 2000
2000 1800 1600
2000 1800 1600 1440
1600 1280
1400
1500 1200 1.5G 1.5G
0.8G 0.8G
0.8G 1.0G
1000
0.8G
1000 0.5G 800
600
500 400
200
0 0
0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10
搬送負荷質量(kg) 搬送負荷質量(kg)
IXA-4NSW6018/4NSW6033 16
CP速度(mm/s) 加減速度(G) 加減速度(G)
CP速度(mm/s) 加減速度(G) 加減速度(G)
Page18
IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
■ IXA-4NSW6018
(注) ケーブル接続に関しては3 6 ページ(注8)をご参照ください。 ST:ストローク
M.E.:メカニカルエンド
ユーザー配線用LF10コネクター 基準面 S.E.:ストロークエンド
(9極、レセプタクル) W
配線:24AWG、
10心(9心+シールド)
3-φ6エアチューブ
ワンタッチ継手 黒 Y Y
赤 白
乾燥空気排気用 詳細図 K
φ6エアチューブ 85 K ベース取付け穴詳細
ワンタッチ継手 22.5 125
詳細図 W 172 φ22
265 φ11
ユーザーパネル詳細 845
65 600 180
250 350
断面図 Y-Y
(4箇所)
ブレーキ解除スイッチ
ジャバラ内圧力調整用
φ16エアチューブワンタッチ継手
乾燥空気吸気用
X φ8スピードコントローラー
4-M4深さ8
M.E. (反対側も同様)
原点
P 40
(200)
基準面 モーター・エンコーダー M4深さ10(アース接続用)
85 142 (33.1)配線空間 ケーブル接続 モーター・エンコーダー
S.E. 着座面 (第1アーム) ケーブル接続
(第2アーム・上下軸・回転軸)
φ70 M.E. Q
172
10+ 0 .0 1 5 深さ6 3-φ6エアチューブ ユーザー配線用ケーブル
7 0
h (ベース着座面より) )ワンタッチ継手 先端:D-subコネクター
20
φ (R (15極、プラグ、固定具M2.6)
赤 配線:24AWG、10心(9心+シールド)
白 黒
Z Z スプライン
断面図 Z-Z 封止キャップ
85 詳細図 Q 詳細図 X
φ10 H7リーマー深さ10
詳細図 P ベース長穴詳細 背面パネル詳細
R 0
6 0
00 R6
350 R3
R 50
R250 R250
175 115
57.8° 72.7°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 4軸仕様 53.0kg
17 IXA-4NSW6018/4NSW6033
53
1010
19 648.5
198.5 74.5 40
117 63
5 180ST 5 156
125
100
137°
147
R256.2
10 160 90
90
150 15
329 121 180 30.3
12 561
592 (20.8)
137°
R250
13 15
3°
89 53.5
137
°
6.2
25R
137
°
0
R25
33°1
Page19
お問合わせは
0800-888-0088 IXA スカラロボット
■ IXA-4NSW6033
(注) ケーブル接続に関しては3 6 ページ(注8)をご参照ください。 ST:ストローク
ユーザー配線用LF10コネクター M.E.:メカニカルエンド
(9極、レセプタクル) S.E.:ストロークエンド
配線:24AWG、 W 基準面
10心(9心+シールド)
3-φ6エアチューブ
ワンタッチ継手 黒
乾燥空気排気用 赤 白 Y Y
φ6エアチューブ
ワンタッチ継手 85 詳細図 K
22.5 125 K
詳細図 W ベース取付け穴詳細
172
ユーザーパネル詳細 265
φ22
845 φ11
65 600 180
250 350
断面図 Y-Y
(4箇所)
ブレーキ解除スイッチ
ジャバラ内圧力調整用
φ16エアチューブ
ワンタッチ継手
乾燥空気吸気用
X φ8スピードコントローラー
4-M4深さ8
M.E. (反対側も同様)
原点
P 40
基準面 (200) モーター・エンコーダー M4深さ10(アース接続用)
85 142 (33.1)配線空間 ケーブル接続
着座面 モーター・エンコーダー
(第1アーム) ケーブル接続
φ70 S.E. (第2アーム・上下軸・回転軸)
M.E. 172 Q
7 ユーザー配線用ケーブル
0 h
2 10 + 0 . 0 1 5 深さ6 3-φ6エアチューブ 先端:D-subコネクター
φ 0
(ベース着座面より) R) ワンタッチ継手 (15極、プラグ、固定具M2.6)
配線:24AWG、10心(9心+シールド)
(
Z Z スプライン 赤
白 黒
断面図 Z-Z 封止キャップ
85 φ10 H7リーマー深さ10
詳細図 P 詳細図 Q 詳細図 X
ベース長穴詳細 背面パネル詳細
R600 R600
0 R3
R35 50
R250 R250
175 115
57.8° 72.7°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 4軸仕様 54.0kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
制御方法
名称 外観 最大接続
可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページ
DV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-RAX4/SAX4(IXA用) 4 三相AC200V - - ● ● ● ● ● - - - ● ● - - - 36666 - 45
(注) DV、CCなどのネットワーク略称記号については、 総合カタログ2022・8-15 ページをご確認ください。
IXA-4NSW6018/4NSW6033 18
53
1010
19 798.5
198.5 74.5 40
267 63 156
5 330ST 5 125
100
137°
147
R256.2
90
10 160 90
150 15
180 (30.3)
12 329 121
561
592 (20.8)
137°
R250 15
133°
89 53.5
137
°
.2
25
6
R
137
°
R25
0
°
133
Page20
IXA-4NSW8020、IXA-4NSW8040
IXA スカラロボット
IXA-4NSW8020 防塵
・ バッテリー アーム長
レスアブソ 800
IXA-4NSW8040 防滴 mm
■ 型式項目
I XA - 4 N SW 8 0 - - T2 -
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー - オプション
4 4軸 NSW 高速タイプ 防塵・防滴仕様 80 800mm 20 200mm N 無し T2 XSEL-SAX 下記オプション
40 400mm 5L 5m 価格表参照
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、 35 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NSW8020 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
IXA-4NSW8040 - 選定上の が出る場合があります。連続動作を行う際は加減速値を下げるか、
デューティー比(目安)を参考にして加減速後に停止時間を設けてく
■ 注意
オプション価格表(標準価格) ださい。
(3)ジャバラに直接噴流をかけないでください。
名称 型式 参照頁 標準価格 (4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。動
樹脂カバーニッケルめっき仕様 COP 40 - 作可能条件は「加減速度設定の目安」をご確認ください。
(5)ケーブルジョイント部は保護構造ではないため、水のかからない清浄
■ 別売オプション価格表(標準価格) なところに設置してください。
名称 型式 参照頁 標準価格
ユーザーケーブル CB-IXA-USR□□□-CS 41 -
フランジ IXA-FL-1 4 0 -
メタルキャップ IXA-MC-1 40 -
外部配線保護フランジ IXA-PFL-EW-1 41 -
Z軸配線側面ステー Z軸200st IXAW-SST-ZW-1 41 -
Z軸400st IXAW-SST-ZW-2 41 -
Z軸配線上面ステー Z軸200st IXA-TST-ZW-1 41 -
Z軸400st IXA-TST-ZW-2 4 1 -
(注) 別途ご注文ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L (5m) -
1 0L (10m) -
1L (1m) ~ 4 L( 4m) -
6 L( 6m) ~ 9L (9m) -
11L (11m) -
長さ指定 12L( 12m) -
13L( 13m) -
1 4L( 14m) -
1 5L (15m) -
(注) 下記ケーブルの合計金額となります。
モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
19 IXA-4NSW8020/4NSW8040