



Sanding and Polishing Robots - Finishing Automation Systems
Product Catalog
By automating the sanding and polishing process, we can help you to reduce your labour shortage, save manpower and improve workplace.
More Details
https://www.yamahafinetech.co.jp/en/fa_products/robots/
Document Information
| Document Title | Sanding and Polishing Robots - Finishing Automation Systems |
|---|---|
| Document Type | Product Catalog |
| File size | 3.9Mb |
| Category | |
| Company | YAMAHA FINE TECHNOLOGIES CO., LTD. (Documents List) |
Documents related to this company

Product Catalog
YAMAHA FINE TECHNOLOGIES CO., LTD.

Product Catalog
YAMAHA FINE TECHNOLOGIES CO., LTD.


Document Contents
Page1
THE FINISHING ROBOT SYSTEM
Product catalog
FA Division
283, Aoya-cho, Minami-ku, Hamamatsu, 435-8568, Japan
TEL +81-53-467-3601 FAX +81-53-467-3613
Website Inquiry
URL https://www.yamahafinetech.co.jp/en/ The contents of this catalog are subject to change without notice.
Page2
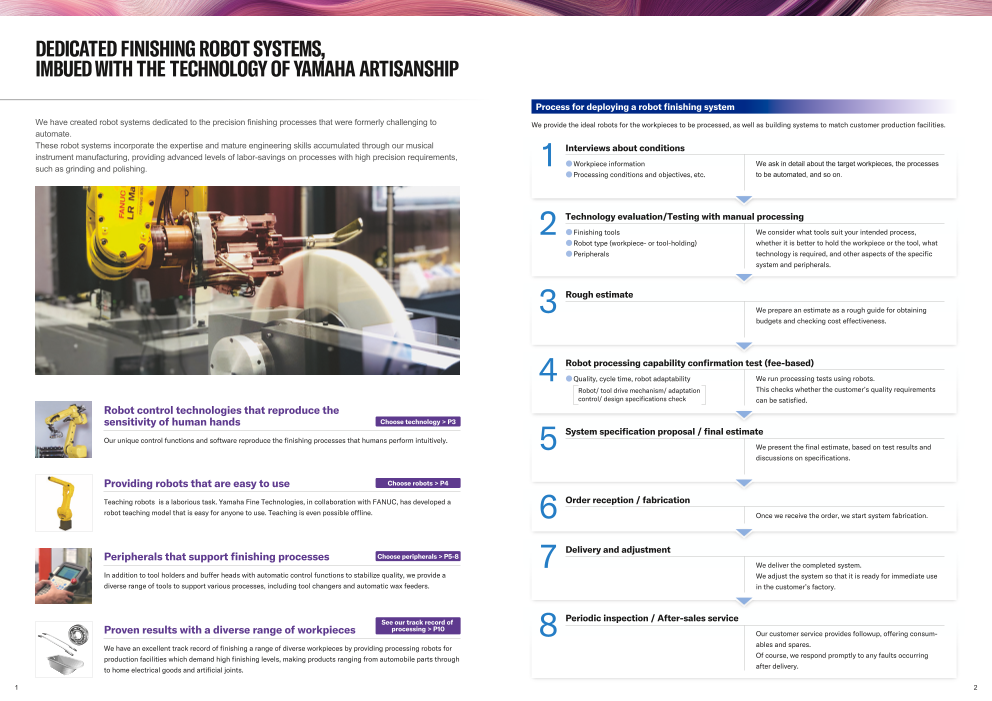
DEDICATED FINISHING ROBOT SYSTEMS,
IMBUED WITH THE TECHNOLOGY OF YAMAHA ARTISANSHIP
Process for deploying a robot finishing system
We have created robot systems dedicated to the precision finishing processes that were formerly challenging to We provide the ideal robots for the workpieces to be processed, as well as building systems to match customer production facilities.
automate.
These robot systems incorporate the expertise and mature engineering skills accumulated through our musical 1 Interviews about conditionsinstrument manufacturing, providing advanced levels of labor-savings on processes with high precision requirements, Workpiece information We ask in detail about the target workpieces, the processes such as grinding and polishing.
Processing conditions and objectives, etc. to be automated, and so on.
2 Technology evaluation/Testing with manual processingFinishing tools We consider what tools suit your intended process,
Robot type (workpiece- or tool-holding) whether it is better to hold the workpiece or the tool, what
Peripherals technology is required, and other aspects of the specific
system and peripherals.
3 Rough estimate We prepare an estimate as a rough guide for obtaining
budgets and checking cost effectiveness.
4 Robot processing capability confirmation test (fee-based)Quality, cycle time, robot adaptability We run processing tests using robots.
Robot/ tool drive mechanism/ adaptation This checks whether the customer’s quality requirements
control/ design specifications check can be satisfied.
Robot control technologies that reproduce the
sensitivity of human hands Choose technology > P3
System specification proposal / final estimate
Our unique control functions and software reproduce the finishing processes that humans perform intuitively. 5 We present the final estimate, based on test results and
discussions on specifications.
Providing robots that are easy to use Choose robots > P4
Teaching robots is a laborious task. Yamaha Fine Technologies, in collaboration with FANUC, has developed a Order reception / fabrication
robot teaching model that is easy for anyone to use. Teaching is even possible offline. 6 Once we receive the order, we start system fabrication.
Delivery and adjustment
Peripherals that support finishing processes Choose peripherals > P5-8 7 We deliver the completed system.
In addition to tool holders and buffer heads with automatic control functions to stabilize quality, we provide a We adjust the system so that it is ready for immediate use
diverse range of tools to support various processes, including tool changers and automatic wax feeders. in the customer’s factory.
See our track record of 8 Periodic inspection / After-sales serviceProven results with a diverse range of workpieces processing > P10 Our customer service provides followup, offering consum-
We have an excellent track record of finishing a range of diverse workpieces by providing processing robots for ables and spares.
production facilities which demand high finishing levels, making products ranging from automobile parts through Of course, we respond promptly to any faults occurring
to home electrical goods and artificial joints. after delivery.
1 2
Page3
Choose technology Choose technology Choose robots We deliver robots that are easy to use
Adaptation control Yamaha started to team up with FANUC, a world-reputed
We convert tool wear and artisans’ sensitivity to numerical data, and teach the robot skills so it can deliver ideal processing of the company, in 2002. The technologies of both companies have
workpiece, every time. We can provide ongoing stable processing quality. been put together, aiming to not only ensure stable quality but
also provide robots anyone can handle. The robot dedicated to
finishing, “the FINISHING MODEL”, was jointly developed.
Load feedback control Used for tools which vary in diameter due to the wear acting on buffers and brushes etc. Comprehensive System technology
robot technology
Finishing robot
Artisan Robot processing
Visual check Load monitoring technology
Process with visual checking Monitors the load when the workpiece
and adjustment of force touches the tool, and corrects the robot’s
application level, to fix position data as the load drops.
declines in processing force Key points of adaptation control
due to buffer wear. Visual check = Load monitoring Teaching support
Force application level = Position data correction
Finishing depends on human senses in many parts. Load put on
teaching is a headache to many people. To reduce such load, the
robot jointly developed by FANUC and us, “the FINISHING MODEL”
This is used with tools such as belt sanders, which are affected by declining processing force,
Offset speed control due to grit offset, speed control, and wear is introduced here. Offline teaching can also be executed.
Artisan Robot
Processing time Automatic speed correction
adjustment Corrects robot position data and sander head
We adjust force application motor speed to match declining processing force.
level and processing time, etc., Key points of adaptation control
to fix declines in processing Teaching support software Offline teachingForce application level = Position data correction
force due to belt wear. Processing time = Speed UP This software is “an operability improving package dedicated Offline teaching, which loads 3D data and automatically
to finishing robots” developed based on long years of experi- creates a machining path, can be proposed. Without stopping
ence. It radically reduces time for work whose load is heavy the robot, data can be created; it becomes possible to maintain
such as teaching work and data editing high accuracy efficiently.
Pressing force control Use when pressing force adjustment is desired work. This software is provided to the
FINISHING MODEL as standard.
Artisan Robot
Force application level Pressing force control
adjustment The robot applies the set pressing force,
Adjust force application level regardless of the position it operates in.
intuitively. Key points of adaptation control
Force application level = Pressing force control
FINISHING MODEL customized by Yamaha
This is a model to which our unique expertise was added, while leaving FANUC's proven standard functions as-is.
Teaching support software Users currently using FANUC products can also use it without any concern.
LR Mate 200iD M-20iB M-710iC R-2000iC
Conventional Teaching support software Small robot with a maximum wrist Medium robot with a maximum wrist Medium robot with a maximum wrist Large robot with a maximum wrist
Revise one point at a time Reduce the workload loading capacity (mass) of 7 kg loading capacity (mass) of 35 kg loading capacity (mass) of 70 kg loading capacity (mass) of 210 kg
Teaching points created Teaching imposes a high workload, including finish
will never be perfect quality checking, as well as data entry and revision.
immediately. We provide proprietary software to reduce the
It is necessary to check the process, and correct workload.
missing or excess points individually. You can use this software to make batch revisions to
It is difficult to make teaching points perfect the points and speeds etc., that you want to revise.
with a single revision, so it is necessary to work Keyboard shortcuts allow revisions with fewer keystrokes.
iteratively through revision and checking.
3 4
Page4
Choose peripherals Peripherals supporting finishing Workpiece handling specifications
Two handling methods Sander heads
Choose whether the robot holds the workpiece or the tool, according to the finishing method and the type of workpiece. This head rotates a sanding belt and performs grinding.
As a standard feature, it is provided with a mechanism that swings a contact wheel to absorb workpiece variations.
Workpiece handling Comparison parameters Workpiece grasping Tool grasping
The robot holds a workpiece. △ Vertical sander head Horizontal sander headTarget Weight Constraints due to the mass the robot can carry ◎ No restrictions
workpiece
Size △ Constraints due to the mass the robot can carry △ Robot movement, workpiece movement
Type (multiple types are supported) △ Hand changing is required (AHC) ○ Change of tools, etc.
Tool Tool type ◎ Within robot’s movable range (multiple) △ Restricted / Supports ATC, AHC
Tool head output ◎ High output, because installed on floor △ Restricted by weight the robot can carry
Processing capacity ◎ Capable of many types of high-power processing ○ Restricted by tool power
Systematization Workpiece fixing method △ The robot’s holding hand must be engineered ○ Simple with a fixing jig
Tool handling
Workpiece supply method ○ Pallet and stocker types △ Supply feeder to the jig
The robot holds a tool.
Inlining ◎ Dedicated for handling ○ Loader, etc.
Features Space-saving design, highly efficient dust collection, Features Teaching usability, swing mechanism
Others Cycle time ○ Actual processing + setting workpieces aside ○ Actual processing (+ tool change)
swing mechanism Contact wheel Standard: φ300 (Shape and material can be customized)
Robot teaching ○ Workpiece holding operation is similar to human work ○ Hand tool operation is similar to human work Contact wheel Standard: φ300 (Shape and material can be customized) Sanding belt Standard: 2100 circumference (up to 75 wide)
Dust collection efficiency ○ One-direction hood type △ Dust scattering in all directions, overall dust collection Sanding belt Standard: 2100 circumference (up to 75 wide) Customization Automatic duct opening / closing unit /
Summary Switch to process cells Switch to general-purpose processing units Customization Automatic duct opening / closing unit / support Controllable contact wheel swing force
support Controllable contact wheel swing force
Combination with peripherals
Buffing head
Robots can be selected in isolation, or in combination with standard peripherals to suit workpieces.
We then su
est other peripherals to suit the system. A tool for performing polishing by rotating a wheel tool such as buff and a brush.
Let us know the Vertical swing buffing head Horizontal buffing head
target workpieces
We offer proposals for System operation panel
specifications that meet Safety fence
customer needs Robot System control device
We design and build systems FANUC Robot A
customized b
y YAMAH
to suit the intended workpieces tool holder
Standard specification
tool
Application
Features Space-saving design, highly efficient dust collection, Features Teaching usability
buffing swing mechanism Buffing Standard: φ300 (Shape and material can be customized)
Buffing Standard: φ300 (Shape and material can be customized) Customization Automatic duct opening / closing unit /
Customization Automatic duct opening / closing unit / support Automatic solid waxing unit
support Automatic solid waxing unit
Robot control device
Workpiece feeder Workpiece fixing jig Teaching pendant
Tool heads
Select from the standard lineup Select from delivered examples
Tool heads are arranged around the robot to suit the machining usage.
●Robot ●Overall base
●Tool drive mechanism (tool head / tool holder) ●Safety fence (safety and environmental measures: dust and noise prevention) Thrust tool head (1) Thrust tool head (2) Radial tool head Oscillating rasp head
●Workpiece feeder ●Dust collection-related (hood, pipes, dust collector)
●Peripherals, tool changers, etc. ●System control devices (control panel, operation panel, indicator lights)
We accept special orders to suit the intended workpieces
●Workpiece fastener (robot hand / fixing jig)
5 6
Page5
Choose peripherals Peripherals supporting finishing Buffing tool holder Wax supplier
Tool handling specifications This holder is suitable for polishing the surface of large A wax supplier applied to buffing tool holders. Automatic wax supply
workpiece. increases work efficiency and contributes to manpower saving.
Thrust floating
Solid wax supplier
The use of a linked structure for linear sliding both improves rigidity and enables smooth floating. By profiling the irregularities in the Buffing tool holder
workpiece surface and applying tools at a given level of force, it is possible to machine in a variety of directions from flat surfaces to
curved surfaces, while absorbing variances in workpiece dimensions and clamps. The robot applies thrust control that presses a tool at
a given level of force without being affected by the tool angle.
Wheel tool holder Disk tool holder
Motor specifications (options) AC servomotor Liquid wax supplier
Customization support Tool diameter compensation control Buffing tool holder
Applicable peripherals Tool dresser / Tool changer / Waxer
Motor specifications (options) Spindle motor / AC servomotor Motor specifications (options) Spindle motor / AC servomotor /
Customization support Tool diameter compensation control / High frequency motor
Floating amount output / ATC collet Rotating mechanisms (options) Single / Gear action / Double action Tool holder based tool changer
Applicable peripherals Tool dresser / Tool changer / Wax supplier Customization support Localized dust collection / Disk pad shape
Applicable peripherals Automatic changer for sandpaper disks For each tool holder, a tool changer for automatically changing tools is available. This increases work efficiency and contributes to
manpower saving.
Belt sander tool holder
Tool changer Sandpaper disks changer
Wheel tool holder Disk tool holder
Provided with ATC functionality and
applicable to spindle motors
Sandpaper disk Choose between φ100 and 125
Motor specifications AC servomotor Belt sander changer specifications (with magic tape)
φ Sandpaper disk 100 disks per stockContact wheel Standard: 80 x 65 (Shape and material can be customized) Belt sander tool holder
stock capacity (varies depending on the thickness of disks)
Sanding belt Standard: 70 mm wide by 620 mm circumference (Shape and material can be customized)
Customization support The number of paper supply components
Customization support Contact wheel
can be increased.
Applicable peripherals Belt sander changer
Radial tool holder
An escape mechanism in the radial direction (360°) is provided to make it easy to deal with burr irregularities. The floating power
(centripetal force) can be configured as desired in the program. This holder is suitable for removing tiny burrs using a rotary bar. Added NC axis
Motor specifications (options) Electric spindle motor / Air motor A standard turntable using a robot's optional axis. This table rotates in synchronization with
Customization support ATC collet the robot and is effective at machining a cylinder type workpiece as a workpiece rotation
Applicable peripherals Tool changer positioning unit.
7 8
Page6
See our track record of processing Solution case See our track record of processing Proven with a range of workpieces
Deburring system for small parts Automobiles Automobiles / Bicycles
Ideal for deburring small Application examples Multiple workpieces can be set from the worker side Aluminum wheels Door handle Brake lever Crank
during operation.
・ Material: Aluminum Material: Aluminum Material: Aluminum Material: Aluminumparts. Holding the Cellphones Processing method: Processing method: Processing method: Processing method: Grinding
workpiece makes it ・Computer parts Grinding and deburring Grinding and polishing Grinding and polishing
・Binocular frames
possible to perform highly ・Camshafts Consider dust countermeasures. Systems can be
efficient deburring, even customized to suit the customer’s environment. Dust
with multiple tools. Takt collectors can be installed as options.
losses due to tool
Control of all devices, including the control panel, Door mirror holder Door frame Brake parts Motorcycle fuel tankschanges are eliminated,
pneumatic devices, and teaching pendant, as well as Material: Aluminum and plastic Material: Aluminum and steel Material: Aluminum Material: Steel
which assists automation. tool changes can be performed from the front of the Processing method: Deburring Processing method: Grinding Processing method: Grinding Processing method: Grinding
system.
Grinding and polishing systems for small parts Run the sanding belt to polish. Functions to absorb variations between workpieces are included as
standard.
Grinding and polishing processes can be Application examples Wood panel Roof rails Helmets
automated by mounting sander or buffer ・Cranks Material: Wood Material: Aluminum Material: FRP
・Brake levers Multiple workpieces can be set from the worker side Processing method: Polishing Processing method: Polishing Processing method: Grinding heads.
・Door handles during operation.
Consider dust countermeasures. Systems can be
customized to suit the customer’s environment. Dust
collectors can be installed as options.
Tools and blades Housing devices
Control of all devices, including the control panel,
pneumatic devices, and teaching pendant, as well as Hammer Cutting pliers Sanitary fitting Chair parts
tool changes can be performed from the front of the Material: Steel Material: Steel Material: Copper alloy Material: Plastic
system. Processing method: Grinding Processing method: Grinding Processing method: Processing method: Deburring
Grinding and polishing
Deburring system for aluminum wheels
Burring from mechani- Application examples We mount a tool holder, developed specifically for
chamfering in the decorative holes of aluminum
cal processing of ・Aluminum wheels, onto a small robot. Box wrenches Kitchen knives Door handle Bathtubs
aluminum wheels can automobile wheels Material: Steel Material: Wood and steel Material: Aluminum / Stainless steel Material: FRP
Processing method: Grinding Processing method: Processing method: Processing method: Grinding
be removed. NC indexers rotate the workpieces to compensate for Grinding and polishing Grinding and polishing
Cylindrical workpieces the robot’s range of motion, saving space.
other than aluminum
wheels can also be
handled. Specialized sensors automatically grind to form
vertices. Positioning work at the setup stage is
simple. Other
Aircraft frames Golf club head Artificial joint Trumpet parts
Material: CFRP Material: Titanium / Stainless / Aluminum Material: Stainless steel Material: Brass
Grinding and polishing systems for medium parts Processing method: Processing method: Processing method: Processing method:
Grinding and polishing Grinding and polishing Grinding and polishing Grinding and polishing
These systems handle workpieces which Application examples Wheel tool-supporting
cannot be held by small robots, and handle ・Cranks ・Wheel tool holder
・Tool changer
workpieces for which there is an inadequate ・Case covers
・Transmission cases
range of motion. We select other peripherals Disk tool-supporting Ko-dai (incense holder) Turbine blade Bearings
to suit the customer’s wishes. ・Disk tool holder Material: Brass Material: Superalloy and ceramic Material: Steel
・Disk paper changer Processing method: Processing method: Processing method: Polishing
Grinding and polishing Grinding and polishing
Belt sander tool-supporting
・Belt sander tool holder
・Belt sander changer
9 10