


生産現場のニーズに対応する、アブソリュートセンサ搭載小型制御モーター
近年の人材不足などを背景に「人の作業を代替するロボット」のニーズが高まり、
必要な作業、動作にあったロボットを求めて
新規設計や、より小型のロボットが検討されるシーンが増えています。
AZシリーズは、アブソリュートシステムをバッテリレスで構築できる
機械式センサを搭載した小型の制御モーターです。
いま広がるロボットの小型化・製作ニーズに応えます。
◆詳細はカタログをダウンロードしご覧いただくか、お気軽にお問い合わせ下さい。
このカタログについて
| ドキュメント名 | 小型化や自作など新たなロボット需要に |
|---|---|
| ドキュメント種別 | 事例紹介 |
| ファイルサイズ | 3.1Mb |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
設計にパッと活かせる 小型化や自作など
WEBコンテンツ紹介! 新たなロボット需要に
真似するだけで、プログラムできる 簡易シーケンスや各機能の活用事例 検索
ハイブリッド制御システム
「運転中に外部信号で、運転を切り替え
たい」「エリア信号をカスタマイズした AZシリーズ
い」といった場面を想定した事例を
WEBで公開しています。
生産現場のニーズに対応する、アブソリュートセンサ搭載小型制御モーター
近年の人材不足などを背景に「人の作業を代替するロボット」のニーズが高まり、必要な作業、動作にあったロボットを求めて
新規設計や、より小型のロボットが検討されるシーンが増えています。
AZシリーズは、アブソリュートシステムをバッテリレスで構築できる機械式センサを搭載した小型の制御モーター。
いま広がるロボットの小型化・製作ニーズに応えます。
組み合わせるだけで、設計できる サンプルCADデータ 検索
ロボットの
位置決めピンやねじのサイズ、位置情報 ロボットを 調整が面倒で使いづらい
があらかじめ考慮されているため、機械 こんなお悩みは もっと小型化
設計の手間削減に貢献します。
ありませんか? したい
単機能でシンプルな
ロボットを製作したいが
手間がかかる
シンプルな小型ロボット製作にはAZシリーズが最適です!
POINT POINT POINT POINT
見るだけで、設定できる 使い方ナビ 検索 1 2 3 4
配線などの運転準備から、位置決め運 状態を監視し、 ハイブリッド制御 さまざまな
エンドエフェクタ
転の基本設定、様々な運転パターンの 変化に柔軟に による応答性と インターフェイス
設定方法を動画でご紹介しています。 にも最適
対応 信頼性の向上 に対応
ニーズに合ったさまざまなロボットの製作が可能
お客様ご相談センター
製品に関する技術的なお問い合わせ、お見積、ご注文はこちらまで。携帯電話からもご利用可能です。 https://www.orientalmotor.co.jp/
受付時間 平日 / 9:00~ 19:00
(土日祝日・その他当社規定による休日を除く) TEL 0120-925-410 FAX 0120-925-601
21X 10000ZY G-154-3
2021年10月制作
000-031330.indd 1 2021/11/19 15:31:21
Page2
小型ロボット製作に最適なAZシリーズ
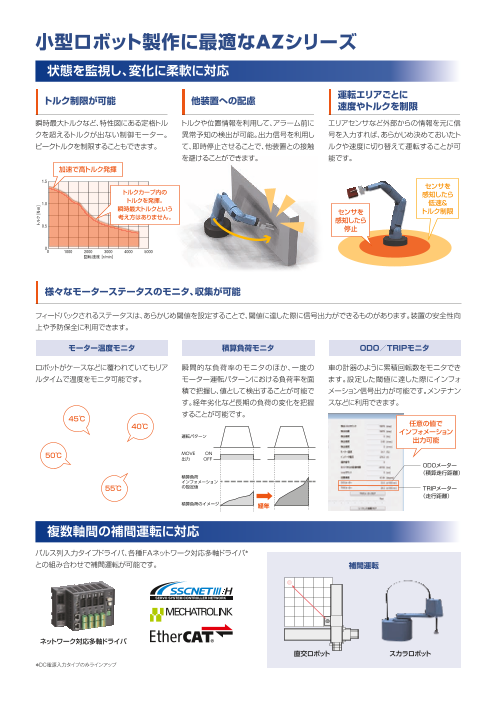
状態を監視し、変化に柔軟に対応 ハイブリッド制御による応答性と信頼性の向上
は“オープンループ制御”の利点と
トルク制限が可能 他装置への配慮 運転エリアごとに 入 通常時
速度やトルクを制限 “クローズドループ制御”の利点を“ハイブ 力 入力カウンタ
信 励 ステッピングモーターと同様
リッド”した独自制御をおこなう、ステッピン 号 過 磁 に、オープンモードで制御を
瞬時最大トルクなど、特性図にある定格トル トルクや位置情報を利用して、アラーム前に エリアセンサなど外部からの情報を元に信 負 シ
グモーターベースのモーターです。通常時 荷 ー 出 おこないます。
クを超えるトルクが出ない制御モーター。 異常予知の検出が可能。出力信号を利用し 号を入力すれば、あらかじめ決めておいたト 位置偏差カウンタ 領 ケ 力 モーター
は、指令に同期してオープンループ制御で 域 ン 素
ピークトルクを制限することもできます。 て、即時停止させることで、他装置との接触 ルクや速度に切り替えて運転することが可 判 ス 子 過負荷時
高応答で運転。過負荷時は、即座にクロー 別 制 センサ
御 クローズドモードに切り替わ
を避けることができます。 能です。 ズドループによる制御に切り替わり、位置の ローター位置 部 り、運転を継続します。
加速で高トルク発揮 カウンタ
補正をおこないます。
1.5
センサを
トルクカーブ内の 感知したら
1.0 トルクを発揮。 低速&
瞬時最大トルクという センサを トルク制限 急峻な動き・ ゲイン調整不要 バッテリ不要のアブソリュート
考え方はありません。 感知したら
0.5 負荷変動にも追従 センサ<ABZO>搭載
停止
指令に対して遅れないオープンループ制御の 通常時はオープンループ制御のため、応答 アブソリュートシステムだから原点などの外
0
0 1000 2000 3000 4000 5000 応答性が機敏な動きを実現。急激な負荷変 性は速いのにゲイン調整は不要で、手間が 部センサを削減でき、省配線でコンパクトな
回転速度 [r/min]
動にはクローズドループ制御で対応します。 かかりません。 構成に貢献します。
ピタ 機械式多回転アブソリュートセンサ〈ABZO〉
負荷 軽 負荷 重 ッ! を採用しているため、データ保持のための
様々なモーターステータスのモニタ、収集が可能
整定時間 バッテリは不要。バッテリのコストやトラブ
ル、メンテナンス
フィードバックされるステータスは、あらかじめ閾値を設定することで、閾値に達した際に信号出力ができるものがあります。装置の安全性向 が短い
時期を気にする必
上や予防保全に利用できます。 要がありません。
ABZOセンサ
モーター温度モニタ 積算負荷モニタ ODO/TRIPモニタ
ロボットがケースなどに覆われていてもリア 瞬間的な負荷率のモニタのほか、一度の 車の計器のように累積回転数をモニタでき さまざまな制御インターフェイスに対応
ルタイムで温度をモニタ可能です。 モーター運転パターンにおける負荷率を面 ます。設定した閾値に達した際にインフォ
●FAネットワークのI/Oスレーブ的な位置 ● I/Oで ●コンピュータまたは ●シリアル通信で ●FAネットワークで
積で把握し、値として検出することが可能で メーション信号出力が可能です。メンテナン
づけで、I/O感覚でモーターを制御 制御する場合 タッチパネルから 制御する場合 制御する場合
す。経年劣化など長期の負荷の変化を把握 スなどに利用できます。 制御する場合 CPU
●データ設定ソフトから簡単にデータ設定、 CPU 位置決め CPU
ユニット シリアル通信 FA ネットワーク
45℃ することが可能です。 電源
電源 I/O 不要 電源 ユニット ユニット
モニタが可能
40℃ 任意の値で
インフォメーション (ソフトは無料でダウンロードできます)
運転パターン
出力可能
50℃ MOVE ON FAネットワーク
出力 OFF
ODOメーター ネットワーク
(積算走行距離) 運転データ設定 I/O Modbus(RTU) Modbus(RTU) コンバータ
積算負荷
インフォメーション パラメータ変更
の設定値 RS-485
55℃ TRIPメーター
(走行距離)
積算負荷のイメージ データ設定ソフト モーターの運転に必要な情報をドライバに持たせるため、上位PLCの負担が軽
経年 MEXE02 減します。複数軸制御の場合のシステム構成がシンプルになります。
RS-485通信による設定も可能です。 データ設定ソフト、もしくはRS-485通信による設定となります。
複数軸間の補間運転に対応
パルス列入力タイプドライバ、各種FAネットワーク対応多軸ドライバ* 簡易シーケンス機能
との組み合わせで補間運転が可能です。 補間運転
プログラムを簡略化 機構リードの設定は小数点まで可能
AZシリーズの位置決め機能内蔵タイプに サポートソフトMEXE02のユーザー単位
は、連結運転や運転間のタイマ設定、条件 系設定支援ウィザードをご用意。使用する
MEXE02
分岐、ループ回数などの豊富なシーケンス 機構に合わせた単位の設定・表示ができる
ネットワーク対応多軸ドライバ 機能を搭載。上位シーケンスプログラムを ので、単位換算の手間を省き、運転データ
直交ロボット スカラロボット 簡略化できます。 の入力が簡単です。
*DC電源入力タイプのみラインアップ AZシリーズ
000-031330.indd 2 2021/11/19 15:31:24
トルク [N·m]
Page3
小型ロボット製作に最適なAZシリーズ
状態を監視し、変化に柔軟に対応 ハイブリッド制御による応答性と信頼性の向上
は“オープンループ制御”の利点と
トルク制限が可能 他装置への配慮 運転エリアごとに 入 通常時
速度やトルクを制限 “クローズドループ制御”の利点を“ハイブ 力 入力カウンタ
信 励 ステッピングモーターと同様
リッド”した独自制御をおこなう、ステッピン 号 過 磁 に、オープンモードで制御を
瞬時最大トルクなど、特性図にある定格トル トルクや位置情報を利用して、アラーム前に エリアセンサなど外部からの情報を元に信 負 シ
グモーターベースのモーターです。通常時 荷 ー 出 おこないます。
クを超えるトルクが出ない制御モーター。 異常予知の検出が可能。出力信号を利用し 号を入力すれば、あらかじめ決めておいたト 位置偏差カウンタ 領 ケ 力 モーター
は、指令に同期してオープンループ制御で 域 ン 素
ピークトルクを制限することもできます。 て、即時停止させることで、他装置との接触 ルクや速度に切り替えて運転することが可 判 ス 子 過負荷時
高応答で運転。過負荷時は、即座にクロー 別 制 センサ
御 クローズドモードに切り替わ
を避けることができます。 能です。 ズドループによる制御に切り替わり、位置の ローター位置 部 り、運転を継続します。
加速で高トルク発揮 カウンタ
補正をおこないます。
1.5
センサを
トルクカーブ内の 感知したら
1.0 トルクを発揮。 低速&
瞬時最大トルクという センサを トルク制限 急峻な動き・ ゲイン調整不要 バッテリ不要のアブソリュート
考え方はありません。 感知したら
0.5 負荷変動にも追従 センサ<ABZO>搭載
停止
指令に対して遅れないオープンループ制御の 通常時はオープンループ制御のため、応答 アブソリュートシステムだから原点などの外
0
0 1000 2000 3000 4000 5000 応答性が機敏な動きを実現。急激な負荷変 性は速いのにゲイン調整は不要で、手間が 部センサを削減でき、省配線でコンパクトな
回転速度 [r/min]
動にはクローズドループ制御で対応します。 かかりません。 構成に貢献します。
ピタ 機械式多回転アブソリュートセンサ〈ABZO〉
負荷 軽 負荷 重 ッ! を採用しているため、データ保持のための
様々なモーターステータスのモニタ、収集が可能
整定時間 バッテリは不要。バッテリのコストやトラブ
ル、メンテナンス
フィードバックされるステータスは、あらかじめ閾値を設定することで、閾値に達した際に信号出力ができるものがあります。装置の安全性向 が短い
時期を気にする必
上や予防保全に利用できます。 要がありません。
ABZOセンサ
モーター温度モニタ 積算負荷モニタ ODO/TRIPモニタ
ロボットがケースなどに覆われていてもリア 瞬間的な負荷率のモニタのほか、一度の 車の計器のように累積回転数をモニタでき さまざまな制御インターフェイスに対応
ルタイムで温度をモニタ可能です。 モーター運転パターンにおける負荷率を面 ます。設定した閾値に達した際にインフォ
●FAネットワークのI/Oスレーブ的な位置 ● I/Oで ●コンピュータまたは ●シリアル通信で ●FAネットワークで
積で把握し、値として検出することが可能で メーション信号出力が可能です。メンテナン
づけで、I/O感覚でモーターを制御 制御する場合 タッチパネルから 制御する場合 制御する場合
す。経年劣化など長期の負荷の変化を把握 スなどに利用できます。 制御する場合 CPU
●データ設定ソフトから簡単にデータ設定、 CPU 位置決め CPU
ユニット シリアル通信 FA ネットワーク
45℃ することが可能です。 電源
電源 I/O 不要 電源 ユニット ユニット
モニタが可能
40℃ 任意の値で
インフォメーション (ソフトは無料でダウンロードできます)
運転パターン
出力可能
50℃ MOVE ON FAネットワーク
出力 OFF
ODOメーター ネットワーク
(積算走行距離) 運転データ設定 I/O Modbus(RTU) Modbus(RTU) コンバータ
積算負荷
インフォメーション パラメータ変更
の設定値 RS-485
55℃ TRIPメーター
(走行距離)
積算負荷のイメージ データ設定ソフト モーターの運転に必要な情報をドライバに持たせるため、上位PLCの負担が軽
経年 MEXE02 減します。複数軸制御の場合のシステム構成がシンプルになります。
RS-485通信による設定も可能です。 データ設定ソフト、もしくはRS-485通信による設定となります。
複数軸間の補間運転に対応
パルス列入力タイプドライバ、各種FAネットワーク対応多軸ドライバ* 簡易シーケンス機能
との組み合わせで補間運転が可能です。 補間運転
プログラムを簡略化 機構リードの設定は小数点まで可能
AZシリーズの位置決め機能内蔵タイプに サポートソフトMEXE02のユーザー単位
は、連結運転や運転間のタイマ設定、条件 系設定支援ウィザードをご用意。使用する
MEXE02
分岐、ループ回数などの豊富なシーケンス 機構に合わせた単位の設定・表示ができる
ネットワーク対応多軸ドライバ 機能を搭載。上位シーケンスプログラムを ので、単位換算の手間を省き、運転データ
直交ロボット スカラロボット 簡略化できます。 の入力が簡単です。
*DC電源入力タイプのみラインアップ AZシリーズ
000-031330.indd 3 2021/11/19 15:31:24
トルク [N·m]
Page4
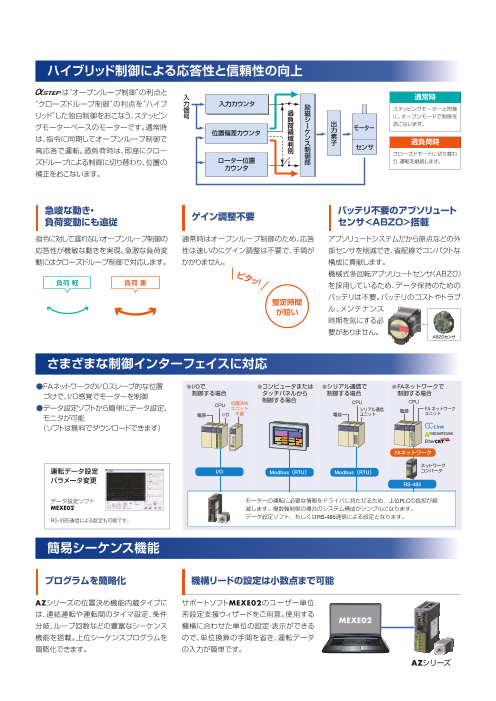
ロボットのエンドエフェクタにも最適
エンドエフェクタでの活用例 把持力調整・把持確認
モータートルクの設定で、把持力の設定が可能です。
また、ワークの把持力判定を信号で確認することもできます。
例1:低推力でつかむ→徐々に力を加えていく
AZシリーズでは押し当て力と時間を自在に変更することが可能です。
握りこみが可能です
チャック・グリップ カメラの上下駆動 ディスペンサ ねじ締め 圧入
押し付け(把持力)制御、トルク制限 正確なピント調整、 トルク制限、
微細な吐出量コントロール、保持力 締め付け時に設定したトルクで信号を出力
バッテリレスアブソリュートセンサ搭載で小型・軽量
小型・軽量のため、ハンドが組み付いたロ ① ② ③ 時間
①最初は力を抑えてつかむ ②徐々に強い力でつかむ ③さらに強い力でつかむ
●小型ラインアップ ボット・機構への負荷低減に貢献します。
(DC電源入力)
取付角寸法: □20mm、□28mm
軽負荷 例2:直前まで素早く→ゆっくりつかむ
高速でワークに接近。当たる直前に減速して、低速で押し付けることができます。
ワークに衝撃を与えません
50mm 20mm
①
取付角寸法
20mm 34mm ②
質量 80g
③
①ワークまで高速で接近 ②ワークをつかむ直前で減速、 ③ワークをつかんだあと、 時間
バッテリレスアブソリュートセンサ搭載で小型・ギヤ付、直動機構 ゆっくりワークをつかむ 押し当て運転を開始
●小型ギヤードラインアップ ●電動グリッパ 例3:ワークを判定する
(DC電源入力) EHシリーズ
取付角寸法: 型番: AREA信号とTLC信号を合わせて出力することにより、ワークの判定をおこなえます。
PSギヤードタイプ □28mm 幅42.5mm×高さ36mm ●AREA信号:モーターが設定されたエリア内にいるとき、出力される信号です。
TLC出力:押し当て運転中、出力トルクが設定したトルク制限値に達すると出力される信号です。
ハーモニックギヤードタイプ □30mm
●コンパクトリニアアクチュエータ
DRシリーズ
取付角ーストローク
□28mmーストローク30mm
①OK(公差内) ②NG(公差外) ③NG(ワークの入れ忘れ)
000-031330.indd 4 2021/11/19 15:31:46
移動速度 [mm/sec] 押し当て力 [N]
Page5
ロボットのエンドエフェクタにも最適
エンドエフェクタでの活用例 把持力調整・把持確認
モータートルクの設定で、把持力の設定が可能です。
また、ワークの把持力判定を信号で確認することもできます。
例1:低推力でつかむ→徐々に力を加えていく
AZシリーズでは押し当て力と時間を自在に変更することが可能です。
握りこみが可能です
チャック・グリップ カメラの上下駆動 ディスペンサ ねじ締め 圧入
押し付け(把持力)制御、トルク制限 正確なピント調整、 トルク制限、
微細な吐出量コントロール、保持力 締め付け時に設定したトルクで信号を出力
バッテリレスアブソリュートセンサ搭載で小型・軽量
小型・軽量のため、ハンドが組み付いたロ ① ② ③ 時間
①最初は力を抑えてつかむ ②徐々に強い力でつかむ ③さらに強い力でつかむ
●小型ラインアップ ボット・機構への負荷低減に貢献します。
(DC電源入力)
取付角寸法: □20mm、□28mm
軽負荷 例2:直前まで素早く→ゆっくりつかむ
高速でワークに接近。当たる直前に減速して、低速で押し付けることができます。
ワークに衝撃を与えません
50mm 20mm
①
取付角寸法
20mm 34mm ②
質量 80g
③
①ワークまで高速で接近 ②ワークをつかむ直前で減速、 ③ワークをつかんだあと、 時間
バッテリレスアブソリュートセンサ搭載で小型・ギヤ付、直動機構 ゆっくりワークをつかむ 押し当て運転を開始
●小型ギヤードラインアップ ●電動グリッパ 例3:ワークを判定する
(DC電源入力) EHシリーズ
取付角寸法: 型番: AREA信号とTLC信号を合わせて出力することにより、ワークの判定をおこなえます。
PSギヤードタイプ □28mm 幅42.5mm×高さ36mm ●AREA信号:モーターが設定されたエリア内にいるとき、出力される信号です。
TLC出力:押し当て運転中、出力トルクが設定したトルク制限値に達すると出力される信号です。
ハーモニックギヤードタイプ □30mm
●コンパクトリニアアクチュエータ
DRシリーズ
取付角ーストローク
□28mmーストローク30mm
①OK(公差内) ②NG(公差外) ③NG(ワークの入れ忘れ)
000-031330.indd 5 2021/11/19 15:31:52
移動速度 [mm/sec] 押し当て力 [N]
Page6
付録:AZシリーズ 簡易シーケンス事例
シーケンス例 ロボットの駆動範囲を限定する シーケンス例 ワークの大きさを判定する
ロボット周辺に障害物などがある場合、 アーム搬送 0˚ 押し当て運転を活用することによって、
進入禁止範囲を設定することができます。 ワークの大きさを判定する。
可動範囲
−90˚ +90˚
R0 ワーク
測定開始 測定終了!
−180˚ 進入禁止範囲
課 題 装置同士の接触を回避したい 課 題 ワークの長さが公差以内か、長いか、短いかを判断する
従来の問題点 要求動作
水平に90°の範囲で駆動するアームを検討している。 ワークの大きさを判定したい。測定開始ボタン(START信号)を入力し測定する。測定終了ボタンを押したらスタート位置に戻
この装置の周辺には、スペースの関係上、外部センサを設置する したい。また、ワーク入れ忘れのときは、自動でスタート位置に戻って欲しい。
のも難しい。
外部センサなしで、アームの動きを制限する方法はないか。
①大きいワーク ②狙い通りの ③小さいワーク ④ワーク入れ忘れ
大きさのワーク
接触する
解決策 ソフトリミットを設定 解決策 押し当て運転で止まった位置をAREA信号で判断する
解決 KEYWORD ソフトリミット くわしくは くわしくは
Webで取扱説明書を参照 解決 KEYWORD イベントジャンプ機能 ユーザー出力 Webで取扱説明書を参照
イベントジャンプ機能とは、運転I/Oイベントの「イベントトリガI/O」に設定
ソフトリミットは動作範囲を制限する機能です。 -45°
した信号のON/OFFによって、運転を分岐させる機能です。
パラメータで設定した制限値に達するとモーターは停止します。 START
AREA1:ON
公差内
90°範囲に設定 測定開始ボタン 押し当て運転
0° AREA2:ON AREA0:ON
④IN-POS:ON
公差を超えて 公差を下回って 内部信号 EACシリーズ
大きいワーク 小さいワーク
①②③TLC+AREA0~2
動作範囲を制限 外部信号
測定終了ボタン R0:OFF
ON R0:ON
AREA0
45° OFF
ON -0.1mm戻る 位置決め運転
TLC
OFF
スタート位置 位置決め運転
今回3つのエリアをもうけて、押し当て運転を に戻る
行い、ワークに押し当たった時に出るTLC信号
と組合せることで判定ができます。 END
000-031330.indd 6 2021/11/19 15:32:01
Page7
付録:AZシリーズ 簡易シーケンス事例
シーケンス例 ロボットの駆動範囲を限定する シーケンス例 ワークの大きさを判定する
ロボット周辺に障害物などがある場合、 アーム搬送 0˚ 押し当て運転を活用することによって、
進入禁止範囲を設定することができます。 ワークの大きさを判定する。
可動範囲
−90˚ +90˚
R0 ワーク
測定開始 測定終了!
−180˚ 進入禁止範囲
課 題 装置同士の接触を回避したい 課 題 ワークの長さが公差以内か、長いか、短いかを判断する
従来の問題点 要求動作
水平に90°の範囲で駆動するアームを検討している。 ワークの大きさを判定したい。測定開始ボタン(START信号)を入力し測定する。測定終了ボタンを押したらスタート位置に戻
この装置の周辺には、スペースの関係上、外部センサを設置する したい。また、ワーク入れ忘れのときは、自動でスタート位置に戻って欲しい。
のも難しい。
外部センサなしで、アームの動きを制限する方法はないか。
①大きいワーク ②狙い通りの ③小さいワーク ④ワーク入れ忘れ
大きさのワーク
接触する
解決策 ソフトリミットを設定 解決策 押し当て運転で止まった位置をAREA信号で判断する
解決 KEYWORD ソフトリミット くわしくは くわしくは
Webで取扱説明書を参照 解決 KEYWORD イベントジャンプ機能 ユーザー出力 Webで取扱説明書を参照
イベントジャンプ機能とは、運転I/Oイベントの「イベントトリガI/O」に設定
ソフトリミットは動作範囲を制限する機能です。 -45°
した信号のON/OFFによって、運転を分岐させる機能です。
パラメータで設定した制限値に達するとモーターは停止します。 START
AREA1:ON
公差内
90°範囲に設定 測定開始ボタン 押し当て運転
0° AREA2:ON AREA0:ON
④IN-POS:ON
公差を超えて 公差を下回って 内部信号 EACシリーズ
大きいワーク 小さいワーク
①②③TLC+AREA0~2
動作範囲を制限 外部信号
測定終了ボタン R0:OFF
ON R0:ON
AREA0
45° OFF
ON -0.1mm戻る 位置決め運転
TLC
OFF
スタート位置 位置決め運転
今回3つのエリアをもうけて、押し当て運転を に戻る
行い、ワークに押し当たった時に出るTLC信号
と組合せることで判定ができます。 END
000-031330.indd 7 2021/11/19 15:32:01
Page8
設計にパッと活かせる 小型化や自作など
WEBコンテンツ紹介! 新たなロボット需要に
真似するだけで、プログラムできる 簡易シーケンスや各機能の活用事例 検索
ハイブリッド制御システム
「運転中に外部信号で、運転を切り替え
たい」「エリア信号をカスタマイズした AZシリーズ
い」といった場面を想定した事例を
WEBで公開しています。
生産現場のニーズに対応する、アブソリュートセンサ搭載小型制御モーター
近年の人材不足などを背景に「人の作業を代替するロボット」のニーズが高まり、必要な作業、動作にあったロボットを求めて
新規設計や、より小型のロボットが検討されるシーンが増えています。
AZシリーズは、アブソリュートシステムをバッテリレスで構築できる機械式センサを搭載した小型の制御モーター。
いま広がるロボットの小型化・製作ニーズに応えます。
組み合わせるだけで、設計できる サンプルCADデータ 検索
ロボットの
位置決めピンやねじのサイズ、位置情報 ロボットを 調整が面倒で使いづらい
があらかじめ考慮されているため、機械 こんなお悩みは もっと小型化
設計の手間削減に貢献します。
ありませんか? したい
単機能でシンプルな
ロボットを製作したいが
手間がかかる
シンプルな小型ロボット製作にはAZシリーズが最適です!
POINT POINT POINT POINT
見るだけで、設定できる 使い方ナビ 検索 1 2 3 4
配線などの運転準備から、位置決め運 状態を監視し、 ハイブリッド制御 さまざまな
エンドエフェクタ
転の基本設定、様々な運転パターンの 変化に柔軟に による応答性と インターフェイス
設定方法を動画でご紹介しています。 にも最適
対応 信頼性の向上 に対応
ニーズに合ったさまざまなロボットの製作が可能
お客様ご相談センター
製品に関する技術的なお問い合わせ、お見積、ご注文はこちらまで。携帯電話からもご利用可能です。 https://www.orientalmotor.co.jp/
受付時間 平日 / 9:00~ 19:00
(土日祝日・その他当社規定による休日を除く) TEL 0120-925-410 FAX 0120-925-601
21X 10000ZY G-154-3
2021年10月制作
000-031330.indd 8 2021/11/19 15:31:21