


• フィジカルAI実現への鍵『Sim to Real』から始まる未来
• 研究開発向けのドュアルアームシステム
• コネクタ自動嵌合ソリューション
このカタログについて
| ドキュメント名 | 生産現場のAI活用 |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| ファイルサイズ | 2.6Mb |
| 取り扱い企業 | リョーサン菱洋株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
生産現場のAI活用
• フィジカルAI実現への鍵『Sim to Real』から始まる未来
• 研究開発向けのドュアルアームシステム
• コネクタ自動嵌合ソリューション
\その他テクノロジー情報はこちら/
リョーサンテクラボ
Page2
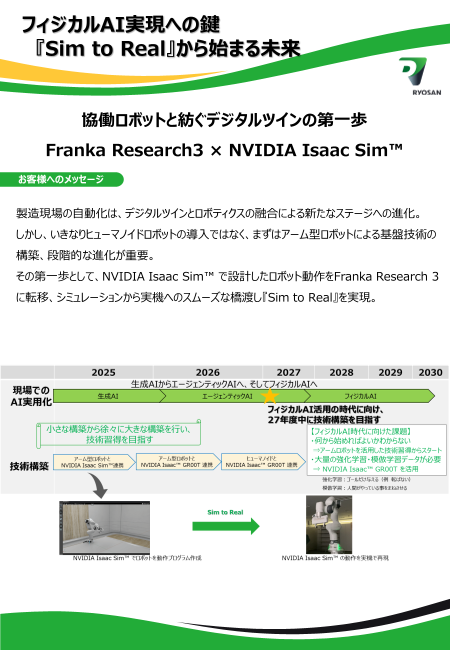
フィジカルAI実現への鍵
『Sim to Real』から始まる未来
協働ロボットと紡ぐデジタルツインの第一歩
Franka Research3 × NVIDIA Isaac Sim™
お客様へのメッセージ
製造現場の自動化は、デジタルツインとロボティクスの融合による新たなステージへの進化。
しかし、いきなりヒューマノイドロボットの導入ではなく、まずはアーム型ロボットによる基盤技術の
構築、段階的な進化が重要。
その第一歩として、NVIDIA Isaac Sim™ で設計したロボット動作をFranka Research 3
に転移、シミュレーションから実機へのスムーズな橋渡し『Sim to Real』を実現。
Page3
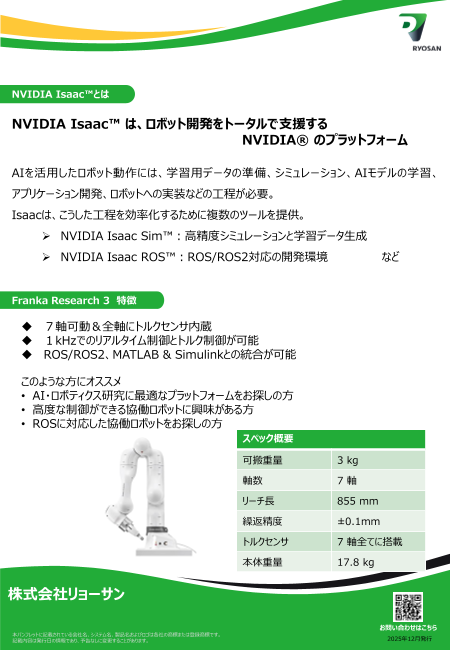
NVIDIA Isaac™とは
NVIDIA Isaac™ は、ロボット開発をトータルで支援する
NVIDIA® のプラットフォーム
AIを活用したロボット動作には、学習用データの準備、シミュレーション、AIモデルの学習、
アプリケーション開発、ロボットへの実装などの工程が必要。
Isaacは、こうした工程を効率化するために複数のツールを提供。
➢ NVIDIA Isaac Sim™:高精度シミュレーションと学習データ生成
➢ NVIDIA Isaac ROS™:ROS/ROS2対応の開発環境 など
Franka Research 3 特徴
◆ 7軸可動&全軸にトルクセンサ内蔵
◆ 1kHzでのリアルタイム制御とトルク制御が可能
◆ ROS/ROS2、MATLAB & Simulinkとの統合が可能
このような方にオススメ
• AI・ロボティクス研究に最適なプラットフォームをお探しの方
• 高度な制御ができる協働ロボットに興味がある方
• ROSに対応した協働ロボットをお探しの方
スペック概要
可搬重量 3 kg
軸数 7 軸
リーチ長 855 mm
繰返精度 ±0.1mm
トルクセンサ 7 軸全てに搭載
本体重量 17.8 kg
株式会社リョーサン
お問い合わせはこちら
本パンフレットに記載されている会社名、システム名、製品名およびロゴは各社の商標または登録商標です。
記載内容は発行日の情報であり、予告なしに変更することがあります。 2025年12月発行
Page4
研究開発向けのデュアルアームシステム
Dual-arm system:FR3 Duo
フィジカルAIがロボットを自律へと導く
Franka Research 3 × NVIDIA Isaac™ GR00T
お客様へのメッセージ
• 双腕ロボット「FR3 DUO」に NVIDIA Isaac™ GR00T N1.5 を実装したAI推論デモ
• カメラ入力や状況の手掛かりから目標を推論しロボットが自律的に作業をこなすことが可能
• 多様なタスクへの応用力や適応力を具現化した「フィジカルAI」のユースケース
Isaac™ GR00Tとは
• Isaac™ GR00Tとは、NVIDIA®が開発するヒューマノイドロボット向けのオープン基盤モデル
• フィジカルAIを実現するためのプラットフォームとしてロボットに高度な認知・推論能力を付加
• 言語や画像を含むマルチモーダル入力を取り込み多様な環境下でマニピュレーションタスクを実行
FR3 Duo の魅力
• 2台の Franka Research 3 を 1つのマウントに統合した
研究開発向けのデュアルアーム リファレンスシステム
• 制御・マニピュレーション・模倣学習に最適化され
「すぐ使える」プリインテグレーション済みセットとしてご提供
* FR3 アームx2
* コントロールボックス
* グリッパー
* カメラ
* ROS 2 + Franka Control Interface(FCI)
Page5
FRANKA ROBOTICS / Franka Research 3 の紹介
会社概要
FRANKA ROBOTIICS(フランカ・ロボティクス)は、優れた性能と普遍的な使いやすさ
を備えた斬新なロボティクスプラットフォーム技術を創造するドイツのメーカー
協働ロボットを軸に、未来志向の研究者、ビジネスに変革をもたらす人々、生産的活動に
従事される方に特化した製品を提供
Franka Research 3 特徴
• 7軸可動&全軸にトルクセンサ内蔵
• 1kHzでのリアルタイム制御とトルク制御が可能
• ROS/ROS2、MATLAB & Simulinkとの統合が可能
スペック概要
可搬重量 3 kg
軸数 7 軸
リーチ長 855 mm
繰返精度 ±0.1mm
トルクセンサ 7 軸全てに搭載
本体重量 17.8 kg
このような方にオススメ
• AI・ロボティクス研究に最適なプラットフォームをお探しの方
• 高度な制御ができる協働ロボットに興味がある方 FRANKA ROBOTICS
YouTubeチャンネル
• ROSに対応した協働ロボットをお探しの方
株式会社リョーサン
お問い合わせはこちら
本パンフレットに記載されている会社名、システム名、製品名およびロゴは各社の商標または登録商標です。
記載内容は発行日の情報であり、予告なしに変更することがあります。 2025年12月発行
Page6
コネクタ自動篏合ソリューション
(Dobot + I-PEX/ES-Gripper
+ Cambrian/ Cambrianビジョンシステム)
これまで自動化が難しかったコネクタ嵌合作業の自動化を実現
お客様へのメッセージ
様々な分野/作業で自動化が進む中、コネクタ嵌合作業は自動化が困難であり人手に
頼っているのが現状。一方で、人手作業による嵌合ミスや半嵌合不良等も発生しており
自動化ソリューションへの期待は高まっている。今回、DOBOT協働ロボットにコネクタ自
動嵌合用グリッパ(ES-Gripper)とAIビジョンシステム(Cambrian)を実装すること
でこれらの課題を解決し、コネクタ嵌合作業の自動化を実現。
ソリューション概要
DOBOT協働ロボットCRAシリーズ、ES-Gripper、Cambrianビジョンシステムを使用した
システムでのご提供。バラ積みされたコネクターをCambrianビジョンシステムでピッキングし、
ES-Gripperで嵌合時の傾きや位置ズレを吸収。
+ +
CRAシリーズ ES-Gripper Cambrianビジョンシステム
(DOBOT) (I-PEX) (Cambrian)
Page7
ES-Gripper特徴
静電容量型トルクセンサを内蔵することで、コネクタ挿入開始時、嵌合完了時、引っ張り
確認時のトルクを検知し、トレーサビリティの一部として活用可能。
【特徴】
➢ 嵌合時の傾きや位置ズレの吸収(アライメント補正)
➢ 多種コネクタに対応可能
(爪を変更することで様々なコネクタタイプに対応可能)
Cambrianビジョンシステム特徴
Cambrianは、AI学習をベースとした3Dビジョンシステム。照明を用いないためハレーション
が起きにくく透明体・反射体・薄物ワークの認識が可能。
【特徴】
➢ 照明レスなのに外乱光に強い
➢ 撮像~座標出力まで約0.3秒
➢ 透明体・反射体・薄物・公差の大きいワークにも対応
外乱光に強いため工場レイアウト
変更へも容易に対応可能
株式会社リョーサン
お問い合わせはこちら
本パンフレットに記載されている会社名、システム名、製品名およびロゴは各社の商標または登録商標です。 2025年12月発行
記載内容は発行日の情報であり、予告なしに変更することがあります。