



ショートストロークの直線動作と 高精度位置決めを実現。
ショートストロークの直線動作、ピタッ!と高精度な位置決めに。
ステッピングモーターとボールねじを一体化し、直線動作を実現した製品です。カップリング等の機構部品削減による装置の小型化と高精度位置決めで装置の性能向上に貢献します。
■設計の工数・時間を大幅に削減
■装置の小型化・軽量化
■お求めやすい価格を実現
※詳しくはPDF資料をご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | コンパクト電動シリンダ DRLIIシリーズ 位置決め機能内蔵タイプ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 8.3Mb |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
コンパクト電動シリンダ
DRL シリーズ
位置決め機能内蔵タイプ
ステッピングモーターとボールねじを一体化し、直線動作を実現した製品です。
カップリング等の機構部品の削減による装置の小型化と高精度位置決めで装置の性能向上に貢献します。
繰り返し
位置決め精度 最大推力 価格
±0.003mm 300N 60,200円~
Page2
コンパクト電動シリンダ
DRL シリーズ
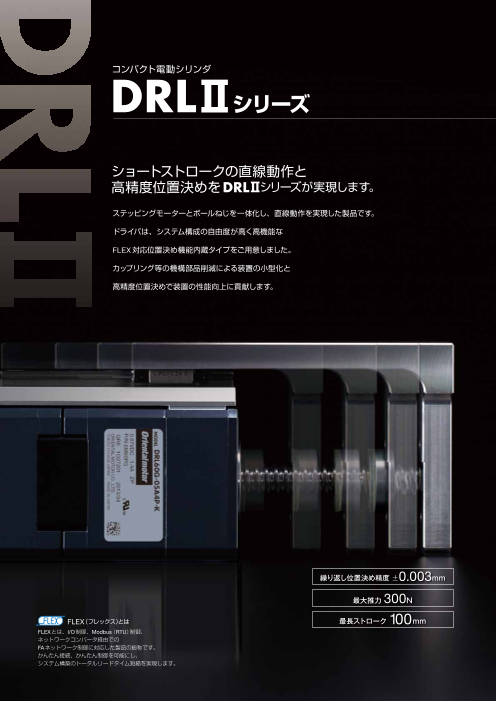
ショートストロークの直線動作と
高精度位置決めをDRL シリーズが実現します。
ステッピングモーターとボールねじを一体化し、直線動作を実現した製品です。
ドライバは、システム構成の自由度が高く高機能な
FLEX対応位置決め機能内蔵タイプをご用意しました。
カップリング等の機構部品削減による装置の小型化と
高精度位置決めで装置の性能向上に貢献します。
繰り返し位置決め精度 ±0.003mm
最大推力 300N
FLEX(フレックス)とは 最長ストローク 100mm
FLEXとは、I/O制御、Modbus(RTU)制御、
ネットワークコンバータ経由での
FAネットワーク制御に対応した製品の総称です。
かんたん接続、かんたん制御を可能にし、
システム構築のトータルリードタイム短縮を実現します。
Page3
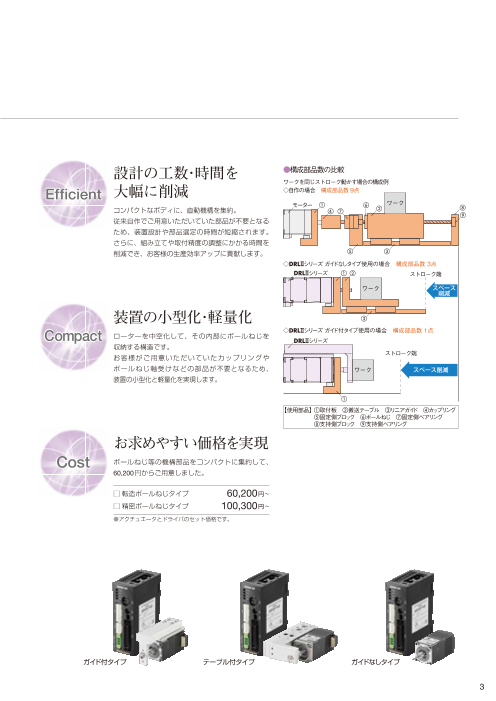
設計の工数・時間を ●構成部品数の比較
ワークを同じストローク動かす場合の構成例
Efficient 大幅に削減 ◇自作の場合 構成部品数 9点
モーター ① ⑥ ワーク
コンパクトなボディに、直動機構を集約。 ⑧
④ ⑦ ②
⑨
従来自作でご用意いただいていた部品が不要となる
ため、装置設計や部品選定の時間が短縮されます。
さらに、組み立てや取付精度の調整にかかる時間を
削減でき、お客様の生産効率アップに貢献します。 ⑤ ③
◇DRLⅡシリーズ ガイドなしタイプ使用の場合 構成部品数 3点
DRLⅡシリーズ ① ② ストローク端
ワーク スペース
削減
装置の小型化・軽量化 ③
Compact ◇DRLⅡシリーズ ガイド付タイプ使用の場合 構成部品数 1点
ローターを中空化して、その内部にボールねじを
DRLⅡシリーズ
収納する構造です。
DRLⅡシリーズ ストローク端
お客様がご用意いただいていたカップリングや
ボールねじ軸受けなどの部品が不要となるため、 ワーク スペース削減
装置の小型化と軽量化を実現します。
①
【 使 用 部 品 】①取付板 ②搬送テーブル ③リニアガイド ④カップリング
⑤固定側ブロック ⑥ボールねじ ⑦固定側ベアリング
⑧支持側ブロック ⑨支持側ベアリング
お求めやすい価格を実現
Cost ボールねじ等の機構部品をコンパクトに集約して、
60,200円からご用意しました。
□ 転造ボールねじタイプ 60,200円~
□ 精密ボールねじタイプ 100,300円~
●アクチュエータとドライバのセット価格です。
ガイド付タイプ テーブル付タイプ ガイドなしタイプ
3
Page4
コンパクト電動シリンダの特徴
高精度位置決め
中空ローターにボールねじナットを結合。
カップリング剛性等の部品の組み合わせによるバック
ラッシの影響が少なくなり、精度の高い位置決めが
実現可能となりました。
ボールねじ軸
中空ローター
ボールねじナット ボールねじナットと中空ローターを直結
【繰り返し位置決め精度】
精密ボールねじ:±0.003mm 転造ボールねじ:±0.01mm
ピタッと止まる
ステッピングモーターを採用
DRL シリーズはステッピングモーターを使用。
ステッピングモーターなので1ステップ送りの位置 正確な位置決め。
決め精度は高く、前進、後退を正確におこなうことが ピタッと完全停止
できます。
また、停止時に軸が微小に動くハンチングと呼ばれる ワーク ハンチングは無し
現象を起こすこともないため、停止位置保持が確実に
おこなえます。
内部構造について
ステーター
中空ローター部にボールねじ軸を収納 DRL シリーズはローター部を中空化してボールねじを内部に収納
短い全長で最大限のストロークを確保 できる構造です。中空ローターが回転することによりボールねじ
ナットが回転し、ボールねじ先端に回り止め機構✽を設けることで
ボールねじ軸は直線動作します。
ボールねじの種類は、微小送りや高精度位置決めの精密ボールねじ
ボールねじ軸 と、一般的な位置決め用として信頼性のある転造ボールねじの2種
類があります。
ボールねじ軸は中空ローター内部に収納されるため、短い全長で最大
限のストロークを確保しています。
中空ローター さらに、ボールねじナットの外周部には直線動作時に発生する
大口径スラスト軸受け機構 大きなスラスト荷重を直接受けるための、大口径のベアリングを
ボールねじナット 配置しています。
ボールねじナットと中空ローターを直結
*ガイド付タイプ、テーブル付タイプは不要です。
4
Page5
用途に応じて選べる3タイプ
タイプ ガイド付タイプ テーブル付タイプ ガイドなしタイプ
外観
アクチュエータに負荷を固定できる アクチュエータに負荷を固定できる お客様の装置に直接組み込んでの使用
ガイドを付けた製品です。 ガイドを付けた製品です。 や、アクチュエータの外部に負荷搬送
負荷の直接取り付けが容易です。 負荷の取り付けおよび本体の取り付け 用のガイドを設けて使用する製品です。
が容易で、可動部の高さを抑えた搬送
が可能です。
ストローク[mm] 25~50 25、30 25~100
推力[N] 15~300 15、30 15~300
価格✽ 76,700円~ 93,000円~ 60,200円~
[カメラのフォーカス駆動] [分光器] [X-Yテーブル]
※垂直方向での駆動には
電磁ブレーキ付を
代表的な用途例 お使いください。
このほかの用途例は
10ページをご覧ください。
*アクチュエータとドライバのセット価格です。
■付加機能
各タイプには、付加機能として「調整ノブ付」「電磁ブレーキ付」をご用意しています。
調整ノブ付 電磁ブレーキ付
ガイドなしタイプのDRL28、DRL42、
DRL60にストロークの長い製品をライン
アップしています。
用途例 電源OFF時のXYステージ 用途例 電源OFF時のCCDカメラ
位置微調整、移動 Z軸方向の位置保持
電源OFF時に手動で位置の調整ができます。 電源OFF時に停止位置を保持します。
装置のメンテナンス時などに便利です。 垂直方向に取り付けてもワークの落下等の
心配がなく、安心してお使いいただけます。
5
Page6
ドライバの特徴[1]
位置決め機能内蔵タイプ
位置決め機能内蔵ドライバ の特徴
① I/Oで ② コンピュータまたは ② シリアル通信で ③ FAネットワークで
制御する場合 タッチパネルから 制御する場合 制御する場合
制御する場合
CPU 位置決め CPU CPU
電源 ユニット 電源 シリアル通信 電源 FA ネットワーク
I/O 不要 ユニット ユニット
FAネットワーク
I/O Modbus(RTU) Modbus(RTU) ネットワーク
コンバータ(別売)
RS-485
モーターの運転に必要な情報をドライバに持たせるため、上位PLCの負担が軽減します。複数軸制御の場合の
システム構成がシンプルになります。サポートソフト、もしくはRS-485通信による設定となります。
● はCC-Link協会、 はMECHATROLINK協会の登録商標です。
● は、ドイツのベッコフオートメーション株式会社がライセンスを供与した登録商標です。
■接続方法
① I/O
ドライバに位置決めユニット(パルス発振器)の機能を内蔵しているため、スイッチボックスまたはPLCと直結して、I/Oによる運転システ
ムを構成できます。PLC側に位置決めユニットが不要になるため、省スペース・システムの簡素化を実現します。
●スイッチボックスを使用する例 ●PLCを使用する例 ●PLCとタッチパネルを使用する例
I/O I/O
STRT STOP ユニット タッチパネル ユニット
CCW CW
CPU CPU
ユニット ユニット
STRT STOP
CCW CW 電源 電源
ユニット ユニット
スイッチボックス
ドライバに運転データを設定するため、手元のスイッ PLCを使用する場合、I/Oユニットと直結して運転シ 通常時は I /Oでアクチュエータを起動・停止します。
チと接続するだけでアクチュエータを起動、停止させ ステムを構成できます。PLC側で位置決めユニットが 運転データの設定変更やモニタ、アラーム表示は
ることができます。PLCを使わないで簡単に制御が可 不要となるため、省スペース、システムの簡素化を実 Modbus(RTU)通信を利用しタッチパネルでおこない
能です。 現します。 ます。段取りが多い場合、変更をタッチパネルで簡単
におこなえ、ラダーを組む負担が軽減します。
② Modbus(RTU)/RS-485 ③ FAネットワーク
RS-485通信で、運転データやパラメータの設定、運転指令の入力がおこなえます。 ネットワークコンバータ(別売)を使用することで、
シリアル通信ユニット 1台に対して、ドライバを最大 31台まで接続可能です。 CC-Link通信やMECHATROLINK通信、EtherCAT
また、複数軸の同時スタートを可能にする機能を持っています。プロトコルは 通信に対応できます。各種通信で運転データやパ
Modbus(RTU)に対応しており、パネルコンピュータまたはコンピュータなどに ラメータの設定、運転指令の入力をおこなえます。
接続できます。
6
Page7
■システム構成
アクチュエータの運転に必要な情報をドライバに持たせるため、上位PLCの負担が軽減します。
複数軸制御の場合のシステム構成がシンプルになります。
データ設定器(別売)、サポートソフトもしくはRS-485通信による設定となります。
基本設定 運転データ設定 データ設定
(出荷時設定) パラメータ変更
ドライバ テスト運転
データ設定器
(OPX-2A)
アクチュエータ アラーム履歴
パラメータ変更
または
モニタ
サポートソフト(MEXE02) データコピー
● RS-485通信による設定も可能です。
● サポートソフトはWEBサイトからダウンロードできます。
■運転の種類
位置決め機能内蔵タイプは、アクチュエータの運転速度や移動量を運転データで設定し、
選択した運転データにしたがって、運転をおこないます。運転の種類は4パターンです。
項目 内容
I/O制御
制御方法 ネットワークコンバータ接続
RS-485通信
Modbus RTUプロトコル接続
共通 位置指令入力 運転データNo.で設定 1点の指令範囲:−8388608∼8388607[step](設定単位:1[step])
速度指令入力 運転データNo.で設定 指令範囲:0∼1000000[ Hz](設定単位:1[Hz])
運転データNo.またはパラメータで設定します。
加減速指令入力
指令範囲:0.001∼1000.000[ms/kHz] ( 設定単位:0.001[ms/kHz])
2センサ方式 リミットセンサ(+LS、−LS)を用いた原点復帰運転です。
3センサ方式 リミットセンサとHOMEセンサを用いた原点復帰運転です。
原点復帰運転 原点復帰方法
任意の位置でP-PRESETを入力し、原点を確定する機能です。
位置プリセット
原点位置を任意の値に設定できます。
位置決め点数 63点(No.1∼63)
インクリメンタル方式(相対位置決め)
運転方式
アブソリュート方式(絶対位置決め)
単独運転 PTP(Point to Point)の位置決め運転です。
連結運転 運転データを連結した多段変速位置決め運転です。
位置決め運転 運転機能 運転データを連結したタイマ付位置決め運転です。
連結運転2 タイマ(ドウェル時間)は0∼50.000[s]で設定可能です。
(設定単位:0.001[s])
M0∼M5を選択した後にSTARTを入力した場合に位置決め運転を開始し
運転データ選択方式
ます。
起動方法
STARTを入力する毎に、運転データNo.1から順に位置決め運転を開始し
順送り方式(順送り位置決め)
ます。
速度点数 63点(No.1∼63)
連続運転
変速方法 運転データNo.の切換えをおこないます。
その他の運転 JOG運転 +JOGまたは−JOGを入力することで定寸送りを実行します。
7
Page8
ドライバの特徴[2]
位置決め運転 ●グループ送信機能
(RS-485通信またはネットワークコンバータ経由)
〈運転機能〉 RS-485通信で接続した複数軸でグループを構成し、グループ単位で
●単独運転 指令を送信することができます。
速度 複数軸の同時スタートや同一動作も可能です。
運転データ 運転データ 0号機 位置決め運転開始
No.1 No.2 運転指令
起動 時間 (RS-485通信)
指令 0号機(主軸)の
アクチュエータ動作
●連結運転
速度 1号機(従軸)の
アクチュエータ動作
運転データ 運転データ
No.1 No.2 2号機(従軸)の
起動 時間 アクチュエータ動作
指令
●連結運転2 ●ティーチング機能
ドウェル データ設定器OPX-2A(別売)またはサポートソフトMEXE02✽を
速度 時間
使用して、ティーチングができます。テーブルを目的の位置まで移
運転データ 動し、そのときの位置データを位置決めデータとして記憶します。
No.1 ✽サポートソフトは、WEBサイトからダウンロードできます。
時間
運転データ
No.2
起動
指令
〈起動方法〉
● 運転データ選択方式
● 順送り位置決め
原点復帰運転
●2センサ方式 ●PLS-OUT出力機能
-LS +LS
+側 ─VR ●同期運転が可能
─VS 指令値と同じパルス数、パルス速度の信号を出力します。
─VS PLS-OUT信号と、DIR-OUT信号(回転方向信号)を他のドライバに
-側 ─VR 入力し、別軸のアクチュエータを駆動させることができます。
●3センサ方式 ●位置カウントに利用
-LS HOMES +LS
+側 出力された信号をカウントすることで、アクチュエータへの指令
─VR
─VS 位置を確認できます。
─VS
-側 ─VR
●位置プリセット
連続運転
+方向 時間
アクチュエータ動作
-方向
M0~M5入力
FWD入力
RVS入力
8
Page9
コンパクト電動シリンダ セレクション
■ガイド付タイプ
DRL20G DRL28G DRL42G DRL60G
精度
取付角 ボール 速度[ 動的許容
mm/s] 推力[ 搬質量
N] 可
寸法 ねじ 繰り返し ロスト リード スト [kg] モーメント[N・m]
ローク
[ 位置決め精度 モーション 10 20 30 40 100 110 120 50 100 150 200 250 300
mm] 種類 [mm][mm]
[ P MY MR
mm] [ 平 垂直 M
mm] 水
DRL20G □20 精密 ±0.003[±0.01]✽ 0.02以下 1 25 ~20 ~15 0.5 1 0.1 0.05 0.15
転造 ±0.01 0.05以下
DRL28G □28 1 30 ~40✽ ~30 1 1.5 0.13 0.07 0.3
精密 ±0.003[±0.01]✽ 0.02以下
転造 ±0.01 0.05以下
2 40 ~30✽ ~100 2 5
DRL42G □42 精密 ±0.003[±0.01]✽ 0.02以下 0.5 0.25 0.8
転造 ±0.01 0.05以下 8 40 ~120 ~30 2 3
転造 ±0.01 0.05以下
DRL60G □60 4 50 ~40✽ ~300 3 15 0.6 0.35 2.2
精密 ±0.003[±0.01]✽ 0.02以下
✽条件によって仕様は異なります。詳細は、各製品の仕様をご確認ください。
■テーブル付タイプ
DRL20V DRL28V
精度
取付角 ボール 速度[ 質量 動的許容
mm/s] 推力[ 可搬
N]
寸法 ねじ 繰り返し ロスト リード スト [kg] モーメント[N・m]
[ 位置決め精度 モーション [ ローク
mm] 10 20 30 40 100 110 120 50 100 150 200 250 300
mm] 種類 [mm]
[ 垂直 MP MY MR
mm] [ 水平
mm]
DRL20V □20 精密 ±0.003 0.02以下 1 25 ~20 ~15 1.5 1.5 0.4 0.4 0.8
転造 ±0.01 0.05以下
DRL28V □28 1 30 ~40 ~30 3 3 0.7 0.7 1.5
精密 ±0.003 0.02以下
■ガイドなしタイプ
DRL20 DRL28 DRL42 DRL60
精度
取付角 ボール 速度[ 可搬質量
mm/s] 推力[N]
寸法 ねじ 繰り返し ロスト リード スト [kg]
ローク
[ 位置決め精度 モーション 10 20 30 40 100 110 120 50 100 150 200 250 300
mm] 種類 [mm] [mm]
[ 水平 垂直
mm] [mm]
DRL20 □20 精密 ±0.003 0.02以下 1 25 ~20 ~15 − 1.5
転造 ±0.01 0.05以下
DRL28 □28 1 30、60 ~40✽ ~30 − 3
精密 ±0.003 0.02以下
転造 ±0.01 0.05以下
2 40、100 ~30✽ ~100 − 10
DRL42 □42 精密 ±0.003 0.02以下
転造 ±0.01 0.05以下 8 40、100 ~120 ~30 − 3
転造 ±0.01 0.05以下
DRL60 □60 4 50、100 ~40✽ ~300 − 30
精密 ±0.003 0.02以下
✽条件によって仕様は異なります。詳細は、各製品の仕様をご確認ください。
9
Page10
■用途例
基板のセンタリング CCDカメラのフォーカス XYステージの駆動
ピンリフタ ミラーの位置調整 プローブの上下駆動
ディスペンサの駆動 ポンプの駆動 マイクロプレート用自動分注装置
センサの微調整 流量調整バルブの微調整 ノズルの微調整
10
Page11
仕様表の見方
■テーブル付タイプDRL20Vの場合
● アクチュエータ部
① ② ④ ③
繰り返し 最大負荷モーメント[N·m] MP:0.4 MY:0.4 MR:0.8
位置決め精度[ mm] 精密ボールねじ : 0.02以下
mm] ±0.003 ロストモーション[
走り平行度[mm] 0.03
ストローク 質量[ 最大 最大 最高 最大
Kg]
品名 ボールねじ リード 分解能✽ 最大可搬 推力 保持力 速度 加速度
種類
[mm] [mm] [mm] 水平 垂直 [N] [N] [mm/s] [m/s2]
DRL20V-02B1P ■-KD 25 精密 1 0.002 1.5 1.5 15 15 20 0.2
⑤ ⑥ ⑦ ⑧ ⑨ ⑩ ⑪ ⑫
①繰り返し位置決め精度 ⑧最大可搬質量
同じ位置に同じ方向から繰り返し位置決めをおこなったときに、 ● 水平方向
どれだけの誤差が生じるかを表した値です。 アクチュエータを水平方向で使用する場 図A
合、仕様の運転性能で動かすことのできる
最大質量です。
①は先端位置、②はリニアガイド上での繰り返し位置
決め精度となります。 ● 垂直方向
その他、区別のないものは共通となります。 アクチュエータを垂直方向で使用する場 図B
合、仕様の運転性能で動かすことのできる
②ロストモーション 最大質量です。
ある地点に異なった方向から位置決めをおこなったときに生じ
る差の値です。
③最大負荷モーメント
アクチュエータのガイド中心よりずれた位置にワークをおいた
とき、ガイドを回転させようとする力がはたらきます。このと
⑨最大推力
きのガイドにかけられる最大の力をいいます。 等速運転時、負荷を押し進められる力の最大値です。
MP MY MR
支点 支点
⑩最大保持力
支点 最大保持力は、カレントダウン(停止電流50%)時の保持力です。
電源オフ時の保持力は0になります。電磁ブレーキの最大保持
力は、最大保持力の値と同じになります。
④走り平行度 ⑪最高速度
アクチュエータ取付面からテーブル上面までの高さ方向の振れ 最大可搬質量を搬送できる最高の速度です。
幅です。
⑫最大加速度
⑤ストローク 最大可搬質量を搬送できる最大の加速度です。
負荷を押し引きできる最大の距離です。
⑥リード
モーターが1回転することにより、ねじ軸が直線方向に進む距
離です。
⑦分解能
モーターが1パルス分回転したときに、ねじ軸が移動する距離
です。
11
特 徴 仕様表の見方 システム構成 仕様・外形図 仕様・外形図 仕様・外形図 形図・接続ガイド付タイプ テーブル付タイプ ガイドなしタイプ 一般仕様
仕様・外
ドライバ 組み合わせ一覧 周辺機器
選定計算
取付について
Page12
■品名の見方
DRL 20 G - 02 B 1 P N - K D
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩
① シリーズ名 DRL:DRL シリーズ
② 取付角寸法 20:□20mm 28:□28mm
42:□42mm 60:□60mm
③ 形状 記号なし:ガイドなしタイプ G:ガイド付タイプ
V:テーブル付タイプ
④ ストローク 02∼10:25∼100mm
⑤ ボールねじ種類 A:転造ボールねじ B:精密ボールねじ
⑥ リード 1:1mm 2:2mm 4:4mm 8:8mm
⑦ モーター種類 P:標準 M:高分解能
⑧ 付加機能 記号なし:機能なし N:調整ノブ付
M:電磁ブレーキ付
⑨ 電圧 K:DC24V
⑩ ドライバ種類 D:位置決め機能内蔵
12
Page13
■システム構成
● 位置決め機能内蔵タイプ
I/O制御または、RS-485通信で使用した場合の構成例です。 ✽1 I/O制御の駆動に必要です。
✽2 お客様にてご用意ください。
✽3 サポートソフトはWEBサイトから無料でダウンロードできます。
ケーブル(別売) 周辺機器(別売)✽1
EMC指令の評価で
使用しているケーブルです データ設定器 サポートソフト用
( ➜ 49ページ) 通信ケーブル
( ➜ 50ページ)
または
接続ケーブル(延長用)
( ➜ 51ページ)
DRL シリーズ サポートソフト
( MEXE02✽3
RS485通信の場合)
コンパクト
電動シリンダ ドライバ
USB
ポートへ
コンピュータ✽1 ✽2
(お客様にて接続が
必要です。)
プログラマブル
リミットセンサ✽2 コントローラ✽2
DC24V
電源✽2
ケーブル・周辺機器(別売) ネットワークコンバータ(別売)
取付プレート 接続ケーブル RS-485通信用ケーブル ( ➜ 53ページ)
( ➜ 48ページ) ( ➜ 51ページ) ( ➜ 52ページ)
● 本製品の操作方法を記載したユーザーズマニュアルをご用意しています。詳細については、お近くの支店、営業所にお問い合わせいただくか、
オリエンタルモーターWEBサイトからダウンロードしてください。https://www.orientalmotor.co.jp/
●システム構成価格例
別売
DRL シリーズ データ設定器 接続ケーブル
(延長用)・ 取付プレート
5m
DRL42G-04A2P-KD OPX-2A CC05PK5 PADRL-42
76,700円 16,500円 3,800円 20,600円
● 上記システム構成は一例です。他の組み合わせもございます。
13
特 徴 仕様表の見方 システム構成 仕様・外形図 仕様・外形図 仕様・外形図 ・外形図・接続 計算ガイド付タイプ テーブル付タイプ ガイドなしタイプ 一般仕様
仕様
ドライバ 組み合わせ一覧 周辺機器
選定
取付について
Page14
ガイド付タイプ DRL20G DC24V
最大推力:15N、ストローク:25mm
■仕様
● アクチュエータ部
繰り返し ①±0.003
位置決め精度[mm] ②± ロストモーション[mm]精密ボールねじ : 0.02以下 最大負荷モーメント[N·m] MP:0.1 MY:0.05 MR:0.15
0.01
ストローク リード 分解能✽ 最大可搬質量[Kg] 最大 最大 最高 最大
ボールねじ 推力 保持力 速度 加速度
品名 種類 水平 垂直
[mm] [mm] [mm] (図A) (図B) [N] [N] [mm/s] [m/s2]
DRL20G-02B1P ■-KD 25 精密 1 0.002 0.5 1 15 15 20 0.2
● 品名中の■には、付加機能を表す記号N(調整ノブ付)が入ります。付加機能無は■に記号は入りません。
✽ 分解能は16種類から設定することができます。
ご注意
● アクチュエータ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
● 繰り返し位置決め精度 ● 負荷モーメント ● 最大可搬質量
MP MY MR 図A 図B
支点 支点
支点
①は先端位置、②はリニアガイド上での
繰り返し位置決め精度となります。
その他、区別のないものは共通となります。
■種類と価格
● 精密ボールねじ
品名 定価 ストローク リード モーター
[mm] [ 付加 能
mm] 種類 機
DRL20G-02B1P-KD 132,000円 25 1 標準 なし
DRL20G-02B1PN-KD 135,300円 25 1 標準 調整ノブ
製品には、次のものが含まれています
アクチュエータ、ドライバ、電源コネクタ(CN1)、接続ケーブル(入出力信
号用、CN2)、接続ケーブル(アクチュエータ接続用、CN4)、接続ケーブル(ア
クチュエータのコネクタ接続用)、取扱説明書
14
Page15
ガイド付タイプ DRL28G DC24V
最大推力:30N、ストローク:30mm
■仕様
● アクチュエータ部
繰り返し 転造ボールねじ : ±0.01 : 0.05以下
位置決め精度[ ント[N·m]MP:0.13 MY:0.07 MR:0.3
mm]精密ボールねじ : ①± モーション[mm]転造ボールねじ
0.003、②± ロスト
0.01 精密ボールねじ : 0.02以下 最大負荷モーメ
ストローク リード 分解能✽ 最大可搬質量[ 最大 最大 最高 最大
Kg] 推力 保持力 速度 加速度
品名 ボールねじ
種類 水平 垂直
[mm] [mm] [mm] (図A) (図B) [N] [N] [mm/s] [m/s2]
DRL28G-03A1P ■-KD 転造
0.002 40
DRL28G-03B1P ■-KD 30 1 1 1.5 30 30 0.2
精密
DRL28G-03B1M ■-KD 0.001 24
● 品名中の■には、付加機能を表す記号N(調整ノブ付)が入ります。付加機能無は■に記号は入りません。
✽ 分解能は16種類から設定することができます。
ご注意
● アクチュエータ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
● 繰り返し位置決め精度 ● 負荷モーメント ● 最大可搬質量
MP MY MR 図A 図B
支点 支点
支点
①は先端位置、②はリニアガイド上での
繰り返し位置決め精度となります。
その他、区別のないものは共通となります。
■種類と価格
● 転造ボールねじ
品名 定価 ストローク リード モーター
[ 能
mm] [mm] 種類 付加機
DRL28G-03A1P-KD 85,500円 30 1 標準 なし
DRL28G-03A1PN-KD 88,800円 30 1 標準 調整ノブ
● 精密ボールねじ
品名 定価 ストローク リード モーター
[mm] [mm] 種類 付加機能
DRL28G-03B1P-KD 122,300円 30 1 標準 なし
DRL28G-03B1PN-KD 125,600円 30 1 標準 調整ノブ
DRL28G-03B1M-KD 127,800円 30 1 高分解能 なし
DRL28G-03B1MN-KD 131,100円 30 1 高分解能 調整ノブ
製品には、次のものが含まれています
アクチュエータ、ドライバ、電源コネクタ(CN1)、接続ケーブル(入出力信
号用、CN2)、接続ケーブル(アクチュエータ接続用、CN4)、接続ケーブル(ア
クチュエータのコネクタ接続用)、取扱説明書
15
特 徴 仕様表の見方 システム構成 仕様・外形図 仕様・外形図 仕様・外形図 ・外形図・接続ガイド付タイプ テーブル付タイプ ガイドなしタイプ 一般仕様
仕様
ドライバ 組み合わせ一覧 周辺機器
選定計算
取付について
Page16
ガイド付タイプ DRL42G DC24V
最大推力:100N、ストローク:40mm
■仕様
● アクチュエータ部
繰り返し 転造ボールねじ : ±0.01
位置決め精度[mm]精密ボールねじ ロストモーション[mm]転造ボールねじ : 0.05以下
: ①±0.003、②±0.01 精密ボールねじ : 0.02以下 最大負荷モーメント[N·m]MP:0.5 MY:0.25 MR:0.8
ストローク リード 分解能✽ 最大可搬質量[ 最大 最高
Kg] 最大 最大
ボールねじ 推力 保持力 速度 加速度
品名 種類 水平 垂直
[mm] [mm] [mm] (図A) (図B) [N] [N] [mm/s] [m/s2]
DRL42G-04A2P ■-KD 2 0.004 5 100 100 30 0.4
転造
DRL42G-04A8P ■-KD 8 0.016 3 30 30 120 1
40 2
DRL42G-04B2P ■-KD 0.004 30 0.4
精密 2 5 100 100
DRL42G-04B2M ■-KD 0.002 15 0.2
● 品名中の■には、付加機能を表す記号N(調整ノブ付)またはM(電磁ブレーキ付)が入ります。付加機能無は■に記号は入りません。
✽ 分解能は16種類から設定することができます。
ご注意
● アクチュエータ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
● 繰り返し位置決め精度 ● 負荷モーメント ● 最大可搬質量
MP MY MR 図A 図B
支点 支点
支点
①は先端位置、②はリニアガイド上での
繰り返し位置決め精度となります。
その他、区別のないものは共通となります。
■種類と価格
● 転造ボールねじ
品名 定価 ストローク リード モーター
[ 付加 能
m] [ 機
m mm] 種類
DRL42G-04A2P-KD 76,700円 40 2 標準 なし
DRL42G-04A2PN-KD 80,300円 40 2 標準 調整ノブ
DRL42G-04A2PM-KD 96,500円 40 2 標準 電磁ブレーキ
DRL42G-04A8P-KD 86,600円 40 8 標準 なし
DRL42G-04A8PN-KD 90,200円 40 8 標準 調整ノブ
DRL42G-04A8PM-KD 106,400円 40 8 標準 電磁ブレーキ
● 精密ボールねじ
品名 定価 ストローク リード モーター
[mm] [ 能
mm] 種類 付加機
DRL42G-04B2P-KD 116,800円 40 2 標準 なし
DRL42G-04B2PN-KD 120,300円 40 2 標準 調整ノブ
DRL42G-04B2PM-KD 136,600円 40 2 標準 電磁ブレーキ
DRL42G-04B2M-KD 122,300円 40 2 高分解能 なし
DRL42G-04B2MN-KD 125,800円 40 2 高分解能 調整ノブ
DRL42G-04B2MM-KD 142,100円 40 2 高分解能 電磁ブレーキ
製品には、次のものが含まれています
アクチュエータ、ドライバ、電源コネクタ(CN1)、接続ケーブル(入出力信
号用、CN2)、接続ケーブル(アクチュエータ接続用、CN4)、バリスタ✽1、
接続ケーブル(アクチュエータのコネクタ接続用)✽2、取扱説明書
✽ 1 電磁ブレーキ付のみ ✽ 2 高分解能モーター仕様のみ
16
Page17
ガイド付タイプ DRL60G DC24V
最大推力:300N、ストローク:50mm
■仕様
● アクチュエータ部
繰り返し 転造ボールねじ : ±0.01 じ : 0.05以下
位置決め精度[ メント[N·m] MP:0.6 MY:0.35 MR:2.2
mm]精密ボールねじ : ①± トモーション[ 転造ボールね
mm]
0.003、②± ロス
0.01 精密ボールねじ : 0.02以下 最大負荷モー
ストローク リード 分解能✽ 最大可搬質量[ 最大 最大 最高 最大
Kg] 推力 保持力 速度 加速度
品名 ボールねじ
種類 水平 垂直
[mm] [mm] [mm] (図A) (図B) [N] [N] [mm/s] [m/s2]
DRL60G-05A4P ■-KD 転造
0.008 40
DRL60G-05B4P ■-KD 50 4 3 15 300 300 0.26
精密
DRL60G-05B4M ■-KD 0.004 22
● 品名中の■には、付加機能を表す記号N(調整ノブ付)またはM(電磁ブレーキ付)が入ります。付加機能無は■に記号は入りません。
✽ 分解能は16種類から設定することができます。
ご注意
● アクチュエータ表面温度は90˚C以下でお使いください。精度は一定温度、一定負荷での値です。
● 周囲温度やモーターケーブルの長さにより最高速度が低下する場合があります。
● 繰り返し位置決め精度 ● 負荷モーメント ● 最大可搬質量
MP MY MR 図A 図B
支点 支点
支点
①は先端位置、②はリニアガイド上での
繰り返し位置決め精度となります。
その他、区別のないものは共通となります。
■種類と価格
● 転造ボールねじ
品名 定価 ストローク リード モーター
[mm] [mm] 種類 付加機能
DRL60G-05A4P-KD 91,000円 50 4 標準 なし
DRL60G-05A4PN-KD 94,900円 50 4 標準 調整ノブ
DRL60G-05A4PM-KD 113,000円 50 4 標準 電磁ブレーキ
● 精密ボールねじ
品名 定価 ストローク リード モーター
[mm] [mm] 種類 付加機能
DRL60G-05B4P-KD 128,900円 50 4 標準 なし
DRL60G-05B4PN-KD 132,700円 50 4 標準 調整ノブ
DRL60G-05B4PM-KD 150,900円 50 4 標準 電磁ブレーキ
DRL60G-05B4M-KD 134,400円 50 4 高分解能 なし
DRL60G-05B4MN-KD 138,200円 50 4 高分解能 調整ノブ
DRL60G-05B4MM-KD 156,400円 50 4 高分解能 電磁ブレーキ
製品には、次のものが含まれています
アクチュエータ、ドライバ、電源コネクタ(CN1)、接続ケーブル(入出力信
号用、CN2)、接続ケーブル(アクチュエータ接続用、CN4)、バリスタ✽1、
接続ケーブル(アクチュエータのコネクタ接続用)✽2、取扱説明書
✽ 1 電磁ブレーキ付のみ ✽ 2 高分解能モーター仕様のみ
17
特 徴 仕様表の見方 システム構成 仕様・外形図 仕様・外形図 仕様・外形図 形図・接続ガイド付タイプ テーブル付タイプ ガイドなしタイプ 一般仕様
仕様・外
ドライバ 組み合わせ一覧 周辺機器
選定計算
取付について
Page18
■外形図( 単位 mm)
● アクチュエータ部 ガイド付タイプ
DRL20G
品名 アクチュエータ部 品名 質量 kg 2D CAD
DRL20G-02B1P-KD DRLM20G-02B1P-K 0.14 D3413
DRL20G-02B1PN-KD DRLM20G-02B1PN-K 0.15 D3414
10
4×M2 深さ4
4×M2
5 2
18±0.3 47.8±0.5 A-A
2∼27 69
4.5 19
調整ノブ
A
A
8 3 7.5 11 5
(10.5) 50 2×M2 深さ4
±1 1.5 16±0.3
60.5±2 21∼46(有効ストローク25) 20
● 接続ケーブル(0.6m)を付属しています。UL Style 3265, AWG24
◇ 取付プレート参考図
ガイド付タイプを取り付ける場合は、取付プレートをお客様にてご用意いただく必要があります。
取付プレートのインロー受け(貫通穴)には、ストッパ(ボールねじ)の逃げ溝を設けてください。
また周辺機器として、取付プレート(別売)をご用意しています。 ➜ 48ページ
緩めない C
外さない G
ジョイント
ϕE
(インロー受け)
緩めない 4×ϕD
インロー
ストッパ
逃げ溝
品名 C ϕD ϕE F G
DRLM20G 16±0.1 ϕ2.3 ϕ16+0.018
0 (H7) 11 10
インロー受け(貫通穴)
取付プレート
ベースプレート
● 取り付けについての詳細は取扱説明書をご覧ください。
● の外形図は調整ノブ付のものです。付加機能無の場合、 色部分の調整ノブはありません。
18
ϕ16
12±0.3
11.4 (19)
ϕ8 1
0
ϕ16−0.018(h7)
16±0.3
15±0.3 ϕ2.3
R3
5 1
13.8
20 17.2±0.5
C
F
Page19
DRL28G
品名 アクチュエータ部 品名 質量 kg 2D CAD
DRL28G-03□1P-KD DRLM28G-03□1P-K 0.26 D3415
DRL28G-03□1PN-KD DRLM28G-03□1PN-K 0.27 D3417
DRL28G-03B1M-KD DRLM28G-03B1M-K 0.26 D3419
DRL28G-03B1MN-KD DRLM28G-03B1MN-K 0.27 D3420
0.5 10.4 4×M2.5 深さ3.5
6 2 4×M2.5
18±0.3 55.8±0.5 A-A
25
1.5∼31.5 77.3 23
調整ノブ R3
A
A ϕ2
8 5 5 2×M2 12 2− 0
.5 0.02
3 23 (1
±0.3 h7)
(10.5) 58±1 1.5 28
68.5±2 21∼51
(有効ストローク 30)
● 接続ケーブル(0.6m)を付属しています。UL Style 3265, AWG24
◇ 取付プレート参考図
ガイド付タイプを取り付ける場合は、取付プレートをお客様にてご用意いただく必要があります。
取付プレートのインロー受け(貫通穴)には、ストッパ(ボールねじ)の逃げ溝を設けてください。
また周辺機器として、取付プレート(別売)をご用意しています。 ➜ 48ページ
緩めない C
外さない G
ジョイント
ϕE
(インロー受け)
緩めない 4×ϕD
インロー
ストッパ
逃げ溝
品名 C ϕD ϕE F G
DRLM28G 23±0.1 ϕ3 ϕ22+0.021
0 (H7) 15 15
インロー受け(貫通穴)
取付プレート
ベースプレート
● 取り付けについての詳細は取扱説明書をご覧ください。
● 品名中の□には、ボールねじ種類を表すA(転造ボールねじ)またはB(精密ボールねじ)が入ります。
● の外形図は調整ノブ付のものです。付加機能無の場合、 色部分の調整ノブはありません。
19
ϕ20 12±0.3 5
ϕ8 1
16±0.3 15±0.5 ϕ3
C 5 1
16.5
F
23±0.3
28
32.5
特 徴 仕様表の見方 システム構成 仕様・外形図 仕様・外形図 仕様・外形図ガイド付タイプ テーブル付タイプ ガイドなしタイプ 一般仕様
仕様・外形図・接続
ドライバ 組み合わせ一覧 周辺機器
選定計算
取付について
Page20
DRL42G
品名 アクチュエータ部 品名 質量 kg 2D CAD
DRL42G-04□2P-KD DRLM42G-04□2P-K 0.8 D3421
DRL42G-04□2PN-KD DRLM42G-04□2PN-K 0.8 D3422
DRL42G-04A8P-KD DRLM42G-04A8P-K 0.8 D3423
DRL42G-04A8PN-KD DRLM42G-04A8PN-K 0.8 D3424
4×M4 深さ5.5
24±0.3 82±0.5
42
37
3∼43 111 31 2×M4
モーターリード線
5本600mm
UL Style 3265, AWG26
調整ノブ
25− 0
0.021(h7
8 6 7.5 )
16
4×M4 深さ8
(10.5) 86±1 2 31±0.3
96.5±2 28∼68(有効ストローク40)
DRL42G
品名 アクチュエータ部 品名 質量 kg 2D CAD
DRL42G-04□2PM-KD DRLM42G-04□2PM-K 1 D3425
DRL42G-04A8PM-KD DRLM42G-04A8PM-K 1 D3426
4×M4 深さ5.5
2×M4
24±0.3 82±0.5 42 モーターリード線
37 5本 600mm
UL Style 3265, AWG26
3∼43 111 31
電磁ブレーキリード線
2本 600mm
UL Style 1430, AWG22
25− 0
0.021(h7)
6 7.5 16
(33) 86 4×M4 深さ8
±1 2 31±0.3
119±2 28∼68(有効ストローク40)
● 品名中の□には、ボールねじ種類を表すA(転造ボールねじ)またはB(精密ボールねじ)が入ります。
● の外形図は調整ノブ付のものです。付加機能無の場合、 色部分の調整ノブはありません。
20
19±0.3
ϕ28 19±0.3
ϕ14
ϕ14
31±0.3
20±0.3 20±0.5
31±0.3
20±0.3 20±0.5 R4
R4
42
48
42
48