




Micro DirectDrive Motor & mistubishi Collaboration Catalog
Product Catalog
Document Information
| Document Title | Micro DirectDrive Motor & mistubishi Collaboration Catalog |
|---|---|
| Document Type | Product Catalog |
| File size | 2.4Mb |
| Category | |
| Company | マイクロテック・ラボラトリー株式会社 (Documents List) |

Document Contents
Page1
SERVO SYSTEM PARTNER
μDD Motor
Page2
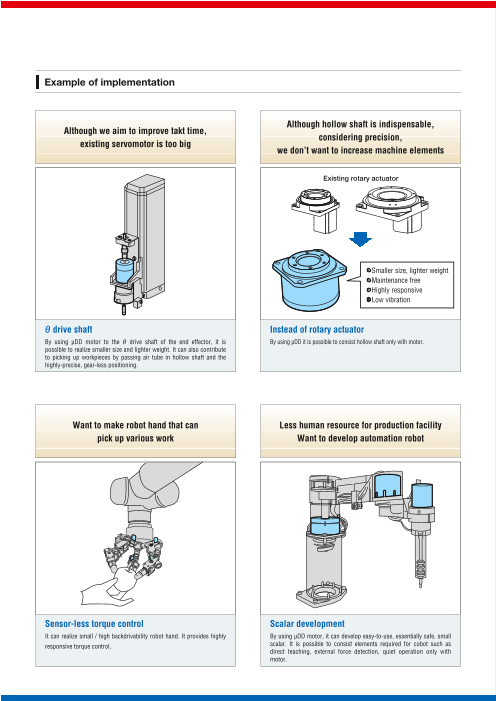
Example of implementation
Although hollow shaft is indispensable,
Although we aim to improve takt time,
considering precision,
existing servomotor is too big
we don’t want to increase machine elements
Existing rotary actuator
・ Smaller size, lighter weight
・ Maintenance free
・ Highly responsive
・ Low vibration
θ drive shaft Instead of rotary actuator
By using µDD motor to the θ drive shaft of the end effector, it is By using µDD it is possible to consist hollow shaft only with motor.
possible to realize smaller size and lighter weight. It can also contribute
to picking up workpieces by passing air tube in hollow shaft and the
highly-precise, gear-less positioning.
Want to make robot hand that can Less human resource for production facility
pick up various work Want to develop automation robot
Sensor-less torque control Scalar development
It can realize small / high backdrivability robot hand. It provides highly By using µDD motor, it can develop easy-to-use, essentially safe, small
responsive torque control. scalar. It is possible to consist elements required for cobot such as
direct teaching, external force detection, quiet operation only with
motor.
Page3
What’s μDD motor?
Extremely small, high torque direct drive motor
■ High torque realized with aperiodic compass and high density winding technology.
■ Achieved both smaller size and lighter weight and precise positioning by comprehensive design of motor
and high resolution encoder.
■ Using high stiffness bearing that can bear direct heavy load.
■ There is also a hollow shaft type.
■ It could be customized depending on the needs of users.
MDS/MDH-20 series
The smallest through-shaft servomotor in the world.
Perfect for end effector (hand, gripper, Zθ unit) with through-shaft.
It could be used for small hand in combination with low
slowdown rate gear.
■ Shell diamete:r φ21mm Shell length: 32/38/44mm
■ Maximum speed: 3000rpm
■ Maximum resolution: 144,000C/R
■ Hollow diamete:r φ2.6mm(MDH model)
MDS/MDH-30 series
Perfect for highly-precise dispenser and small gimbal driving.
■ Shell diamete:r φ30mm Shell length: 32/38/44mm
■ Maximum speed: 1000rpm
■ Maximum resolution: 432,000C/R
■ Hollow diamete:r φ4mm(MDH model)
MDS/MDH-40 series
Perfect for end effector (convey θ axis and for alignment purpose),
automation of production facility and robot (corresponds to wrest).
■ Shell diamete:r φ40mm Shell length: 32/38/44mm
■ Maximum speed: 450rpm
■ Maximum resolution: 1,296,000C/R
■ Hollow diamete:r φ6・12mm(MDH model)
MDH-70 series
Small-sized large diameter hollow shaft. Perfect for index table,
replacement of rotary actuator, robot (corresponds to elbow and shoulder)
■ Shell diamete:r φ70mm Shell length: 32/38/44mm
■ Maximum speed: 200rpm
■ Maximum resolution: 2,592,000C/R
■ Hollow diamete:r φ25mm(MDH model)
*Please refer to μDD motor catalogue for detail of full view.
*Currently, only incremental encoder is intended for collaboration.
Page4
Specification
MR-J4W2-0303B6-MX940J○○○
Amplifier Servo amplifier model Rated Motor rated Motor peak current Rated Maximumtorque current Peak torque Peak current rotation rate rotation rate
Series Motor model supply voltage MR-J4W2-0303B6-MX940○○○
(DC24/48V) (○○○ part) N・m Arms N・m Arms rpm rpm
MDS-2006-36KE J183 0.014 1.100 0.033 2.600 1,500 3,000
MDH-2006-36KE J184 0.014 1.100 0.033 2.600 1,500 3,000
MDS-2012-36KE J185 0.026 1.200 0.090 4.300 1,500 3,000
MD-20 DC24V
MDH-2012-36KE J186 0.026 1.200 0.090 4.300 1,500 3,000
MDS-2018-36KE J187 0.030 1.400 0.120 5.600 1,500 3,000
MDH-2018-36KE J188 0.030 1.400 0.120 5.600 1,500 3,000
MDS-3006-108KE J189 0.044 1.800 0.110 4.600 1,000 1,000
MDH-3006-108KE J190 0.044 1.800 0.110 4.600 1,000 1,000
MDS-3012-108KE J191 0.068 1.800 0.210 5.600 1,000 1,000
MD-30 DC48V
MDH-3012-108KE J192 0.068 1.800 0.210 5.600 1,000 1,000
MDS-3018-108KE J193 0.100 1.700 0.370 6.300 1,000 1,000
MDH-3018-108KE J194 0.100 1.700 0.370 6.300 1,000 1,000
MDS-4006-324KE J195 0.100 1.600 0.330 6.300 450 450
MDH-4006-324KE J196 0.100 1.600 0.330 6.300 450 450
MDS-4012-324KE J197 0.160 1.700 0.700 7.500 450 450
MD-40 DC48V
MDH-4012-324KE J198 0.160 1.700 0.700 7.500 450 450
MDS-4018-324KE J199 0.230 2.300 1.000 10.000 450 450
MDH-4018-324KE J200 0.230 2.300 1.000 10.000 450 450
MDH(12)-4006-324KE J214 0.100 1.600 0.330 6.300 450 450
MDH
(12)-40 MDH(12)-4012-324KE DC48V J215 0.160 1.700 0.700 7.500 450 450
MDH(12)-4018-324KE J216 0.230 2.300 1.000 10.000 450 450
MDH-7006-648KE J201 0.309 2.400 1.000 10.000 200 200
MDH-70 MDH-7012-648KE DC48V J202 0.528 2.400 2.200 10.000 200 200
MDH-7018-648KE J203 0.686 2.400 2.850 10.000 200 200
MR-J4-○○△-RJJ001
Rated Motor rated Motor peak current Rated Maximum
torque current Peak torque Peak current rotation rate rotation rate
Series Motor model Recommended servo amplifier model (*1)
N・m Arms N・m Arms rpm rpm
MDS-3006-108KE 0.044 1.800 0.110 4.600 1,000 1,000
MDH-3006-108KE MR-J4-40A-RJJ001/ 0.044 1.800 0.110 4.600 1,000 1,000
MDS-3012-108KE MR-J4-40B-RJJ001 0.068 1.800 0.210 5.600 1,000 1,000
MD-30
MDH-3012-108KE 0.068 1.800 0.210 5.600 1,000 1,000
MDS-3018-108KE 0.100 1.700 0.370 6.300 1,000 1,000
MDH-3018-108KE MR-J4-60A-RJJ001/ 0.100 1.700 0.370 6.300 1,000 1,000
MDS-4006-324KE MR-J4-60B-RJJ001 0.100 1.600 0.330 6.300 450 450
MDH-4006-324KE 0.100 1.600 0.330 6.300 450 450
MDS-4012-324KE 0.160 1.700 0.700 7.500 450 450
MD-40
MDH-4012-324KE MR-J4-70A-RJJ001/ 0.160 1.700 0.700 7.500 450 450
MDS-4018-324KE MR-J4-70B-RJJ001 0.230 2.300 1.000 10.00 450 450
MDH-4018-324KE 0.230 2.300 1.000 10.00 450 450
MDH(12)-4006-324KE MR-J4-60A-RJJ001/MR-J4-60B-RJJ001 0.100 1.600 0.330 6.300 450 450MDH
(12)-40 MDH(12)-4012-324KE 0.160 1.700 0.700 7.500 450 450
MDH(12)-4018-324KE 0.203 2.300 1.000 10.00 450 450
MR-J4-70A-RJJ001/
MDH-7006-648KE MR-J4-70B-RJJ001 0.360 2.800 1.000 10.00 200 200
MDH-70 MDH-7012-648KE 0.660 3.000 2.200 10.00 200 200
MDH-7018-648KE 1.000 3.500 3.100 10.00 200 200
*1) It can be used at lower volume. Please contact MICROTECH LABORATORY INC. for the motor torque for such case.
*Continuous rated current is the index measured at 40℃ ambient temperature with standard heat sink attached to motor.
For heat sink size, please refer to μDD motor catalogue.
*Due to pressure, MD-20 series can’t be used in MR-J4-○○△-RJJ001.
Page5
Partner collaboration
Partner driving device
General-purpose interface
Pulse-train input
Analogue voltage input
MR-J4-B MR-J4-B MR-J4-B MR-J4-B-RJ MR-J4-A-RJ
J001 MR-J4W2-0303B6-MX940Jxxx(xxx differs by motor) J001
Now it can be connected to μDD motor which is
perfect for end effector!
Implementation advantage
■ Hollow shaft
(Can pass through cable, air tube, laser, ball screw, splined shaft)
■ Smaller size, lighter weight
■ Highly-precise positioning, highly-precise position・torque measure
■ Compliance control, high backdrivability
■ Low speed high torque drive, lower speed ripple
■ More silent driving
Page6
Connection example*1
MR-J4W2-0303B6-MX940Jxxx (xxx differs by motor)
MR Configurator2
SSCNETⅢ/H connection *2
CN3 flexible cable (4.2)0.2M-TE(J4)
DC24/48V
*2
CN2 flexible cable (4.2)0.2M-(CF) *3
MR-J4-RJJ001*4
AC200V
MR Configurator2
SSCNETⅢ/H connection
*2
CN2 flexible cable (4.2)0.2M-(CF)
CN3 flexible cable (4.2)0.2M-3M(J4)
*2
*1: above is a connecting example. For actual connection, please refer to product specification.
*2: For exchange cable, please contact MICROTECH LABORATORY.
*3: The driving motor of MR-J4W2-0303B6-MX940Jxxx (xxx differs by motor) is 2-axis integrated model.
In case you want to have different type for each axis, please contact us.
*4: Photo with display cover open.
MICROTECH LABORATORY INC.
■Head office:
8-1-46 Honcho, Kamitsuruma, minami-ku Sagamihara-shi Kanagawa 252-0318, Japan
PHONE.81-42-746-0123 FAX.81-42-746-0960
https://motor.mtl.co.jp
MEL-MTL.2019.11.E