



●特長・機能
・リルート機能
・タスクの受け渡し機能
・車体・天板の同時回転機能
・円弧動作機能
・トポロジカルマップ方式
・APIによる緊急停止機能
・遠隔一斉操作機能
・ブラインドリフト時の棚方向制御機能
●独自開発力
・スクラッチ型WCS
・3Dシミュレーション
・AIエージェントによるトラブル復旧支援
●仕様(スペック・外形寸法図)
▶詳細はカタログをダウンロードしてご覧いただくか、お気軽にお問合せください。
このカタログについて
| ドキュメント名 | 自律走行搬送ロボット StellaDrive |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 1.9Mb |
| 取り扱い企業 | 株式会社Phoxter (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
www.phoxter.co.jp/
新商品
搬送自動化のすべての答えがここに
StellaDrive
株式会社 Phoxter
本社 : 〒560-0082 大阪府豊中市新千里東町1-5-3 千里朝日阪急ビル20F TEL:06-6155-6744 / FAX:06-6155-6745 自 律 走 行 搬 送ロボット
※製品画像はイメージCGです
StellaDrive
Page2
INDEX
製 品
Concept 03
特長・機能 リルート機能 05
タスクの受け渡し機能 06
日 本 の 現 場 で 車体・天板の同時回転機能 07
円弧動作機能 08
本 当 に 使 える トポロジカルマップ方式 09
APIによる緊急停止機能 10
搬 送 ロ ボット。 遠隔一斉操作機能 11
ブラインドリフト時の棚方向制御機能 12
独自開発力 スクラッチ型WCS 13
ローコード型WCS 13
P h ox t e r C o r p o r a t i o n
�Dシミュレーション 14
AIエージェントによるトラブル復旧支援 14
仕 様
ス ペ ッ ク 15・16
外形寸法図 17
01 Phox ter Corporat ion Phox ter Corporat ion 02
StellaDrive
StellaDrive
Page3
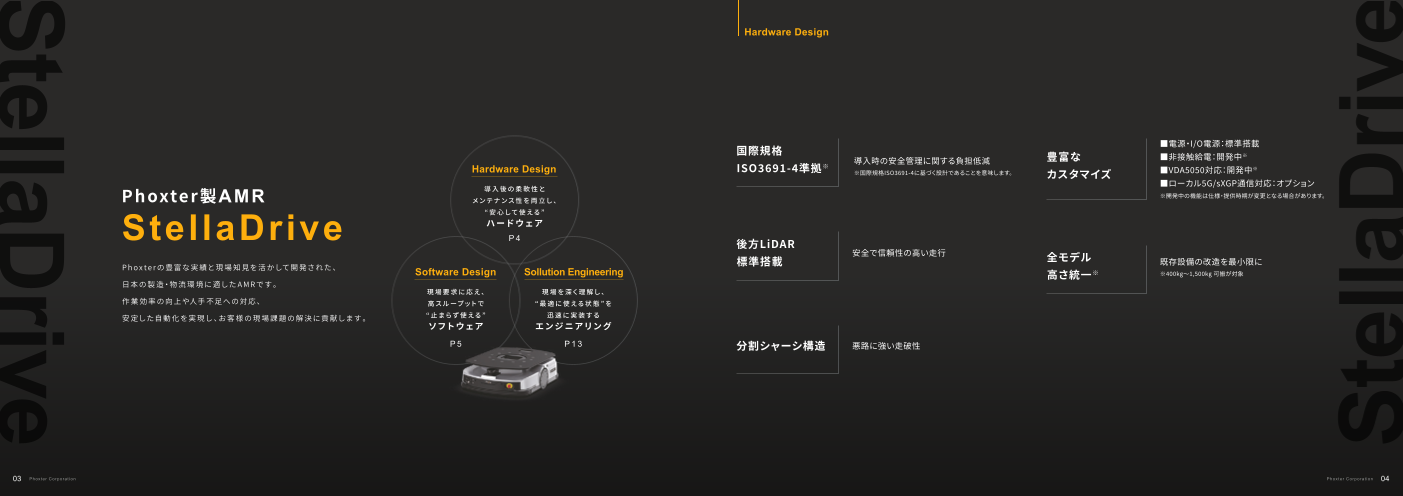
Hardware Design
■電源・I/O電源:標準搭載
国際規格
導入時の安全管理に関する負担低減 豊富な ■非接触給電:開発中※
Hardware Design ISO����-�準拠※
※国際規格ISO����-�に基づく設計であることを意味します。 カスタマイズ ■VDA����対応:開発中※
■ローカル�G/sXGP通信対応:オプション
P h oxte r 製AMR 導 入 後 の 柔 軟 性 と
※開発中の機能は仕様・提供時期が変更となる場合があります。
メンテナンス 性 を 両 立し、
“ 安 心して 使 える ”
StellaDrive ハ ード ウェア
P 4 後方LiDAR
安全で信頼性の高い走行
P h o x t e r の 豊富 な 実 績と現 場 知 見を 活 かして開 発され た 、 標準搭載 全モデル 既存設備の改造を最小限に
Software Design Sollution Engineering 高さ統一※ ※���kg~�,���kg 可搬が対象
日本 の 製 造・物 流 環 境 に 適した A M R です 。
現 場 要 求 に 応 え 、 現 場 を 深く理 解し、
作 業 効 率 の 向 上 や人手 不足 へ の 対 応 、 高 スル ープットで “ 最 適 に 使 える 状 態 ” を
安 定した自 動 化を実 現し 、お 客 様 の 現 場 課 題 の 解 決 に 貢 献します 。 “ 止 まらず 使 える ” 迅 速 に 実 装 する
ソフトウェア エ ン ジ ニ アリン グ
P 5 P 1 3 分割シャーシ構造 悪路に強い走破性
03 Phox ter Corporat ion Phox ter Corporat ion 04
StellaDriveStellaDrive
Page4
Software Design Software Design
01 リルート機能
オペレ ー タによる 復 旧 操 作 を不 要とする自 動 回 避 型リル ート 02 タスクの受け渡し機能
A M R の 動 作 を 最 適 化 するた め 、� . � 秒ごとに 状 態 を 監 視しタスクを再 割り当て
課 題( Before) Start 課 題( Before) Start
障害物を検 知した際、オペレータによる復旧操作が必要となるため、 一 度 割り当てられ た タスクは 完 了まで 固 定されるため 、
作業負担が大きくなる傾向がある。 Goal 状 況 変 化 に 柔 軟 に 対 応 できな い ケース が ある 。 Goal
特に�Dコード間では自己位置が更新されず、 また 、異 常 停止 時 にはタスクが 滞 留してしまい 、全 体 効 率 の 低下 を招く 。
リルートができないまま停止してしまうケースが発生する。
・AMR稼働率の低下
・エラーリセット操作 主な影響
主な影響 障害物を検知 ・スループットの低下
・�Dコードの再読み込み その場でエラー停止 異常が発生
解 決( After) Start 解 決( After) Start
障害物検知
自己位置を�.�秒単位で更新し続けることで、あらゆる位置で障害物を検知・回避する。 � . � 秒ごとに A M R の 状 態 を 監 視し 、
オペレータの介入なしで自動リルートを実行し、安定稼働を維持する。 最 適 な A M Rへリアルタイムで タスクを再 割り当てする 。
Goal Goal
・ 自動回避によるノンストップ搬 送 ・ タクトタイムの短 縮
主な効果 ・ オペレータ作業の大幅削減 主な効果 ・ 異常時もタスクを自動引き継ぎ
・ ダウンタイムの最小化と生産性向上 ・ システム全 体の最適化・高効率化
走行ルートを自動で再構築 タスクを自動引き継ぎ
05 Phox ter Corporat ion Phox ter Corporat ion 06
Page5
Software Design Software Design
03 車体・天板の同時回転機能
タクト 短 縮 に 寄 与する 車 体と 天 板 の 同 時 回 転 制 御 04 円弧動作機能
A M R を 停 止させ ずに 円 弧 (カ ーブ ) 動 作 でス ムーズ に 走 行
課 題( Before) 課 題( Before) 02 停止
03 回転
01
車体と天 板を 個 別 に回 転させるため 、方 向 転 換 のたびに停止・回 転 が 必 要となり 、 曲がり角に到着 方向転換時に「減速 → 停止 → 回転 → 加速」が必要となり、 01 減速
タクトタイム が増 加する傾 向 がある 。 搬送効率が低下する可能性がある。 04 加速
02
・曲がり角・交 差点が多い現場 車体単体で回転 ・曲がり角・交 差点が多い現場 曲がり角のたびに
主な影響 ・生産性低下 03 主な影響 ・生産性低下 減速・停止・回転・加速を
・AMRの台 数増加 ・AMRの台 数増加
天板を回転 繰り返す
解 決( After) 解 決( After)
車体と天板を同時に回転制御することで、 �Dコード間を円弧(カーブ)で走行し、
停止を伴わないスムーズな方向転換を実現する。 AMRを停止せずに方向転換を実現する。
01
曲がり角に到着
・ タクトタイム短 縮 ・ ノンストップ搬 送
主な効果 ・ 生産性向上 主な効果 ・ タクトタイム短 縮
・ 必要台 数削減によるコスト低 減 02 ・ 高スループット化
車体と天板を同時に回転
07 Phox ter Corporat ion Phox ter Corporat ion 08
Page6
Software Design Software Design
05 トポロジカルマップ方式
現 場レ イア ウト 基 準 でフレキシブル な マップ作 成 06 APIによる緊急停止機能 ※
適 切 な 位 置 へ 緊 急 停 止 ボタンを 配 置 可 能 な 遠 隔 緊 急 停 止 機 能 ※ネットワーク環境によっては、十分に機能を発揮できない場合があります
課 題( Before) 柱 課 題( Before)
グリッドマップ方式ではポイント間隔が固定されるため、 作
業 柱 Start 本体に非常停止ボタンが 搭載されているため、搬 送 物によっては操作が困難になり、
現場レイアウトに制約が生じ、柔軟なルート設計が困難な場合がある。 エ 安全性が低下する場合がある。
Goal リ
ア また外部信号(API含む)による緊急停止機能がなく、外部から停止できない場合が多
いため、安全性に配慮したシステム設計が難しい。
主な影響 ・柱・設備などにより走行ルート設 計の自由度が低い
・既存設備の現場レイアウト変更の制 約が発 生 装置 装置
柱 主な影響 ・運用・作業性の低下
♪
解 決( After) 解 決( After) STOP
柱
�Dコードの設置間隔を自由に設定できるトポロジカルマップを採用することで、 APIを活用した外部からの緊急停止に対応する。
現場レイアウトを基準とした柔軟なルート設計を可能にする。 Goal 作 任意の場所に停止ボタンを配置可能とし、安全性を強化する。
業 柱 Start
エ
リ
・ レイアウト変更の最小化 ア ・ 遠隔から即時 停止
主な効果 ・ 既存設備への導入容易化 主な効果 ・ 人との協働 環境に最適
・ 設 計自由度の大幅向上 装置 装置 ・ 安全設 計の自由度向上
柱
09 Phox ter Corporat ion Phox ter Corporat ion 10
Page7
Software Design Software Design
07 遠隔一斉操作機能
A M R の 電 源 O N / O F F および 移 動 の 一 斉 操 作 08 ブラインドリフト時の棚方向制御機能
棚 コ ードを 貼 付 できな い 運 用 に お ける 棚 方 向 制 御
課 題( Before) 課 題( Before)
複数台のAMRの電源を一括でON/OFFする機能がない場合が多く、 搬送するパレットや棚などに�Dコードを貼付できない場合は、
AMR台数が多い場合は本体の電源ボタン操作によるオペレータの作業負担が大きくなる。 搬送物に対する向き、方向制御ができず運用に制約が生じる場合がある。
メンテナンス時に同 一エリアへAMRを移動させる際、 ・作業性の低下
主な影響 主な影響
通常は�台ずつ手動で操作するため、オペレータの手間がかかる ・搬 送ルートの複 雑化
解 決( After) 電源ON ♪ 解 決( After)
♪
電源ON
複数台のAMRの電源を一括で制御することができ、 電源ON 搬送物の初期配置の向きを認識・保持することで、
指定位置への集約を遠隔操作で実行する。 �Dコードが貼付されていないパレットや棚でも方向制御を可能にし、
レイアウトの自由度が増加する。
電源ON
・ 作業工数の大幅削減 ・ 作業性の向上
主な効果 ・ メンテナンス効率向上 主な効果 ・ レイアウトの再設 計が不要
・ 運用負荷の低 減 ・ 運用の柔軟性向上
11 Phox ter Corporat ion Phox ter Corporat ion 12
StellaDrive
Page8
Sollution Engineering Sollution Engineering
スクラッチ型WCS �Dシミュレーション
高度なデータ連携に対応するフルカスタムWCS 導入前に実運用を再現する高精度シミュレーション
豊富な導入実績で培った知見をもとに、現場ごとの課題や複雑な要件に対応するスクラッチ 工場・倉庫内におけるAMRの走行ルートや動作を�D上で再現。
型WCSを提供。WMSや各種設備との高度なデータ連携を実現し、最適な搬送制御と運用 実運用に近い環境で検証を行うことで、導入前に課題やリスクを可視化する。
効率の最大化を支援する。
・ �Dによる動作・導線の可視化
・ 複雑な業務フロー・データ連携(WMS / MESなど)に対応 ・ RCSベースによる実機に近い動作の再現
特 長 ・ 現場要件に最適化されたフルカスタマイズ設計 特 長
・ 干渉・ボトルネックの事前検証
・ 豊富な導入実績に基づく高信頼なシステム構築 ・ 現地テスト工数・コストの削減
ローコード型WCS AIエージェントによるトラブル復旧支援
現場主導で構築・改善できる、ローコードWCS 属人対応からの脱却を実現する支援ツール
プログラミングを必要とせず、直感的な操作でシステム構築・設定が可能。 AIエージェント機能とChatbot機能を活用し、現場のノウハウを蓄積・活用。
従来は専門エンジニアに依存していた作業を現場主導で実現し、迅速な立ち上げと継続的な トラブル発生時にはAIエージェントがエラーログの解析から対応手順の提示までを支援し、
改善を可能にする。 迅速かつ的確な復旧を実現する。
・ プログラミング不要で設定・構築が可能 ・ ログ収集・解析をAIエージェントが実行
・ PLC信号を活用した柔軟な条件分岐・設備連携 ・ ナレッジ活用による属人化の排除
特 長 特 長
・ 稼働後の設定変更・改善にも迅速対応 ・ FAQ・マニュアル・日報を横断検索
・ 内製化(手の内化)による運用力強化 ・ オンプレミス対応による高セキュリティ運用
13 Phox ter Corporat ion Phox ter Corporat ion 14
StellaDrive
Page9
Spec
Spec Line up
仕様
StellaDriveは、Phoxterの豊富な実績と現場知見を活かして開発された、�Dコード+L-SLAM方式のAMR。
日本の製造・物流環境に適した機能を搭載しており作業効率の向上や人手不足への対応、安定した自動化を実現し、お客様の現場課題の解決に貢献します。 充電器
型式 StellaDrive-CH
寸法 ���[w] × ���.�[d] × ���[h]
外 観 画像
準備中 開発中 開発中 重量 �� kg
入力電圧 単相��~���V、 ��~��Hz
出力電圧(AMR充電時) ��VDC
�Dコード + L-SLAM StellaDrive-L����H StellaDrive-L����H StellaDrive-L����H StellaDrive-L����H StellaDrive-L����H StellaDrive-L����H StellaDrive-L����H
型式
�Dコード + L-SLAM+ISO準拠※� - - - StellaDrive-L����H-CE StellaDrive-L����H-CE StellaDrive-L����H-CE -
TType リフトアップ式 リフトアップ式 リフトアップ式 リフトアップ式 リフトアップ式 リフトアップ式 リフトアップ式
可搬重量(kg) �� ��� ��� ��� ※� �,��� �,��� �,���
外形寸法(L*W*H)(㎜) ���*���*��� ���*���*��� ���*���*��� �,���*���*��� �,���*���*���
全般※� 旋回直径(㎜) ��� ��� ��� �,��� �,���
リフトアップ量(㎜) ��� �� �� �� ��
昇降機構 電動 電動 電動 電動 電動
本体重量(kg) �� ��� ��� ��� ���
障害物検知 前方/後方 前方/後方 前方/後方 前方/後方 前方/後方
衝突検知 前方/後方 前方/後方 前方/後方 前方/後方 前方/後方
安全保護※� 非常停止ボタン 前方/後方 前方/後方 前方/後方 前方/後方 前方/後方
警告音 スピーカー スピーカー スピーカー スピーカー スピーカー
開発中 開発中
進行方向指示レーザー (オプション) (オプション) (オプション) (オプション) (オプション)
空荷(㎜/s) �,��� �,��� �,��� �,��� �,���
最大速度
荷積(㎜/s) �,��� �,��� �,��� �,��� �,���
空荷(㎜/s�) �,��� �,��� �,��� �,��� �,���
モーション※�・� 最大加速度
荷積(㎜/s�) �,��� ��� ��� ��� ���
停止位置精度(㎜) ±�� ±�� ±�� ±�� ±��
停止角度精度(°) ±� ±� ±� ±� ±�
稼働時間(h) �~� � � � �
バッテリー※�・�
充電時間(h) �.� � � � �
※� 国際規格ISO����-�に基づく設計であることを意味します。 ※� 本記載の内容は、予告なく変更される場合があります。あらかじめご了承ください。
※� 本結果は理想条件下での測定によるものであり、実環境においては周囲の状況やその他の要因により差異が生じる可能性があります。 ※� ���kg可搬モデルはカスタム仕様により可搬重量の拡張が可能です。
15 Phox ter Corporat ion Phox ter Corporat ion 16
Page10
Dimension
Dimension Line up StellaDrive-L����H StellaDrive-L����H
外形寸法
��� ���
��� ��� ∅���
∅���
StellaDrive-L����H StellaDrive-L����H StellaDrive-L����H
StellaDrive
��� ��� ���� ��� ���� ���
P h ox t e r C o r p o r a t i o n
∅���� ∅����
∅���
17 Phox ter Corporat ion
���
���
���
���
���
StellaDrive