




※本資料は、2026年1月14日に開催された「ロボット技術開発の現状の総括と今後の展望 ― 産業用ロボットからサービスロボットまで、自律化・協働へ広がる進化」の講演資料です。
本資料では、急速に進化するロボティクス分野において、技術トレンドと産業構造の変化を踏まえながら、製造業における活用の現在地と今後の可能性を解説します。人手不足や生産性向上の要請が高まる中で、ロボットは単なる自動化手段から、より高度な判断や柔軟な作業を担う存在へと進化しつつあります。一方で、導入・運用におけるコストや適用領域の見極めなど、実装に向けた課題も依然として存在しています。
本資料では、こうしたロボティクスの進展を支える技術動向やユースケースを整理しながら、「どこまでが実現できていて、どこからがまだ難しいのか」という現在地を明らかにします。さらに、自社の現場に適用するうえでの着眼点や、技術選定・投資判断に必要な視点を提示。断片的な情報では捉えきれないロボティクスの全体像を把握し、実践的な意思決定につなげるための内容となっています。
このカタログについて
| ドキュメント名 | ロボット技術の最新動向は?第一人者が徹底解説! |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| ファイルサイズ | 8Mb |
| 取り扱い企業 | ストックマーク株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
StockMarkロボット開発の最新動向セミナーセミナー
(2026.1.14 オンライン)
ロボット技術開発の現状の総括と
今後の展望
東京大学 国際高等研究所 東京カレッジ
淺間 一
http://www.robot.t.u-tokyo.ac.jp/asamalab/
asama@robot.t.u-tokyo.ac.jp
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 1
Page2
RT(Robot Technology)による
新産業創造
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 2
Page3
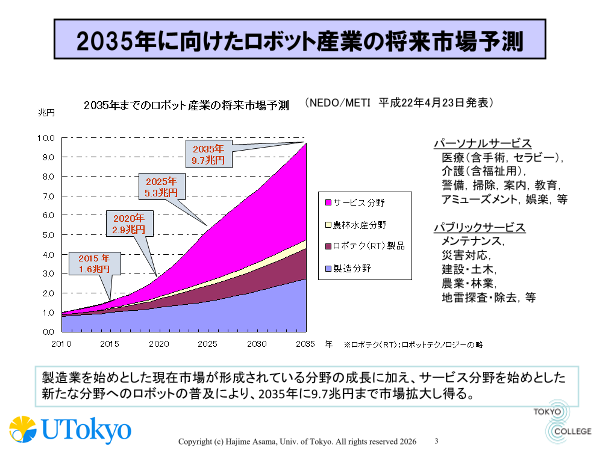
2035年に向けたロボット産業の将来市場予測
(NEDO/METI 平成22年4月23日発表)
パーソナルサービス
医療(含手術,セラビー),
介護(含福祉用),
警備,掃除,案内,教育,
アミューズメント,娯楽,等
パブリックサービス
メンテナンス,
災害対応,
建設・土木,
農業・林業,
地雷探査・除去,等
製造業を始めとした現在市場が形成されている分野の成長に加え、サービス分野を始めとした
新たな分野へのロボットの普及により、2035年に9.7兆円まで市場拡大し得る。
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 3
Page4
ロボットの市場予測
• 2024年のロボティクス市場規模は日本で28億ドル(
2025年11月為替レートで約4400億円)、世界で532
~969億ドル(2025年11月為替レートで約8兆3300
億~15兆1700億円)に拡大(IMARCグループ「日
本のロボティクス市場規模、シェア、動向、予測製品
タイプ別、地域別、2025-2033年」)
• ロボット全体の世界市場は2035年に約28兆円に迫
る規模に達する(NEDO技術戦略研究センター,
2018)
NEDO「TSC Foresight」 Vol.29、https://www.nedo.go.jp/content/100884651.pdf
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 4
Page5
ロボット産業の世界の状況
産業用ロボット市場の動向,三井住友銀行,2018.2
l 産業用ロボット保有台数
中国>日本>韓国>米国>ドイツ
l ロボット密度
韓国>シンガポール>中国>ドイツ>日本
l 稼働台数
中国>日本>韓国>米国
l 出荷台数
中国>日本>米国>韓国>ドイツ
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 5
Page6
ロボティクス関連技術の近年の進歩
l 移動ロボットナビゲーション
l SLAM (Simultaneous Localization and Mapping)
l 3次元環境認識
l SfM (Structure from Motion)
l ドローン(デュアルユース)
l ソフトロボティクス
l 自律分散/群ロボット(Swarm)
l IoT, 環境知能化,etc.
l VR/AR/遠隔操作
l 機械学習,深層学習、生成AI(基盤モデル)
l ヒューマノイドロボット
l フィジカルAI,身体性AI
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 6
Page7
ロボットに対する
社会的ニーズの変化
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 7
Page8
社会的状況の変化
• 持続可能性
– 気候変動対策,脱炭素(Carbon Neutral)
– Circular Economy
• 少子高齢化,労働力不足
• DEI (Diversity, Equity, Inclusion),働き方改革
• ニーズの変化
• 災害リスク,地政学リスク
• 世代交代
• 技術の進歩
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 8
Page9
ロボットの社会的ニーズ
(ChatGPTによる)
1. 高齢化社会への対応
介護ロボット,会話・感情支援ロボット
2. 労働力不足の補完
産業ロボット,サービスロボット
3. 教育や発達支援
教育支援ロボット,発達障害支援ロボット
4. 災害対応・危険作業
レスキューロボット,危険作業ロボット
5. 家庭生活の支援
家事ロボット,ペット型ロボット
6. 社会的つながりの維持
コミュニケーションロボット,マスコット型ロボット
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 9
Page10
ロボット技術導入の目的
• 人に代わる:省人化(人と同等か人より上)
• コストダウン(経済性)-人に比べて
• 生産性向上(経済性)-人に比べて
• 高度化-人に比べて
• 労働力不足解消(経営的)
• 人のできないことをする
• 人共存(ユーザとの共存,第三者との共存)
• 高度化,質の向上
• 人の能力の増幅
• 人の労働環境改善,負担軽減,満足の向上
• 雇用を奪わない
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 10
Page11
人共存ロボティクスが求められる場面
(開発者やユーザとのインタラクション)
• 協働ロボット
• アシストスーツ
• 手術ロボット
• 介護支援(介護者,被介護者)
• セラピーロボット
• 遠隔操作
• 自動運転
• サービスロボット
• VR,他
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 11
Page12
人共存ロボットに求められる機能
• ユーザとの共存
• ユーザとの物理的インタラクション
• 力学的支援,共同作業,安全,I/F
• ユーザとの情報的インタラクション
• 情報的支援,コミュニケーション,可視化,I/F
• 役割分担
• 第三者(公衆)との共存
• 安全・非干渉(邪魔にならない)
• 衝突回避
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 12
Page13
ロボットの社会実装の課題
• 課題
–技術的課題
–社会的課題
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 13
Page14
ロボットの社会実装の課題
• 課題
–技術的課題
–社会的課題
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 14
Page15
フィジカルAIの社会実装の課題
• 課題
–技術的課題
• 物理的知能
– 身体を有し,現実の物理世界で動作するAI
– Physical AI, Embodied AI, AI Robot
• 多様な要求や無限定な環境への適応性
– 自律分散化/環境知能化
– 学習,発達,進化
–社会的課題
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 15
Page16
身体知能/フィジカルAI
• ヒューマノイドロボットの身体にAIを搭載すればよい?
– Ill-defined, Ill-structured,未知環境への適応的応答
– ノイズ,実時間性
– ブラックボックス化,説明可能性,過学習
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 16
Page17
AIを搭載したロボット?
• AI・深層学習・機械学習
– データ駆動型(過去の経験に基づく学習)
– いわゆる人間の認識や意思決定の計算機化(大脳皮質
などの機能)
– 人間の運動制御の機能(小脳,基底核,脳幹,脊髄など
の機能)?
• 運動制御に必要な知能=身体あっての知能
– 人間の脳を鳥や猫や魚に載せて機能するか
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 17
Page18
身体知能/フィジカルAI
• ヒューマノイドロボットの身体にAIを搭載すればよい?
– Ill-defined, Ill-structured,未知環境への適応的応答
– ノイズ,実時間性
– ブラックボックス化,説明可能性,過学習
• 身体構造や制御システムのデザイン(身体性)
– 受動歩行
– 消費エネルギーやコミュニケー
ション・コストなどの制約条件
– 移動知,アフォーダンス,環境と
の相互作用のダイナミクス McGeerの受動歩行機(1991)
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 18
Page19
フィジカルAIの社会実装の課題
• 課題
–技術的課題
• 物理的知能
– 身体を有し,現実の物理世界で動作するAI
– Physical AI, Embodied AI, AI Robot
• 多様な要求や無限定な環境への適応性
– 学習,発達,進化
– 自律分散化/環境知能化(空間知能化)
–社会的課題
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 19
Page20
自律分散型ロボットシステムのユースケース
災害対応
Copyright (c) Hajime Asama, Univ. of Tokyo. All rights reserved 2026 20