




SMARTSHIFTで簡単ツール交換 × pneumagiQでダブルハンド化
■SMARTSHIFT ロボットシステム
ロボットアームの水平移動だけで簡単にツール交換ができる、メカ式ロボットツールチェンジャー。
・電力やエア不要、直進運動のみで交換可能
・高精度なティーチング不要
・自動交換と手動交換の両方に対応
→ロボットの稼働率を向上させ、有効活用を実現します。
■pneumagiQ
ロボットやハンドを取り付けるだけで、簡単にダブルハンドシステムを構築できるプラグアンドプレイユニット
・必要部品を内蔵し、設計や製作が不要
・幅広いメーカーのロボット、ハンドに対応
→既存設備への導入も簡単です。
ロボットの活用をよりスマートに。
関連メディア
このカタログについて
| ドキュメント名 | ビギナーも必見!ロボットの導入効果を引き出す周辺機器 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 8.8Mb |
| 取り扱い企業 | 株式会社イマオコーポレーション (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ビギナーも必見!
ロボットの導入効果を
引き出す周辺機器
導入効果UP 導入効果UP
メカ式ツール交換 ダブルハンド構築用ユニット
スマートシフト
SMARTSHIFTロボットシステム pneumagiQ [ニューマジック]
【 お問い合わせ】
技術部 〒501-3706 岐阜県美濃市須原605
TEL 0575-32-2239 複数のツールを使って、さまざまな作業を ダブルハンドで、さらに作業時間を短縮させ
※本カタログは2025年9月に作成されました。 こなすことで導入効果UPを図ります。 P.1 導入効果UPを図ります。
※製品の価格は当社WEBサイトでご確認ください。 ~ P.21~
※本カタログに記載されている製品の仕様、外観等は予告なく変更する場合がありますのでご了承ください。最新の情報は当社WEBサイトでご確認ください。
※本カタログ掲載製品の不具合等によってお客様に生じた損害について、当社が賠償責任を負う場合、当社の責に帰すべき事由の有無にかかわらず、 SSR-IMP-001a
当社の賠償額については、いかなる場合でも、お客様がご購入し当該損害を発生させた製品の代金額を上限とさせていただきます。
※会社名、製品名、ロゴマークは、各社の商標または登録商標です。
Page2
エア・電気パススルー内蔵
あらゆるツールに対応
独自のクサビ機構でスライドして着脱 空気インターフェースを
標準装備
ロボットマスター
ロボットマスター
で ツールホルダー
ツールポケット
簡単&素早い サポート
プレート
ツール交換! ロックピンとストッパーによる 電気&空気インターフェース
独自のロック機構 もご用意
ロックピン
ストッパー
異なる作業の連続自動化へ! ツールホルダー
締結状態を維持し、ツール落下を防止
SMARTSHIFT P.3~
ロボットシステム ■製品ラインアップ
ロボットアームの水平移動だけで次々とツール交換ができ、 ロボットマスター ツールホルダー ツールポケット サポートプレート
さまざまな作業でロボットを有効活用できます。 WEBサイト
P.3 P.5
メカ式 水平移動 スライド 電 気 電 気 P.11 P.13
のため だから 動作で
交換の 交換に
駆動源に 高精度な 素早く
エア・電気 ティーチング ツール交換が …ロボットマスター …ツールホルダー P.7 P.9
…ツールポケット …サポートプレート
不要 ! 不要 ! 完了 !
手動交換専用 ロボットベース 必要な作業場所へロボットを移動・固定
ロボットマスター
(マニュアル操作)
マスターベース ムービングハンドル
協働ロボット・産業用ロボットの幅広いメーカーに対応可能
P.15
ABB Doosan KUKA Omron Techman P.17 P.20
川崎重工業 不二越(NACHI) 安川電機 など ツールホルダー
(マニュアル操作) ベースプレート
移動時の取っ手として
…ロボットマスター …マスターベース
…ツールホルダー …ベースプレート P.19
SMARTHIFTを無料で貸出しいたします ! 詳しくは イマオ 製品貸出し P.16
1 2
Page3
Sメ 付属品 Sメ
Mカ
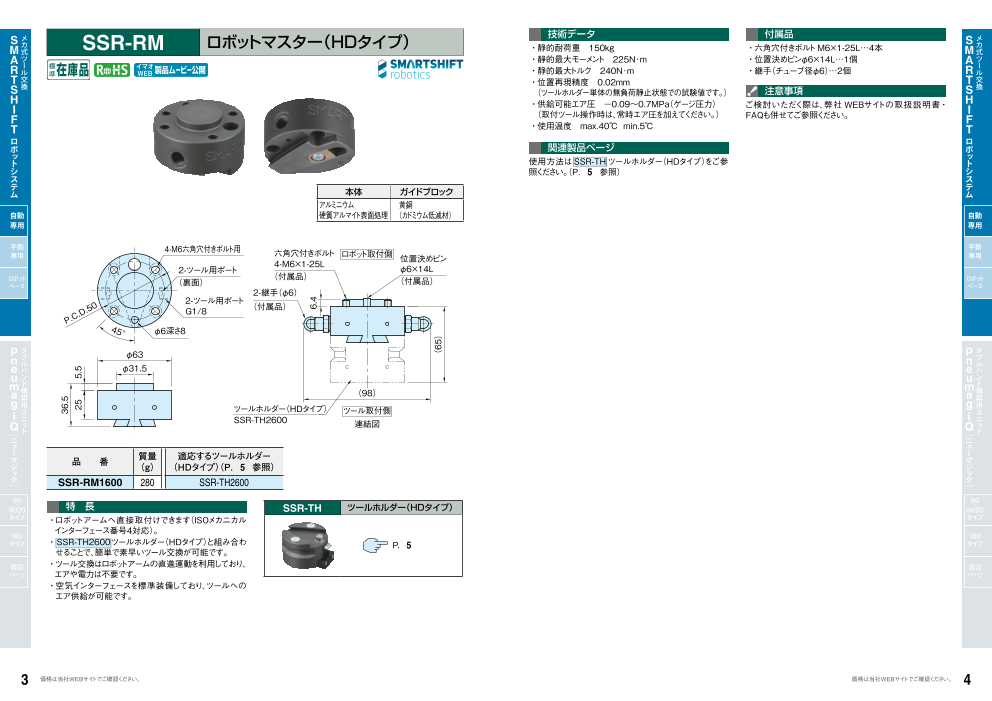
式 SSR-RM ロ ボットマスター(HDタイプ) 技術データ
・ 静的耐荷重 150kg ・ 六角穴付きボルトM6×1-25L…4本 Mカ
式
Aツ ・ 静的最大モーメント 225N・m ・ 位置決めピンφ6×14L…1個 Aツ
Rー 標
ル 準在庫品 イマオ
WEB 製品ムービー公開 ・ 静的最大トルク 240N・m ・ 継手(チューブ径φ6)…2個 Rー
ル
T交 ・ 位置再現精度 0.02mm T交
S換
(ツールホルダー単体の無負荷静止状態での試験値です。) 注意事項 S換
H H
I ・ 供給可能エア圧 -0.09~0.7MPa(ゲージ圧力) ご検討いただく際は、弊社 WEBサイトの取扱説明書・ I
F ( 取付ツール操作時は、常時エア圧を加えてください。) FAQも併せてご参照ください。 F
T ・ 使用温度 max.40℃ min.5℃ T
ロ ロ
ボ 関連製品ページ ボ
ッ ッ
ト 使用方法は SSR-THツールホルダー(HDタイプ)をご参 ト
シ 照ください。(P. 20510 参照) シ
ス ス
テ テ
ム 本体 ガイドブロック ム
アルミニウム 黄銅
自動 硬質アルマイト表面処理 (カドミウム低減材) 自動
専用 専用
手動 4-M6六角穴付きボルト用 手動
専用 六角穴付きボルト ロボット取付側 めピン 専用
2-ツール用ポート 4-M6×1-25L 位置決
φ6×14L
ロボット (裏面) (付属品) (付属品) ロボット
ベース ベース
2-継手(φ6)
0 2-ツール用ポート
G1/8 (付属品)
.D.5
P.C
45° φ6深さ8
pダ φ63 pダ
nブ nブ
e ルハ φ31.5 e ルハ
uン uン
mド mド
a 構築 (98) a 構築
g用 g用
i ユ
ツールホルダー(HDタイプ) ツール取付側
ニ i ユニ
Qッ SSR-TH2600 連結図
ト Qッ
ト
ニ ニ
ュ ュ
ー ー
マ 品 番 質量 適応するツールホルダー マ
ジ (g) (HDタイプ()P. 20510 参照) ジ
ッ ッ
ク SSR-RM1600 280 SSR-TH2600 ク
9・0 特 長 9
SSR-TH ツ ールホルダー(HDタイプ) ・0
9020 9020
タイプ ・ ロボットアームへ直接取付けできます(ISOメカニカル タイプ
インターフェース番号4対応)。
180 180
タイプ ・ SSR-TH2600ツールホルダー(HDタイプ)と組み合わ P. 20510 タイプ
せることで、簡単で素早いツール交換が可能です。
周辺 ・ ツール交換はロボットアームの直進運動を利用しており、 周辺
パーツ エアや電力は不要です。 パーツ
・ 空気インターフェースを標準装備しており、ツールへの
エア供給が可能です。
3 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 4
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
36.5
25 5.5
6.4
(65)
[ ]
[ ]
Page4
Sメ 使用例・使用方法 Sメ
Mカ SSR-TH ツ ールホルダー(HDタイプ) ■ツール交換 注)ツールを交換する際は、ツールへのエアや電気信号をOFFにしてください。 Mカ
式 式
Aツ Aツ
Rー 標
準在庫品 イ材マ質オの特性 イマオ ー
ル WPE.2B2製31品ムーWビEーB公製開品ムービー公開 Rル
T交 ピン T交
S換 ボタン S換
H
本体 ピン ツールポケット ロボットマスター H
I (HDタイプ) I
F (HDタイプ)
アルミニウム SSR-RM F
T 硬質アルマイト表面処理 SUS303 SSR-TP T
ロ (P. 21016
パッキン ロック機構 ロ
ボ 参照) ボ
ッ ッ
ト フッ素樹脂(PTFE) ポリアセタール ト
シ シ
ス サポートプレート ス
テ ロボット取付側 SSR-MS(P P. 210319 参照) テ
ム ロボットマスター(HDタイプ) ム
自動 A SSR-RM1600 溶接トーチ 自動
専用 サンダー (取付ツール例) 専用
(取付ツール例)
手動 ロック機構 手動
専用 1. ツールポケットにツールホルダー ・サポートプレートを 2. ロボットアーム先端の直進運動によりロボットマス 専用
セットします。この時ツールホルダーのピンが下がった ターとツールホルダーのクサビ溝が組み合います。
ロボット 状態であることを確認してください。 ※ ロボットマスター底面がツールポケットアーム上面よ ロボット
ベース 30 ツール取付側 り4mm離れて通過するように調整します。通過時 ベース
φ63 のロボットアーム停止は不要です。
連結図 3. そのままロボットアームが通過し、ツールポケットから
ツールホルダーが外れることでピンが上がり、同時に
4-M6深さ15 パッキン ロックが作動してツールホルダーがロボットマスター
2-ツール用ポート (エア接続部) に固定されます。
pダ G1/8 pダ
nブ
4.取り外しは2~3の逆の手順です。
nブ
e ル e ルハ ハ
uン .5深さ6 uン
mド φ31 0 ピン
mド
a 構 .D.5 a 構築 P.C 築
g用 g用
i ユ
45° φ6深さ7.5 矢視A i ユニ ニ
Qッ ボタン Qッ
ト
品 番 質量 適応するロボットマスター 適応するロボットマスター ト
ニ ニ
ュ
ー (g) (HDタイプ()P. 20308参照)(HDタイプ、M8コネクタ()P. 20712参照) ュ
■ロックの解除方法 ー
マ マ
ジ SSR-RMEF1610 ※ ツールポケットにセットした状態では、ロックが解除 ジ
ッ SSR-TH2600 277 SSR-RM1600 ピン
SSR-RMEM1611 されています。 ッ
ク ボタン ※ 手動でツールを交換する際は、ロックを解除しピンを下げ ク
9 特 長 技術データ
・ツ ール取付け部の寸法は、ISOメカニカルインターフェース ・ 静的耐荷重 150kg プレート 2 た状態でツールホルダーをロボットマスターに挿入します。
・0 9・0
9020 ボタンを放すとピンが上がり、ツールホルダーが固定されます。 9020
タイプ 番号4に対応しています。 ・ 静的最大モーメント 225N・m (取り外す場合も同様に、ロックを解除した状態で作業 タイプ
・ SSR-RM1600ロボットマスター(HDタイプ)と組み合 ・ 静的最大トルク 240N・m します。)
180 バネ 1 180
タイプ わせることで、簡単で素早いツール交換が可能です。 ・ 位置再現精度 0.02mm ピン タイプ
・ ツール交換はロボットアームの直進運動を利用しており、 (ツールホルダー単体の無負荷静止状態での試験値です。)
エアや電力は不要です。 ・ 供給可能エア圧 -0.09~0.7MPa(ゲージ圧力) ボタンロック状態 ボタンロック解除
周辺 周辺
パーツ ・ 空気インターフェースを標準装備しており、ツールへの 通常、ボタンはロックされ下がりません。
( 取付ツール操作時は、常時エア圧を加えてください。)
エア供給が可能です。 1. プレートを垂直になるまで押すとロックが解除され、ボタ パーツ
・ 使用温度 max.40℃ min.5℃ ン操作が可能になります。 ロボットマスター
SSR-RM SSR-RME 2.この状態でボタンを押し下げると、ピンが下がります。 (HDタイプ) ボタン
ロ ボットマスター(HDタイプ) ロ ボットマスター(HDタイプ、M8コネクタ) 注意事項 SSR-RM プレート
・ SSR-TPツールポケット(HDタイプ)を使用する際は、SSR-MSP
サポートプレートを併用してください。(P. 210319 参照)
P. 20308 P. 20712 ・ご検討いただく際は、弊社 WEBサイトの取扱説明書・FAQも
併せてご参照ください。
5 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 6
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
12.5
(70) 40
(65)
[ ]
[ ]
Page5
Sメ 特 長 技術データ Sメ
Mカ SSR-RME ロ ボットマスター(HDタイプ、M8コネクタ) ・ ロボットアームへ直接取付けできます(ISOメカニカル ・ 静的耐荷重 150kg Mカ
式 式
Aツ インターフェース番号4対応)。 ・ 静的最大モーメント 225N・m ツ
Rー A
標 ー
ル 準在庫品 イマオ
WEB 製品ムービー公開 ・ SSR-THEツールホルダー(HDタイプ、M8コネクタ)と ・ 静的最大トルク 240N・m Rル
T交 組み合わせることで、簡単で素早いツール交換が可能 T交
S換 ・ 位置再現精度 0.02mm
です。 ( ツールホルダー単体の無負荷静止状態での試験値です。) S換
H ★One Point ・ ツール交換はロボットアームの直進運動を利用しており、 H
I ・ 定格電流 1A
電気インターフェースを標準装備 エアや電力は不要です。 I
F ・ 定格電圧 DC24V
・ 空気および電気インターフェースを標準装備しており F
T ・ 供給可能エア圧 -0.09~0.7MPa(ゲージ圧力)
ツール交換の際、自動的に接続可能です。 T
ロ ( 取付ツール操作時は、常時エア圧を加えてください。) ロ
ボ ボ
ッ 付属品 ・ 使用温度 max.40℃ min.5℃
ッ
ト
シ ・ 六角穴付きボルトM6×1-25L…4本 関連製品ページ ト
シ
ス ・ 位置決めピンφ6×14L…1個 ス
テ 使用方法はSSR-THEツールホルダー(HDタイプ、M8コ
ム ・ 継手(チューブ径φ6)…2個 テ
ネクタ)をご参照ください。(P. 20914 参照) ム
自動 注意事項 自動
専用 ご 検討いただく際は、弊社 WEBサイトの取扱説明書・ 専用
FAQも併せてご参照ください。
手動 手動
専用 専用
本体 ガイドブロック コネクタハウジング
ロボット アルミニウム 黄銅 ロボット
ベース 硬質アルマイト表面処理 (カドミウム低減材) ABS樹脂 ベース
4-M6六角穴付きボルト用 ロボット取付側
六角穴付きボルト
2-ツール用ポート 4-M6×1-25L 位置決めピンφ6×14L
G1/8 (付属品) (付属品)
pダ 2-継手(φ6) pダ
nブ nブ
e ル 2-ツール用ポート (付属品) e ルハ ハ
uン (裏面) uン
mド mド
a 構 a 構築 築
g 4
用 5° φ6深さ8 g用
i ユ i ユニ ニ
Qッ 44 Qッ
ト ト
ニ ニ
ュ (98) ュ
ー ー
マ コネクタ φ63
φ31.5 ツールホルダー マ
ジ M8 8ピン ツール取付側 ジ
ッ (HDタイプ、M8コネクタ) ッ
ク SSR-THE 連結図 ク
9・0 9・0
9020 9020
タイプ タイプ
180 180
タイプ
品 番 コネクタ形状 質量 適応するツールホルダー 適応するツールホルダー タイプ
(g) (HDタイプ、M8コネクタ()P. 20914 参照)(HDタイプ()P. 20510 参照)
周辺 周辺
パーツ SSR-RMEF1610 メス SSR-THEM2620 パーツ
318 SSR-TH2600
SSR-RMEM1611 オス SSR-THEF2621
SSR-THE SSR-TH
ツ ールホルダー(HDタイプ、M8コネクタ) ツ ールホルダー(HDタイプ)
P. 20914 P. 20510
7 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 8
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
P.C.D.50
25 5.5 (72.4)
36.5
6.4
20
(65)
[ ]
[ ]
Page6
Sメ 使用例・使用方法
Mカ SSR-THE ツ ールホルダー(HDタイプ、M8コネクタ) Sメ
式 ■ツール交換 注)ツールを交換する際は、ツールへのエアや電気信号をOFFにしてください。 Mカ
式
Aツ Aツ
Rー 標 ピン
準在庫品 イ材マ質オの特性 イマオ ー
ル WPE.2B2製31品ムーWビEーB公製開品ムービー公開 Rル
T交 ボタン T交
S換 S換
H ロボットマスター
ツールポケット H
I (HDタイプ、M8コネクタ)
本体 ピン パッキン (HDタイプ) I
F SSR-RME
アルミニウム
硬質アルマイト表面処理 SUS303 フッ素樹脂 SSR-TP F
T (PTFE) (P. 21016 T
ロ 参照) ロ
ボ コネクタハウジング ロック機構 ボ
ッ ッ
ト ABS樹脂 ポリアセタール ト
シ サポートプレート シ
ス ス
テ ★One Point A SSR-MSP( P. 210139 参照) テ
ム ロボット取付側 ム
電気インターフェース 44
を標準装備 溶接トーチ
自動 サンダー 自動
専用 (取付ツール例)
(取付ツール例) 専用
手動 ロック機構 1. ツールポケットにツールホルダー ・サポートプレートを 2. ロボットアーム先端の直進運動により、ロボットマス 手動
専用 コネクタ セットします。この時ツールホルダーのピンが下がった ターとツールホルダーのクサビ溝が組み合います。 専用
M8 8ピン 状態であることを確認してください。 ※ ロボットマスター底面がツールポケットアーム上面よ
ロボット ロボットマスター
ベース り4mm離れて通過するように調整します。通過時 ロボット
30 ツール取付側 (HDタイプ、M8コネクタ) ベース
のロボットアーム停止は不要です。
φ63 SSR-RME
4-M6深さ15 連結図 3. そのままロボットアームが通過し、ツールポケットから
ツールホルダーが外れることでピンが上がり、同時に
2-ツール用ポート ロックが作動してツールホルダーがロボットマスター
G1/8 パッキン に固定されます。
pダ (エア接続部) 4.取り外しは2~3の逆の手順です。 pダ
nブ nブ
e ル
φ31.5深さ6 ピン e ルハ ハ
uン
.
P.C D.50 uン
mド mド
a 構 a 構築 築
g用 g用
i ユ ボタン i ユニ 45° φ6深さ7.5 矢視A ニ
Qッ Qッ
ト ト
ニ
ュ ■ロックの解除方法 ニ
ュ
ー 品 番 コネクタ形状 質量 適応するロボットマスター
(g) (HDタイプ、M8コネクタ()P. 2012参照) ピン ※ ツールポケットにセットした状態では、ロックが解除されて ー
マ
ジ 7 います。 マ
ジ
ッ ボタン
ク SSR-THEM2620 オス SSR-RMEF1610 ※ 手動でツールを交換する際は、ロックを解除しピンを下 ッ
333 2 ク
SSR-THEF2621 メス SSR-RMEM1611 プレート げた状態でツールホルダーをロボットマスターに挿入しま
9・0
す。ボタンを放すとピンが上がり、ツールホルダーが固定 9・0
9020 特 長 技術データ されます。 9020
タイプ ・ツ ール取付け部の寸法は、ISOメカニカルインターフェース ・ 静的耐荷重 150kg バネ 1 (取り外す場合も同様に、ロックを解除した状態で作業 タイプ
番号4に対応しています。 ・ 静的最大モーメント 225N・m します。) ピン
180 180
タイプ ・ SSR-RMEロボットマスター(HDタイプ、M8コネクタ)と組 ・ 静的最大トルク 240N・m ボタンロック状態 ボタンロック解除 タイプ
み合わせることで、簡単で素早いツール交換が可能です。 ・ 位置再現精度 0.02mm
・ ツール交換はロボットアームの直進運動を利用しており、 ( ツールホルダー単体の無負荷静止状態での試験値です。) 通常、ボタンはロックされ下がりません。
周辺
パーツ 1. プレートを垂直になるまで押すとロックが解 周辺
エアや電力は不要です。 ・ 定格電流 1A ロボットマスター パーツ
・ 空気および電気インターフェースを標準装備しており 除され、ボタン操作が可能になります。
・定格電圧 DC24V (HDタイプ、M8コネクタ) ボタン
ツール交換の際、自動的に接続可能です。 2. この状態でボタンを押し下げると、ピンが
・ 供給可能エア圧 -0.09~0.7MPa(ゲージ圧力) SSR-RME
下がります。 プレート
SSR-RME ロ ボットマスター(HDタイプ、M8コネクタ) ( 取付ツール操作時は、常時エア圧を加えてください。)
・ 使用温度 max.40℃ min.5℃ 注意事項
・ SSR-TPツールポケット(HDタイプ)を使用する際は、SSR-MSP
P. 20712 サポートプレートを併用してください。(P. 210139 参照)
・ご検討いただく際は、弊社 WEBサイトの取扱説明書・FAQも
併せてご参照ください。
9 価格は当社WEBサイトでご確認ください。
価格は当社WEBサイトでご確認ください。 10
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
12.5
(94.5) 40 20.5
(65)
51
[ ]
[[ ]]
Page7
Sメ SSR-TP ツ ールポケット(HDタイプ) 特 長
Mカ Sメ
・ スプリング機構によってツールホルダーのボタンが操作され、ツールの着脱と保持を同時に行います。 Mカ
式 式
Aツ ・ ロボットアーム軌道のブレを吸収補正することで、安定したツール交換を実現します。 Aツ
Rー 標
準在庫品 イ材マ質オの特性 イマオ
WPE.2B2製31品ムーWビEーB公製開品ムービー公開 ・ サポートブロックの溝が SSR-MSP サポートプレートを支えることで、ツールの重量が大きい場合や偏心している場合でも Rー
ル ル
T交 T交
S換 傾きを防止し、安定したツール交換・保持を実現します。
S換
SSR-TP ツ ーH ルポケット(HDタイプ) 技術データ 付属品 H
I I
F 本体プレート ・ 積載重量 max.50kg ・ 六角穴付き皿ボルトM6×1-40L…4本 F
標 アルミニウム ・使用温度 max.40℃ min.5℃ ・ スペーサー…1個
準在庫品 材質の特性 イマオ
P.2231 WEB 製品ムービ
T T
ロー公開 アルマイト表面処理(ブラック) ロ
ボ アーム、サポートブロック、スペーサー 使用例・使用方法 ボ
ッ ッ
ト ポリアセタール ト
シ ピン シ
ス カバー ツールホルダー ス
テ 本体プレート アルミニウム テ
ム ★One Point アルミニウム ステッカー:ポリ塩化ビニル(PVC) ム
ツールの保持と自動交ア換ルがマイ可ト表能面 処理(ブラック)
自動 アーム、サポートブロック、スペーサー 自動
専用 ポリアセタール 140 専用
手動 カバー 20 100 44.8 10 手動
専用 アルミニウム サポートプレート
★One Point ステッカー:ポリ塩化ビニル(PVC) 六角穴付き皿ボルト SSR-MSP ロボットマスター 専用
ツールの保持と自動交換が可能 ロボット 4-M6×1-40L ロボット
ベース ベース
140 (付属品)
20 100 44.8 10
1. ツールポケットにツールホルダー・サポートプレート 2. ロボットアーム先端の直進運動によりロボットマスターと
六角穴付き皿ボルト スペーサー をセットします。 ツールホルダーのクサビ溝が組み合います。
(75.4) 4-M6×1-40L (付属品) この時ツールホルダーのピンが下がった状態で さらにツールポケットから外れることでピンが上がり、
pダ 矢視A あることを確認してください。 ツールホルダーとロボットマスターが固定されます。 pダ
nブ (付属品) 詳細は各ツールホルダー「使用例・使用方法」をご覧 nブ
e ル e ルハ サポートブロック サポートプレート ください。 ハ
uン uン
mド SSR-MSP ・ SSR-THツールホルダー(HDタイプ)(P.20510 参照) mド
a 構 スペーサー (24) (P.210319 参照) ・ SSR-THEツールホルダー(HDタイプ、M8コネクタ) a 構
(75.4) 築 築
g用 g用
i ユ
(付属品) (P.20914 参照)
A (取付ツール)
矢視A ・ SSR-THツールホルダー(P.2000 参照) i ユニ ニ
Qッ 適応する ・ SSR-THE ツールホルダー(M8コネクタ()P.2004 参照) Qッ
ト ト
ニ サポートブロック 適応する ニ
ュ 品 番 質量 ツールホルダー
(g) (HDタイプ) ツールホルダー ュ
(ー24) ※ セット時には、サポートブロックの溝にサポート ー
マ (P.5 9 (P.2000、2004参照) マ
ジ 2010、2014参照) プレートがはまり込みツールの重量を支えます。 ジ
ッ ッ
ク A SSR-TH2600 SSR-TH2120 ■取付方法 ■組付寸法 ク
適応する SSR-TP3500 886 SSR-THEM2620 SSR-THEM2121 カバー(スナップフィット方式)を外し、ツールポケット
9・0ツールホルダー 適応する
品 番 質量 SSR-THEF2621 SSR-THEF2122 本体を付属の皿ボルトとスペーサーで固定します。 ツールホルダー 9・0
9020 9020
(g) (HDタイプ)タイプ ツールホルダー
注)ツールホルダーの選定につきましては、各製品ページの技術データを考慮し、選定してください。 カバー タイプ
(P.2010、2014参照)(P.2000、2004参照)
180 SSR-TH SSR-THE SSR-MSP (スナップフィット方式)
180
SSR-TH2600 タイプ SSRツ S-TSーHRル2-1ホT2ルH0 ダ ー(HDタイプ)ツ SーSルRホル-TダーH(H Dタイプ、M8コネクタ) サポートプ注レ意ー事ト項 タイプ
SSR-TP3500 886 SSR-THEM2620 SSRツ -TーHルEMホ2ル1ダ21ー(HDタイプ) ツ ールホルダー ツールホルダーに SSR-MSP サポートプレートを固定した 六角穴付き皿ボルト
SSR-THEF262周辺パ1ーツ SSR-THEF2122 P. 20510 P. 20914 状態でご使用くPだ. 21さ013い9 。 M6✕1-40L 周辺
パーツ
注)ツールホルダーの選定につきましては、各製品ページの技術データを考慮し、選定Pし. 2て01く0 ださい。 P. 2000 SSR-MSP 50
サポートプレート
SSR-TH SSR-TH SSR注-T意H事E 項
スペーサー
SSR-THE (131.5)
ツ ールホルダー(HDタイプ) ツ ールホルダー ツツ ーールルホルホダルー(ダHDータイにプ、SM8SコRネ-クMタS) Pツ サーポルーホトルプダレー(ーMト8をコ固ネ定クしタた
状態でご使用ください。 ) P. 2019
P. 2010 P. 2000 SSR-MSP P. 2014 P. 2004
サポートプレート
SSR-THE SSR-THE 11 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 12
ツ ールホルダー(HDタイプ、M8コネクタ) ツ ールホルダー(M8コネクタ) P. 2019 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
P. 2014 P. 2004
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
5.2
(176)
50 10
5.2
70
(86)
(176)
50 10
70
(86)
(53.3)
44.8
[ ]
[ ]
Page8
Sメ Sメ
Mカ SSR-MSP サポートプレート
式 Mカ
式
Aツ Aツ
Rー 標
ル 準在庫品 Rー
ル
T交 T交
S換 S換
H H
I I
F F
T T
ロ ロ
ボ ボ
ッ φ6深さ8 ★One Point ッ
ト ト
シ 75 (裏面同様) ツールポケット(HDタイプ)と
併用しツールの傾きを防止 シ
ス ス
テ テ
ム 4-φ6.3 ム
自動 2-ツール用ポート ロボット取付側 ロボットマスター 自動
専用 (口元Oリング装着) 専用
手動 手動
専用
P.C
.D.5
0 専用
ツールホルダー
ロボット ロボット
ベース 45° M8×1.25 ベース
φ31.5 2-継手(φ6)
(付属品)
pダ 位置決めピン 最新情報やCADデータダウンロード、 pダ
nブ (98) φ6×15L 製品ムービーなどはウェブサイトを nブ
e ルハ
ツール取付側 (付属品) ご覧ください e ルハ
uン uン
mド 2-ツール用ポート φ31.5 連結図 mド
a 構築 a 構築
g G1/8
用 φ63 g用
i ユニ i ユニ
Qッ 本体 Oリング
品 番 質量
ト Qッ
ト
ニ (g) アルミニウム ニ
ュ SSR-MSP2165 272 アルマイト表面処理(ブラック) ゴム ュ
ー ー
マ マ
ジ 特 長 技術データ ジ
ッ ッ
ク ク
ツ ール取付け部の寸法は、ISOメカニカルインターフェース ・ 供給可能エア圧 -0.09~0.7MPa(ゲージ圧力)
9・0
番号4に対応しています。 ・ 使用温度 max.40℃ min.5℃ 9・0
9020 9020
タイプ 使用例・使用方法 タイプ
・ SSR-TPツールポケット(HDタイプ)を使用する場合に、
180 180
タイプ ツールホルダーと固定してご使用ください。(P. 21016 参照) タイプ
・ツ ールポケット(HDタイプ)の溝にサポートプレートがはま
周辺 り込むことで、ツールを安定させ傾きを防止します。 周辺
パーツ ・ツ ールホルダーと組み合わせることで、外部配管によるエ パーツ
ア供給が可能となります。 ツールホルダー
ツールポケット
注意事項 (HDタイプ)
SSR-TPツールポケット(HDタイプ)を使用する際は、必ず SSR-TP(P. 21016 参照)
サポートプレートを併用してください。
付属品
・ 位置決めピンφ6×15L…1個
・ 継手(チューブ径φ6)…2個
13 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 14
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
5
19
33 5 75
(98)
[ ]
[ ]
Page9
Sメ
Mカ SSR-RML ロ ボットマスター(マニュアル操作) SSR-THL ツ ールホルダー(マニュアル操作) Sメ
式 Mカ
式
Aツ
Rー Aツ
標 標 材質の特性 イマオ
準在庫品 イ材マ質オの特性 イマオ イマオ
ル WPE.2B2製31品ムーWビEーB公製開品ムービー公開 準在庫品 WPE.2B2製31品ムーWビEーB公製開品ムービー公開 Rー
ル
T交 ロ T交
S換 ボットマスター
(マニュアル操作) ロボット取付側 S換
H H
I SSR-RML1500 I
F F
T T
ロ ロ
ボ ボ
ッ ッ
ト ト
シ φ31.5 ツール取付側 シ
ス φ63 連結図 ス
テ テ
ム ★One Point
手動交換専用タイプ φ6深さ8 4 ム
5°
自動 自動
専用 本体 リング 専用
4-M6六角穴付きボルト用
手動 ポリアセタール アルミニウム
アルマイト表面処理 手動
専用 専用
★One Point P.C.D.5
ロボット 手動交換専用タイプ 0 本体 ストッパー ロボット
ベース
P.C.D 4-M6深さ10 アルミニウム ベース
.50 六角穴付きボルト アルマイト表面処理 ポリアセタール
位置決めピン 4-M6×1-16L
φ6×14L
4 φ6深さ8 ロボット取付側 (付属品) 品 番 質量 適応するロボットマスター
5 (g) (P. 210520参照)
° (付属品) SSR-THL2500 120 SSR-RML1500
pダ pダ
nブ φ79.8 nブ
e ルハ φ31.5 特 長 技術データ e ルハ
uン ・ 手動交換専用です。 ・ 可搬質量 20kg uン
mド mド
a 構築 ・ ツール取付け部の寸法は、ISOメカニカルインターフェース ・ 位置再現精度 0.05mm a 構築
g用 ツールホルダー 番号4に対応しています。 ・ 許容モーメント 75N・m g用
i ユニ (マニュアル操作) ツール取付側 ・ 独自のクサビ構造により、強い保持力と高精度な位置 ・ 許容トルク 80N・m i ユニ
Qッ SSR-THL2500 連結図 決めが可能です。
ト ・ 使用温度 max.40℃ min.5℃ Qッ
ト
ニ ニ
ュ 使用例・使用方法 ュ
ー ー
マ 品 番 質量 適応するツールホルダー 1.クサビの向きを揃え、ツールホルダーをロボットマスター マ
ジ (g) (P. 2021参照) ジ
ッ 16 にスライドして挿入します。 ッ
ク ク
SSR-RML1500 180 SSR-THL2500 ロボットマスター
9・0 (マニュアル操作) 9・0
9020 特 長 技術データ SSR-RML1500 9020
タイプ タイプ
・ 手動交換専用です。 ・ 可搬質量 20kg
180 ・ ロボットアームへ直接取付けできます(ISOメカニカル ・ 位置再現精度 0.05mm 180
タイプ インターフェース番号4対応)。 ・ 許容モーメント 75N・m タイプ
・ 独自のクサビ構造により、強い保持力と高精度な位置 ・ 許容トルク 80N・m
周辺 決めが可能です。 2.リングを矢印方向に止まるまで回転させ固定します。 3.取り外す際はリングを反対方向に
・ 使用温度 max.40℃ min.5℃ 周辺
パーツ (リングは偏心しており、ストッパーに当たって止まります。) 回転させます。 パーツ
付属品 関連製品ページ リング 注)ツールの落下を防ぐため、ツール
をしっかり支えた状態でリングを
・ 六角穴付きボルトM6×1-16L…4本 使用方法はSSR-THLツールホルダー(マニュアル操作) 回転させてください。
・ 位置決めピンφ6×14L…1個 をご参照ください。(P. 210621 参照)
注意事項
ISOメカニカルインターフェース番号4以外への取付けに
関しては、お問い合わせください。 ストッパー ストッパー
固定 底面図(固定状態)
15 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 16
38.3
5.5
(34.5)
8
(64.3) 20
6
(34.5)
[ ]
[ ]
Page10
Sメ 使用例・使用方法
Mカ SSR-MB マ スターベース Sメ
Mカ
式 ノブ 式
Aツ Aツ
Rー 受注製作品 イマオ
WEB 製品ムービー公開
ベースプレート Rー
ル
T交 SSR-BP ル
T交
S換 S換
H H
I I
F F
T T
ロ ロ
ボ 1.ノブを緩めた状態でクサビの向きを揃え、 2.180°回転させます。 3.ノブをねじ込み固定します。 ボ
ッ ★One Point マスターベースをベースプレートにスライド
本体 ( 軽く当たる感覚があります。) 外す際は逆の手順で行ってください。 ッ
ト ト
シ 工具レスでロボット本体の して挿入します。 シ
ス ス
テ 取付け・取外しが可能 アルミニウム
アルマイト表面処理
ム 各設備でロボットを共有 テ
45° ム
自動 自動
専用 4-M 専用
手動 手動
専用 専用
ロボット ロボット
ベース ベース
ロボット取付側 設備A 設備B
pダ pダ
nブ 注意事項 nブ
e ル e ルハ ハ
uン 本製品は受注製作品です。納期は弊社までお問い合わせ uン
mド ください。 mド
a 構 a 構築 D
据付面側 ベースプレート 築
g用 g用
i ユ
SSR-BP
連結図 i ユニ ニ
Qッ Qッ
ト
品 番 D D1 Dp M 質量 適応するベースプレート ト
ニ
ュ (g) (P. 210924参照) ニ
ュ
ー ー
マ SSR-MB4000 129 160 110 M6×1.00 1101 SSR-BP4500 マ
ジ ジ
ッ SSR-MB4001 149 180 132
M8× 1307 SSR-BP4501 ッ
ク 1.25 ク
SSR-MB4002 190 225 170 2324 SSR-BP4502
9・0 9・0
9020 特 長 技術データ 9020
タイプ タイプ
・ SSR-BPベースプレートと組み合わせて、ロボットの据え付けに ・ 積載重量は各適応ロボットに準じます。
180 ご使用ください。 ・ 使用温度 max.40℃ min.5℃ 180
タイプ ・ ロボットの据え付けが工具レスで素早く簡単に行えます。 タイプ
・ 生産状況に合わせたロボットの柔軟な配置替えが可能
周辺 となり、生産の効率化に貢献します。 周辺
パーツ パーツ
■適応表
適応ロボット型式
マスターベース ベースプレート
UNIVERSAL ROBOTS ファナック
UR3、UR3e ー SSR-MB4000 SSR-BP4500
UR5、UR5e CRX-5iA SSR-MB4001 SSR-BP4501
UR10、UR10e、UR16e CRX-10iA、CRX-10iA/L、CRX-20iA/L SSR-MB4002 SSR-BP4502
17 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 18
(45) (max.D1)
40
12.5
(52)
[ ]
Dp
[ ]
Page11
Sメ
Mカ SSR-BP ベースプレート SSR-MH ム ービングハンドル Sメ
式 Mカ
式
Aツ
Rー Aツ
受注製作品 イマオ
WEB 製品ムービー公開 受注製作品 イ材マ質オの特性 イマオ
ル WPE.2B2製31品ムーWビEーB公製開品ムービー公開 Rー
ル
T交 T交
S換 S換
H H
I I
F F
T ★One Point T
ロ 工具レスでロボット本体の ロ
ボ ボ
ッ 取付け・取外しが可能 ッ
ト ト
シ 4 本体 シ
ス 5° アルミニウム W 本体 グリップ ス
テ テ
ム アルマイト表面処理 アルミニウム
アルマイト表面処理 ポリアセタール ム
自動 自動
専用 マスターベース 専用
SSR-MB
手動 手動
専用 Dp 専用
4-M 六角穴付き皿ボルト用 ロボット取付側 4-d
ロボット マスターベース ロボット
ベース SSR-MB ベースプレート ベース
連結図
SSR-BP
8
φ3
D
pダ 据付面側 pダ
nブ 品 番 H W Dp d 質量 適応するマスターベース ブ
e ル 連結図 (g) (P. 210722参照) nル
ハ e ハ
uン ン
mド SSR-MH4910 223.0 110 6.6 192 SSR-MB4000 u
149 ド
a 構
m構
築 品 番 D Dp M 質量 適応するマスターベース SSR-MH4911 233.5 132 260 SSR-MB4001 a
(g) (P. 2022参照) 築
g用 17 8.5
SSR-MH4912 190 274.0 170 270 SSR-MB4002 g用
i ユ i ユニ SSR-BP4500 128 110 M6×1.00 606 SSR-MB4000 ニ
Qッ
SSR-BP4501 150 132
M8× 794 SSR-MB4001 Qッ
ト 特 長 技術データ ト
ニ 1.25 ニ
ュ SSR-BP4502 190 170 1202 SSR-MB4002 ・ SSR-MBマスターベースとロボットの間に取り付け、ロボットの移動 ・ 積載重量 max.45kg ュ
ー ー
マ 時に使用します。 ・ 使用温度 max.40℃ min.5℃ マ
ジ ジ
ッ 特 長 技術データ ・ 握りやすいハンドル形状により、移動時の安定性を向上させます。 ッ
ク ・ SSR-MBマスターベースと組み合わせて、ロボットの ・ 積載重量は各適応ロボットに準じます。 ・ 4方向に取り付け可能です。 注意事項 ク
据え付けにご使用ください。 ・ 使用温度 max.40℃ min.5℃ ■適応表 本製品は受注製作品です。納期は弊社まで
9・0 お問い合わせください。 9・0
9020 ・ ロボットの据え付けが工具レスで素早く簡単に行えます。 9020
タイプ ・ 生産状況に合わせたロボットの柔軟な配置替えが可能 関連製品ページ 適応ロボット型式
品番 タイプ
となり、生産の効率化に貢献します。 使用方法はSSR-MBマスターベースの「使用例 ・使用方 UNIVERSAL ROBOTS ファナック
180 使用例・使用方法
タイプ 注意事項 法」をご参照ください。(P. 210282 参照) 180
UR3、UR3e ー SSR-MH4910 タイプ
本製品は受注製作品です。納期は弊社までお問い合わせ UR5、UR5e CRX-5iA SSR-MH4911
周辺 ください。 UR10、UR10e、UR16e CRX-10iA、CRX-10iA/L、CRX-20iA/L SSR-MH4912 周辺
パーツ パーツ
■適応表
適応ロボット型式
ベースプレート マスターベース
UNIVERSAL ROBOTS ファナック
UR3、UR3e ー SSR-BP4500 SSR-MB4000
UR5、UR5e CRX-5iA SSR-BP4501 SSR-MB4001
UR10、UR10e、UR16e CRX-10iA、CRX-10iA/L、CRX-20iA/L SSR-BP4502 SSR-MB4002
19 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 20
12.5
25
(52)
H
5
(57)
[ ]
45°
Dp
[ ]
Page12
ロボットアダプター
ツールアダプター
ツールアダプター
NEW
エア配管
簡単構築! プラグ プラグアンドプレイ! 接続は1本のみ!
アンド
プレイ ユニットだから 配管・配線もシンプル!
WEBサイト 取り付けるだけで組立完了! ユニットに接続するエア配管は1本のみ。
ワーク交換(マシン
テ ン デ ィン グ )や搬送作業の時短に! ハンドを制御する電磁弁・電気配線・ I/Oケーブルも1本接続するだけで
エア配管など必要な機能をすべて内蔵。 2つのハンドを制御できます。 I/Oケーブル
pneumagiQ [ニューマジック] P.23~
ハンドなどエンドエフェクターを取り付けるだけで、簡単にダブルハンドシステムを構築できます。 便利機能が標準搭載!
2つのハンドで一度に作業ができ、工作機械のワーク交換(マシンテンディング)やワーク搬送作業で センサコネクタ エアブローポート
ロボット作業をさらに効率化できます。 ハンドの開閉を検知するセンサを ノズルを取付けてエアブローを
ユニットに接続することができます。 行うことができます。ワークや治具
の清掃に最適です。
一般的なダブルハンド pneumagiQニューマジック
従来とは異なり設計・製作の手間、配線・配管の取り回し作業が不要 ノズル
センサコネクタ
さまざまなメーカーのロボットやハンドに取付可能
90タイプ、9020タイプ 180タイプ
21 22
Page13
Sメ 特 長
Mカ IMR-PQ90,IMR-PQ9020 ニ ューマジック 90タイプ、ニューマジック 9020タイプ Sメ
式 ・ 1本のエアホースを接続するだけで、2つの取付け面に取付けた空圧機器と1箇所のエアブローポートを操作できます。 Mカ
式
Aツ ・ ツールに取付けたセンサ配線も接続可能なため、短い配線を使用することができ、断線のリスクを低減します。 Aツ
Rー
ル 受注製作品 IP54 イマオ
WEB 製品ムービー公開 Rー
ル
T交 使用例・使用方法 T交
S換 NEW S換
H ■ロボット・空圧機器の接続 H
I I
F F
T ロボットアダプター ニューマジック 9020タイプ T
ロ IMR-RA4-PQ90 IMR-PQ9020 ロ
ボ (P. IMR-RA 参照) ボ
ッ 31 ッ
ト ト
シ ★One Point IMR-PQ90 IMR-PQ9020 シ
ス ニューマジック ス
テ コンパクトな90タイプと 本体 カバー 90タイプ テ
ム 20kg可搬の9020タイプ ム
継手(φ8) アルミニウム(A6063)ポリアミド IMR-PQ90
自動 アルマイト表面処理 (ガラス繊維強化)
センサコネクタ 専用ツールアダプター 自動
専用 M8 3ピン エアブローポート IMR-TA-3 ロボットや取付けるツールに合わせて、 専用
(P. IM3R3-TA参照) ロボットアダプターやツールアダプターを
手動 G1/4深さ12 選択します。 手動
専用 専用
■エア配管・センサ配線の接続
ロボット ロボット
ベース ベース
エア吹出し口
4-M D 2-φ6平行ピン用
1
pダ 矢視A pダ
nブ ロボット取付側 ロボットアダプター センサコネクタ
継手 nブ
e ルハ D e ルハ
uン 8-M5 4-φ3平行ピン用 uン
mド mド
a 構築 a 構I/Oコネクタ 築
g用 M8 8ピン エアホース1本を継手に接続します。 g用
i ユニ ツールに取付けたセンサをセンサコネクタへ i ユニ
Qッ 接続できます。
ト Qッ
ト
ニ ニ
ュ ツールアダプター
B(ツール取付け面2) ■ I/Oケーブルの接続 ュ
ー ー
マ マ
ジ ジ
ッ ッ
ク ツールアダプター 90° ク
(ツール取付け面1) L 2-エアポート
1 L1
9 矢視B
・0 9・0
9020 A (反対面同取付仕様) 9020
タイプ タイプ
180 180
タイプ ツール取付側 タイプ
アドオンソフトウェアを使用する場合は、
周辺 IMR-PQ90 ニューマジック 90タイプ ニューマジックとロボットのI/Oコネクタを 周辺
パーツ 接続してください。 パーツ
品 番 H D L1 W W1 W2 W3 D1 W4 M 質量 ニューマジックの制御にPLC等を使用
(g) する場合は、ニューマジックのI/Oコネクタ
IMR-PQ90 75 115 48 82 50 20 119 90 47 M6×1 深さ10 580 とPLC等を接続してください。
IMR-PQ9020 ニューマジック 9020タイプ I/Oコネクタ I/Oコネクタ
品 番 H D L1 W W1 W2 W3 D1 W4 M 質量
(g)
IMR-PQ9020 77 128 55 102 60 25 144 105 59 M8×1.25 深さ10 1100 次頁へつづく
23 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 24
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
H
15 W3
W2
W1
W
W4
[ ]
[ ]
Page14
Sメ 技術データ Sメ
Mカ
品 名 ニューマジック 90タイプ ニューマジック 9020タイプ Mカ
式 式
Aツ Aツ
Rー 品 番 IMR-PQ90 IMR-PQ9020 Rー
ル ル
T交 取付け可能数 2 T交
S換 ツールの取付け
取付け角度 90° S換
H H
I 使用流体 エア I
F 使用エア圧 -0.1~0.6MPa F
T
エ ツール ポート数 2
ア 箇所 /取付け面 T
ロ ロ
ボ 流量 85L/min(ANR) 170L/min(ANR) ボ
ッ ッ
ト ポート数 1
エアブロー 箇所 ト
シ シ
ス 流量 230L/min(ANR) ス
テ テ
ム 接続口 1
I/Oコネクタ 箇所 ム
サイズ M8 8
コネクタ ピン・メス
自動 接続口 2
センサコネクタ 箇所 4箇所 自動
専用 専用
サイズ M8 3ピン・メス
手動 電源電圧 DC24V 手動
専用 電源
消費電流 474mA 504mA 専用
ロボット インターフェース RS485
通信 ロボット
ベース プロトコル Modbus RTU ベース
使用温度 5
環 ℃~50
境 ℃
保護等級 IP54(コネクタ取付時)
ツール取付け面あたりの最大可搬質量 3.5kg 12.5kg
総可搬質量 5kg 20kg
pダ 最新情報やCADデータダウンロード、
静的許容外力 Fx pダ
nブ 製品ムービーなどはウェブサイトを nブ
e ル ご覧ください e ルハ 静的許容外力 Fy 200N 500N ハ
uン uン
mド 負荷制限 静的許容外力 Fz mド
a 構 a 構築 静的許容モーメント Mx 築
g用 g用
i ユ 静的許容モーメント My 10N・m 25N・m i ユニ ニ
Qッ Qッ
ト 静的許容モーメント Mz ト
ニ 最大慣性モーメント Ixx/Iyy/Izz 0.05kg/m2 0.5kg/m2 ニ
ュ ュ
ー ー
マ マ
ジ ジ
ッ ッ
ク ク
X軸
9・0 Y軸 9・0
9020 Z軸 9020
タイプ タイプ
180 180
タイプ 注意事項 関連製品ページ タイプ
・ 選定は最大可搬質量、総可搬質量、静的許容モーメント ・IMR-RAロボットアダプター(P. IM3R1-RA 参照)
周辺 周辺
パーツ を考慮願います。 ・IMR-TA 専用ツールアダプター( P. IM3R3-TA参照) パーツ
・ ツール取付け面2箇所の最大可搬質量を合計した値は、 ・ IMR-TA-FS 汎用ツールアダプター、汎用ツールアダプ
総可搬質量を超えないようにしてください。 ター用ブランク材(P. IM3R-T7A-FS 参照)
・ 外力と最大可搬質量の合計が、静的許容外力を超え ・IMR-I/O-C I/Oケーブル( P. IM3R-0I/O-C参照)
ないようにしてください。
・ ニューマジックの制御にはアドオンソフト又はPLCなど
の制御装置や通信機器をご使用ください。通信には
Modbus RTU(RS485)を使用します。詳しい使用方法
は取扱説明書をご確認ください。
・ センサコネクタにはPNPセンサを接続してください。
25 価格は当社WEBサイトでご確認ください。 26
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
[ ]
[ ]
Page15
Sメ 特 長
Mカ IMR-PQ180 ニ ューマジック 180タイプ Sメ
・ 1本のエアホースを接続するだけで、2つの取付け面に取付けた空圧機器と2箇所のエアブローポートを操作できます。 Mカ
式 式
Aツ ・ツールに取付けたセンサ配線も接続可能なため、短い配線を使用することができ、断線のリスクを低減します。 Aツ
Rー 受注製作品 IP54 イマオ
WEB 製品ムービー公開 Rー
ル ル
T交 使用例・使用方法 T交
S換 S換
H NEW ■ロボット・空圧機器の接続 H
I ニューマジック
F ロボットアダプター I
180タイプ F
T IMR-RA4-PQ180 IMR-PQ180 T
ロ (P. IM3R1-RA 参照) ロ
ボ
ッ ニューマジック ボ
ッ
ト 180タイプ
シ 専用ツール ト
ス IMR-PQ180 アダプター ロボットや取付けるツールに合 シ
ス
テ IMR-TA-3 わせて、ロボットアダプターや テ
ム ★One Point 本体 ツール取付け面 (P. IM3R3-TA参照) ツールアダプターを選択します。 ム
自動 リーチが長く狭い機内での作業に最適 ポリウレタン樹脂 アルミニウム(A3003) 自動
専用 アルマイト表面処理 専用
手動 継手(φ8) 手動
専用 453 専用
■エア配管・センサ配線の接続
ロボット ロボット
ベース ベース
エアホース1本を継手に接続し
pダ 2-φ6平行ピン用 ます。 pダ
nブ ツールに取付けたセンサをセン nブ
e ル e ルハ ロボット取付側
uン ロボットアダプター サコネクタへ接続できます。 ハ
mド 継手 センサコネクタ uン
113.5 mド
a 構 a 構築 築
g用 ■ I/Oケーブルの接続 g用
i ユ i ユニ ニ
Qッ Qッ
ト ト
ニ ニ
ュ 91 ツールアダプター ツールアダプター ュ
ー ー
マ (ツール取付け面1) (ツール取付け面2) マ
ジ ツール取付側 ジ
ッ 2×2-センサコネクタ I/Oコネクタ M8 8ピン ッ
ク M8 3ピン ク
9・0 2-エアブローポート 4-M6六角穴付きボルト用 9・0
9020 9020
タイプ G1/4 深さ12 2-エア吹出し口 タイプ
2×8-M5
180 180
タイプ タイプ
2×4-φ3平行ピン用 I/Oコネクタ I/Oコネクタ
周辺 2×2-エアポート 周辺
パーツ アドオンソフトウェアを使用する場合は、ニュー パーツ
4
45 5° 45 マジックとロボットのI/Oコネクタを接続してくだ
200 200 さい。
ニューマジックの制御にPLC等を使用する場合
は、ニューマジックのI/OコネクタとPLC等を接
続してください。
品 番 質量
(g)
IMR-PQ180 870 次頁へつづく
27 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 28
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
66
37.5 56
P.C.D.76
[ ]
[ ]
Page16
Sメ 技術データ
品 名 ニューマジック 180タイプ IMR-I/O-C I/O ケーブル Sメ
Mカ Mカ
式 式
Aツ Aツ
Rー 品 番 IMR-PQ180 標
取付け可能数 2 準在庫品 Rー
ル ル
T交 T交
S換 ツールの取付け
取付け角度 180° S換
H NEW H
I 使用流体 エア M8 8ピン メス M8 8ピン オス I
F 使用エア圧 -0.1~0.6MPa F
T ポート数 2
エア ツール 箇所 /取付け面 T
ロ ロ
ボ 流量 85L/min(ANR) ボ
ッ ッ
ト ポート数 2
エアブロー 箇所 ト
シ シ
ス 流量 230L/min(ANR) 200 ス
テ テ
ム 接続口 1
I/Oコネクタ 箇所 (257) ム
サイズ M8 8
コネクタ ピン・メス
自動 接続口 4 IMR-I/O-C-0.2
センサコネクタ 箇所 IMR-I/O-C-0.2 自動
専用 専用
サイズ M8 3ピン・メス
電源電圧 M8 8ピン オス
手動 DC24V 手動
専用 電源 消費電流 600mA 専用
ロボット 通信 インターフェース RS485 ロボット
ベース プロトコル Modbus RTU ベース
使用温度 5
環 ℃~50
境 ℃ 5000
保護等級 IP54(コネクタ取付時)
ツール取付け面あたりの最大可搬質量 3kg IMR-I/O-C-5 IMR-I/O-C-5
総可搬質量 5kg
pダ pダ
nブ 静的許容外力 Fx 150N nブ
e ル コネクタハウジング ケーブル被覆
静的許容外力 Fy 50N 品 番 質量 e ルハ ハ
uン (g) ポリプロピレン ポリウレタン uン
mド 負荷制限 静的許容外力 Fz 50N
静的許容モーメント Mx IMR-I/O-C-0.2 20 mド
a 構 a 構築 築
g 5N・m
用
静的許容モーメント My IMR-I/O-C-5 170 g用
i ユ 5N・m i ユニ ニ
Qッ Qッ
ト 静的許容モーメント Mz 10N・m 特 長 関連製品ページ ト
ニ 最大慣性モーメント Ixx/Iyy/Izz 0.03kg/m2 ニ
ュ ニ ューマジックとロボットの通信接続に使用します。 ・ IMR-PQ90 IMR-PQ9020 ニューマジック 90タイプ、 ュ
ー ニューマジック 9020タイプ(P. IMR-P2Q90,IM3R-PQ9020参照) ー
マ 27 マ
ジ 注意事項 ・IMR-PQ180 ニューマジック 180タイプ(P. IMR-PQ180参照) ジ
ッ ッ
ク ロボットの稼働時、I/Oケーブルの引っかかり、引っ張りがない
ようにしてください。接触不良、断線、接続部が破損する場合 技術データ ク
9 があります。 ケ ーブルの最小曲げ半径
・0 9・0
9020 X軸 ・ 固定 :25.5mm 9020
タイプ Y軸 ・ 可動 :51mm タイプ
180 Z軸
180
タイプ タイプ
注意事項 関連製品ページ
周辺 31 周辺
パーツ ・選 定は最大可搬質量、総可搬質量、静的許容モーメント ・IMR-RAロボットアダプター(P. IMR-RA 参照) パーツ
を考慮願います。 ・ IMR-TA 専用ツールアダプター(P. IM3R3-TA参照)
・ツ ール取付け面2箇所の最大可搬質量を合計した値は、 ・ IMR-TA-FS 汎用ツールアダプター、汎用ツールアダプター
総可搬質量を超えないようにしてください。 用ブランク材(P. IM3R-T7A-FS 参照)
・ 外力と最大可搬質量の合計が、静的許容外力を超え ・IMR-I/O-C I/Oケーブル( P. IM3R-I0/O-C参照)
ないようにしてください。
・ニ ューマジックの制御にはアドオンソフト又はPLCなどの制御装置
や通信機器をご使用ください。通信にはModbus RTU(RS485)
を使用します。詳しい使用方法は取扱説明書をご確認ください。
・センサコネクタにはPNPセンサを接続してください。
29 価格は当社WEBサイトでご確認ください。 30
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
[ ]
[ ]
Page17
Sメ IMR-RA ロ ボットアダプター IMR-RA-PQ90※太字が標準品、細字が受注製作品 Sメ
Mカ
式 Mカ
式
Aツ Aツ
Rー 標 品 番 ISOメカニカル 1
インターフェース番号 M1 d1 Dp D
(h8)D2 H H 量 適用する
1 H 質
2 (g) ニューマジック
ル 準在庫品 Rー
ル
T交 d1平行ピン用 IMR-RA2-PQ90 2 M5 5 31.5 20.0 42 14.5 3.0 140 T交
S換 NEW 45 2.5
4-M S換
H 1六角穴付きボルト用 ° IMR-RA3-PQ90 3 40.0 25.0 52 150 IMR-PQ90
M6 6 16.0 4.5 H
I IMR-RA4-PQ90 4 50.0 31.5 64 2.0 160 I
F Dp F
T IMR-RA-PQ9020※太字が標準品、細字が受注製作品 T
ロ ロ
ボ ボ
ッ 2-φ6平行ピン用 品 番 ISOメカニカル 量 適用する
インターフェース番号 M1 d1 Dp D1 質
(H8)(g) ニューマジック ッ
ト ト
シ IMR-RA2-PQ9020 2 M5 5 31.5 40 460 シ
ス ス
テ 4-φ6.6 105 H1 H2
IMR-RA3-PQ9020 3 M6 6 40.0 50 440 IMR-PQ9020 テ
ム H ム
IMR-RA4-PQ9020 4 寸法図参照 460
自動 IMR-RA2-PQ90 IMR-RA3-PQ90 IMR-RA4-PQ90 自動
専用 IMR-RA4-PQ90 d1平行ピン用 IMR-RA-PQ180※太字が標準品、細字が受注製作品 専用
4 10
手動 4-M1六角穴付きボルト用 5° 6
品 番 ISOメカニカル る 手動
専用 インターフェース番号 M1 d1 Dp D1 質量 適用す
(h8)(g) ニューマジック 専用
Dp IMR-RA2-PQ180 2 M5 5 31.5 20.0 180
ロボット ロボット
ベース IMR-RA3-PQ180 3 40.0 25.0 190 IMR-PQ180 ベース
M6 6
IMR-RA4-PQ180 4 50.0 31.5 200
2-φ6平行ピン用 付属品
IMR-RA4-PQ9020
4-φ9 123 18 品 番 ボルト/ピン ロボットへの取付け用 ニューマジックへの取付け用
pダ
IMR-RA2-PQ9020 IMR-RA3-PQ9020 六角穴付きボルト M5×0.8-10L 4個 M6×1 -16L 4個 pダ
nブ IMR-RA2-PQ90
φ6平行ピン用 平行ピン φ nブ
e ルハ 5×14L 1個 φ6×16L 2個 e ルハ
uン 4 六角穴付きボルト M6×1 -10L 4個 M6×1 -16L 4個 uン
mド
4-M6六角穴付きボルト用 5° 6 10 IMR-RA3-PQ90 mド
a 構築 平行ピン φ6×16L 1個 φ6×16L 2個 a 構築
g用
P.C 六角穴付きボルト M6×1 -10L 4個 M6×1 -16L 4個 g用
i ユニ .D.50 IMR-RA4-PQ90 平行ピン φ i ユ
6×16L 1個 φ6×16L 2個 ニ
Qッ
ト Qッ
IMR-RA4-PQ180 六角穴付きボルト ト
ニ M5×0.8-12L 4個 M8×1.25-20L 4個
IMR-RA2-PQ9020 ニ
ュ 平行ピン φ5×14L 1個 φ6×16L 2個 ュ
ー ー
マ 2-φ6平行ピン用 六角穴付きボルト M6×1 -12L 4個 M8×1.25-20L 4個 マ
ジ IMR-RA3-PQ9020 ジ
ッ 平行ピン φ ッ
ク 6×16L 1個 φ6×16L 2個 ク
4-φ9 123 18 六角穴付きボルト M6×1 -12L 4個 M8×1.25-20L 4個
9・0 IMR-RA4-PQ9020
IMR-RA4-PQ9020 平行ピン φ 9
6×16L 1個 φ6×16L 2個 ・0
9020 9020
タイプ 六角穴付きボルト M5×0.8-10L 4個 M6×1 -60L 4個 タイプ
d1平行ピン用 45° IMR-RA2-PQ180
180 平行ピン φ5×14L 1個 φ6×16L 2個
4-M 180
タイプ 1 六角穴付きボルト用 六角穴付きボルト M6×1 -10L 4個 M6×1 -60L 4個 タイプ
IMR-RA3-PQ180
周辺 Dp 平行ピン φ6×16L 1個 φ6×16L 2個 周辺
パーツ 六角穴付きボルト M6×1 -10L 4個 M6×1 -60L 4個 パーツ
IMR-RA4-PQ180
★One Point 平行ピン φ6×16L 1個 φ6×16L 2個
さまざまなロボットへの
取付けに対応 注意事項 関連製品ページ
4-M6
5 ・ 細字品番は受注製作品です。納期は弊社までお問い ・ IMR-PQ90 IMR-PQ9020 ニューマジック 90タイプ、
本体 2-φ6平行ピン用 合わせください。 ニューマジック 9020タイプ(P. IMR-2PQ90,3IMR-PQ9020参照)
16 ・ 取付けるロボットのメカニカルインターフェース番号に合 ・ IMR-PQ180 ニューマジック 180タイプ(P. IM2R-P7Q180参照)
アルミニウム(A3003)
アルマイト表面処理 IMR-RA2-PQ180 IMR-RA3-PQ180 IMR-RA4-PQ180 わせて品番を選択してください。
31 価格は当社WEBサイトでご確認ください。 32
84
84
67
φ90 φ90 φ80 D2
D1 φ63H8 D1 D1
[ ]
[ ]
Page18
Sメ IMR-TA 専用ツールアダプター 2-φ4H7 30° 3-M5 2-φ3平行ピン用 2-エアポート
Mカ Sメ
Mカ
式 式
Aツ 2-エアポート Aツ
Rー 受注製作品 Rー
ル ル
T交 T交
S換 NEW 本体 S換
H P.C H
I アルミニウム(A3003) .
アルマイト表面処理 4-M5六角穴付き皿ボルト用 D.
F 5 I
6 10 F
T Oリング T
ロ IMR-TA-3 IMR-TA-7 IMR-TA-8 ニトリルゴム IMR-TA-6 ロ
ボ ボ
ッ (NBR) φ55
2-エアポート 4-M5 2-φ3平行ピン用 4-エアポート 注1) ッ
ト 2-φ3H8 4-エアポート
シ M3×0.5 ト
12.5 12.5 1.8
2-エアポート 注1) 2-φ3平行ピン用 シ
ス ス
テ M3×0.5 テ
ム Y ム
X Y X X 2-六角穴付き止めネジ
X
自動 Y M3×0.5-5L
Y 自動
専用 2-六角穴付き止めネジ 4-M5六角穴付き (埋め栓) 専用
2-M4×0.7 P.C. M3×0.5-5L 皿ボルト用
手動 D 10
2-M5六角穴付き皿ボルト用 .44 (埋め栓) 手動
専用 38 10
IMR-TA-1 専用
2-φ5H7深さ7 51.5
2-φ4H8
ロボット 4-エアポート IMR-TA-7 ロボット
ベース 28 2-φ3平行ピン用
2-エアポート P.C 注1) 4-エアポート A ベース
.D.52 M3×0.5 4-φ10 M5深さ6 φ6H7 45° 6
4-M6
X Y X 2-φ3平行ピン用
Y
2-六角穴付き止めネジ 16
pダ 2-M5×0.8 M3×0.5-5L
矢視A 2-エアポート pダ
nブ 10
2-M5六角穴付き皿ボルト用 (埋め栓) nブ
e ル e ルハ
uン IMR-TA-2 4-M5六角穴付きボルト用 ハ
16 uン
mド
a 構
3-M1 1.8 2-保護プラグ mド
a 構築 2-エアポート D 2-エアポート 築
g IMR-TA-8
用 p ※ 保護プラグは、ツールに合わせて g用
i ユ i ユニ 反対側にも取付けできます。 ニ
Qッ Qッ
ト ト
ニ 注1)ツールの取付け方向に合わせて、エアポートを塞ぐ埋め栓(六角穴付き止めネジ)の位置をXまたはYに変更できます。 ニ
ュ ュ
ー ー
マ 3-M5六角穴付き皿ボルト用 d 10 2-φ3平行ピン用 品 番 適用ツールメーカー 適応ツール D Dp M1 d D 質量 マ
ジ 1 ジ
ッ (g) ッ
ク IMR-TA-3 IMR-TA-4 IMR-TA-1 MHS2-32D-X56,MHS 4-32D-X56 ク
寸法図参照 70
2-φ4H7 IMR-TA-2 MHS2-40D-X56,MHS 4-40D-X56 80
9・0
4-M4 IMR-TA-3 SMC MHS3-32D-X56,MHSL3-32D-X56 55 44 M4×0.7 φ3H7深さ8 34(-0.00 9・0
9020 -0.04) 9020
タイプ 70
2-六角穴付き止めネジ IMR-TA-4 MHS3-40D-X56,MHSL3-40D-X56 65 53 M5×0.8深さ7.5 φ4H8深さ6 42(-0.00
-0.04) タイプ
180 M3×0.5-5L IMR-TA-5 MHF2-16D2R 190 180
タイプ 12.6 2.5 (埋め栓) IMR-TA-6 北川鉄工所 NTS307 90
IMR-TA-7 NTS210 寸法図参照 タイプ
110
周辺 2-φ3平行ピン用
M5保護プラグ X Y IMR-TA-8 メカニカルインターフェース番号4 120 周辺
パーツ
Y X パーツ
注意事項 関連製品ページ
4-M5六角穴付き
皿ボルト用 本製品は受注製作品です。納期は弊社までお問い合わせ ・ IMR-PQ90 IMR-PQ9020 ニューマジック 90タイプ、
4-エアポート 注1) ください。 ニューマジック 9020タイプ( P. IMR-2PQ90,I3MR-PQ9020参照)
M3×0.5 ・ IMR-PQ180 ニューマジック 180タイプ( P. IM2R-P7Q180参照)
2-継手(φ4) 52 10
※継手と保護プラグは、ツールに合わせて IMR-TA-5 次頁へつづく
33 位置を入れ替えて取付けできます。 価格は当社WEBサイトでご確認ください。 34
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811 製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
144
130
108
36
23
22.5° 20° 20°
22.5°
44 38
53 46
D1 34 0
-0.04
D φ62 φ56
6.5 66 20°
38
φ31.5H7
81.5 φ66
φ63
[ ]
0
.D.5
P.C
20°
60°
20° 20° 20°
[ ]
Page19
Sメ 付属品 Sメ
Mカ Mカ
式
品 番 ボルト/ピン/Oリング ニューマジックへの ツールへの 式
Aツ 取付け用 取付け用 Aツ
Rー Rー
ル ル
T交 六角穴付き皿ボルト M5×0.8-16L 2個 - T交
S換
IMR-TA-1 平行ピン φ3×10L 2個 - S換
H H
I Oリング φ4×1.5 2個 φ4×1.5 2個 I
F 六角穴付き皿ボルト M5×0.8-16L 2個 - F
T IMR-TA-2 平行ピン φ3×10L 2個 - T
ロ ロ
ボ Oリング φ4×1.5 2個 φ4×1.5 2個 ボ
ッ ッ
ト 六角穴付き皿ボルト M5×0.8-16L 3個 - ト
シ シ
ス IMR-TA-3 平行ピン φ3×10L 2個 - ス
テ テ
ム Oリング φ4×1.5 2個 φ4×1.5 2個 ム
六角穴付き皿ボルト M5×0.8-16L 3個 -
自動 IMR-TA-4 平行ピン φ3×10L 2個 - 自動
専用 専用
Oリング φ4×1.5 2個 φ4×1.5 2個
手動 六角穴付き皿ボルト M5×0.8-16L 4個 - 手動
専用 IMR-TA-5 平行ピン φ3×10L 2個 - 専用
ロボット Oリング φ3×1.0 2個 - ロボット
ベース 六角穴付き皿ボルト M5×0.8-16L 4個 - ベース
IMR-TA-6 平行ピン φ3×10L 2個 -
Oリング φ4×1.5 2個 φ3×1.0 2個
六角穴付き皿ボルト M5×0.8-16L 4個 -
IMR-TA-7 平行ピン φ3×10L 2個 -
pダ 最新情報やCADデータダウンロード、
Oリング φ4×1.5 2個 φ4×1.0 2個 pダ
nブ
e ル
製品ムービーなどはウェブサイトを nブ
六角穴付きボルト M5×0.8-12L 4個 - ご覧ください e ルハ ハ
uン
mド uン
IMR-TA-8 平行ピン φ3×10L 2個 - mド
a 構 Oリング φ4×1.5 2個 - a 構築 築
g用 g用
i ユ 注)品番によっては使用しない部品も同梱されています。 i ユニ ニ
Qッ Qッ
ト ト
ニ ニ
ュ ュ
ー ー
マ マ
ジ ジ
ッ ッ
ク ク
9・0 9・0
9020 9020
タイプ タイプ
180 180
タイプ タイプ
周辺 周辺
パーツ パーツ
35 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 36
製品情報 TEL.0575-32-2239 在庫・納期 TEL.0575-28-4811
[ ]
[ ]
Page20
■汎用ツールアダプター ■汎用ツールアダプター用ブランク材
Sメ
Mカ IMR-TA-FS 汎用ツールアダプター、汎用ツールアダプター用ブランク材 Sメ
式 品 番 質量
(g) 品 番 L 質量 Mカ
式
Aツ (g)
Rー Aツ
標
ル 準在庫品 Rー
ル
T交 IMR-TA-FS 110 IMR-TA-FS60 60 110 T交
S換 NEW IMR-TA-FS80 80 190 S換
H H
I 使用例・使用方法 付属品 I
F F
T ・ IMR-TA-FSを使用する際は、IMR-TA-FS60 又はIMR-TA-FS80 ・ IMR-TA-FS: T
ロ と組み合わせてご使用ください。 六角穴付き皿ボルト M5×0.8-16L…4個 ロ
ボ ・ IMR-TA-FS60又はIMR-TA-FS80にお客様にてツー 平行ピン φ3(h8)×10L…2個 ボ
ッ ッ
ト ル取付用の加工をしてご使用ください。 Oリング φ4×1.5…2個 ト
シ ・ IMR-TA-FS60 IMR-TA-FS80: シ
ス 六角穴付きボルト M5×0.8-12L…4個 ス
テ テ
ム IMR-TA-FS IMR-TA-FS60 ニューマジック 平行ピン φ4(h8)×16L…2個
(汎用ツールアダプター) (汎用ツールアダプター用 180タイプ ム
ブランク材) IMR-PQ180
自動 注意事項 自動
専用 汎用ツールアダプター 品番によっては使用しない部品も同梱されています。 専用
★One Point IMR-TA-FS
手動 本体 Oリング 関連製品ページ 手動
専用 さまざまなツールの取付けに対応 アルミニウム(A3003) ニトリルゴム 汎用ツールアダプター用 ・ IMR-PQ90 IMR-PQ9020 ニューマジック 90タイプ、 専用
アルマイト表面処理 (NBR) ブランク材 ニューマジック 9020タイプ(P. IMR-P2Q90,I3MR-PQ9020参照)
ロボット IMR-TA-FS60
ベース ・ IMR-PQ180ニューマジック 180タイプ(P. IM2R-P7Q180参照) ロボット
ベース
4-M5
4-φ5.5 M5保護プラグ 4-M5六角穴付き皿ボルト用
12 2-φ3平行ピン用
特 長
pダ お 客様にて加工することで、様々なツールの取付けが可能 pダ
nブ です。 nブ
e ルハ e ルハ
uン uン
mド mド
a 構築 a 構築
g用 g用
i ユニ i ユニ
Qッ
ト 2-エアポート Qッ
ト
ニ 24 ニ
ュ
2-継手(φ4) 36 2-φ4H8深さ8 ュ
ー ー
マ マ
ジ 48 IMR-TA-FS ジ
ッ ッ
ク (汎用ツールアダプター) ク
9 ※継手と保護プラグは、ツールに合わせて
・0 9・0
9020 位置を入れ替えて取付けできます。 4-M5六角穴付きボルト用 9020
タイプ タイプ
180 180
タイプ タイプ
周辺 周辺
パーツ パーツ
2-φ4H8深さ8 36 10
48
IMR-TA-FS60 IMR-TA-FS80
(汎用ツールアダプター用ブランク材)
37 価格は当社WEBサイトでご確認ください。 価格は当社WEBサイトでご確認ください。 38
12.6 □60 2.5
48
□L
48
[ ]
[ ]