




CRSシリーズは、直交3軸と回転3軸を組合わせた6自由度ロボットです。
回転、旋回を含めた自由度の高い動作が可能です。
<主な特長>
①多彩な組合わせバリエーションをご用意。
②X軸、Y軸、Z軸は、1軸ごとでストロークの選択が可能。
③シミュレーションソフトを使ってPC上でロボットの動きを確認できます。
④バッテリーレスアブソリュートエンコーダー標準搭載。
関連メディア
このカタログについて
| ドキュメント名 | 直交型6軸ロボットCRSシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 8.8Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社アイエイアイ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
表紙
カタログ番号 CJ0274-1A(2020年6月)
直交型 6軸ロボット CRS
安心とは24時間対応のことです
本 社 〒424-0103 静岡県静岡市清水区尾羽577-1 TEL 054-364-5105 FAX 054-364-2589
東 京 営 業 所 〒105-0014 東京都港区芝3-24-7 芝エクセージビルディング4F TEL 03-5419-1601 FAX 03-3455-5707
大 阪 営 業 所 〒530-0005 大阪市北区中之島6-2-40 中之島インテス14F TEL 06-6479-0331 FAX 06-6479-0236
名 古 屋 支 店
名 古 屋 営 業 所 〒460-0008 愛知県名古屋市中区栄5-28-12 名古屋若宮ビル8F TEL 052-269-2931 FAX 052-269-2933
小 牧 営 業 所 〒485-0029 愛知県小牧市中央1-271 大垣共立銀行 小牧支店ビル6F TEL 0568-73-5209 FAX 0568-73-5219
四日市 営 業 所 〒510-0086 三重県四日市市諏訪栄町1-12 朝日生命四日市ビル6F TEL 059-356-2246 FAX 059-356-2248
豊 田 支 店
新 豊 田 営 業 所 〒471-0034 愛知県豊田市小坂本町1-5-3 朝日生命新豊田ビル4F TEL 0565-36-5115 FAX 0565-36-5116
安 城 営 業 所 〒446-0056 愛知県安城市三河安城町1-9-2 第二東祥ビル3F TEL 0566-71-1888 FAX 0566-71-1877
盛 岡 営 業 所 〒020-0062 岩手県盛岡市長田町6-7 クリエ21ビル7F TEL 019-623-9700 FAX 019-623-9701
仙 台 営 業 所 〒980-0011 宮城県仙台市青葉区上杉1-6-6 イースタンビル7F TEL 022-723-2031 FAX 022-723-2032
新 潟 営 業 所 〒940-0082 新潟県長岡市千歳3-5-17 センザイビル2F TEL 0258-31-8320 FAX 0258-31-8321
宇 都 宮 営 業 所 〒321-0953 栃木県宇都宮市東宿郷5-1-16 ルーセントビル3F TEL 028-614-3651 FAX 028-614-3653
熊 谷 営 業 所 〒360-0847 埼玉県熊谷市籠原南1-312 あかりビル5F TEL 048-530-6555 FAX 048-530-6556
茨 城 営 業 所 〒300-1207 茨城県牛久市ひたち野東5-3-2 ひたち野うしく池田ビル2F TEL 029-830-8312 FAX 029-830-8313
多 摩 営 業 所 〒190-0023 東京都立川市柴崎町3-14-2 BOSENビル2F TEL 042-522-9881 FAX 042-522-9882
甲 府 営 業 所 〒400-0031 山梨県甲府市丸の内2-12-1 ミサトビル3F TEL 055-230-2626 FAX 055-230-2636
厚 木 営 業 所 〒243-0014 神奈川県厚木市旭町1-10-6 シャンロック石井ビル3F TEL 046-226-7131 FAX 046-226-7133
長 野 営 業 所 〒390-0852 長野県松本市島立943 ハーモネートビル401 TEL 0263-40-3710 FAX 0263-40-3715
静 岡 営 業 所 〒424-0103 静岡県静岡市清水区尾羽577-1 TEL 054-364-6293 FAX 054-364-2589
浜 松 営 業 所 〒430-0936 静岡県浜松市中区大工町125 シャンソンビル浜松7F TEL 053-459-1780 FAX 053-458-1318
金 沢 営 業 所 〒920-0024 石川県金沢市西念3-1-32 西清ビルA棟2F TEL 076-234-3116 FAX 076-234-3107
滋 賀 営 業 所 〒524-0033 滋賀県守山市浮気町300-21 第2小島ビル2F TEL 077-514-2777 FAX 077-514-2778
京 都 営 業 所 〒612-8418 京都府京都市伏見区竹田向代町12 TEL 075-693-8211 FAX 075-693-8233
兵 庫 営 業 所 〒673-0898 兵庫県明石市樽屋町8-34 甲南アセット明石第二ビル8F TEL 078-913-6333 FAX 078-913-6339
岡 山 営 業 所 〒700-0973 岡山県岡山市北区下中野311-114 OMOTO-ROOT BLD.101 TEL 086-805-2611 FAX 086-244-6767
広 島 営 業 所 〒730-0051 広島県広島市中区大手町3-1-9 広島鯉城通りビル5F TEL 082-544-1750 FAX 082-544-1751
松 山 営 業 所 〒790-0905 愛媛県松山市樽味4-9-22 フォーレスト21 1F TEL 089-986-8562 FAX 089-986-8563
福 岡 営 業 所 〒812-0013 福岡県福岡市博多区博多駅東3-13-21 エフビルWING7F TEL 092-415-4466 FAX 092-415-4467
大 分 出 張 所 〒870-0823 大分県大分市東大道1-11-1 タンネンバウムⅢ 2F TEL 097-543-7745 FAX 097-543-7746
熊 本 営 業 所 〒862-0954 熊本県熊本市中央区神水1-38-33 幸山ビル1F TEL 096-386-5210 FAX 096-386-5112
USA Headquarter & Western Region (Los Angeles) : 2690 W. 237th Street, Torrance, CA 90505 (800) 736-1712
Midwest Branch Office (Chicago) : 110 E. State Pkwy, Schaumburg, IL 60173 (800) 944-0333
Southeast Branch Office (Atlanta) : 1220 Kennestone Circle, Suite 108, Marietta, GA 30066 (888) 354-9470
825 PhairojKijja Tower 7th FL, Debaratana RD.,
Bangna Nuea, Bangna, Bangkok 10260, Thailand
当カタログに記載されている内容は、製品改良のため予告なしに変更することがあります。
ロボシリンダ/ロボシリンダー/ROBOCYLINDER/エレシリンダ/エレシリンダー/ELECYLINDER/ラジアルシリンダ/ラジアルシリンダー/RADIAL CYLINDER/
パワーコン/パワーコンスカラは株式会社アイエイアイの登録商標です。
Page2
特長
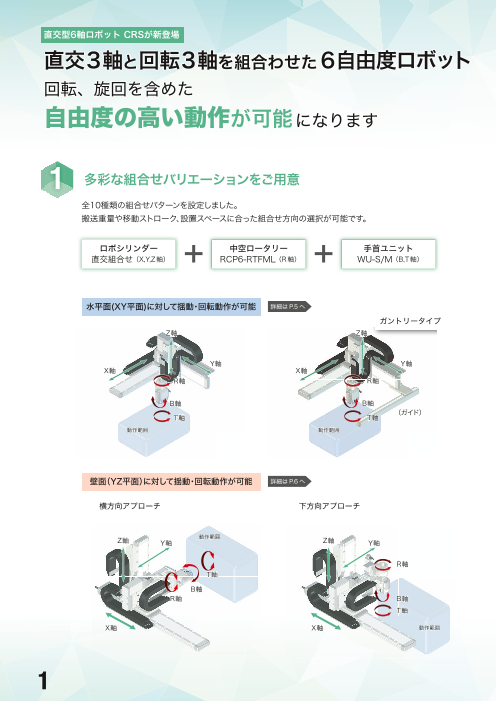
直交型6軸ロボット CRSが新登場
直交3軸と回転3軸を組合わせた6自由度ロボット
回転、旋回を含めた
自由度の高い動作が可能になります
1 多彩な組合せバリエーションをご用意
全10種類の組合せパターンを設定しました。
搬送重量や移動ストローク、設置スペースに合った組合せ方向の選択が可能です。
ロボシリンダー + 中空ロータリー 手首ユニット直交組合せ( X,Y,Z軸) RCP6-RTFML( R軸) + WU-S/M( B,T軸)
水平面(XY平面)に対して揺動・回転動作が可能 詳細はP.5へ
ガントリータイプ
Z軸 Z軸
Y軸 Y軸
X軸 X軸
R軸 R軸
B軸 B軸
(ガイド)
T軸 T軸
動作範囲 動作範囲
壁面(YZ平面)に対して揺動・回転動作が可能 詳細はP.6へ
横方向アプローチ 下方向アプローチ
Z軸 動作範囲Y軸 Z軸 Y軸
R軸
T軸
B軸
R軸 B軸
T軸
X軸 X軸 動作範囲
1
Page3
直交3軸と回転3軸を組合わせた6自由度ロボット
回転、旋回を含めた 2 X軸、Y軸、Z軸は、1軸ごとでストロークの選択が可能
自由度の高い動作が可能になります 各軸ごとに設定ができるため、最適サイズの選択が可能です。また、ストローク長による価格アップが少ないです。
(例)CRS-XBAのX軸のみを200mmから800mmに変更
ストローク XYZ:200mm ×300mm×190mm ストローク XYZ:800mm ×300mm×190mm
Z軸
X軸 Y軸
動作範囲
動作範囲
+¥18,000
(アクチュエーターのみ) (アクチュエーターのみ)
3 シミュレーションソフト パソコン専用ティーチングソフトの対応バージョンはホームページをご確認ください。
直交型6軸ロボット本体が無くても、XSEL用パソコン専用ティーチングソフトを使用して、ロボットの動きを
確認できます。
さらに、サイクルタイムの計算もできます。
サイクルタイム表示
ロボット先端の軌跡を
アニメーション表示する
こともできます。
4 バッテリーレスアブソリュートエンコーダー標準搭載
2
Page4
アプリケーション
アプリケーション
ギヤの洗浄機用ローダー・アンローダーと外観検査装置
加工されたギヤを洗浄し、外観検査を行う装置です。
直交型6軸ロボット (CRS-XZDY) を使用し、
洗浄機への投入と洗浄後の取出し、3方向からの外観検査を行います。
外観検査工程
洗浄工程
直交型6軸ロボット
CRS-XZDY
(X軸:800mm、Z軸:300mm、Y軸:500mm)
※先端のグリッパーは、CRSの付属品ではありません。
3
Page5
洗浄機への投入と洗浄後の取出し
前工程から流れてきたギヤを洗浄機へ投入します。
洗浄後のギヤを取出し、外観検査工程へ移載します。
外観検査
1
右図のように3方向から検査を行うため、
検査用カメラの前でギヤの向きを変えます。
2 3
1 2 3
ロータリータイプ(EC-RTC)で
ギヤを反転しています。
パレットへの収納
検査が終了したギヤをパレットへ収納します。
4
Page6
ラインナップ一覧
ラインナップ一覧
ピック & プレース
エリア内で立体的な動作が可能 組立、検査工程にオススメ
■ XYB(Y 軸ベース固定)+Z 軸ベース固定タイプ
■ XYG(ガントリー Y 軸横立て)+Z 軸ベース固定タイプ
Y軸ロングストローク
ガントリー組合せ
型式:CRS-XBA 型式:CRS-XGA
最大可動範囲
X軸 Y軸 Z軸
最大可動範囲 X軸 Y軸 Z軸800mm 300mm 190mm 800mm 600mm 190mm
最大可搬質量 1 kg 最大可搬質量 1 kg
標準サイクルタイム 2.07 秒 標準サイクルタイム 2.11 秒
位置繰返し精度 ± 0.03 mm 位置繰返し精度 ± 0.03 mm
X軸ロング
ストローク
高速・高可搬
P.15 P.23
型式:CRS-XBB 型式:CRS-XGB
最大可動範囲
X軸 Y軸 Z軸
最大可動範囲 X軸 Y軸
Z軸
1100mm 300mm 200mm 1100mm 600mm 200mm
最大可搬質量 2 kg 最大可搬質量 2 kg
標準サイクルタイム 1.66 秒 標準サイクルタイム 1.66 秒
位置繰返し精度 ± 0.03 mm 位置繰返し精度 ± 0.04 mm
P.19 P.27
※標準サイクルタイム
標準サイクルタイムは下記条件で、往復の最速動作をした場合の動作時間です。
ストロークや動作パターンにより、記載のサイクルタイムより長くなる場合があります。
水平移動 300 mm
垂直移動
25 mm
※最大可搬質量
最大可搬質量は、ワークやツールの重心位置などにより小さくなることがあります。
5
Page7
離れた領域へのアプローチが可能 ローダー・アンローダーにオススメ
■ XZ(Z 軸直立固定)+Y 軸ラジアルシリンダータイプ
■ XZ(Z 軸直立固定)+Y 軸スライダータイプ
横方向アプローチ 下方向アプローチ
型式:CRS-XZCY 型式:CRS-XZCZ
最大可動範囲
X軸 Z軸 Y軸 X軸 Z軸 Y軸
800mm 300mm 200mm 最大可動範囲 800mm 300mm 200mm
最大可搬質量 1 kg 最大可搬質量 1 kg
標準サイクルタイム 2.55 秒 標準サイクルタイム 2.55 秒
位置繰返し精度 ± 0.06 mm 位置繰返し精度 ± 0.06 mm
Y軸ロング
ストローク
P.31 P.35
型式:CRS-XZDY 型式:CRS-XZDZ
最大可動範囲
X軸 Z軸 Y軸
800mm 300mm 500mm 最大可動範囲
X軸 Z軸 Y軸
800mm 300mm 500mm
最大可搬質量 1 kg 最大可搬質量 1 kg
標準サイクルタイム 2.28 秒 標準サイクルタイム 2.28 秒
位置繰返し精度 ± 0.03mm 位置繰返し精度 ± 0.03mm
高速
P.39 P.43
型式:CRS-XZEY 型式:CRS-XZEZ
最大可動範囲
X軸 Z軸 Y軸
800mm 300mm 500mm 最大可動範囲
X軸 Z軸 Y軸
800mm 300mm 500mm
最大可搬質量 1 kg 最大可搬質量 1 kg
標準サイクルタイム 1.69 秒 標準サイクルタイム 1.69 秒
位置繰返し精度 ± 0.03mm 位置繰返し精度 ± 0.03mm
P.47 P.51
6
Page8
型式項目
型 式項目
構成タイプは、5 ~ 6ページのラインナップ一覧をご確認ください。
ケーブルベアのサイズは、各製品ページの寸法表でご確認ください。
第1配線 第2配線 第3配線
1軸目 X軸 2軸目Y軸 3軸目Z軸 (X軸横) (Y軸横) (Z軸横)
CRS - - WA - - - B - R1 - - - - -
シリーズ タイプ 組合せ方向 エンコーダー ストロークオプション ストローク ストローク オプション 適応 ケーブル長 ケーブルベア オプション
ブレーキ コントローラー
XBA <XBA/XGA> <XBA/XBB>
XBB 5ページ 5 50mm 5 50mm R1 RSELユニット
XGA ラインナップ一覧参照
XGB 80 800mm 30 300mm
(50mm毎) (50mm毎) 1L 1m
<XBB/XGB> <XGA/XGB>
3L 3m
5 50mm 35 350mm
5L 5m
1
□L 長さ指定
3
製品仕様ページ参照
110 1100mm 60 600mm ※最大15mです。
(50mm毎) (50mm毎)
N ケーブルベアなし
WA バッテリーレスアブソ CT ケーブルベアSサイズ
<XBA/XGA> CTM ケーブルベアMサイズ
無記入 標準(ストレート) 9 90mm CTL ケーブルベアLサイズ
CJT(※) ケーブル取出し方向(上側) CTXL ケーブルベアXLサイズ
CJR(※) ケーブル取出し方向(右側) 19 190mm ※機種により選択できるサイズが異なります。
CJL(※) ケーブル取出し方向(左側) (50mm毎)
CJB(※) ケーブル取出し方向(下側)
<XBB/XGB>
※ XBB、XGBタイプは、必ずどれかの
記号を選択してください。 10 100mm 4B R軸 ブレーキ
5VC 手首ユニット エア継手付き
20 200mm 5WCS 手首ユニット 配線カラー付き
(50mm毎)
第1配線 第2配線 第3配線
1軸目 X軸 2軸目 Z軸 3軸目 Y軸 (X軸横) (Z軸横) (Y軸横)
CRS - - WA - - B - - R1 - - - - -
シリーズ タイプ 組合せ方向 エンコーダー ストロークオプション ストローク オプション ストローク 適応 ケーブル長 ケーブルベア オプション
ブレーキ コントローラー
XZCY 15 150mm 5 50mm R1 RSELユニット
XZCZ
XZDY 6ページ 80 800mm 30 300mm
XZDZ ラインナップ一覧参照 (50mm毎) (50mm毎) 1L 1m
XZEY 3L 3m
XZEZ 5L 5m
□L 長さ指定
※最大15mです。
<XZCY/XZCZ>
1 製品仕様ページ参照 無記入 標準(ストレート) 10 100mm
CJT(※) ケーブル取出し方向(上側) N ケーブルベアなし
CJR(※) ケーブル取出し方向(右側) 20 200mm CT ケーブルベアSサイズ
CJL(※) ケーブル取出し方向(左側) (50mm毎) CTM ケーブルベアMサイズ
CJB(※) ケーブル取出し方向(下側) CTL ケーブルベアLサイズ
WA バッテリーレスアブソ <XZDY/XZDZ/XZEY/XZEZ>※X ZEタイプは、必ずどれかの記号を CTXL ケーブルベアXLサイズ
選択してください。 25 250mm ※機種により選択できるサイズが異なります。
50 500mm
(50mm毎)
4B R軸 ブレーキ
5VC 手首ユニット エア継手付き
5WCS 手首ユニット 配線カラー付き
7
~ ~ ~
~ ~ ~
~ ~ ~ ~ ~ ~ ~
~ ~ ~ ~ ~ ~ ~
Page9
オプション
オプション
X軸ケーブル取出し方向変更
型 式 CJT / CJR / CJL / CJB
説 明 アクチュエーター本体に装着するモーター・エンコーダーケーブルの取付方向を上下左右に変更することが出来ます。
方向は、各アクチュエーターページの寸法図でご確認ください。
R軸ブレーキ
型 式 4B
説 明 停電やサーボOFFの時に、出力軸が動かないように保持します。
出力軸横向きで使用する際には、出力軸の回転によるワークなどの落下を防ぐことができます。
(Z軸、手首ユニットBT軸は標準でブレーキ付きです。)
手首ユニットエア継手付き
型 式 5VC
説 明 手首ユニットに真空パッド等のエア機器を接続する場合のエア継手(Φ6)を本体側面に付けるオプションです。アクチュエーターケーブ
ルの取出し側と同じ面に取り付きます。
手首ユニット配線カラー付き
型 式 5WCS
説 明 電動グリッパーなどを使用する場合、手首ユニットの
配線カラーを利用すると配線の取り回しが容易にな
ります。
配線カラーは配線金具(お客様にて用意)を取り付け
る基部として使用してください。
ボルト※
配線金具※ 配線押え金具※
ツール用配線※
配線カラー
ツール※
(電動グリッパーなど) ※お客様にてご用意ください
8
Page10
機種選定の流れ
CRS 直交型6軸ロボット
技術資料
機種選定の流れ
手順1~4に沿って、確認を行ってください。
手順 1
搬送物質量の確認
手首ユニットに取り付ける搬送物質量を計算し、最大可搬質量以下であることを確認してください。
搬送物質量 ≦ 最大可搬質量
ツール
ワーク
タイプ 搭載機種 最大可搬質量 タイプ 搭載機種 最大可搬質量
CRS-XBA WU-S 1kg CRS-XZCY
CRS-XBB WU-M 2kg CRS-XZCZ
CRS-XGA WU-S 1kg CRS-XZDY
WU-S 1kg
CRS-XGB WU-M 2kg CRS-XZDZ
CRS-XZEY
CRS-XZEZ
手順 2
慣性モーメントの確認
B軸、T軸へ負荷トルクがかかる場合、その分だけ手首ユニットの許容慣性モーメントが低下します。
まず、負荷トルクの計算を行い、補正許容慣性モーメントを求めてください。
【B軸】 【T軸】 B軸、T軸への「負荷トルク」の有無を確認
「有」の場合
B軸、T軸にかかる ≦ 小型タイプ・中型タイプの慣性モーメント 各補正許容慣性モーメント※
※速度と加減速度により変化します。
「無」の場合
B軸、T軸にかかる ≦ 小型タイプ・中型タイプの
「代表的形状の慣性モーメントの算出方法」を 慣性モーメント 各許容慣性モーメント
※
12ページに掲載しています。 ※速度と加減速度により変化します。
■負荷トルクを受ける条件
負荷トルクの有無
① ② ③ ④ ⑤
設置姿勢
オフセット
重力 重力 重力
重力 重力
オフセット
B軸 有り 有り 無し 有り 有り
T軸 無し 有り 無し 無し 有り
9
Page11
お問合せは
0800-888-0088 CRS 直交型6軸ロボット
■ 負荷トルク「有」の場合
負荷トルク「有」
B軸、T軸にかかる < 小型タイプ・中型タイプの慣性モーメント 各補正許容慣性モーメント※
※速度と加減速度により変化します。
(1)負荷トルクTlの計算
B軸の場合 Tl=TlT+TlW TIT:ツールの重量による負荷トルク[N・m]
=mT・g(r +r )×10-3+m ・g(r +r )×10-30 CT W 0 CW TIW:ワークの重量による負荷トルク[N・m]
m :ツールの質量[kg]
ツールの重心 ワークの重心 TmW:ワークの質量[kg]
TlT g:重力加速度[m/s2]
(負荷トルク)
T r0:取付面距離[mm]lW
(負荷トルク) rCT:ツール重心の位置[mm]
rCW:ワーク重心の位置[mm]
rCT 重力方向
r0 rCW
T軸の場合 TI=m・g・rC×10-3 TI:搬送物による負荷トルク[N・m]
T(I 負荷トルク) m:搬送物の重量[kg]
搬送物の重心 g:重力加速度[m/s
2]
rC:搬送物重心の距離[mm]
重力方向
rC
(2)許容慣性モーメント補正係数Cjの計算
T :出力トルク(右表) [Nm]
■速度別出力トルク[Nm]
C= Tmax-Tl maxj T TI:負荷トルク(1)の計算結果 WU-S:小型タイプ WU-M:中型タイプmax
速度 速度
度/s B軸 T軸 度/s B軸 T軸
0 0.65 0.65 0 1.65 1.65
150 0.65 0.65 150 1.65 1.65
300 0.62 0.62 300 1.65 1.65
450 0.6 0.6 450 1.65 1.65
600 0.58 0.58 600 1.58 1.58
750 0.52 0.52 750 1.36 1.36
900 0.45 0.45 900 1.14 1.14
1050 0.45 0.45 1050 0.96 0.96
1200 0.45 0.45 1200 0.79 0.79
(3)補正許容慣性モーメントJtlの計算
J =J C( kgm2)
■速度・加速度別許容慣性モーメント[kgm2]
tl max j
WU-S:小型タイプ WU-M:中型タイプ
B軸 T軸 B軸 T軸
Jmax:許容慣性モーメント(右表)[kgm2]
速度 加減速度 速度 加減速度
Cj:許容慣性モーメント補正係数 (2)の計算結果 度/s 0.3G 0.3G 度/s 0.3G 0.3G
0 0.008 0.0035 0 0.0150 0.0126
150 0.008 0.0035 150 0.0150 0.0126
300 0.008 0.0035 300 0.0118 0.0072
450 0.008 0.0035 450 0.0055 0.0054
600 0.008 0.0035 600 0.0055 0.0054
750 0.0035 750 0.0054
900 0.0035 900 0.0036
1050 0.0035 1050 0.0036
1200 0.0025 1200 0.0036
(4)搬送物慣性モーメントの確認
代表的な形状の慣性モーメント算出式(12ページ)にて、ご使用に
なるツールとワークの慣性モーメントを算出し、(3)で求めた補正許
ポイント
容慣性モーメント以下(4)≦(3)であることを確認してください。 ツールやワークなど、搬送物の形状は単純化して考えることで簡単に計算ができます。
10
Page12
CRS 直交型6軸ロボット
■ 負荷トルク「無」の場合
負荷トルク「無」
B軸、T軸にかかる < 小型タイプ・中型タイプの慣性モーメント 各許容慣性モーメント※
※速度と加減速度により変化します。
■速度・加速度別許容慣性モーメント[kgm2]
WU-S:小型タイプ WU-M:中型タイプ
速度
B軸 T軸
加減速度
速度
B軸 T軸
加減速度
度 /s 0.3G 0.7G 0.3G 0.7G 度 /s 0.3G 0.7G 0.3G 0.7G
0 0.0085 0.0065 0.0075 0.0035 0 0.015 0.0145 0.0165 0.0126
150 0.0085 0.0065 0.0075 0.0035 150 0.015 0.0145 0.0165 0.0126
300 0.0085 0.005 0.0065 0.0035 300 0.015 0.0127 0.0165 0.009
450 0.0085 0.005 0.0065 0.0025 450 0.0099 0.0045 0.0126 0.0063
600 0.0085 0.005 0.0065 0.0025 600 0.009 0.0036 0.0108 0.0054
750 0.005 0.0065 0.0025 750 0.0036 0.0099 0.0054
900 0.0065 0.0025 900 0.0036 0.0099 0.0045
1050 0.0065 0.0025 1050 0.0081 0.0045
1200 0.0065 0.0025 1200 0.0081 0.0045
(単位はkg・m2) (単位はkg・m2)
負荷トルクを受けない場合、代表的な形状の慣性モーメント算出式(12ページ)にて、ご使用になるツールとワークの慣性モーメントを
算出し、許容慣性モーメント以下であることを確認してください。
手順 3
動的スラスト荷重の確認
スラスト荷重(取付面に対して垂直方向の荷重)が動的許容スラスト荷重以下であることを確認してください。
a:移動加速度 動的スラスト荷重:F ≦ 動的許容スラスト荷重
重力方向
F=(mT+mW)・(a+g)・9.8[N] mT:ツールの質量[kg]
■動的許容スラスト荷重
mW:ワークの質量[kg] 許容スラスト荷重
g:重力加速度 1.0[G] WU-S:小型タイプ 330N
a:移動加速度[G] WU-M:中型タイプ 450N
11
Page13
お問合せは
0800-888-0088 CRS 直交型6軸ロボット
手順 4
動的負荷モーメントの確認
負荷モーメントが動的許容モーメント以下であることを確認してください。
動的負荷モーメント:M ≦ 動的許容負荷モーメント
M=m・a・9.8(L +r )×10-3T 0 CT +mW・a・9.8(L0+r )×10-3CW [Nm]
rcw m :ツールの質量[kg]
■動的許容負荷モーメント
T
L0 rct mW:ワークの質量[kg] 動的許容負荷モーメント
a:移動加速度[G] WU-S:小型タイプ 1.4Nm
L0:負荷モーメント基準位置 WU-M:中型タイプ 4.2Nm
WU-S(小型) 17.5[mm]
WU-M(中型) 21.5[mm]
rCT:ツール重心の位置[mm]
rCW:ワーク重心の位置[mm]
a:移動加速度 重力方向 ここまでの手順1~4で条件確認は完了です。
代表的形状の慣性モーメント算出方法
1. 回転軸が物体の中心を通る場合 2. 物体の中心が回転軸からオフセットしている場合
(1)円柱の慣性モーメント1 (4)円柱の慣性モーメント3
※円 柱の高さに関わらず(円板でも)、 ※ 円柱の高さに関わらず(円板でも)、
同一の式を適用可 同一の式を適用可
〈計算式〉J=M×(D×10-3)2/8 〈計算式〉J=M×(D×10-3)2/8+M×(L×10-3)2
D
円柱の慣性モーメント:J(kg・m2) 円柱の慣性モーメント:J(kg・m2) D
円柱の質量:M(単位kg) 円柱の質量:M(kg)
円柱の直径:D(mm) 円柱の直径:D(mm)
回転軸から中心までの距離:L(mm) L
(2)円柱の慣性モーメント2
(5)円柱の慣性モーメント4
〈計算式〉J=M×((D×10-3)2/4+(H×10-3)2/3)/4
〈計算式〉J=M×((D×10-3)2/4+(H×10-3)2/3)/4+M×(L×10-3)2
円柱の慣性モーメント:J(kg・m2)
円柱の質量:M(kg) 円柱の慣性モーメント:J(kg・m2)
円柱の直径:D(mm) 円柱の質量:M(kg)
円柱の長さ:H(mm) H/2 円柱の直径:D(mm)
円柱の長さ:H(mm)
H L回転軸から中心までの距離:L(mm)
H
(3)角柱の慣性モーメント1
※角 柱の高さに関わらず(四方板でも)、 (6)角柱の慣性モーメント2
同一の式を適用可 ※角 柱の高さに関わらず(四方形の板)、
同一の式を適用可
〈計算式〉J=M×((A×10-3)2+(B×10-3)2)/12
〈計算式〉J=M×((A×10-3)2+(B×10-3)2)/12+M×(L×10-3)2
角柱の慣性モーメント:J(kg・m2)
角柱の1辺:A(mm) 角柱の慣性モーメント:J(kg・m2)
角柱の1辺:B(mm) 角柱の質量:M(kg)
A/2 角柱の1辺:A(mm) L
角柱の1辺:B(mm)
A 回転軸から中心までの距離:L(mm) A
12
D
B
B D
Page14
デューティーについて
CRS 直交型6軸ロボット
デューティーについて
デューティー比とはアクチュエーターの稼働率(1サイクル中アクチュエーター
【デューティー比】
が動作している時間)をあらわします。 デューティー比とは、1サイクル中のアクチュエーターが
動作している時間を%で表した稼働率のことです。
パルスモータータイプとACサーボモータータイプのアクチュエーターでは、使用
TM
可能なデューティー比の基準が異なりますのでご注意ください。 D= ×100(%)
D:デューティー比
TM+TR TM:動作時間(押付け動作を含む)
TR:停止時間
<パルスモーター>
パルスモーターを搭載した軸では、デューティー比100%で動作可能です。
タイプ パルスモーター搭載軸 タイプ パルスモーター搭載軸
CRS-XBA 全軸 CRS-XZCY
CRS-XBB R軸、BT軸 CRS-XZCZ
全軸
CRS-XGA 全軸 CRS-XZDY
CRS-XGB R軸、BT軸 CRS-XZDZ
CRS-XZEY
R軸、BT軸
CRS-XZEZ
13
Page15
お問合せは
0800-888-0088 CRS 直交型6軸ロボット
< AC サーボモーター>
AC サーボモーターを搭載した下記軸では、使用可能なデューティー比の目安は動作条件(加減速度等)によって変化します。
下記①「加速度別負荷率 (LF)」と下記②の計算式から算出した「加減速度時間比率 tod」を元に、③のグラフから求めてくだ
さい。
タイプ ACサーボモーター搭載軸 タイプ ACサーボモーター搭載軸
CRS-XBB CRS-XZEY
X軸、Y軸、Z軸 X軸、Y軸、Z軸
CRS-XGB CRS-XZEZ
1 下記「加速度別負荷率(LF)」一覧表から、負荷率LFを読み取ってください。
※負荷率は、各軸最大ストローク、最大可搬質量で算出した値です。
加減速度別負荷率 (LF) 一覧 [%]
最大可搬質量 各軸の加減速度[G]
機種 構成軸
kg 0.1 0.2 0.3 0.4 0.5
X 軸 21 42 62 83 ―
XBB 2 Y 軸 15 30 45 60 75
Z 軸 10 20 30 40 50
X 軸 22 44 67 89 ―
XGB 2 Y 軸 15 30 45 60 75
Z 軸 10 20 30 40 50
X 軸 18 37 55 74 92
XZEY
1 Z 軸 29 57 ― ― ―
XZEZ
Y 軸 13 26 40 53 66
2 以下の算出式から、加減速度時間比率 tod を算出してください。
加速時間 + 減速時間
加減速度時間比率:tod = ×100(%)
運転時間
速度( mm/s) 速度( mm/s)
加速時間 = ( 秒) 減速時間 = ( 秒)
加速度( mm/s2) 減速度( mm/s2)
加速度(mm/s2) = 加速度(G) × 9,800mm/s2 減速度(mm/s2) = 減速度(G) × 9,800mm/s2
3 ①「負荷率」と②「加減速度時間比率」から、下記グラフでデューティー比の目安を読み取ります。
(例)負荷率80%で加減速度時間比率80%の場合、デューティー比の目安は約75%です。
100 LF = 50%未満
動 80
作 LF = 60%
デ 約75% LF = 70%
ュ
ー LF = 80%
テ 60 LF = 90% 負
ィ 荷
ー LF = 100% 率(
比
40 %の )
目
安
(
%
) 20
0
0 20 40 60 80 100
加減速度時間比率 tod( %)
14
Page16
製品仕様・図面、CRS-XBA
CRS 直交型6軸ロボット
CRS-XBA バッテリー 24Vレスアブソ パルスモーター
■ 型式項目
C RS -X BA - W A - - - B - R 1 - - - - -
シリーズ - タイプ 組合せ方向 - エンコーダー種類 - 第1軸(X軸) - 第2軸(Y軸) - 第3軸(Z軸) - コントローラー - ケーブル長 ケーブルベア - オプション
1 下記 WA バッテリーレスアブソ ストローク オプション ストローク ストローク オプション R1 RSEL 1L 1m 第1配線 第2配線 第3配線 4B 下記
3 組合せ方向 5 50mm CJT 下記 5 50mm 9 90mm B ブレーキ 3L 3m 下記 5VC オプション価格表参照 CJR オプション価格表 5L 5m ケーブルベア価格表 5WCS 参照
80 800mm CJL 参照 30 300mm 19 190mm □L □m 参照
(50mm毎)CJB (50mm毎) (50mm毎)
最大可動範囲 X軸 Y軸 Z軸800 mm 300 mm 190 mm
最大可搬質量 1 kg
標準サイクルタイム 2.07 秒
位置繰返し精度 ± 0.03 mm
標準サイクルタイムは下記条件で、往復の最速動作をした場合の動作時間です。
水平移動 300mm
垂直移動
25mm
(1)サイクルタイムは参考値です。ストローク、動作パターンによっては
上記サイクルタイムより大きくなる場合があります。 (注) 上写真は組合せ方向「1」、全軸ケーブルベア付の場合になります。
選定上の (2)RSEL ドライバーユニットの高出力設定は「、有効」で使用してください。
注意 (3)位置繰返し精度は、「JIS B 8432 産業用ロボットの性能試験条件」に
準拠しています。
■ 組合せ方向 ■ 回転軸(R軸)/手首軸(B軸T軸)の動作方向
組合せ方向1 組合せ方向3
X軸 X軸
+
Y Y - R軸(Rotation)
軸 軸
R軸 R軸
Z軸 Z軸
BT軸 BT軸
-
+
B軸(Bending)
+ - T軸(Turning)
■ ストローク別価格表(標準価格)
X軸ストローク(mm)
50~300 350~600 650~800
Y 軸ストローク(mm)
50~150 - - -
200~300 - - -
(注) 上記はケーブルベア無し、配線無しの価格です。
■ ケーブル長価格表(標準価格) ■ ケーブルベア価格表(標準価格)
種類 ケーブル記号 長さ R1 標準価格
1 L 1m - 名称 型式 第1配線 第2配線 第3配線
3 L 3m - (X軸横) (Y軸横) (Z軸横)
標準タイプ 5L 5m - ケーブルベアなし(ケーブルのみ) N - - -
6L ~ 10L 6m ~ 10m - ケーブルベアSサイズ(内幅50mm()注1) CT 選択不可 - -
1 1L ~ 1 5L 11m ~ 15m - ケーブルベアMサイズ(内幅63mm) CTM - - -
(注) 全軸標準ケーブルとなります。 ケーブルベアLサイズ(内幅80mm()注2) CTL - - 選択不可
(注) 第2軸、第3軸ケーブルの長さはケーブルベア出口からの長さです。 ケーブルベアXLサイズ(内幅100mm()注3) CTXL - 選択不可
ケーブルベア内配線用として、ロボットケーブルが別途付属されます。
(注) 標準は1m、3m、5mですが、それ以外の長さもm単位で最大15mまで対応可能です。 (注1) 第2配線、第3配線のみ選択可能です。(注2) 第1配線、第2配線のみ選択可能です。
(注3) 第1配線のみ選択可能です。
■ オプション価格表(標準価格)
名称 オプション記号 参照頁 標準価格
ケーブル取出し方向(標準) 無記入 8 -
ケーブル取出し方向変更(上側) CJT 8 -
X軸 ケーブル取出し方向変更(右側) CJR 8 -
ケーブル取出し方向変更(左側) CJL 8 -
ケーブル取出し方向変更(下側) CJB 8 -
Z軸 ブレーキ(注4) B 8 標準装備
R軸 ブレーキ 4B 8 -
B軸/T軸 エア継手付き(注5) 5VC 8 -配線カラー付き 5WCS 8 -
(注4) Z軸はブレーキが標準装備となります。型式項目のZ軸オプション欄に必ずご記入ください。
(注5) 適応チューブ外径:φ6のエア継手が取付きます。
15 CRS-XBA
~
~
~
~
~
~
Page17
お問合せは
0800-888-0088 CRS 直交型6軸ロボット
■ メインスペック
項目 内容 項目 内容
最大可搬質量 1kg 使用環境温度・湿度 0~40℃、85%RH以下(結露なきこと)
位置繰返し精度 ±0.03mm 保護等級 -
耐振動・耐衝撃 4.9m/s2
海外対応規格 RoHS指令
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 XYZ軸 8192pulse/revRBT軸 8192pulse/rev
納期 ホームページ[納期照会]に記載
■ 構成軸スペック
PTP動作では、各軸の最大速度、最大加減速度で動作が可能です。
CP動作での速度、加減速度の上限値は、 56 ページの値を目安としてください。
■ X軸
項目 内容
構成軸型式 RCP6-WSA14C-WA-56P-16
加減速度・ストローク別 加減速度(G) 0.1 0.2 0.3
最高速度 ストローク(mm) 50~750 800 50~750 800 50~800最高速度(mm/s) 480 440 460 440 380
最小ストローク(mm) 50
ストローク 最大ストローク(mm) 800
ストロークピッチ(mm) 50
モーター種類 パルスモーター 56□サイズ
■ Y軸
項目 内容
構成軸型式 RCP6-WSA12C-WA-42P-12
速度/加減速度 加減速度(G) 0.1 0.2 0.3最高速度(mm/s) 400 400 400
最小ストローク(mm) 50
ストローク 最大ストローク(mm) 300
ストロークピッチ(mm) 50
モーター種類 パルスモーター 42□サイズ
■ Z軸
項目 内容
構成軸型式 RCP6-TA7R-WA-56P-4-□-B-DB
速度/加減速度 加減速度(G) 0.1 0.2 0.3最高速度(mm/s) 175 140 140
最小ストローク(mm) 90
ストローク 最大ストローク(mm) 190
ストロークピッチ(mm) 50
モーター種類 パルスモーター 56□サイズ
■ R軸
項目 内容
構成軸型式 RCP6-RTFML-WA-42P-30-360
速度/加減速度 加減速度(G)(注6) 0.3最高速度(度/s) 800
動作範囲(度) ±180
最大トルク(N・m)(注7) 5.2
最大許容慣性モーメント(kg・m2()注7) 0.08
モーター種類 パルスモーター 42□サイズ
(注6) 1G≒9807度/s2
(注7) 速度、加減速度により異なります。詳細は5 5ペ ージをご参照ください。
■ BT軸
項目 内容
軸構成 B軸(手首揺動) T軸(手首回転)
構成軸型式 WU-S-WA
加減速度(G()注8) 0.3 0.3
速度/加減速度 最高速度(度/s) 単独動作 750 1200B軸・T軸 同時動作 600 600
動作範囲(度) ±100 ±360
モーター種類 パルスモーター 28□サイズ
最大トルク(N・m()注9) 0.65 0.65
最大許容慣性モーメント(kg・m2)(注9) 0.0085 0.0075
(注8) 1G≒9807度/s2
(注9) 速度、加減速度により異なります。詳細は5 5 ページをご参照ください。
(注) BT軸はブレーキが標準装備です。
CRS-XBA 16
Page18
CRS 直交型6軸ロボット
■ 寸法図
※1 ケーブルベアが膨らみ、記載寸法より若干大きくなる可能性があります。
(注) 図面の組合せ位置が原点となります。
CAD図面がホームページよりダウンロード出来ます。
(注) 下記図面は、組合せ方向「1」・第1配線・第2配線・第3配線ともケーブルベア付きの場合の図面です。 www.iai-robot.co.jp
その他の図面はホームページでご確認ください。
Z:ST×2+532.5
191 51 Z:ST×2+290.5
Z:ST+181.5 Z:ST+351 99.5 X:ST+434 100以上確保
39 230(※1)
K 211
X軸ベース端面
-180(°右回り)
R軸動作範囲
+180(°左回り)
P
R軸動作範囲
点
動
作 動作範囲
範
囲
5 5
26
150 外枠はメカエンド位置を示す 42 75 56
3 3 90 120 77(※1) S
X:ST 533.5
Z:ST 401(※1)
X:ST+533.5
外枠はメカエンド位置を示す
118 18.5
M6通し(ねじ込み深さ4.5)
※エア配管取付用 4-M4深さ6 45 (J 50ST,100STは無し)
+100° (148) (J 50ST,100STは無し) 452-φ4H7リーマー深さ4
B軸動作範囲 100±0.0(2 50ST,100STは無し) 100±0.0(2 50ST,100STは無し)
39 M-φ8H7リーマー 2-長穴
10
ベース着座面より深さ9 ベース着座面より深さ9
12.5±0.02
H-φ9通し
.D.2
5 基準面 45 (F) G×100P 45
°
φ16.5座ぐり(反対側より)
P.C 45 (寸法B範囲) B
-100° P点(B軸回転中心) 100(50,100STは無し)
R83(R軸旋回部 最大外接半径)
B軸動作範囲
+360(°右回り) X軸ベース取付寸法
※構造物の干渉に注意のこと -360(°左回り)
T軸動作範囲 WU-S寸法詳細 3 1.3
9
φ9
X軸ベース長穴詳細 X軸ベース取付穴詳細 X軸側面Tスロット 詳細
WU-Sケーブル
CJT 29.3
中空
25 上側 5.2 5.2
部内 (16.2)
(43)
径φ48 CJL CJR
左側 右側
ユーザースペース
許容断面積:390mm2 CJB 2-M3深さ6
下側 (アース接続用)
R軸中空部詳細 X軸ケーブル取出し方向(オプション) X軸背面 詳細 X軸ケーブル接続部
17 CRS-XBA
71
φ34 h7
T 70 73
32
Y:ST+Q1
Y:ST+381.5 Q2
8+ 0.015 111.5 Y:ST 130 1400
200
5 5
138
120
148
34.5
32
(15.6)
22.5
3.3
5.8
Page19
お問合せは
0800-888-0088 CRS 直交型6軸ロボット
■ ストローク別寸法
X軸ストローク 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800
B 237 287 337 387 437 487 537 587 637 687 737 787 837 887 937 987
F 147 197 47 97 47 97 47 97 47 97 47 97 47 97 47 97
G 0 0 1 1 2 2 3 3 4 4 5 5 6 6 7 7
H 4 4 8 8 10 10 12 12 14 14 16 16 18 18 20 20
J - - 198 248 298 348 398 448 498 548 598 648 698 748 798 848
K 221 246 271 296 321 346 371 396 421 446 471 496 521 546 571 596
M 2 2 4 4 4 4 4 4 4 4 4 4 4 4 4 4
ケーブルベア
サイズ CT CTM CTL CTXL
Q1 - 491.5 508.5 528.5
Q2 - 110 127 147
S 286 297 314 -
T 91 102 - -
(注) ケーブルベアのサイズにより、Q1、Q2、S、Tの寸法が変わります。
■ ストローク別本体質量
X 軸ストローク(mm)
50~300 350~600 650~800
Y 軸ストローク(mm)
50~150 32~37 36~40 39~43
200~300 34~38 37~42 41~44
(単位はkg)
(注) 詳細の本体質量の計算方法は取扱説明書をご参照ください。
■ ケーブルベア断面図
ユーザースペース ユーザースペース ユーザースペース
9 W0 9 W0 9 W0
Bi Bi Bi
Ba Ba Ba
X-Y間ケーブルベア断面図 Y-Z間ケーブルベア断面図 Z-R間ケーブルベア断面図
ケーブルベアサイズ CT CTM CTL CTXL
使用ケーブルベア型式 B17.4.075.0 B17.5.075.0 B17.6.075.0 B17.7.075.0
Ba 60.5 76 93 113
Bi 50 63 80 100
W0 9 17 34 54
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
制御方法
名称 外観 最大接続可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページDV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
RSEL-SXBA
(CRS用) 8 DC24V - - ● ● ● ● ● - - - ● ● ● - - 36000 - 57
(注) DV、CCなどのネットワーク略称記号については、 58 ページをご確認ください。
CRS-XBA 18
12 12
15 15
32
39
12 12
15 15
32
39
12 12
15 15
32
39
Page20
CRS-XBB
CRS 直交型6軸ロボット
CRS-XBB バッテリー 24V 200Vレスアブソ パルス ACサーボモーター モーター
■ 型式項目
CRS -X BB - WA - - - B - R1 - - - - -
シリーズ - タイプ 組合せ方向 - エンコーダー種類 - 第1軸(X軸) - 第2軸(Y軸) - 第3軸(Z軸) - コントローラー - ケーブル長 ケーブルベア - オプション
1 下記 WA バッテリーレスアブソ ストローク オプション ストローク ストローク オプション R1 RSEL 1L 1m 第1配線 第2配線 第3配線 4B 下記
3 組合せ方向 5 50mm CJT 下記 5 50mm 10 100mm B ブレーキ 3L 3m 下記 5VC オプション価格表参照 CJR オプション価格表 5L 5m ケーブルベア価格表 5WCS 参照
110 1100mm CJL 参照 30 300mm 20 200mm □L □m 参照
(50mm毎)CJB (50mm毎) (50mm毎)
最大可動範囲 X軸 Y軸 Z軸1100 mm 300 mm 200 mm
最大可搬質量 2 kg
標準サイクルタイム 1.66 秒
位置繰返し精度 ± 0.03 mm
標準サイクルタイムは下記条件で、往復の最速動作をした場合の動作時間です。
水平移動 300mm
垂直移動
25mm
(1)サイクルタイムは参考値です。ストローク、動作パターンによっては
上記サイクルタイムより大きくなる場合があります。 (注) 上写真は組合せ方向「1」、全軸ケーブルベア付の場合になります。
(2)動作条件(搬送質量、加減速度等)によって、使用可能なデューティー
の目安は変化します。詳細は 13 ページをご参照ください。
選定上の
注意 (3)R 軸、BT 軸の RSEL ドライバーユニットの高出力設定は、「有効」で使
用してください。
(4)位置繰返し精度は、「JIS B 8432 産業用ロボットの性能試験条件」に
準拠しています。
■ 組合せ方向 ■ 回転軸(R軸)/手首軸(B軸T軸)の動作方向
組合せ方向1 組合せ方向3
X軸 Y X軸
+
Y - R軸(Rotation)
軸 軸
R軸 R軸
Z軸 Z軸
BT軸 BT軸
-
+
B軸(Bending)
-
+ T軸(Turning)
■ ストローク別価格表(標準価格)
X 軸ストローク(mm)
50~300 350~600 650~800 850~1100
Y 軸ストローク(mm)
50~150 - - - -
200~300 - - - -
(注) 上記はケーブルベア無し、配線無しの価格です。
■ ケーブル長価格表(標準価格) ■ ケーブルベア価格表(標準価格)
種類 ケーブル記号 長さ R1 標準価格
1L 1m - 名称 型式 第1配線 第2配線 第3配線
3L 3m - (X軸横) (Y軸横) (Z軸横)
標準タイプ 5L 5m - ケーブルベアなし(ケーブルのみ) N - - -
6L ~ 1 0L 6m ~ 10m - ケーブルベアSサイズ(内幅50mm()注4) CT 選択不可 - -
1 1L ~ 1 5L 11m ~ 15m - ケーブルベアMサイズ(内幅63mm) CTM - - -
(注) 全軸標準ケーブルとなります。 ケーブルベアLサイズ(内幅80mm) CTL - - -
(注) 第2軸、第3軸ケーブルの長さはケーブルベア出口からの長さです。 ケーブルベアXLサイズ(内幅100mm()注5) CTXL - 選択不可
ケーブルベア内配線用として、ロボットケーブルが別途付属されます。
(注) 標準は1m、3m、5mですが、それ以外の長さもm単位で最大15mまで対応可能です。 (注1) 第2配線、第3配線のみ選択可能です。(注2) 第1配線のみ選択可能です。
■ オプション価格表(標準価格)
名称 オプション記号 参照頁 標準価格
ケーブル取出し方向変更(上側)(注3) CJT 8 -
X軸 ケーブル取出し方向変更(右側()注3) CJR 8 - ケーブル取出し方向変更(左側)(注3) CJL 8 -
ケーブル取出し方向変更(下側()注3) CJB 8 -
Z軸 ブレーキ(注4) B 8 標準装備
R軸 ブレーキ 4B 8 -
B軸/T軸 エア継手付き(注5) 5VC 8 - 配線カラー付き 5WCS 8 -
(注3) 型式項目のオプション欄に必ずどれかの記号をご記入ください。
(注4) Z軸はブレーキが標準装備となります。型式項目のZ軸オプション欄に必ずご記入ください。
(注5) 適応チューブ外径:φ6のエア継手が取付きます。
19 CRS-XBB
~
~
~
~
~
~