



部品の高速組立・搬送に最適です。
スカラロボットIXAシリーズのご紹介です。アーム長800/1000mmタイプが登場しました。
■特徴
1. 業界最速のサイクルタイムを実現
2. 低価格を実現
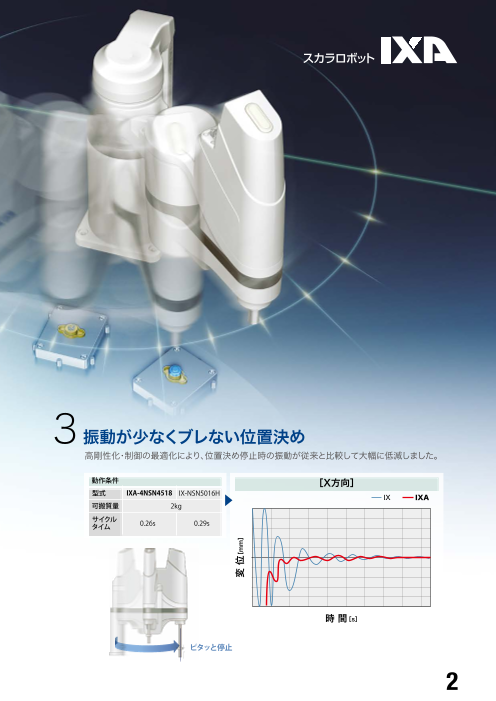
3. 振動が少なくブレない位置決め
4. バッテリーレスアブソリュートエンコーダー標準搭載
5. 機械的な構造・特徴
6. シミュレーションソフト
アプリケーション例などの詳細についてはダウンロード資料にてご覧ください。
このカタログについて
| ドキュメント名 | 業界最速!スカラロボットIXA |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 17.7Mb |
| 登録カテゴリ | |
| 取り扱い企業 | 株式会社アイエイアイ (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
スカラロボット IXA
アーム長
800/1000mmタイプ追加
代理店
Page2
特徴
スカラロボット
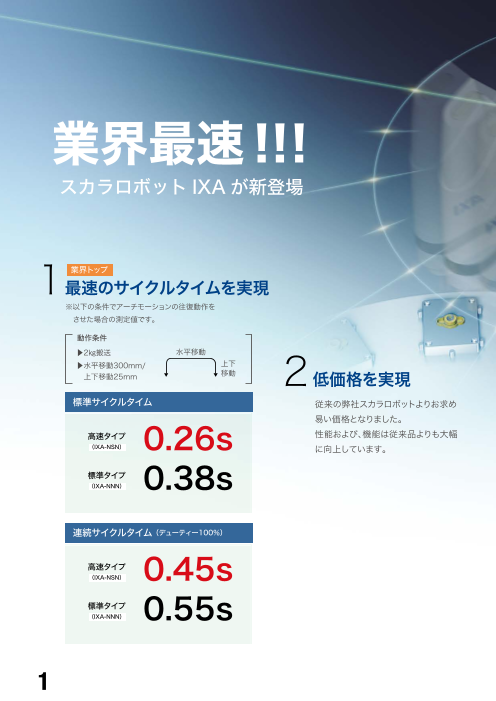
業界最速!!!
スカラロボット IXAが新登場
1 業界トップ
最速のサイクルタイムを実現
※以下の条件でアーチモーションの往復動作を
させた場合の測定値です。
動作条件
2㎏搬送 水平移動
水平移動300mm/ 上下
上下移動25mm 移動 2低価格を実現
標準サイクルタイム 従来の弊社スカラロボットよりお求め
易い価格となりました。
高速タイプ 0.26s 性能および、機能は従来品よりも大幅 3振動が少なくブレない位置決め
(IXA-NSN) に向上しています。 高剛性化・制御の最適化により、位置決め停止時の振動が従来と比較して大幅に低減しました。
標準タイプ 動作条件
(IXA-NNN) 0.38s [X方向]
型式 IXA-4NSN4518 IX-NSN5016H IX IXA
可搬質量 2kg
サイクル
タイム 0.26s 0.29s
連続サイクルタイム(デューティー100%)
高速タイプ
(IXA-NSN) 0.45s
標準タイプ
(IXA-NNN) 0.55s 時 間[s]
ピタッと停止
1
変 位[mm]
Page3
スカラロボット
業界最速!!!
スカラロボット IXAが新登場
1 業界トップ
最速のサイクルタイムを実現
※以下の条件でアーチモーションの往復動作を
させた場合の測定値です。
動作条件
2㎏搬送 水平移動
水平移動300mm/ 上下
上下移動25mm 移動 2低価格を実現
標準サイクルタイム 従来の弊社スカラロボットよりお求め
易い価格となりました。
高速タイプ 0.26s 性能および、機能は従来品よりも大幅 3振動が少なくブレない位置決め
(IXA-NSN) に向上しています。 高剛性化・制御の最適化により、位置決め停止時の振動が従来と比較して大幅に低減しました。
標準タイプ 動作条件
(IXA-NNN) 0.38s [X方向]
型式 IXA-4NSN4518 IX-NSN5016H IX IXA
可搬質量 2kg
サイクル
タイム 0.26s 0.29s
連続サイクルタイム(デューティー100%)
高速タイプ
(IXA-NSN) 0.45s
標準タイプ
(IXA-NNN) 0.55s 時 間[s]
ピタッと停止
2
変 位[mm]
Page4
4 バッテリーレスアブソリュートエンコーダー標準搭載 7 機械的な構造・特長
バッテリー交換作業が不要になり、メンテナンスの工数削減となります。
標準・高速タイプ
バッテリーレスアブソリュートのメリット フルカバー構造
バッテリーエラー(電圧低下など)で機械が 稼働部をカバーで覆う 特許出願中
ことで防塵性を
停止することがなくなります。 向上しました。 ケーブル内装
※アーム長800/1000は除く
交換用バッテリーの費用がかかりません。 ケーブルを内装化することで、
高さ寸法を低減し、
バッテリーの交換やアブソリュートリセットなどの手間がかかりません。 特許出願中 空間を有効活用することができます。
ダブルアーム構造
剛性向上により振動を
低減します。
5 放熱性が向上し連続サイクルタイムが
速くなりました。
耐環境に適した防塵・防滴仕様 ※アーム長180は除く
保護等級 IP65に対応しました。
防塵・防滴仕様
保護等級表示 アルミカバー採用
IP 直接噴流を受けても
カバー変形による
第2示性数字 ケーブル内装
水の浸入がありません。
水の浸入に対する保護 またクーラントによる
膨潤もありません。
第1示性数字
人体及び固形異物に対する保護 ダブルアーム構造
※アーム長300は除く
※
固形異物 (要約)耐じん形
粉塵は完全に遮断され本体内部に侵入しません。
IP65 (要約)噴流(water jet)に対して保護する。※
水 いかなる方向から水の直接噴流を受けても
有害な影響は受けません。
※IEC 60529 / JIS C 0920
8シミュレーションソフト パソコン対応ソフトの対応バージョンはHPをご確認ください。
6 配線・配管補助オプションの充実 スカラロボット本体がなくても、XSEL用パソコン対応ソフトを使用して、ロボットの動きを確認できます。
さらに、サイクルタイムの計算もできます。
アーム長800㎜ /1000㎜タイプは、先端ツールまでの配線が行ないやすいように、
お客様の用途に合わせてオプションを選択することができます。 サイクルタイム表示
Z軸配線上面ステー
外部配線保護フランジ
R軸配線保護フランジ
拡張ユーザーケーブル内装
カメラ
ロボット先端の軌跡を
Z軸配線側面ステー アニメーション表示する
グリッパー こともできます。
センサーアンプ
3
Page5
4 バッテリーレスアブソリュートエンコーダー標準搭載 7 機械的な構造・特長
バッテリー交換作業が不要になり、メンテナンスの工数削減となります。
標準・高速タイプ
バッテリーレスアブソリュートのメリット フルカバー構造
バッテリーエラー(電圧低下など)で機械が 稼働部をカバーで覆う 特許出願中
ことで防塵性を
停止することがなくなります。 向上しました。 ケーブル内装
※アーム長800/1000は除く
交換用バッテリーの費用がかかりません。 ケーブルを内装化することで、
高さ寸法を低減し、
バッテリーの交換やアブソリュートリセットなどの手間がかかりません。 特許出願中 空間を有効活用することができます。
ダブルアーム構造
剛性向上により振動を
低減します。
5 放熱性が向上し連続サイクルタイムが
速くなりました。
耐環境に適した防塵・防滴仕様 ※アーム長180は除く
保護等級 IP65に対応しました。
防塵・防滴仕様
保護等級表示 アルミカバー採用
IP 直接噴流を受けても
カバー変形による
第2示性数字 ケーブル内装
水の浸入がありません。
水の浸入に対する保護 またクーラントによる
膨潤もありません。
第1示性数字
人体及び固形異物に対する保護 ダブルアーム構造
※アーム長300は除く
※
固形異物 (要約)耐じん形
粉塵は完全に遮断され本体内部に侵入しません。
IP65 (要約)噴流(water jet)に対して保護する。※
水 いかなる方向から水の直接噴流を受けても
有害な影響は受けません。
※IEC 60529 / JIS C 0920
8シミュレーションソフト パソコン対応ソフトの対応バージョンはHPをご確認ください。
6 配線・配管補助オプションの充実 スカラロボット本体がなくても、XSEL用パソコン対応ソフトを使用して、ロボットの動きを確認できます。
さらに、サイクルタイムの計算もできます。
アーム長800㎜ /1000㎜タイプは、先端ツールまでの配線が行ないやすいように、
お客様の用途に合わせてオプションを選択することができます。 サイクルタイム表示
Z軸配線上面ステー
外部配線保護フランジ
R軸配線保護フランジ
拡張ユーザーケーブル内装
カメラ
ロボット先端の軌跡を
Z軸配線側面ステー アニメーション表示する
グリッパー こともできます。
センサーアンプ
4
Page6
9コントローラーによる制御機能 アプリケーション
■コンプライアンス制御 タッチパネル検査ボックスへの高速搬送
外力にならうように柔らかくロボットを制御して 単軸ロボットと組み合わせ、前後左右の
ワーク挿入などの接触力を低減し、ワークの嵌め合いを補助 /支援します。 広いエリアに、ワークを搬送できます。
※アーム長180/800/1000、防塵・防滴仕様は対応していません。
<例>ピンを部品(ワーク)に挿入する際、位置誤差がある場合
通常制御時 コンプライアンス制御時
ピンが挿入部の面取り位置に ピンが挿入部の面取り側面に沿って、
当たってしまい挿入できません。 ピンの挿入を支援します。
挿入 挿入
NG OK
部品の高速組立・搬送
ワーク ワーク 2 台のスカラが互いの作業領域に侵入して作業するため、
無駄のないサイクルで効率よく動作します。
【注意事項】
・使用条件によって、ワークの挿入が行えない場合があります。
・Z軸に対する傾き方向には追従できません。
・ワークや挿入する穴の材質によっては、傷をつける場合があります。
■衝突検知機能
スカラロボットが物体に衝突したことを検出すると、速やかに動作が停止します。
衝突時のハンドやワーク、ロボットの損傷を軽減します。
※アーム長180、防塵・防滴仕様は対応していません。
衝突レベルが設定した衝突検知レベル以上に
なった場合衝突検出と判定されます。
衝突レベル
衝突 衝突 ラジエーターやチップの高速ピック&プレース
検出 衝突検知
レベル パーツフィーダーから供給される部品を
高速動作でピック&プレースができます。
時間
エラー出力
コントローラー
【注意事項】
・人体に対する安全を保証するものではありません。
・周辺機器等の損傷低減を目的とした補助機能です。損傷を100%防止する機能ではありません。
5
Page7
アプリケーション
9コントローラーによる制御機能 アプリケーション
■コンプライアンス制御 タッチパネル検査ボックスへの高速搬送
外力にならうように柔らかくロボットを制御して 単軸ロボットと組み合わせ、前後左右の
ワーク挿入などの接触力を低減し、ワークの嵌め合いを補助 /支援します。 広いエリアに、ワークを搬送できます。
※アーム長180/800/1000、防塵・防滴仕様は対応していません。
<例>ピンを部品(ワーク)に挿入する際、位置誤差がある場合
通常制御時 コンプライアンス制御時
ピンが挿入部の面取り位置に ピンが挿入部の面取り側面に沿って、
当たってしまい挿入できません。 ピンの挿入を支援します。
挿入 挿入
NG OK
部品の高速組立・搬送
ワーク ワーク 2 台のスカラが互いの作業領域に侵入して作業するため、
無駄のないサイクルで効率よく動作します。
【注意事項】
・使用条件によって、ワークの挿入が行えない場合があります。
・Z軸に対する傾き方向には追従できません。
・ワークや挿入する穴の材質によっては、傷をつける場合があります。
■衝突検知機能
スカラロボットが物体に衝突したことを検出すると、速やかに動作が停止します。
衝突時のハンドやワーク、ロボットの損傷を軽減します。
※アーム長180、防塵・防滴仕様は対応していません。
衝突レベルが設定した衝突検知レベル以上に
なった場合衝突検出と判定されます。
衝突レベル
衝突 衝突 ラジエーターやチップの高速ピック&プレース
検出 衝突検知
レベル パーツフィーダーから供給される部品を
高速動作でピック&プレースができます。
時間
エラー出力
コントローラー
【注意事項】
・人体に対する安全を保証するものではありません。
・周辺機器等の損傷低減を目的とした補助機能です。損傷を100%防止する機能ではありません。
アプリケーション 6
Page8
型式項目
型式項目
IXA T2
シリーズ タイプ ケーブル長 適応コントローラー オプション
3NNN1805 3軸標準タイプ/アーム長180mm/上下軸50mm T2 XSEL-RAX/SAX EXC 拡張ユーザーケーブル
内蔵仕様
4NNN1805 4軸標準タイプ/アーム長180mm/上下軸50mm
LED 表示灯
3NNN3015 3軸標準タイプ/アーム長300mm/上下軸150mm
4NNN3015 4軸標準タイプ/アーム長300mm/上下軸150mm
3NNN4518 3軸標準タイプ/アーム長450mm/上下軸180mm N なし
4NNN4518 4軸標準タイプ/アーム長450mm/上下軸180mm 5L 5m
3NNN4533 3軸標準タイプ/アーム長450mm/上下軸330mm
4NNN4533 4軸標準タイプ/アーム長450mm/上下軸330mm 10L 10m
3NNN6018 3軸標準タイプ/アーム長600mm/上下軸180mm □L 長さ指定(1m単位)最長15m
4NNN6018 4軸標準タイプ/アーム長600mm/上下軸180mm
3NNN6033 3軸標準タイプ/アーム長600mm/上下軸330mm
4NNN6033 4軸標準タイプ/アーム長600mm/上下軸330mm
4NNN8020 4 軸標準タイプ/ アーム長 800mm/上下軸 200mm
4NNN8040 4 軸標準タイプ/ アーム長 800mm/上下軸 400mm
4NNN10020 4 軸標準タイプ/ アーム長 1000mm/上下軸 200mm
4NNN10040 4 軸標準タイプ/ アーム長 1000mm/上下軸 400mm
3NSN3015 3軸高速タイプ/アーム長300mm/上下軸150mm
4NSN3015 4軸高速タイプ/アーム長300mm/上下軸150mm
3NSN4518 3軸高速タイプ/アーム長450mm/上下軸180mm
4NSN4518 4軸高速タイプ/アーム長450mm/上下軸180mm
3NSN4533 3軸高速タイプ/アーム長450mm/上下軸330mm
4NSN4533 4軸高速タイプ/アーム長450mm/上下軸330mm
3NSN6018 3軸高速タイプ/アーム長600mm/上下軸180mm
4NSN6018 4軸高速タイプ/アーム長600mm/上下軸180mm
3NSN6033 3軸高速タイプ/アーム長600mm/上下軸330mm
4NSN6033 4軸高速タイプ/アーム長600mm/上下軸330mm
4NSN8020 4 軸高速タイプ/ アーム長 800mm/上下軸 200mm
4NSN8040 4 軸高速タイプ/ アーム長 800mm/上下軸 400mm
4NSN10020 4 軸高速タイプ/ アーム長 1000mm/上下軸 200mm
4NSN10040 4 軸高速タイプ/ アーム長 1000mm/上下軸 400mm
4NSW3015 防塵・防滴仕様 4軸高速タイプ/アーム長300mm/上下軸150mm
4NSW4518 防塵・防滴仕様 4軸高速タイプ/アーム長450mm/上下軸180mm
4NSW4533 防塵・防滴仕様 4軸高速タイプ/アーム長450mm/上下軸330mm
4NSW6018 防塵・防滴仕様 4軸高速タイプ/アーム長600mm/上下軸180mm
4NSW6033 ※タイプによってオプションの選択範囲は変わります。
防塵・防滴仕様 4軸高速タイプ/アーム長600mm/上下軸330mm 詳細は各タイプの掲載ページをご参照ください。
(例) IXA - 3 NNN 45 18 - 5L - T2 - LED
軸数:3軸 アーム長: ケーブル長:5m
450mm コントローラー: オプション:
XSEL-RAX/SAX 表示灯
タイプ:標準 上下軸ストローク:
180mm
7 型式項目
Page9
製品ラインナップ
製品ラインナップ
アーム長(mm) 上下 標準 連続
タイプ 型式 軸数 ストローク サイクル サイクル 最大可搬
質量(kg) 標準価格 掲載ページ
第1アーム 第2アーム (mm) タイム(s) タイム(s)
IXA-3NNN1805 3 軸 ー ▶ P9
80 100 50 0.26 0.45 1
IXA-4NNN1805 4 軸 ー ▶ P9
IXA-3NNN3015 3 軸 ー ▶ P13
120 180 150 3
IXA-4NNN3015 4 軸 ー ▶ P13
IXA-3NNN4518 3 軸 ー ▶ P17
180
IXA-4NNN4518 4 軸 ー ▶ P17
200 250 3
IXA-3NNN4533 3 軸 ー ▶ P17
330 0.38 0.55
IXA-4NNN4533 4 軸 ー ▶ P17
標準タイプ
IXA-3NNN6018 3 軸 ー ▶ P23
180
IXA-4NNN6018 4 軸 ー ▶ P23
350 250 6
IXA-3NNN6033 3 軸 ー ▶ P23
330
IXA-4NNN6033 4 軸 ー ▶ P23
NEW IXA-4NNN8020 4 軸 200 ー ▶ P29
400 400 0.43 21
NEW IXA-4NNN8040 4 軸 400 ー ▶ P29
0.79
NEW IXA-4NNN10020 4 軸 200 ー ▶ P35
600 400 0.45 21
NEW IXA-4NNN10040 4 軸 400 ー ▶ P35
IXA-3NSN3015 3 軸 ー ▶ P41
120 180 150 8
IXA-4NSN3015 4 軸 ー ▶ P41
IXA-3NSN4518 3 軸 ー ▶ P45
180
IXA-4NSN4518 4 軸 ー ▶ P45
200 250 10
IXA-3NSN4533 3 軸 ー ▶ P45
330 0.26 0.45
IXA-4NSN4533 4 軸 ー ▶ P45
IXA-3NSN6018 3 軸 ー ▶ P51
高速タイプ 180
IXA-4NSN6018 4 軸 ー ▶ P51
350 250 12
IXA-3NSN6033 3 軸 ー ▶ P51
330
IXA-4NSN6033 4 軸 ー ▶ P51
NEW IXA-4NSN8020 4 軸 200 ー ▶ P57
400 400 0.29 0.56 24
NEW IXA-4NSN8040 4 軸 400 ー ▶ P57
NEW IXA-4NSN10020 4 軸 200 ー ▶ P63
600 400 0.32 0.56 24
NEW IXA-4NSN10040 4 軸 400 ー ▶ P63
IXA-4NSW3015 4 軸 155 145 150 0.38 0.69 6 ー ▶ P69
IXA-4NSW4518 180 ー ▶ P73
防塵・防滴仕様 4 軸 200 250 0.38 0.55 8
IXA-4NSW4533 330 ー ▶ P73
高速タイプ
IXA-4NSW6018 180 ー ▶ P79
4 軸 350 250 0.38 0.57 10
IXA-4NSW6033 330 ー ▶ P79
製品ラインナップ 8
Page10
製品仕様・図面、IXA-3NNN1805/IXA-4NNN1805
IXA スカラロボット
IXA-3NNN1805 バッテリー アーム長
レスアブソ 180
IXA-4NNN1805 mm
■ 型式項目
I XA - NNN 18 05 - - T2
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー
3 3軸 NNN 標準タイプ 18 180mm 5 50mm N なし T2 XSEL-RAX/SAX
4 4軸 5L 5m
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 9)は、8 7 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量及び移動距離、場所により最大設定値
IXA-3NNN1805 - が変化します。また、最大設定値での連続動作を行うと過負荷エラー
IXA-4NNN1805 - が出る場合があります。連続動作を行う際は加減速値を下げるか、
デューティー(目安)を参考にして加減速後に停止時間を設けてくだ
■ 別売オプション価格表(標準価格) 選定上の さい。
注意 (3)モーター交換を行った時などは、アブソリュートリセットを行う必要
名称 型式 参照頁 標準価格 があります。回転軸(4 軸目)のアブソリュートリセットには、調整
ユーザーケーブル CB-IXA-USR□□□-CS 9 1 - ジグが必要となります。詳細は 92 ページをご参照ください。
フランジ IX-FL-4 9 0 - (4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。
(注) 別途ご注文ください。 動作可能条件は「加減速度設定の目安」をご確認ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 3軸仕様 4軸仕様
標準タイプ 5L (5m) - -
1 0L (10m) - -
1L (1m) ~ 4L (4m) - -
6L( 6m) ~ 9L (9m) - -
11L( 11m) - -
長さ指定 12L (12m) - -
13L (13m) - -
1 4L (14m) - -
1 5L (15m) - -
(注) 下記ケーブルの合計金額となります。
[3軸仕様]モーターケーブル:3本 ・エンコーダーケーブル:3本 ・ブレーキケーブル:1本
[4軸仕様]モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
9 IXA-3NNN1805/4NNN1805
Page11
お問合せは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容 内容
3軸仕様 4軸仕様 項目 3軸仕様 4軸仕様
最大可搬質量(kg()注1) 1 水平面内 ±0.01mm
合成最高速度(mm/s) 2638 位置繰返し精度 上下軸 ±0.01mm
速度 第1アーム(度/s) 540 (注4) 回転軸 - ±0.01度
(注2) 各軸最高速度 第2アーム(度/s) 540 ユーザー配線 10芯(9芯+シールド) AWG25(定格30V/MAX1A)
上下軸(mm/s) 850 ユーザー配管 外径φ4 内径φ2.5 エアチューブ2本
回転軸(度/s) - 1600 (最高使用圧力0.6MPa)
押付け(N()注3) 上限 40 アラーム表示灯(注5) アンバー色LED 小型表示灯1個( DC24V供給必要)
下限 5 ブレーキ解除スイッチ(注6) 上下軸落下防止用ブレーキ解除スイッチ
アーム長(mm) 180 先端軸 許容トルク 0.35N・m 0.35N・m
各軸アーム長(mm) 第1アーム 80 許容負荷モーメント 0.5N・m
第2アーム 100 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±125 保護等級 IP20
各軸動作範囲 第2アーム(度) ±145 耐振動・耐衝撃 衝撃・振動が加わらないこと
上下軸(mm) 50 騒音(注7) 80dB以下
回転軸(度) - ±360 海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 50W
モーター容量 第2アーム 50W
上下軸 50W
回転軸 ― 50W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 16384 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.26秒 3軸仕様 2
連続サイクルタイム 0.45秒 4軸仕様 0.004 kg・m
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした 動作時、スプライン先端からの水平方向寸法および上下方向寸法は下記の制限を目安に
場合の所要時間を表します。 ご使用ください。負荷オフセットが大きい場合、異音や振動の発生、故障、寿命の低下
0.2kg搬送、上下移動25mm、水平移動100mm(粗位置決めアーチモーション) の原因となります。適宜速度、加減速度を調整、もしくは重心のバランス調整をしてく
【標準サイクルタイム】 ださい。負荷や動作条件によって張出し長は制限されます。
最速動作の場合の所要時間です。一般に高速性能の目安となります。最速動作での連続
動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
上下移動
負荷
重心
水平方向
水平方向 上下方向
30mm以下 20mm以下
IXA-3NNN1805/4NNN1805 10
上下方向
Page12
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティーの目安グラフを参考に停止時間を
設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの連続運転目安範囲の設定で動作させてください。
(1)PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各搬送質量で動作することの出来る最大加減速度を100%としています。
同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。
(2)加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3)過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティーの目安を参考に停止時間を設ける調整を行ってください。
(4)デューティー(%)=(運転時間/(運転時間+停止時間))×100
(5)ロボットを高速で水平移動させたい場合は出来るだけ上下軸を上昇端付近で動作させてください。
(6)慣性モーメント、搬送質量は許容値以下としてください。
(7)搬送負荷は第4軸回転中心の慣性モーメント、質量を示します。
(8)質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動をまねきます。
(9)負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NNN180_PTP加減速度設定の目安 NNN180_PTP動作デューティー設定の目安
100% 100%
最大設定範囲
80% 80%
70%
60% 60%
.5kg
kg,
0
0.2
40%
40% 40%
30% 40%
.0kg
連続運転目安範囲 1
20% 20%
0% 0%
0 0.2 0.4 0.6 0.8 1 100% 80% 60% 40% 20% 0%
搬送負荷質量(kg)
デューティー(%)
0 負荷慣性モーメント(kg・m2) 0.004
■ CP動作 ■ CP動作 速度・加減速度制限
水平 上下
上下軸(Z軸)動作なし水平移動動作
NNN180_CP加減速度設定の目安 NNN180_CP加減速度設定の目安 700
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作 570
2 2 600 540
510 480
500
最大設定範囲 1.0G 1.0G
400
1.5 1.5 1.0G
300
200
1 1 100
最大設定範囲 0
0 0.2 0.4 0.6 0.8 1
連続運転目安範囲 搬送負荷質量(kg)
0.5 0.5 連続運転目安範囲
最大速度600mm/s 最大速度300mm/s
0.2
0 0 上下軸(Z軸)のみの動作
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 1000
807
搬送負荷質量(kg) 搬送負荷質量(kg) 765
850 722
800 680
0 負荷慣性モーメント(kg・m2) 0.004 0 負荷慣性モーメント(kg・m2) 0.004 2.0G 2.0G
600
1.5G
NNN180_CP動作デューティー設定の目安 NNN180_CP動作デューティー設定の目安 400
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
2 2 200
0
0 0.2 0.4 0.6 0.8 1
1.5 1.5 搬送負荷質量(kg)
0.2kg, 0.5kg, 1.0kg
1 1
0.5 0.5
0.2kg ,0.5kg ,1.0kg
0.2
0 0
100% 80% 60% 40% 20% 0% 100% 80% 60% 40% 20% 0%
デューティー(%) デューティー(%)
11 IXA-3NNN1805/4NNN1805
加減速度(G) 加減速度(G) 加減速度(%)
加減速度(G) 加減速度(%)
加減速度(G)
CP速度(mm/s) CP速度(mm/s)
Page13
お問合せは
0800-888-0088 IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
(注) ケーブル接続に関しては 87 ページ(注9)を参照ください。
ST:ストローク
M.E.:メカニカルエンド
S.E.:ストロークエンド
ユーザ-配線用D-subコネクター 6 部)
(9極、ソケット、固定具M2.6) 基準面 M3深さ6(アース接続用) R 平面
配線:25AWG、10芯(9芯+シールド) W (
2-M3深さ6 Y Y
詳細図 K
ベース取付け穴詳細
赤 黄
φ6.6
2-φ4エアチューブ 63 20 45
ワンタッチ継手 10 80 K
詳細図 W 127
194.6
ユーザーパネル詳細
(395)
37 180 (178) 断面図 Y-Y
100 80 (4箇所)
LED表示灯
(アンバー色)
2-M3深さ6
(反対側も同様)
M.E. X
原点 P 5 15
S.E.
M.E.
(100)
基準面 45 149.5 (28.7)配線空間 2-φ4エアチューブ ブレーキ解除
φ15 着座面 ワンタッチ継手 スイッチ
Q モーター 赤 ブレーキ
ケーブル接続 ケーブル接続
6 + 0 . 0 1 20 深さ6 黄
(ベース着座面より) R)
(
Z Z ユーザ-配線用
D-subコネクター
断面図 Z-Z 詳細図 Q (15極、ソケット、
固定具M2.6)
ベース長穴詳細 配線:25AWG、
50 φ6 H7リーマー深さ6 詳細図 X 10芯(9芯+シールド)
詳細図 P エンコーダー
ケーブル接続 背面パネル詳細
R18 7.4 R57 R1 8 0
0 R5 .4
80 R80
R R
1
00 R100
3.6° 53
10.6 5 .6° 10.6
68 68
■ 質量 左腕系 動作範囲 右腕系 動作範囲
項目 内容
質量 3軸仕様 5.8kg
4軸仕様 6.2kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
最大接続 制御方法
名称 外観 可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページ
DV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-RAX/SAX 8 三相AC200V - - ● ● ● - ● - - - ● ● - - - 36666
(タイプにより異なります) - 9 3
(注) DV、CCなどのネットワーク略称記号については、 総合カタログ2020・7-17 ページをご確認ください。
(注) 最大でスカラ+4軸ロボットの制御が可能です。
IXA-3NNN1805/4NNN1805 12
28
5 4
350
φ8 124.9 28h7 81.4
7.5 3 50ST 3 80
74
81.4
125°
80 10
8 50
84 81.2
98
125°
8 147.4 (9)
333 (4.5)
R100
145°
8.9
°
125
125
°
00
R1
°
14
5
Page14
IXA-3NNN3015/IXA-4NNN3015
IXA スカラロボット
IXA-3NNN3015 バッテリー アーム長
レスアブソ 300
IXA-4NNN3015 mm
■ 型式項目
I XA - NNN 3 0 1 5 - - T2 -
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー - オプション
3 3軸 NNN 標準タイプ 30 300mm 15 150mm N なし T2 XSEL-RAX/SAX 下記オプション
4 4軸 5L 5m 価格表参照
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 9)は、 87 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量及び移動距離、場所により最大設定値
IXA-3NNN3015 - が変化します。また、最大設定値での連続動作を行うと過負荷エラー
IXA-4NNN3015 - が出る場合があります。連続動作を行う際は加減速値を下げるか、
デューティー(目安)を参考にして加減速後に停止時間を設けてくだ
■ オプション価格表(標準価格) 選定上の さい。
注意 (3)モーター交換を行った時などは、アブソリュートリセットを行う必要
名称 型式 参照頁 標準価格 があります。回転軸(4 軸目)のアブソリュートリセットには、調整
表示灯 LED 89 - ジグが必要となります。詳細は 92 ページをご参照ください。
(4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。
■ 別売オプション価格表(標準価格) 動作可能条件は「加減速度設定の目安」をご確認ください。
名称 型式 参照頁 標準価格
ユーザーケーブル CB-IXA-USR□□□-CS 9 1 -
フランジ IX-FL-1 90 -
(注) 別途ご注文ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 3軸仕様 4軸仕様
標準タイプ 5 L( 5m) - -
1 0L (10m) - -
1L (1m) ~ 4L (4m) - -
6L (6m) ~ 9 L( 9m) - -
1 1L (11m) - -
長さ指定 12L( 12m) - -
13L( 13m) - -
14L( 14m) - -
1 5L (15m) - -
(注) 下記ケーブルの合計金額となります。
[3軸仕様]モーターケーブル:3本 ・エンコーダーケーブル:3本 ・ブレーキケーブル:1本
[4軸仕様]モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
13 IXA-3NNN3015/4NNN3015
Page15
お問合せは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容 内容
3軸仕様 4軸仕様 項目 3軸仕様 4軸仕様
最大可搬質量(kg)(注1) 3
合成最高速度(mm/s) 5529 位置繰返し精度 水平面内 ±0.01mm
上下軸 ±0.01mm
速度 第1アーム(度/s) 660 (注4) 回転軸 - ±0.005度
(注2) 各軸最高速度 第2アーム(度/s) 660 ユーザー配線 10芯(9芯+シールド) AWG24(定格30V/MAX1A)
上下軸(mm/s) 1400 ユーザー配管 外径φ4 内径φ2.5 エアチューブ3本
回転軸(度/s) - 1600 (最高使用圧力0.6MPa)
押付け(N()注3) 上限 60 アラーム表示灯(注5) オプション(アンバー色LED 小型表示灯1個 DC24V供給必要)
下限 10 ブレーキ解除スイッチ(注6) 上下軸落下防止用ブレーキ解除スイッチ
アーム長(mm) 300 先端軸 許容トルク 3.2N・m 3.2N・m
各軸アーム長(mm) 第1アーム 120 許容負荷モーメント 4.5N・m
第2アーム 180 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±135 保護等級 IP20
各軸動作範囲 第2アーム(度) ±142 耐振動・耐衝撃 衝撃・振動が加わらないこと
上下軸(mm) 150 騒音(注7) 80dB以下
回転軸(度) - ±360 海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 400W
モーター容量 第2アーム 200W
上下軸 100W
回転軸 ― 100W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 16384 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.38秒 3軸仕様 2
連続サイクルタイム 0.55秒 4軸仕様 0.06 kg・m
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした 第4軸許容慣性モーメントは、スカラロボットの第4軸(回転軸)の回転中心換算の慣性
場合の所要時間を表します。 モーメント許容値です。第4軸回転中心からツール重心までのオフセット量は、下記の
2kg 搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) 数値以内としてください。ツール重心位置が第4軸中心位置を離れた場合は、速度・加
【標準サイクルタイム】 速度を適宜落とす必要があります。負荷や動作条件によって張出し長は制限されます。
最速動作の場合の所要時間です。一般に高速性能の目安となります。最速動作での連続
動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
上下移動
負荷
重心
水平方向
水平方向 上下方向
150mm以下 100mm以下
IXA-3NNN3015/4NNN3015 14
上下方向
Page16
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティーの目安グラフを参考に停止時間を
設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの、連続運転目安範囲の加減速度設定で動作させてください。
(1)PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラ高速対応品は各搬送質量で動作することの出来る最大加減速度を100%と
しています。同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。
(2)加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3)過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティーの目安を参考に停止時間を設ける調整を行ってください。
(4)デューティー(%)=(運転時間/(運転時間+停止時間))×100
(5)ロボットを高速で水平移動させたい場合は出来るだけ上下軸を上昇端付近で動作させてください。
(6)慣性モーメント、搬送質量は許容値以下としてください。
(7)搬送負荷は第4軸回転中心の慣性モーメント、質量を示します。
(8)4軸仕様の質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動をまねきます。
(9)負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NNN300_PTP加減速度設定の目安 NNN300_PTP動作デューティー設定の目安
100% 100%
90% 最大設定範囲 90%
80% 80%
70% 70% 70%
60% 60% 2kg 60%
50%
50% 50%
40% 50%
40% 3kg
40%
30% 40%
20% 連続運転目安範囲 30%
10% 20%
0% 10%
0 1 2 3
0%
搬送負荷質量(kg) 100% 80% 60% 40% 20% 0%
0 0.06 デューティー(%)
負荷慣性モーメント(kg・m2)
■ CP動作 ■ CP動作 速度・加減速度制限
水平 上下
上下軸(Z軸)動作なし水平移動動作
NNN300_CP加減速度設定の目安 NNN300_CP加減速度設定の目安
上下軸(Z軸)なし水平移動動作 上下軸(Z軸)のみの動作
2.5 2.5
1400
1200
2 2 最大設定範囲 1000 NNN:1.0G NNN:1.0G
800
1.5 1.5 600
400
200
1 1
0
最大設定範囲 0.8 0 1 2 3 4 5 6 7 8
0.5 連続運転目安範囲 0.5 連続運転目安範囲 搬送負荷質量(kg)
0 0
0 1 2 3 0 1 2 3 上下軸(Z軸)のみの動作
搬送負荷質量(kg) 搬送負荷質量(kg)
0 0.06 1600
負荷慣性モーメント(kg・m2) 1400
1200 NNN:1.5G
1000 NNN:1.5G
800
NNN300_CP動作デューティー設定の目安 600
上下軸(Z軸)のみの動作
400
2.5
200
0
2 0 1 2 3 4 5 6 7 8
搬送負荷質量(kg)
1kg
1.5
3kg
1
0.8
0.5
0
100% 80% 60% 40% 20% 0%
デューティー(%)
15 IXA-3NNN3015/4NNN3015
加減速度(G) 加減速度(%)
加減速度(G) 加減速度(G) 加減速度(%)
CP速度(mm/s) CP速度(mm/s)
Page17
お問合せは
0800-888-0088 IXA スカラロボット
■ 寸法図
CAD図面がホームページよりダウンロード出来ます。
www.iai-robot.co.jp
(注) ケーブル接続に関しては 87ペ ージ(注9)を参照ください。 ST:ストローク
基準面 M4深さ8(アース接続用) M.E.:メカニカルエンド
ユーザー配線用D-subコネクター
(9極、ソケット、固定具M2.6) W S.E.:ストロークエンド
R10.5
配線:24AWG、10芯(9芯+シールド) LED表示灯
2-M4深さ8 (アンバー色)
3-膜付グロメット 【オプション選択時】
(φ4 ユーザー配管用)
Y Y
膜付グロメット 10.5
(ユーザー配線・配管用) 141 92.5
15 155 K 詳細図 K
182 ベース取付け穴詳細
251.5
φ9
詳細図 W
ユーザーパネル詳細 (544.5)
56.5 300 (188)
180 120
断面図 Y-Y
(4箇所)
M.E.
ブレーキ解除スイッチ
原点 P
X
ブレーキケーブル接続
S.E. モーター・エンコーダー
ケーブル接続
M.E. (1軸目)
モーター・エンコーダー
ケーブル接続
(2~4軸目)
(100)
基準面 92.5 154.9 (33.1) 配線空間 3-膜付グロメット
(φ4 ユーザー配管用)
φ40 着座面 ユーザー配線用
D-subコネクター
4-M4深さ8 Q +0
3125 10 0 . 0 1 5 深さ6 (15極、プラグ、
(ベース着座面より) 固定具M2.6)
φ h7 ) 配線:24AWG、
14 0
2 R 10芯(9芯+シールド)
中空 φ (
Z Z
断面図 Z-Z 92.5 φ10 H7リーマー深さ6 詳細図 Q 詳細図 X
ベース長穴詳細 背面パネル詳細
詳細図 P
R300 R300
R112.9 R112.9
R120 R120
R180 R180
4
0.2° 0
4 .2
100 ° 100
左腕系 動作範囲 右腕系 動作範囲
■ 質量
項目 内容
質量 3軸仕様 21kg
4軸仕様 22kg
■ 適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
制御方法
名称 外観 最大接続
可能軸数 電源電圧 ポジショナー パルス列 プログラム ネットワーク ※選択 最大位置決め点数 標準価格 参照ページ
DV CC CIE PR CN ML ML3 EC EP PRT SSN ECM
XSEL-RAX/SAX 8 三相AC200V - - ● ● ● - ● - - - ● ● - - - 36666
(タイプにより異なります) - 93
(注) DV、CCなどのネットワーク略称記号については、 総合カタログ2020・7-17 ページをご確認ください。
(注) 最大でスカラ+4軸ロボットの制御が可能です。
IXA-3NNN3015/4NNN3015 16
65
1010
694.8
19 347.5
259
85 5 150ST 5 142
62 (104.3)
135°
261
50
15 140 85
(103.7)
140 15
372 167.5
643.8 (8.7)
12
135°
R18 1 16 2
4 10.5
0 2°
°
135
135
°
180
142° R
Page18
IXA-3NNN45□□/IXA-4NNN45□□
IXA スカラロボット
IXA-3NNN45□□ バッテリー アーム長
レスアブソ 450
IXA-4NNN45□□ mm
■ 型式項目
I XA - NNN 45 - - T 2 -
シリーズ - 軸数 タイプ アーム長 上下軸ストローク - ケーブル長 - 適応コントローラー - オプション
3 3軸 NNN 標準タイプ 45 450mm 18 180mm N なし T2 XSEL-RAX/SAX 下記オプション
4 4軸 33 330mm 5L 5m 価格表参照
10L 10m
□L 長さ指定
(1m単位)
水 平 垂 横立て
直 天吊り
■ 価格表(標準価格) (1)(注 1)~(注 9)は、8 7 ページをご参照ください。
型式 標準価格 (2)加減速度は、搬送する物の質量及び移動距離、場所により最大設定値
IXA-3NNN4518 - が変化します。また、最大設定値での連続動作を行うと過負荷エラー
IXA-3NNN4533 - が出る場合があります。連続動作を行う際は加減速値を下げるか、
IXA-4NNN4518 - デューティー(目安)を参考にして加減速後に停止時間を設けてくだ
IXA-4NNN4533 - 選定上の さい。
注意 (3)モーター交換を行った時などは、アブソリュートリセットを行う必要
■ オプション価格表(標準価格) があります。回転軸 (4 軸目 ) のアブソリュートリセットには、調整ジ
グが必要となります。詳細は 9 2 ページをご参照ください。
名称 型式 参照頁 標準価格 (4)スカラロボットは 100%の速度・加速度で連続運転は出来ません。
表示灯 LED 89 - 動作可能条件は「加減速度設定の目安」ページをご確認ください。
■ 別売オプション価格表(標準価格)
名称 型式 参照頁 標準価格
ユーザーケーブル CB-IXA-USR□□□-CS 91 -
フランジ IX-FL-1 90 -
(注) 別途ご注文ください。
■ ケーブル長価格表(標準価格)
種類 ケーブル記号 3軸仕様 4軸仕様
標準タイプ 5L (5m) - -
1 0L( 10m) - -
1L (1m) ~ 4L (4m) - -
6L (6m) ~ 9L (9m) - -
1 1L (11m) - -
長さ指定 12L (12m) - -
13L (13m) - -
14L( 14m) - -
1 5L (15m) - -
(注) 下記ケーブルの合計金額となります。
[3軸仕様]モーターケーブル:3本 ・エンコーダーケーブル:3本 ・ブレーキケーブル:1本
[4軸仕様]モーターケーブル:4本 ・エンコーダーケーブル:4本 ・ブレーキケーブル:1本
17 IXA-3NNN45□□/4NNN45□□
Page19
お問合せは
0800-888-0088 IXA スカラロボット
■ メインスペック
項目 内容 内容
3軸仕様 4軸仕様 項目 3軸仕様 4軸仕様
最大可搬質量(kg()注1) 3 水平面内 ±0.01mm
合成最高速度(mm/s) 7453 位置繰返し精度 上下軸 ±0.01mm
速度 第1アーム(度/s) 610 (注4) 回転軸 - ±0.005度
(注2) 各軸最高速度 第2アーム(度/s) 610 ユーザー配線 10芯(9芯+シールド) AWG24(定格30V/MAX1A)
上下軸(mm/s) 1200 ユーザー配管 外径φ6 内径φ4 エアチューブ3本
回転軸(度/s) - 2000 (最高使用圧力0.6MPa)
押付け(N)(注3) 上限 55 アラーム表示灯(注5) オプション(アンバー色LED 小型表示灯1個 DC24V供給必要)
下限 10 ブレーキ解除スイッチ(注6) 上下軸落下防止用ブレーキ解除スイッチ
アーム長(mm) 450 先端軸 許容トルク 3.2N・m 3.2N・m
各軸アーム長(mm) 第1アーム 200 許容負荷モーメント 8.3N・m
第2アーム 250 使用周囲温度・湿度 0~40℃、20~85%RH以下(結露なきこと)
第1アーム(度) ±137 保護等級 IP20
各軸動作範囲 第2アーム(度) ±137 耐振動・耐衝撃 衝撃・振動が加わらないこと
上下軸(mm) 180/330 騒音(注7) 80dB以下
回転軸(度) - ±360 海外対応規格 CEマーク、RoHS指令
モーター種類 ACサーボモーター
第1アーム 400W
モーター容量 第2アーム 200W
上下軸 100W
回転軸 - 100W
エンコーダー種類 バッテリーレスアブソリュート
エンコーダーパルス数 16384 pulse/rev
納期 ホームページ[納期照会]に記載
■ サイクルタイム ■ 先端軸許容負荷慣性モーメント
項目 時間 軸数 先端軸許容負荷慣性モーメント
標準サイクルタイム 0.38秒 3軸仕様 2
連続サイクルタイム 0.55秒 4軸仕様 0.05 kg・m
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした 第4軸許容慣性モーメントは、スカラロボットの第4軸(回転軸)の回転中心換算の慣性
場合の所要時間を表します。 モーメント許容値です。第4軸回転中心からツール重心までのオフセット量は、下記の
2kg 搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション) 数値以内としてください。ツール重心位置が第4軸中心位置を離れた場合は、速度・加
【標準サイクルタイム】 速度を適宜落とす必要があります。負荷や動作条件によって張出し長は制限されます。
最速動作の場合の所要時間です。一般に高速性能の目安となります。
最速動作での連続動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。
水平移動
上下移動
負荷
重心
水平方向
水平方向 上下方向
120mm以下 100mm以下
IXA-3NNN45□□/4NNN45□□ 18
上下方向
Page20
IXA スカラロボット
■ 加減速度設定の目安
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティーの目安グラフを参考に停止時間を
設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの、連続運転目安範囲の加減速度設定で動作させてください。
(1)PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラ高速対応品は各搬送質量で動作することの出来る最大加減速度を100%と
しています。同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。
(2)加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3)過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティーの目安を参考に停止時間を設ける調整を行ってください。
(4)デューティー(%)=(運転時間/(運転時間+停止時間))×100
(5)ロボットを高速で水平移動させたい場合は出来るだけ上下軸を上昇端付近で動作させてください。
(6)慣性モーメント、搬送質量は許容値以下としてください。
(7)搬送負荷は第4軸回転中心の慣性モーメント、質量を示します。
(8)4軸仕様の質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動をまねきます。
(9)負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
■ PTP動作
NNN450_PTP加減速度設定の目安 NNN450_PTP動作デューティー設定の目安
100% 100%
3kg
90% 90% 90%
80% 最大設定範囲 80%
70% 2kg
70% 70%
60% 60%
連続運転目安範囲
50% 50%
40% 40%
30% 30%
20% 20%
10% 10%
0% 0%
0 1 2 3 100% 80% 60% 40% 20% 0%
搬送負荷質量(kg)
デューティー(%)
0 負荷慣性モーメント(kg・m2) 0.05
19 IXA-3NNN45□□/4NNN45□□
加減速度(%)
加減速度(%)