


このカタログについて
| ドキュメント名 | 株式会社Doog 協働運搬ロボット サウザージャイアント4モータ版 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 417.2Kb |
| 取り扱い企業 | 株式会社Doog (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
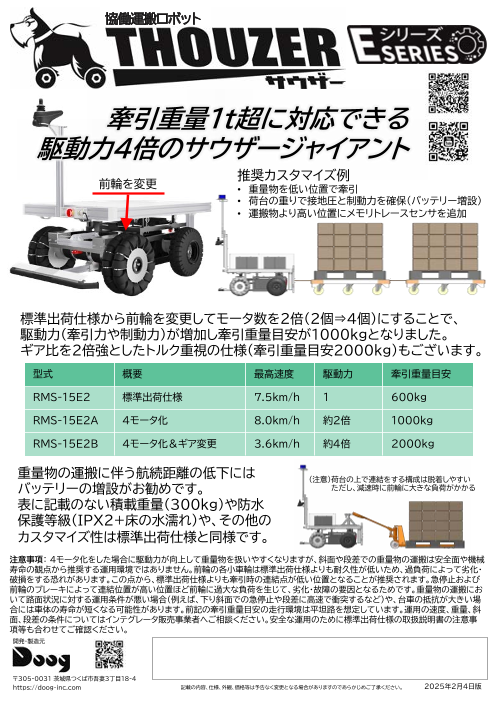
牽引重量1t超に対応できる
駆動力4倍のサウザージャイアント
推奨カスタマイズ例
前輪を変更 • 重量物を低い位置で牽引
• 荷台の重りで接地圧と制動力を確保(バッテリー増設)
• 運搬物より高い位置にメモリトレースセンサを追加
標準出荷仕様から前輪を変更してモータ数を2倍(2個⇒4個)にすることで、
駆動力(牽引力や制動力)が増加し牽引重量目安が1000kgとなりました。
ギア比を2倍強としたトルク重視の仕様(牽引重量目安2000kg)もございます。
型式 概要 最高速度 駆動力 牽引重量目安
RMS-15E2 標準出荷仕様 7.5km/h 1 600kg
RMS-15E2A 4モータ化 8.0km/h 約2倍 1000kg
RMS-15E2B 4モータ化&ギア変更 3.6km/h 約4倍 2000kg
重量物の運搬に伴う航続距離の低下には
(注意)荷台の上で連結をする構成は脱着しやすい
バッテリーの増設がお勧めです。 ただし、減速時に前輪に大きな負荷がかかる
表に記載のない積載重量(300kg)や防水
保護等級(IPX2+床の水濡れ)や、その他の
カスタマイズ性は標準出荷仕様と同様です。
注意事項: 4モータ化をした場合に駆動力が向上して重量物を扱いやすくなりますが、斜面や段差での重量物の運搬は安全面や機械
寿命の観点から推奨する運用環境ではありません。前輪の各小車輪は標準出荷仕様よりも耐久性が低いため、過負荷によって劣化・
破損をする恐れがあります。この点から、標準出荷仕様よりも牽引時の連結点が低い位置となることが推奨されます。急停止および
前輪のブレーキによって連結位置が高い位置ほど前輪に過大な負荷を生じて、劣化・故障の要因となるためです。重量物の運搬にお
いて路面状況に対する運用条件が悪い場合(例えば、下り斜面での急停止や段差に高速で衝突するなど)や、台車の抵抗が大きい場
合には車体の寿命が短くなる可能性があります。前記の牽引重量目安の走行環境は平坦路を想定しています。運用の速度、重量、斜
面、段差の条件についてはインテグレータ販売事業者へご相談ください。安全な運用のために標準出荷仕様の取扱説明書の注意事
項等も合わせてご確認ください。
開発・製造元
〒305-0031 茨城県つくば市吾妻3丁目18-4
https://doog-inc.com 記載の内容、仕様、外観、価格等は予告なく変更となる場合がありますのであらかじめご了承ください。 2025年2月4日版