



このカタログについて
| ドキュメント名 | 三次元動作計測 ~1mm以下の精度でロボット制御~ |
|---|---|
| ドキュメント種別 | 事例紹介 |
| ファイルサイズ | 578.5Kb |
| 取り扱い企業 | 株式会社スパイス (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
三次元動作計測
事例集一挙公
開
OptiTrack製品 正規日本代理店
Page2
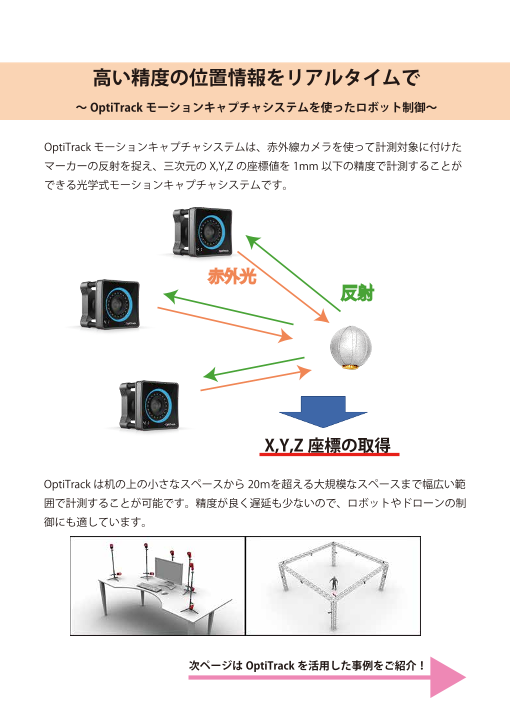
高い精度の位置情報をリアルタイムで
~OptiTrack モーションキャプチャシステムを使ったロボット制御~
OptiTrack モーションキャプチャシステムは、赤外線カメラを使って計測対象に付けた
マーカーの反射を捉え、三次元の X,Y,Z の座標値を 1mm以下の精度で計測することが
できる光学式モーションキャプチャシステムです。
赤外光
反射
X,Y,Z 座標の取得
OptiTrack は机の上の小さなスペースから 20mを超える大規模なスペースまで幅広い範
囲で計測することが可能です。精度が良く遅延も少ないので、ロボットやドローンの制
御にも適しています。
次ページはOptiTrack を活用した事例をご紹介!
Page3
【OptiTrack を使用した活用事例】
東京工業大学
工学院 システム制御系 三平研究室
三平研究室では非線形システムに対する新たな制御理論の構築とその応用を研究されています。
上記動画ではドローンが倒れそうになる棒をバランスをとって倒れないように制御をしていま
す。マーカーをドローンと棒に貼り付けており、複数台のカメラをドローンの周りに設置して
計測をしています。OptiTrack は位置精度が良いのと遅延が少ないのが特徴ですので、ドローン
の位置をリアルタイムに計測し、さらにその情報を元に制御プログラムからドローンに移動の
指示を出しています。
OptiTrack で ドローンへ
(X,Y,Z 座標取得) v
制御プログラム
v フィードバック
制御プログラムを使ってドローンに載せた棒が倒れない!
Page4
名古屋工業大学
機械工学科 佐野・田中研究室
ロボティクスラボ では人を含んだ現象を探究し,人の能力を活用する技術を開発しています。
人の歩行・走行,触覚をメインテーマとし,科学的な研究から工学的応用,社会実装を見据
えた研究まで行っています。
OptiTrack を使用してロボットの脚がどのくらい開いているのか、三次元的に計測を行いなが
ら、その計測データを別の制御用プログラムにリアルタイムストリーミングし、ロボットを上
方に持ち上げるタイミングを制御していました。最終的に得られたデータを解析し、制御を介
さず、よりシンプルに走行する実験に成功されています。
OptiTrack で
走行ロボットへ
(X,Y,Z 座標取得) 制御プログラム
v v フィードバック
計測したデータを解析して、制御を介さず動きに適した自立走行が可能に!
Page5
その着想がMOCAPで広がる
株式会社スパイス www.mocap.jp
〒107-0052 東京都港区赤坂2-17-46 グローヴビル
Tel:03-5549-6157 E-mail : sales@spice-group.jp