



モータの基礎知識をつけたい方向けのカタログです。
このカタログについて
| ドキュメント名 | 図と写真で理解するモータ入門~構造・特性、制御の仕方から実践まで~ |
|---|---|
| ドキュメント種別 | ホワイトペーパー |
| ファイルサイズ | 1.1Mb |
| 取り扱い企業 | リョーサン菱洋株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
図と写真で理解するモータ入門
~構造・特性、制御の仕方から実践まで~
Page2
モータとは
モータとは電気エネルギーを力学的エネルギーに変換する電動機のことで、世界の電力消費量のう
ち約50%がモータで消費されており、私たちの生活や産業において欠かせない存在です。モータに
は多くの種類がありますが、駆動電源の種類で分類すると「DC(直流)モータ」と「AC(交流)
モータ」に分類できます。ACモータは長寿命が求められる産業機械やロボットなどに、DCモータは静
音性やコストが重視される民生機器に多く使用されています
2
Page3
モータとは
◆モータの基本構造
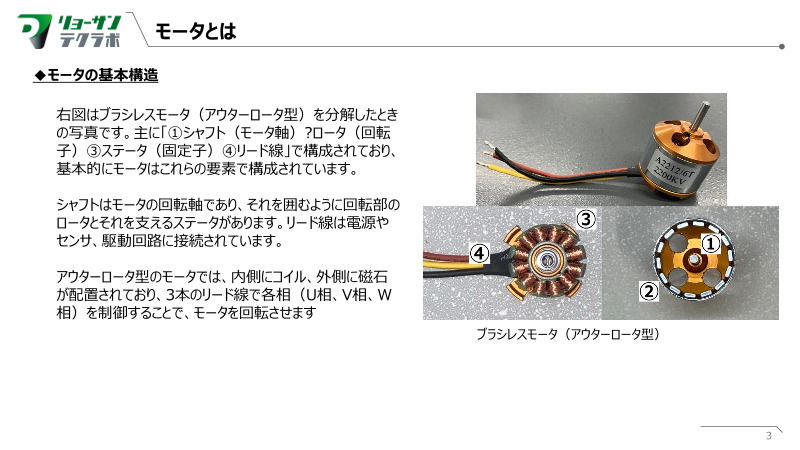
右図はブラシレスモータ(アウターロータ型)を分解したとき
の写真です。主に「①シャフト(モータ軸)?ロータ(回転
子)③ステータ(固定子)④リード線」で構成されており、
基本的にモータはこれらの要素で構成されています。
シャフトはモータの回転軸であり、それを囲むように回転部の
ロータとそれを支えるステータがあります。リード線は電源や
センサ、駆動回路に接続されています。
アウターロータ型のモータでは、内側にコイル、外側に磁石
が配置されており、3本のリード線で各相(U相、V相、W
相)を制御することで、モータを回転させます
ブラシレスモータ(アウターロータ型)
3
Page4
モータとは
モータの回転数や周波数との関係に影響を与える重要な
要素に極数があります。極数はモータ内のN極とS極の合
計数で、極数が多いほど精密な制御が可能になる一方、
コストは高くなる傾向にあります。極対数はN極とS極のセッ
ト数で、極数を2で割った値です。
回転数[rpm]は「60 × 電源周波数[Hz]÷ 極対数」
で求めることが可能です。たとえば、極対数が2で電源周波
数が60Hzの場合、回転数は「60 × 60 ÷ 2 =
1800[rpm] 」になります。
このように、モータの回転数は周波数に比例し、極数(
極数のイメージ(インナーロータ型) 正確には極対数)に反比例します。 なお、rpmとは
"revolutions per minute" の略で、1分間あたりの回
転数を表します。
4
Page5
モータとは
◆モータの出力や損失造
次は出力特性について説明します。この情報はモータの初
期検討時や最終評価時に必要で、初期検討では目的の
製品に必要なトルクと回転数を基にモータを選定し、評価
時には指定した回転数と実際のトルクを比較し確認するた
めに使用します。トルク測定にはパワーメーターを使用し、
特性表との一致を確認します。
また、製品に必要なトルクと回転数からモータの出力[W]
を「トルク[Nm]× 2π × 回転数[rpm]÷ 60」で求めるこ
とが可能です。たとえば、トルク100Nmで回転数200rpm
の場合、「100 × 2π × 200 ÷ 60 = 約2094[W]」と
なります。
トルクとは、回転軸周りの力(モーメント)を意味し、モー トルクと回転数の関係(T - N特性)
タの回転力そのものです。また、回転数はrpmだけでなく、
rad/sで表すこともあります。
5
Page6
モータとは
◆モータの出力や損失造
モータ選定では、モータの効率も重要な指標になります。モー
タの効率とは、入力電力[W]に対する出力[W]の割合のこと
を指します。理想は効率[%]が100%になることですが、実際
には電気抵抗や摩擦のため、一部の電力は熱に変換され、
捨てられます。損失とは、この熱のことを指します。
これらの関係性から損失[W]は「入力電力 ー 出力」、効
率[%]は「(出力÷入力電力)× 100」で算出できます。
左記では、入力が100Wで出力時に90Wとなっており、
10Wの損失が発生しているため、モータの効率は90%になり
ます。
モータの損失には銅損や鉄損、機械損など、複数の要因が
ありますが、効率の低いモータは運用コストが大きくなることは
もちろん、発熱量が大きく対策のためにモータ自体が大型にな
損失のイメージ ることも多いです。
6
Page7
モータを制御するには
先程までの説明で、モータの構造や基礎についてはある程度理解して頂けたかと思います。
ここでは、例としてブラシレスDCモータの制御方法について解説します。
◆駆動回路について
ブラシレスDCモータでは、回転速度は印加電圧、負荷トルクの関係で決まり、モータに与える電圧を変えることで回転速
度を制御できます。下記に基本的なモータのブロックを記載しています。一般的な説明として位置センサの情報からモータ
位置を検出し、速度検出器にて速度を検出します。その後、速度指令値と検出値を速度制御器で比較して、電流指令
値を出力します。次に抵抗を介して検出した電流値と電流指令値を比較して電圧指令を駆動回路に出力します。この
駆動回路はインバータと呼ばれており、ここで電圧や電流を調節し、モータに出力することで速度制御を行います
駆動回路(インバータ)とモータの関係
7
Page8
もっと詳しく知りたい方へ
弊社テクラボサイトの『図と写真で理解するモータ入門~構造・特性、制御の仕方から実践まで~』をご覧ください。
登録不要でサイト観覧できます!! INDEX
1.モータとは
➢ 1-1. モータの基本構造
➢ 1-2. モータの出力や損失
2.モータを制御するには
➢ 2-1. 駆動回路について
➢ 2-2. マイコンから制御する方法
3.モータの制御を実演
➢ 3-1. デモ環境の説明
➢ 3-2. オートチューニングとモータの動作確認
4.まとめ
クリックで対象ページに移動 8