



このカタログについて
| ドキュメント名 | CORPORATE CATALOG |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.7Mb |
| 取り扱い企業 | 株式会社Phoxter (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page3
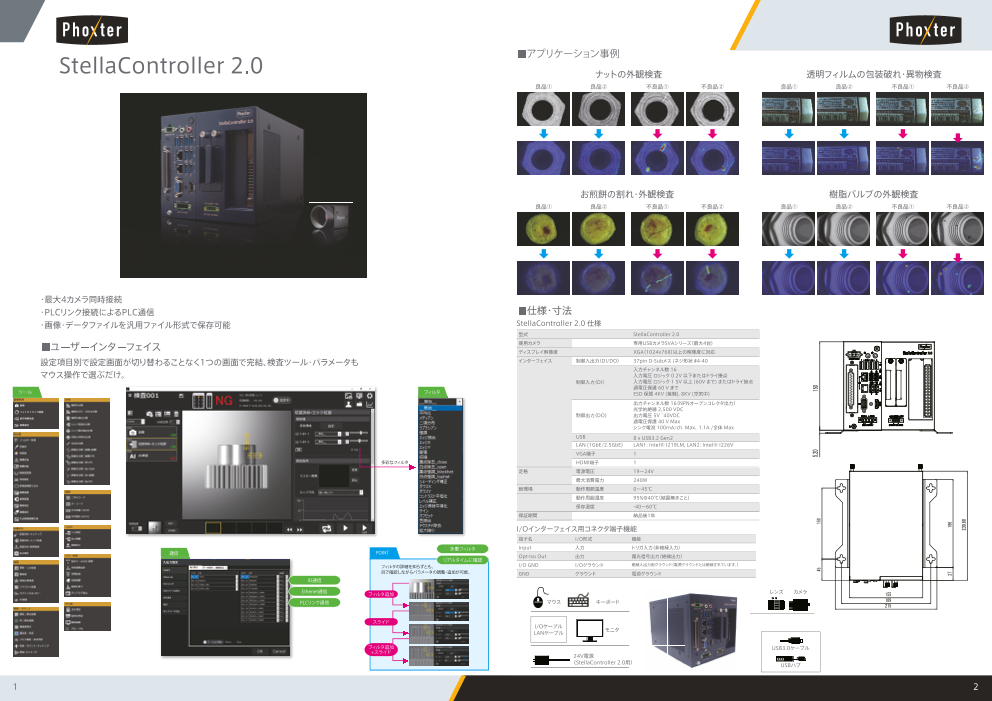
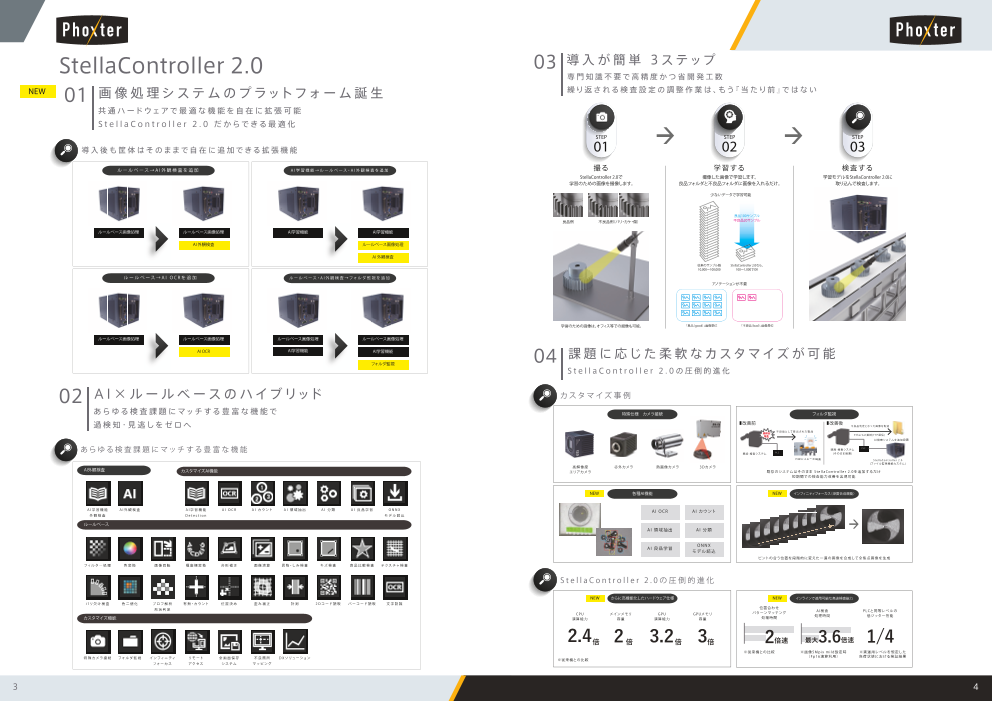
StellaController 2.0 03 導入が簡単 3ステップ
専門知識不要で高精度かつ省開発工数
NEW 01 画像処理システムのプラットフォーム誕生 繰り返される検査設定の調整作業は、もう『当たり前』ではない
共通ハードウェアで最適な機能を自在に拡張可能
S t e l l a C o n t r o l l e r 2 . 0 だからできる最適化
STEP STEP STEP
導入後も筐体はそのままで自在に追加できる拡張機能 01 02 03
ルールベース→A I外観検査を追加 A I学習機能→ルールベース・A I外観検査を追加 撮る 学習する 検査する
StellaController 2.0で 撮像した画像で学習します。 学習モデルをStellaController 2.0に
学習のための画像を撮像します。 良品フォルダと不良品フォルダに画像を入れるだけ。 取り込んで検査します。
少ないデータで学習可能
良品100サンプル
良品例 不良品例(バリ・カケ・傷) 不良品20サンプル
ルールベース画像処理 ルールベース画像処理 AI学習機能 AI学習機能
AI 外観検査 ルールベース画像処理
AI 外観検査
従来のサンプル数 StellaController 2.0なら、
10,000~100,000 100~1,000でOK
ルールベース→A I O C Rを追加 ルールベース・A I外観検査→フォルダ監視を追加
アノテーションが不要
学習のための画像は、オフィス等での撮像も可能。 「良品(good)」画像単位 「不良品(bad)」画像単位
ルールベース画像処理 ルールベース画像処理 ルールベース画像処理 ルールベース画像処理
AI OCR AI学習機能 AI学習機能 04 課題に応じた柔軟なカスタマイズが可能
フォルダ監視
S t e l l a C o n t r o l l e r 2 . 0の圧倒的進化
02 A I×ルールベースのハイブリッド カスタマイズ事例
あらゆる検査課題にマッチする豊富な機能で 特殊仕様 カメラ接続 フォルダ監視
過検知・見逃しをゼロへ ■ 改善前 ■ 改善後
不良品判定となった画像を転送
過検出 不良品として排出された製品
発⽣ E the rne t接続(FTP通信)
A I検査システムを追加設置
あらゆる検査課題にマッチする豊富な機能 既設 検査システム PLC
既設 検査システム PLC (そのまま設置)
目視による二次検査 Ste l l aCon t ro l l e r 2 . 0
(ファイル監視機能カスタム)
AI外観検査 高解像度 赤外カメラ 熱画像カメラ 3Dカメラ
カスタマイズAI機能 エリアカメラ 既存のシステムはそのまま S te l l aCon t ro l l e r 2 . 0を追加するだけ
短期間での検査能力改善を実現可能
NEW 各種AI機能 NEW インフィニティフォーカス(深度合成機能)
A I学習機能 A I外観検査 A I学習機能 A I O C R A I カウント A I 領域抽出 A I 分類 A I 良品学習 ONN X A I OCR A I カウント
外観検査 D e t e c t i o n モデル読込
ルールベース
AI 領域抽出 AI 分類
AI 良品学習 ONNX
モデル読込
ピントの合う位置を段階的に変えた一連の画像を合成して全焦点画像を生成
フィルター処理 色変換 画像回転 極座標変換 台形補正 画像演算 異物・しみ検査 キズ検査 良品比較検査 テクスチャ検査
S t e l l a C o n t r o l l e r 2 . 0 の圧倒的進化
NEW さらに高機能化したハードウェア仕様 NEW インアラドインバでン適ス用ソ可リ能ュなー高シ速ョ検ン査能力
バリ欠け検査 色二値化 プロフ解析 有無・カウント 位置決め 歪み補正 計測 2Dコード読取 バーコード読取 文字認識
形状判定 位置合わせ
CPU パターンマッチング AI検査 PLCと同等レベルの
メインメモリ GPU GPUメモリ
カスタマイズ機能 処理時間 低ジッター性能
演算能力 容量 演算能力 容量 処理時間
2.4倍 2倍 3.2倍 3倍 2倍速 最⼤3.6倍速 1/4
※従来機との比較 ※画像5Mpix m i l d設定時 ※実運用レベルを想定した
特殊カメラ接続 フォルダ監視 インフィニティ リモート 全画面保存 不良箇所 D Xソリューション (Fp16演算利用) 負荷状態における検証結果
※従来機との比較
フォーカス アクセス システム マッピング
3 4
Page5
Mobile Robot Product
潜り込み式搬送ロボット
型式 MR-Q1P-40CE-A(HI) MR-Q2-400CE-D(HI) MR-Q2-400LE-D(HI) MR-Q7-1500CE-D(HI) MR-Q7-1500LE-D(HI) MR-Q7-1500LE-DI(CE) MR-Q8-2000CH-A(HI) MR-Q8-2000LH-A(HI)
Type リフトアップ式 リフトアップ式 リフトアップ式 リフトアップ式
定格可搬重量(kg) 40 400 1500 2000
Navigation方式 2Dコード 2Dコード 2Dコード+LSLAM 2Dコード 2Dコード+LSLAM 2Dコード+LSLAM 2Dコード 2Dコード+LSLAM
+VSLAM +VSLAM +VSLAM +VSLAM
寸法 L*W*H(mm) 650*460*457 780*545*300 1180*860*265 1523*1153*327
ISO3691-4 - - - 適合 -
全般 昇降高度(mm) 420 60 60 60
昇降機構 電動 電動 電動 油圧
回転直径(mm) 683 820 1265 1794
地上クリアランス(mm) 15 30 25 25
天板サイズ(mm) 650*440 724*504 980*800 1450*1050
本体重量(kg) 68 93 215 270 285 500
ディスプレイ なし 標準搭載 標準搭載 標準搭載
前方保護(LiDAR) 標準搭載 標準搭載 標準搭載 標準搭載
後方保護 なし オプション オプション オプション
安全保護 警報音 標準搭載(ブザーのみ) 標準搭載 標準搭載 標準搭載
レーザーガイド表示器 なし オプション オプション オプション
バンパースイッチ 前面 標準搭載 前面/後面 標準搭載 前面/後面 標準搭載 前面/後面 標準搭載
非常停止ボタン 前面 標準搭載 標準搭載 標準搭載 標準搭載
定格速度(空荷)(mm/s) 2500 2000 1800 1500 1000
定格速度(荷積)(mm/s) 2000 1800 1500 1000 900
定格加速度(空荷)(mm/s2) 800 800 600 500 400
定格加速度(荷積)(mm/s2) 500 400 400 300 300
モーション
定格回転速度(空荷)(°/s) 200 200 120 120 90
定格回転速度(荷積)(°/s) 100 80 70 60 45
*位置決め精度(mm) ±10 ±10 ±10 ±10
*角度精度(°) ±1 ±1 ±1 ±1
*稼働時間(h) 8 8 8 8
バッテリー
*充電時間(フル充電後)(h) ≦1.5 ≦1.5 ≦1.5 ≦1.5
*理想的条件下でのテスト結果となります。実際の精度は現場環境、搬送物の寸法、ドッキング条件、その他の要員により影響を受けます。
*稼働時間は特定の条件下での数値となります。
*給電容量や搭載機器に関しては都度お問い合わせください。
7 8