




●スカラロボットIXA クリーンルーム仕様 ISOクラス3対応
このカタログについて
| ドキュメント名 | スカラロボットIXA クリーンルーム仕様 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 9.8Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社アイエイアイ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
クリーンルーム仕様 スカラロボット IXA-4NSC
代理店
Page2
特徴
SCARA Robot IXA
クリーンルーム仕様 ISOクラス3対応
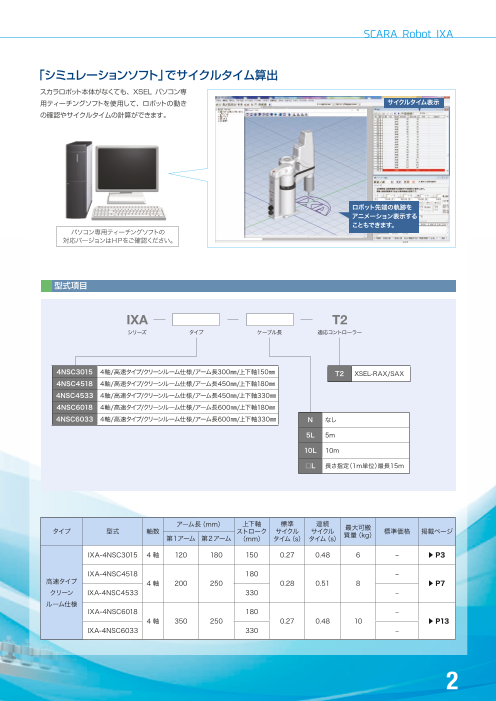
スカラロボット 「シミュレーションソフト」でサイクルタイム算出
スカラロボット本体がなくても、XSEL パソコン専
用ティーチングソフトを使用して、ロボットの動き サイクルタイム表示
の確認やサイクルタイムの計算ができます。
クリーン環境下で、組立・搬送装置をご検討の方必見!
ロボット先端の軌跡を
アニメーション表示する
こともできます。
業界最速! パソコン専用ティーチングソフトの
※クリーンルーム仕様 対応バージョンはHPをご確認ください。
標準サイクルタイム
(IXA-4NSC4518)
0.28秒
▶2kg搬送 水平移動
動作
条件 ▶水平移動300mm 上下
移動
上下移動25mm
医療用ボトルのピック&プレース
パーツフィーダーから供給されるワークをつかみ
高速動作で次工程のコンベアーへ移送します
動画はこちらから
ご覧ください。
1
Page3
型式項目
SCARA Robot IXA
クリーンルーム仕様 ISOクラス3対応
スカラロボット 「シミュレーションソフト」でサイクルタイム算出
スカラロボット本体がなくても、XSEL パソコン専
用ティーチングソフトを使用して、ロボットの動き サイクルタイム表示
の確認やサイクルタイムの計算ができます。
クリーン環境下で、組立・搬送装置をご検討の方必見!
ロボット先端の軌跡を
アニメーション表示する
こともできます。
業界最速! パソコン専用ティーチングソフトの
※クリーンルーム仕様 対応バージョンはHPをご確認ください。
標準サイクルタイム
(IXA-4NSC4518)
0.28 型式項目
秒
▶2kg搬送 水平移動 IXA T2
動作 ▶水平移動300mm 上下 シリーズ タイプ ケーブル長 適応コントローラー
条件 移動
上下移動25mm
4NSC3015 4軸/高速タイプ/クリーンルーム仕様/アーム長300㎜/上下軸150㎜ T2 XSEL-RAX/SAX
4NSC4518 4軸/高速タイプ/クリーンルーム仕様/アーム長450㎜/上下軸180㎜
4NSC4533 4軸/高速タイプ/クリーンルーム仕様/アーム長450㎜/上下軸330㎜
4NSC6018 4軸/高速タイプ/クリーンルーム仕様/アーム長600㎜/上下軸180㎜
4NSC6033 4軸/高速タイプ/クリーンルーム仕様/アーム長600㎜/上下軸330㎜ N なし
5L 5m
10L 10m
□L 長さ指定(1m単位)最長15m
医療用ボトルのピック&プレース 上下軸 標準 連続
パーツフィーダーから供給されるワークをつかみ アーム長(mm)
タイプ 型式 軸数 ストローク サイクル サイクル 最大可搬
高速動作で次工程のコンベアーへ移送します 第1アーム 第2アーム (mm) タイム(s) タイム(s) 質量(kg) 標準価格 掲載ページ
IXA-4NSC3015 4 軸 120 180 150 0.27 0.48 6 – ▶ P3
動画はこちらから
ご覧ください。 IXA-4NSC4518 180 –
高速タイプ 4軸 200 250 0.28 0.51 8 ▶ P7
クリーン IXA-4NSC4533 330 –
ルーム仕様
IXA-4NSC6018 180 –
4 軸 350 250 0.27 0.48 10 ▶ P13
IXA-4NSC6033 330 –
2
Page4
製品仕様・図面、IXA-4NSC3015
IXA スカラロボット
IXA-4NSC3015 バッテリー アーム長
クリーン レスアブソ 300mm
■ 型式項目
I XA - 4 NSC 3 0 15 - - T2
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー
4 4軸 NSC 高速タイプ クリーンルーム仕様 30 300mm 15 150mm N 無し T2 XSEL-RAX/SAX
5L 5m
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、1 9 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NSC3015 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
が出る場合があります。連続動作を行う際は加減速値を下げるか、
■ 別売オプション価格表(標準価格) 選定上の デューティー比(目安)を参考にして加減速後に停止時間を設けてく
注意 ださい。
名称 型式 参照頁 標準価格 (3)スカラロボットは 100%の速度・加速度で連続運転は出来ません。
ユーザーケーブル CB-IXA-USR□□□-CS 2 0 - 動作可能条件は「加減速度設定の目安」ページをご確認ください。
フランジ IX-FL-1 2 0 - (4)クリーン度規格については、 19 ページをご参照ください。
(注) 別途ご注文ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L (5m) -
10L (10m) -
1L (1m) ~ 4L (4m) -
6L (6m) ~ 9L (9m) -
1 1L (11m) -
長さ指定 12L( 12m) -
13L (13m) -
14L (14m) -
1 5L( 15m) -
(注) 下記ケーブルの合計金額となります。
[4軸仕様]モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
3 IXA-4NSC3015
Page5
お問合せは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容 内容
4軸仕様 項目 4軸仕様
最大可搬質量(kg()注1) 6 水平面内 ±0.01mm
合成最高速度(mm/s) 6032 位置繰返し精度 上下軸 ±0.01mm
速度 第1アーム(度/s) 720 (注5) 回転軸 ±0.005度
(注2) 各軸最高速度 第2アーム(度/s) 720 ユーザー配線 10芯(9芯+シールド) AWG24(定格30V/MAX1A)
上下軸(mm/s) 1600 ユーザー配管 外径φ4 内径φ2.5 エアチューブ3本
回転軸(度/s) 1600 (最高使用圧力0.6MPa)
押付け(N)(注3) 上限 125 LED表示灯(注6) アンバー色LED 小型表示灯1個 DC24V供給必要
下限 25 ブレーキ解除スイッチ(注7) 上下軸落下防止用ブレーキ解除スイッチ
クリーンルーム仕様(注4) 吸引量(NL/min) 50 許容トルク 3.2N・m
アーム長(mm) 300 先端軸 許容負荷モーメント 9N・m
各軸アーム長(mm) 第1アーム 120 クリーン度 クラス3 (ISO14644-1)
第2アーム 180 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±126 保護等級 IP40
各軸動作範囲 第2アーム(度) ±128 耐振動・耐衝撃 衝撃・振動が加わらないこと
上下軸(mm) 150 騒音(注8) 80dB以下
回転軸(度) ±360 海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 600W
モーター容量 第2アーム 400W
上下軸 150W
回転軸 100W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 131,072 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.27秒 4軸仕様 0.12 kg・m2
連続サイクルタイム 0.48秒
スカラロボットの先端軸(回転軸)中心換算の慣性モーメント許容値です。先端軸中心か
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした らツール重心までのオフセット量は、以下の数値以内としてください。ツール重心位置
場合の所要時間を表します。 が先端軸中心位置を離れた場合は、速度・加速度を適宜落とす必要があります。負荷や
2kg 搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) 動作条件によって張出し長は制限されます。
【標準サイクルタイム】
最速動作の場合の所要時間です。一般に高速性能の目安となります。
最速動作での連続動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
先端軸
上下移動
負荷
重心
水平方向
水平方向 上下方向
150mm以下 100mm以下
■ 押付け力と電流制限値の相関図(参考値)
上下軸の先端部の押付け力です。(注3)
140
125
120
100 95 100
80
65 70
60
50
40 40
20 25
0
0 10 20 30 40 50 60 70 80 90 100
押付け電流制限値(%)
IXA-4NSC3015 4
押付け力(N)
上下方向
Page6
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティー比の目安グラフを参考に停止時間
を設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの、連続運転目安範囲の加減速度設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティー比の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合はできるだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、搬送質量は許容値以下としてください。
(7) 可搬質量は回転軸中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NSC30 PTP加減速度設定の目安 NSC30 PTP動作デューティー比設定の目安
100% 100%
6kg
90% 90%
g
80% 最大設定範囲 k
80% 4.5
70% 70%
60% 60%
50% 50% 2kg
40% 40%
30% 連続運転目安範囲 30%
20% 20%
10% 10%
0% 0%
0 1 2 3 4 5 6 100% 80% 75% 60%50%40% 20% 0%
搬送負荷質量(kg) デューティー比(%)
0 負荷慣性モーメント(kg・m2) 0.12
■ CP動作
水平 上下 ■ CP動作 速度・加減速度制限
NSC30 CP加減速度設定の目安 NSC30 CP加減速度設定の目安 NSC30 上下軸(Z軸)動作なし水平移動動作
1600
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作 2.0G 2.0G
2.5G 2.5G 1400 1.5G
最大設定範囲 1200
2.0G 2.0G 最大速度1600mm/s 1080
1000
1.0G
800
1.5G 1.5G 600
1.2G 400
1.0G 最大設定範囲 1.0G 200
連続運転目安範囲 連続運転目安範囲 0
0 1 2 3 4 5 6
0.5G 最大速度1400mm/s 0.5G 搬送負荷質量(kg)
0.0G 0.0G
0 1 2 3 4 4.5 5 6 0 1 2 3 4 4.5 5 6 NSC30 上下軸(Z軸)動作のみの動作
搬送負荷質量(kg) 搬送負荷質量(kg) 1800
2.0G 2.0G
1600
0 1.2G
負荷慣性モーメント(kg・m2) 0.12 1400
1200
1000
960
NSC30 CP動作デューティー比設定の目安 NSC30 CP動作デューティー比設定の目安 800 0.5G
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
2.5G 2.5G 600
400
2kg 2kg 200
2.0G 2.0G
0
0 1 2 3 4 5 6
4.5kg 4.5kg 搬送負荷質量(kg)
1.5G 1.5G
6kg 1.2G
6kg
1.0G 1.0G
0.5G 0.5G
0.0G 0.0G
100% 80% 60% 40% 20% 0% 100% 80% 75% 60% 40% 20% 0%
デューティー比(%) デューティー比(%)
5 IXA-4NSC3015
加減速度(G) 加減速度(G) 加減速度(%)
加減速度(G) 加減速度(G) 加減速度(%)
CP速度(mm/s) CP速度(mm/s)
Page7
お問合せは
0800-888-0088 IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
ST:ストローク
(注) ケーブル接続に関しては1 9 ページ(注9)を参照ください。 M.E.:メカニカルエンド
S.E.:ストロークエンド
M4深さ8(アース接続用)
ユーザー配線用D-subコネクター 166
4-M5深さ8 81 W 基準面 115 2-M5深さ8
(9極、ソケット、固定具M2.6) R10.5
配線:24AWG、10芯(9芯+シールド)
(コネクターフード付き) 2-M4深さ8
3-φ4エアチューブ
ワンタッチ継手 Y Y
10.5
黒 詳細図 K
白 膜付グロメット 141 92.5 K
15 155 ベース取付け穴詳細
黄 182 φ9
251.5
詳細図 W (545.5)
ユーザーパネル詳細 56.5 300 (189)
180 120 断面図 Y-Y
(4箇所)
LED表示灯(アンバー色)
ブレーキ解除スイッチ
M.E.
P X
原点 吸引用配管継手適用チューブ
外径φ12(内径φ8)
ブレーキケーブル接続
S.E. モーター・エンコーダーケーブル接続
(1軸目)
M.E. モーター・エンコーダーケーブル接続
(100) (2~4軸目)
基準面
92.5 155.9 配線空間
3-φ4エアチューブ
着座面(33.1) ワンタッチ継手
ユーザー配線用D-subコネクター
(15極、プラグ、固定具M2.6)
4-M4深さ8 3125 Q 配線:24AWG、10芯(9芯+シールド)
φ45 0h7 (コネクターフード付き)
φ2 黄 白 黒 10 + 00 . 0 1 5 深さ6
(ベース着座面より)
Z Z R)
(
断面図 Z-Z φ8深座ぐり深さ3 詳細図 X
(M4口元()1箇所のみ) 92.5 背面パネル詳細
詳細図 P φ10 H7リーマー深さ6 詳細図 Q
ベース長穴詳細
R300 1 R1 300
R142. 42.1 R
R120 R120
R1 R180
80
54° 54°
100 100
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 28.0kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
最大接続 制御方法
名称 外観 可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページ
DV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-RAX4/SAX4(IXA用) 4 三相AC200V - - ● ● ● ● ● - - - ● ● - - - 36666 - 総合カタログ
(タイプにより異なります) 2021・7-291
(注) DV、CCなどのネットワーク略称記号については、 総合カタログ2021・7-17ペ ージをご確認ください。
IXA-4NSC3015 6
126° 61.5
1010
19
687.5
347.5
184
85 5 150ST 5 142
62 (104.3)
40
260.4
50 40
126° 4015 140 85
(103.7)
378 140 15
648 (5) 167.5
R18 10 28°
12
16 2 10.5
126
°
°
126
28°
0
1 R1
8
Page8
IXA-4NSC4518、IXA-4NSC4533
IXA スカラロボット
IXA-4NSC4518 アーム長
クリーン バッテリー
レスアブソ 450
IXA-4NSC4533 mm
■ 型式項目
I XA - 4 NSC 45 - - T 2
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー
4 4軸 NSC 高速タイプ クリーンルーム仕様 45 450mm 18 180mm N 無し T2 XSEL-RAX/SAX
33 330mm 5L 5m
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、 19 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NSC4518 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
IXA-4NSC4533 - が出る場合があります。連続動作を行う際は加減速値を下げるか、
選定上の デューティー比(目安)を参考にして加減速後に停止時間を設けてく
■ 別売オプション価格表(標準価格) 注意 ださい。
(3)スカラロボットは 100%の速度・加速度で連続運転は出来ません。
名称 型式 参照頁 標準価格 動作可能条件は「加減速度設定の目安」ページをご確認ください。
ユーザーケーブル CB-IXA-USR□□□-CS 20 -
フランジ IX-FL-1 20 - (4)クリーン度規格については、 19 ページをご参照ください。
(注) 別途ご注文ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L( 5m) -
10L( 10m) -
1L( 1m) ~ 4L( 4m) -
6L (6m) ~ 9 L (9m) -
11L( 11m) -
長さ指定 12L (12m) -
13L (13m) -
14L( 14m) -
15L (15m) -
(注) 下記ケーブルの合計金額となります。
[4軸仕様]モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
7 IXA-4NSC4518/4NSC4533
Page9
お問合せは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容 内容
4軸仕様 項目 4軸仕様
最大可搬質量(kg)(注1) 8 水平面内 ±0.01mm
合成最高速度(mm/s) 6623 位置繰返し精度 上下軸 ±0.01mm
速度 第1アーム(度/s) 510 (注5) 回転軸 ±0.005度
(注2) 各軸最高速度 第2アーム(度/s) 800 ユーザー配線 10芯(9芯+シールド) AWG24(定格30V/MAX1A)
上下軸(mm/s) 1600 ユーザー配管 外径φ6 内径φ4 エアチューブ3本
回転軸(度/s) 2000 (最高使用圧力0.6MPa)
押付け(N)(注3) 上限 135 LED表示灯(注6) アンバー色LED 小型表示灯1個 DC24V供給必要
下限 25 ブレーキ解除スイッチ(注7) 上下軸落下防止用ブレーキ解除スイッチ
クリーンルーム仕様(注4) 吸引量(NL/min) 50 許容トルク 3.2N・m
アーム長(mm) 450 先端軸 許容負荷モーメント 8.3N・m
各軸アーム長(mm) 第1アーム 200 クリーン度 クラス3 (ISO14644-1)
第2アーム 250 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±137 保護等級 IP40
各軸動作範囲 第2アーム(度) ±137 耐振動・耐衝撃 衝撃・振動が加わらないこと
上下軸(mm) 180/330 騒音(注8) 80dB以下
回転軸(度) ±360 海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 600W
モーター容量 第2アーム 400W
上下軸 200W
回転軸 100W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 131,072 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.28秒 4軸仕様 0.12 kg・m2
連続サイクルタイム 0.51秒
スカラロボットの先端軸(回転軸)中心換算の慣性モーメント許容値です。先端軸中心か
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした らツール重心までのオフセット量は、以下の数値以内としてください。ツール重心位置
場合の所要時間を表します。 が先端軸中心位置を離れた場合は、速度・加速度を適宜落とす必要があります。負荷や
2kg 搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) 動作条件によって張出し長は制限されます。
【標準サイクルタイム】
最速動作の場合の所要時間です。一般に高速性能の目安となります。
最速動作での連続動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
先端軸
上下移動
負荷
重心
水平方向
水平方向 上下方向
180mm以下 100mm以下
■ 押付け力と電流制限値の相関図(参考値)
上 下軸の先端部の押付け力です。(注3)
160
140 135
120
100 100 110
80
65 75
60 50
40 40
20 25
0
0 10 20 30 40 50 60 70 80 90 100
押付け電流制限値(%)
IXA-4NSC4518/4NSC4533 8
押付け力(N)
上下方向
Page10
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティー比の目安グラフを参考に停止時間
を設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの、連続運転目安範囲の加減速度設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティー比の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合はできるだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、搬送質量は許容値以下としてください。
(7) 可搬質量は回転軸中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NSC45 PTP加減速度設定の目安 NSC45 PTP動作デューティー比設定の目安
100% 100%
8kg
90% 90%
g
80% 最大設定範囲 80% .5k
5
70% 70%
60% 60% 3kg
50% 50%
40% 40%
30% 連続運転目安範囲 30%
20% 20%
10% 10%
0% 0%
0 1 2 3 4 5 6 7 8 100% 80%75% 60% 40% 30% 20% 0%
搬送負荷質量(kg) デューティー比(%)
0 負荷慣性モーメント(kg・m2) 0.12
■ CP動作
水平 上下
NSC45 CP加減速度設定の目安 NSC45 CP加減速度設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
2.5G 3.0G
2.5G
2.0G
最大設定範囲 2.0G
1.5G
最大速度2000mm/s 最大設定範囲
1.5G
連続運転目安範囲
1.0G
1.0G 最大速度1600mm/s
0.8G
0.8G
連続運転目安範囲
0.5G
0.5G
0.0G 0.0G
0 1 2 3 4 5 5.5 6 7 8 0 2 4 6 8
搬送負荷質量(kg) 搬送負荷質量(kg)
0 負荷慣性モーメント(kg・m2) 0.12
NSC45 CP動作デューティー比設定の目安 NSC45 CP動作デューティー比設定の目安
上下軸(Z軸)なしの水平移動動作 上下軸(Z軸)のみの動作
2.5G 3.0G
2kg
3kg 2.5G
2.0G
5.5kg 2.0G
1.5G
5.5kg
1.5G
1.0G
8kg
0.8G 1.0G 8kg
0.8G
0.5G
0.5G
0.0G 0.0G
100% 80% 75% 60% 50% 40% 20% 0% 100% 80% 60% 40% 20% 0%
デューティー比(%) デューティー比(%)
9 IXA-4NSC4518/4NSC4533
加減速度(G) 加減速度(G) 加減速度(%)
加減速度(G) 加減速度(G) 加減速度(%)
Page11
お問合せは
0800-888-0088 IXA スカラロボット
■ CP動作 速度・加減速度制限
NSC45 上下軸(Z軸)動作なし水平移動動作 NSC45 上下軸(Z軸)動作のみの動作
2200 1800
2.0G 2.0G 2.5G 2.5G
2000 1600
1800
1400
1600
1200
1400
1300
1200 1000
0.8G
0.8G
1000 800
800
600
600
400
400
200 200
0 0
0 1 2 3 4 5 6 7 8 0 1 2 3 4 5 6 7 8
搬送負荷質量(kg) 搬送負荷質量(kg)
IXA-4NSC4518/4NSC4533 10
CP速度(mm/s)
CP速度(mm/s)
Page12
IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
■ IXA-4NSC4518
(注) ケーブル接続に関しては 19 ページ(注9)を参照ください。 ST:ストローク
ユーザー配線用D-subコネクター M.E.:メカニカルエンド
(9極、ソケット、固定具M2.6) 2-M5深さ8 60 2-M5深さ8 18 基準面 M4深さ8(アース接続用) S.E.:ストロークエンド
配線:24AWG、10芯(9芯+シールド) W
(コネクターフード付き)
2-M4深さ8
3-φ6エアチューブ 黒 Y Y
ワンタッチ継手 白 詳細図 K
赤
膜付グロメット 122.2 ベース取付け穴詳細
詳細図 W 85 K
22.5 125 φ20
ユーザーパネル詳細 170.5 φ11
257
(702.8)
51.8 450 (201)
250 200
断面図 Y-Y
(4箇所)
LED表示灯
(アンバー色)
S
ブレーキ解除スイッチ
X
吸引用配管継手
適用チューブ
外径φ12(内径φ8)
ブレーキケーブル接続
モーター・エンコーダーケーブル接続
M.E. (1軸目)
モーター・エンコーダーケーブル接続
原点 2525 (2軸目~4軸目)
P (100)
基準面 85 167.9 配線空間
着座面 (33.1)
φ45 S.E. 3-φ6エアチューブ
Q ワンタッチ継手
M.E.
Z Z ユーザー配線用D-subコネクター
(15極、プラグ、固定具M2.6)
0 h7 配線:24AWG、10芯(9芯+シールド)
φ2 赤 白 黒 (コネクターフード付き)
詳細図 P 10 + 0.
0 0 1 5 深さ6
φ6深座ぐり深さ1 (ベース着座面より)
(片面のみ) 断面図 Z-Z 詳細図 X (R)
85 背面パネル詳細
φ10 H7 + 0 .0 0 1 5 リーマー深さ6
3-M4深さ8
(反対側も同様) 詳細図 Q
ベース長穴詳細
詳細図 S
R4 0
50 71.5 R R45
1
R1 71.5
R200 R 200
250
R250 R
100 100
51.4° 51.4°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 33.0kg
11 IXA-4NSC4518/4NSC4533
61.5
137° 1010
19 619
174 92
146 34
5 180ST 6.3 147.6
93.6
40
44
130.5 85
40
137°
10 160 90
(100.6)
150 15
280.5 87 180
420.1
461
R25 505.5 (5.5)
0 137°
15 5
12
137
°
37°1
° 25
0
137 R
Page13
お問合せは
0800-888-0088 IXA スカラロボット
■ IXA-4NSC4533
(注) ケーブル接続に関しては1 9 ページ(注9)を参照ください。 ST:ストローク
ユーザー配線用D-subコネクター 2-M5深さ8 60 W 2-M5深さ8 18 基準面 M4深さ8(アース接続用) M.E.:メカニカルエンド
S.E.:ストロークエンド
(9極、ソケット、固定具M2.6)
配線:24AWG、10芯(9芯+シールド)
(コネクターフード付き) 2-M4深さ8
3-φ6エアチューブ 黒
ワンタッチ継手 白
赤 膜付グロメット 122.2 85 Y Y
22.5 125 K
170.5 詳細図 K
詳細図 W (702.8) 257 ベース取付け穴詳細
ユーザーパネル詳細 51.8 450 (201) φ20
250 200 φ11
断面図 Y-Y
(4箇所)
LED表示灯
(アンバー色)
S
ブレーキ解除スイッチ
X
吸引用配管継手適用チューブ
外径φ12(内径φ8)
ブレーキケーブル接続
M.E. モーター・エンコーダーケーブル接続
(1軸目)
原点 2525 モーター・エンコーダーケーブル接続
(100) (2軸目~4軸目)
P 基準面
85 167.9 配線空間
着座面 (33.1)
φ45 3-φ6エアチューブ
ワンタッチ継手
Z Z ユーザー配線用D-subコネクター
Q (15極、プラグ、固定具M2.6)
S.E. 配線:24AWG、10芯(9芯+シールド)
7 赤 白 黒 (コネクターフード付き)
0 h
詳細図 P φ2 M.E.
φ6深座ぐり深さ1 +0.015
(片面のみ) 詳細図 X 10 0 深さ6
断面図 Z-Z (ベース着座面より)
背面パネル詳細 (R)
85
3-M4深さ8 φ10 H7 + 0 . 0 1 50 リーマー深さ6
(反対側も同様)
詳細図 S 詳細図 Q
ベース長穴詳細
R4 0
5 5
0 71.5 R 4
R1 171 R
.5
0
R20 R 200
250
R250 R
100 100
51.4° 51.4°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 33.5kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
最大接続 制御方法
名称 外観 可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページ
DV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-RAX4/SAX4(IXA用) 4 三相AC200V - - ● ● ● ● ● - - - ● ● - - - 36666 - 総 合カタログ
(タイプにより異なります) 2021・7-291
(注) DV、CCなどのネットワーク略称記号については、総 合カタログ2021・7-17ペ ージをご確認ください。
IXA-4NSC4518/4NSC4533 12
47
1010
137°
19
770
174 92
296 34
5 330ST 6.3 147.6
93.6
40
44
130.5 85
40
137°
10 160 90
(100.6)
150 15
280.5 87 180
420.1
R 461250 137 505.5 (5.5)
°
12
15 5
°
137
°
137
37° R2
50
1
Page14
IXA-4NSC6018、IXA-4NSC6033
IXA スカラロボット
IXA-4NSC6018 アーム長
クリーン バッテリー
レスアブソ 600
IXA-4NSC6033 mm
■ 型式項目
I XA - 4 NSC 60 - - T 2
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー
4 4軸 NSC 高速タイプ クリーンルーム仕様 60 600mm 18 180mm N 無し T2 XSEL-RAX/SAX
33 330mm 5L 5m
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 8)は、 19 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量および移動距離、場所により最大設定
IXA-4NSC6018 - 値が変化します。また、最大設定値での連続動作を行うと過負荷エラー
IXA-4NSC6033 - が出る場合があります。連続動作を行う際は加減速値を下げるか、
選定上の デューティー比(目安)を参考にして加減速後に停止時間を設けてく
■ 別売オプション価格表(標準価格) 注意 ださい。
(3)スカラロボットは 100%の速度・加速度で連続運転は出来ません。
名称 型式 参照頁 標準価格 動作可能条件は「加減速度設定の目安」ページをご確認ください。
ユーザーケーブル CB-IXA-USR□□□-CS 20 -
フランジ IX-FL-1 20 - (4)クリーン度規格については、 19 ページをご参照ください。
(注) 別途ご注文ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 4軸仕様
標準タイプ 5L( 5m) -
10L( 10m) -
1L( 1m) ~ 4L( 4m) -
6L (6m) ~ 9 L (9m) -
11L( 11m) -
長さ指定 12L (12m) -
13L (13m) -
14L( 14m) -
15L (15m) -
(注) 下記ケーブルの合計金額となります。
[4軸仕様]モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
13 IXA-4NSC6018/4NSC6033
Page15
お問合せは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容
4軸仕様 項目 内容
4軸仕様
最大可搬質量(kg()注1) 10 位置繰返し精度 水平面内 ±0.01mm
合成最高速度(mm/s) 6414 上下軸 ±0.01mm
速度 第1アーム(度/s) 300 (注5) 回転軸 ±0.005度
(注2) 各軸最高速度 第2アーム(度/s) 750 ユーザー配線 10芯(9芯+シールド) AWG24(定格30V/MAX1A)
上下軸(mm/s) 1600 ユーザー配管 外径φ6 内径φ4 エアチューブ3本
回転軸(度/s) 2000 (最高使用圧力0.6MPa)
押付け(N()注3) 上限 135 LED表示灯(注6) アンバー色LED 小型表示灯1個 DC24V供給必要
下限 25 ブレーキ解除スイッチ(注7) 上下軸落下防止用ブレーキ解除スイッチ
クリーンルーム仕様(注4) 吸引量(NL/min) 50 許容トルク 3.2N・m
アーム長(mm) 600 先端軸 許容負荷モーメント 8.3N・m
各軸アーム長(mm) 第1アーム 350 クリーン度 クラス3 (ISO14644-1)
第2アーム 250 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±137 保護等級 IP40
各軸動作範囲 第2アーム(度) ±140 耐振動・耐衝撃 衝撃・振動が加わらないこと
上下軸(mm) 180/330 騒音(注8) 80dB以下
回転軸(度) ±360 海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 750W
モーター容量 第2アーム 400W
上下軸 200W
回転軸 100W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 131,072 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.27秒 4軸仕様 0.12 kg・m2
連続サイクルタイム 0.48秒
スカラロボットの先端軸(回転軸)中心換算の慣性モーメント許容値です。先端軸中心か
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした らツール重心までのオフセット量は、以下の数値以内としてください。ツール重心位置
場合の所要時間を表します。 が先端軸中心位置を離れた場合は、速度・加速度を適宜落とす必要があります。負荷や
2kg 搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) 動作条件によって張出し長は制限されます。
【標準サイクルタイム】
最速動作の場合の所要時間です。一般に高速性能の目安となります。
最速動作での連続動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
先端軸
上下移動
負荷
重心
水平方向
水平方向 上下方向
180mm以下 100mm以下
■ 押付け力と電流制限値の相関図(参考値)
上 下軸の先端部の押付け力です。(注3)
160
140 135
120
100 100 110
80
65 75
60 50
40 40
20 25
0
0 10 20 30 40 50 60 70 80 90 100
押付け電流制限値(%)
IXA-4NSC6018/4NSC6033 14
押付け力(N)
上下方向
Page16
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティー比の目安グラフを参考に停止時間
を設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの、連続運転目安範囲の加減速度設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティー比の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合はできるだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、搬送質量は許容値以下としてください。
(7) 可搬質量は回転軸中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NSC60 PTP加減速度設定の目安 NSC60 PTP動作デューティー比設定の目安
100% 100%
10kg
90% 最大設定範囲 90% 7.5kg
80% 80%
70% 70% 3kg
60% 60%
50% 50%
40% 40%
30% 連続運転目安範囲 30%
20% 20%
10% 10%
0% 0%
0 1 2 3 4 5 6 7 8 9 10 100% 80%75% 60% 50% 40% 20% 0%
搬送負荷質量(kg) デューティー比(%)
0 負荷慣性モーメント(kg・m2) 0.12
■ CP動作
水平 上下
NSC60 CP加減速度設定の目安 NSC60 CP加減速度設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
1.5G 2.0G
1.5G
1.0G
最大設定範囲
1.0G 連続運転目安範囲
最大設定範囲 最大速度1600mm/s
0.5G 連続運転目安範囲
最大速度2000mm/s 0.5G
0.2G
0.0G 0.0G
0 2 4 6 8 10 0 2 4 6 8 10
搬送負荷質量(kg) 搬送負荷質量(kg)
0 負荷慣性モーメント(kg・m2) 0.12
NSC60 CP動作デューティー比設定の目安 NSC60 CP動作デューティー比設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
1.5G 2.0G
4kg
1.5G
4kg
1.0G
8kg
1.0G
8kg
0.5G
10kg
0.5G
10kg
0.2G
0.0G 0.0G
100% 80% 60% 40% 20% 0% 100% 80% 60% 40% 20% 0%
デューティー比(%) デューティー比(%)
15 IXA-4NSC6018/4NSC6033
加減速度(G) 加減速度(G) 加減速度(%)
加減速度(G) 加減速度(G) 加減速度(%)
Page17
お問合せは
0800-888-0088 IXA スカラロボット
■ CP動作 速度・加減速度制限
NSC60 上下軸(Z軸)動作なし水平移動動作 NSC60 上下軸(Z軸)動作のみの動作
2200 1800
1.0G 1.0G 1.5G 1.5G
2000 1600
1800
1400
1600
1200
1400 0.5G
1250 1000 1.0G
1200
1000 0.2G
800 0.5G
800
600
600
400
400
200 200
0 0
0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10
搬送負荷質量(kg) 搬送負荷質量(kg)
IXA-4NSC6018/4NSC6033 16
CP速度(mm/s)
CP速度(mm/s)
Page18
IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
■ IXA-4NSC6018
(注) ケーブル接続に関しては 19 ページ(注9)を参照ください。 ST:ストローク
ユーザー配線用D-subコネクター M.E.:メカニカルエンド
(9極、ソケット、固定具M2.6) S.E.:ストロークエンド
配線:24AWG、10芯(9芯+シールド) 2-M5深さ8 60 2-M5深さ8 18 基準面 M4深さ8(アース接続用)
(コネクターフード付き) W
2-M4深さ8
3-φ6エアチューブ 黒
ワンタッチ継手 白 Y Y
赤
詳細図 K
膜付グロメット 122.2
詳細図 W 85 K ベース取付け穴詳細
22.5 125
ユーザーパネル詳細 170.5 φ20
257 φ11
(852.8)
51.8 600 (201)
250 350
断面図 Y-Y
(4箇所)
LED表示灯
(アンバー色)
S
ブレーキ解除スイッチ
X
吸引用配管継手適用チューブ
外径φ12(内径φ8)
ブレーキケーブル接続
M.E. モーター・エンコーダーケーブル接続
(1軸目)
原点 2525 モーター・エンコーダーケーブル接続
P (100) (2軸目~4軸目)
基準面 85 167.9 配線空間
着座面 (33.1)
φ45 S.E. 3-φ6エアチューブ
ワンタッチ継手
M.E.
Z Z Q ユーザー配線用D-subコネクター
(15極、プラグ、固定具M2.6)
h7 配線:24AWG、10芯(9芯+シールド)
φ20
赤 白 黒 (コネクターフード付き)
詳細図 P
φ6深座ぐり深さ1
(片面のみ) 断面図 Z-Z 10 + 0 .015
詳細図 X 0 深さ6
85 (ベース着座面より)
)
φ10 H7 + 00 . 0 1 5 リーマー深さ6 背面パネル詳細 (R
3-M4深さ8
(反対側も同様)
詳細図 S 詳細図 Q
ベース長穴詳細
R 5.7 R2
600 R22 25.7 R600
R350 R350
R25 250
0 R
100 100
76.7° 76.7°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 33.5kg
17 IXA-4NSC6018/4NSC6033
61.5
1010
137°
19
619
174 92
146 34
5 180ST 6.3 147.693.6
40
44
85
130.5
13 40
7°
R 250 90
1 10 160
40 (100.6)
°
294 73.5 150 15
420.1 180
461
505.5 (5.5)
12
15 5
37°1
37°1
R2 50
140°
Page19
お問合せは
0800-888-0088 IXA スカラロボット
■ IXA-4NSC6033
ST:ストローク
(注) ケーブル接続に関しては 19 ページ(注9)を参照ください。 M.E.:メカニカルエンド
S.E.:ストロークエンド
ユーザー配線用D-subコネクター 2-M5深さ8 60 2-M5深さ8 18 基準面 M4深さ8(アース接続用)
(9極、ソケット、固定具M2.6) W
配線:24AWG、10芯(9芯+シールド)
(コネクターフード付き) 2-M4深さ8
3-φ6エアチューブ Y Y
黒
ワンタッチ継手 詳細図 K
白
赤 膜付グロメット 122.2 ベース取付け穴詳細
85
22.5 125 K
詳細図 W 170.5 φ20
φ11
ユーザーパネル詳細 (852.8) 257
51.8 600 (201)
250 350
断面図 Y-Y
(4箇所)
LED表示灯
(アンバー色)
S
ブレーキ解除スイッチ
X
吸引用配管継手
適用チューブ
外径φ12(内径φ8)
ブレーキケーブル接続
M.E. モーター・エンコーダーケーブル接続
(1軸目)
原点 2525 モーター・エンコーダーケーブル接続
(2軸目~4軸目)
P 基準面 (100)
85 167.9 配線空間
着座面 (33.1)
φ45 3-φ6エアチューブ
ワンタッチ継手
Z Z ユーザー配線用D-subコネクター
(15極、プラグ、固定具M2.6)
Q 配線:24AWG、10芯(9芯+シールド)
S.E. 赤 白 黒 (コネクターフード付き)
詳細図 P M.E.
φ6深座ぐり深さ1 0h7
(片面のみ) φ2 10深さ6
詳細図 X (ベース着座面より)
R)
背面パネル詳細 (
3-M4深さ8
(反対側も同様) 断面図 Z-Z 85
φ10 H7 + 00 .0 1 5 リーマー深さ6
詳細図 S 詳細図 Q
ベース長穴詳細
R
R 2
6 2
0 225.7 5
0 R .7 R600
R350 R350
R250 R250
100 100
76.7° 76.7°
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 34.0kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
名称 外観 最大接続 制御方法
可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページ
DV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-RAX4/SAX4(IXA用) 4 三相AC200V - - ● ● ● ● ● - - - ● ● - - - 36666
(タイプにより異なります) - 総合カタログ
2021・7-291
(注) DV、CCなどのネットワーク略称記号については、総 合カタログ2021・7-17ペ ージをご確認ください。
IXA-4NSC6018/4NSC6033 18
47
1010
137°
770
19 174 92
296 34
5 330ST 6.3 147.693.6
40
44
85
130.5
40
137°
R 250 90
10 160
1 (100.6)
40° 294 73.5 150 15
420.1 180
461
505.5 (5.5)
12
15 5
37°1
°
137
R2 50
140°
Page20
注意事項
注意事項
注意事項
(注1) 可搬質量は搬送可能な最大質量になります。
プログラム上で負荷の質量、慣性モーメントを設定することで、自動で最適な加速度が設定されます。
可搬質量 負荷質量が大きくなるほど、加速度が落ちる設定となります。
(注2) スペックの最大動作速度の数値は、PTP命令動作の場合です。
CP動作命令(補間動作)の場合は、高速での動きには限界がありますのでご注意ください。
PTP動作時
最大動作速度
(注3) 上下軸押付け力制御範囲は、上下軸先端部の押付力です。
上下軸に何も取付けられていない無負荷時の押す力となります。
上下軸 連続押付けは出来ません。
押付け力制御範囲 上限は押付け力の設定値が70%の場合の押付け力です。
下限は設定値が20%の場合の押付け力です。
実際の押付け力は多少の誤差を生じます。
(注4) クリーンクラス3で使用するためには、本体ベースのエア吸引口より、本体内のエアを吸引する必要があ
ります。吸引量は各仕様の流量を流せる配管をご使用ください。また、動作パターンや速度、加減速度によ
本体内部エア吸引量 りロボット内部の負圧は変わります。上下軸が動作していない状態で3~10kPa程、上下軸が動作して
いる状態でも、負圧の状態を確保してください。
(注5) 動作開始ポジションと位置決めポジションの2点間において、同じ速度、加減速度、腕系で繰返し動作さ
せた時の位置決めの再現性を表します(JIS B 8432_周囲温度20℃一定時の値です)。絶対位置決め精
位置繰返し精度 度ではありませんのでご注意ください。また腕系を切り替えた場合や、異なる複数のポジションから位置
決めポジションに位置決めした場合、動作速度、加減速度設定などの運転条件を変化させた場合は、位置
繰返し精度の仕様値を外れる場合がありますのでご注意ください。
(注6) LED表示灯は第1軸(J1)カバー上部に設置されています。
コントローラーがエラーを発生した場合などに点灯させることがでます。
LED表示灯 使用する場合はお客様がコントローラーのI/O出力の信号を使って、ユーザー配線内にあるLED端子に
DC24Vを加える回路を組むことにより動作します。
(注7) ブレーキ解除スイッチは第1軸(J1)ベース背面に設置されています。
ブレーキの解除を行うには、ブレーキ解除スイッチの使用・不使用にかかわらず、
ブレーキ解除 コントローラーへのDC24V電源の供給が必要です。
スイッチ
(注8) 全軸が最大速度で動作した時の測定値です。
騒音は、動作条件及び周囲反射環境により変わる場合があります。
騒音 (JIS B 6195)
動作範囲 腕系切替えの際はいったんアームが直線上に伸びますので、周辺機器との干渉にご注意ください。
(注9) モーターケーブル、エンコーダーケーブル、ブレーキケーブルの接続は下記のとおりとなります。
ケーブル ブレーキケーブル(最長15m)
第2アーム/上下軸/回転軸
モーターケーブル、エンコーダーケーブル
(最長15m)
コントローラーへ
接続
第1アーム
モーターケーブル、エンコーダーケーブル
(最長15m)
300mm
19 注意事項