



関連メディア
このカタログについて
| ドキュメント名 | Pick and Place Robot PPR |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 2.4Mb |
| 取り扱い企業 | THK株式会社 (この企業の取り扱いカタログ一覧) |



このカタログの内容
Page1
NEW 世界初 工程最適型ロボット
SMART SERIES
■本カタログに記載の図・写真と実際の製品とでは異なる場合があります。
■改良のため予告なしに、外観・仕様等を変更することがありますので、ご採用の時は事前にお問い合わせください。
■カタログの制作には慎重を期しておりますが、誤字・脱字等により生じた損害については、責任を負いかねますのでご了承
ください。
■弊社製品・技術の輸出及び輸出のための販売につきましては、外国為替及び外国貿易法、及びその他の法令の遵守を
基本方針としております。 尚、弊社製品の単品での輸出については、予めご相談ください。
安全に関する注意
製品を安全にお使いいただくために、ご使用前に必ず「取扱説明書」をよくお読みになり、
内容を十分にご理解の上、安全のための注意事項、設置・使用環境について厳守してください。
CATALOG No.J-02-1 ©THK CO.,LTD. 202005 Printed in Japan
Page2
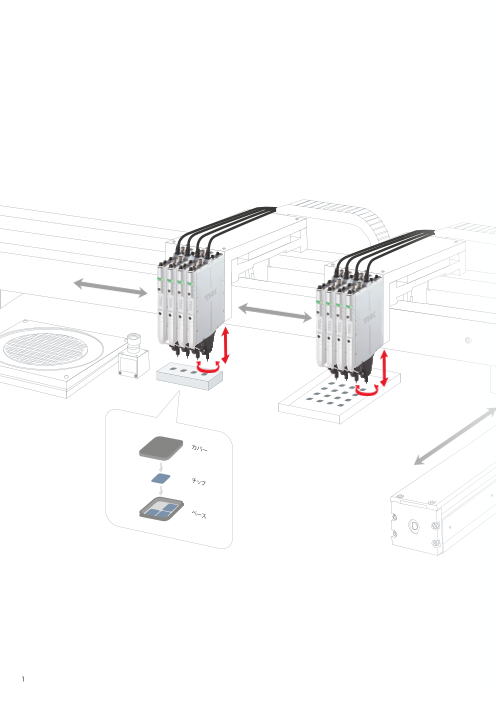
カバー
チップ
ベース
1
Page3
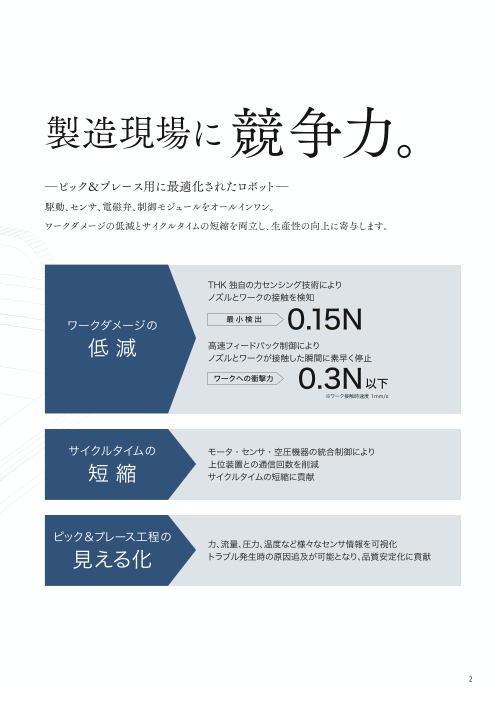
THK 独自の力センシング技術により
ノズルとワークの接触を検知
ワークダメージの 最 小 検 出 0.15N
低 減 高速フィードバック制御により ノズルとワークが接触した瞬間に素早く停止
ワークへの衝撃力 0.3N以下
※ワーク接触時速度 1mm/s
カバー サイクルタイムの モータ・センサ・空圧機器の統合制御により
短 縮 上位装置との通信回数を削減 チッ サイクルタイムの短縮に貢献プ
ベース
ピック&プレース工程の 力、流量、圧力、温度など様々なセンサ情報を可視化
見える化 トラブル発生時の原因追及が可能となり、品質安定化に貢献
2
Page4
ワークダメージの低減
力センサによる瞬時接触停止
THK独自の力センシング技術により、今まで困難であった
ワーク接触時の微小な力を検出可能です。
フィードバック制御により高速動作とワークへのダメージ
低減を両立できます。
※力センサ分解能 0.01N
力センサ[N] ※イメージ
1.0
0.9
0.8 ノズルとワークの接触を
0.7 0.15N以下で検知し、瞬時に停止
0.6
0.5 衝撃力0.3N以下
0.4
0.35 (検出荷重一摺動抵抗)
0.3
0.2
0.1 低速動作中
0 摺動抵抗
ピック&プレース工程 全20種類のデータを
の見える化 Z 軸 最大10個まで同時表示可能
設定・モニタ用ソフト「T-ACT」 θ軸
力センサ
[ モニタ機能による波形取得 ]
力、圧力、流量、位置センサなど、全てのセンサ情報を 圧力
波形でモニタリングすることが可能です。
ピック&プレースのサイクル毎に表示します。
※ CSV 出力も可能 流量
3
Page5
サイクルタイムの短縮
統合制御システムによる時間ロスの削減
PPR では各モータ、センサを統合させたシーケンス制御が
可能です。従来の PLC を中心とした制御に比べ、通信回数
が減り、時間ロスを最小にします。
[ 既存システム ] [ PPR システム ]
連携動作・タイミングは全てPLCで管理 連携動作・タイミングは統合制御で完結
センサ情報
PLC PLC
動作完了
動作開始 PLCからのシーケンス開始 PLCへシーケンス完了を通知
圧力センサ
統合制御
Z 軸 【駆動】 【センサ】
ドライバ 流量センサ Z 軸駆動 圧力センサ
θ軸
ドライバ θ軸制御 流量センサ力センサ
吸着弁 空圧制御 力センサ
開放弁
Z 軸 アラーム発生
θ軸
力センサ
[ エラーロギング機能 ]
アラームが発生した場合や任意のタイミングで 圧力
センサ情報をロギングすることが可能です。
サンプリング周期0.1msで10秒間のデータを取得 流量
できます。
※発生前 8 秒と後 2 秒のデータ 吸着弁 前8秒 後2秒
4
Page6
システム構成
電気系システム構成
★の周辺機器については、必要に応じてお客様にてご準備ください。
[ 通信方式 ]
Ethernet(TCP/IP)
★PC ★PLC
★USBケーブル
★LAN ケーブル
★非常停止スイッチ
★主回路、制御回路電源 ★LAN ケーブル
DC24V±10%
★電磁接触器
★ノイズフィルタ
次のコントローラもしくは
その他のスレーブ機器
★電源
空圧系システム構成
★の周辺機器については、必要に応じてお客様にてご準備ください。 吸着エア(正圧) ★吸着用正圧
(コンプレッサ/大気解放)
空冷(OUT)
★空冷用排気
空冷(IN) 吸着エア(負圧) ★吸着用負圧
★空冷用正圧 (エジェクタ/真空ポンプ)
※十分な排気特性を有しているもの
※積層設置時や高負荷稼動時には、内 クリーン対応
部の温度が上がります。温度センサ
の値を確認し、必要に応じて空冷環
境をご用意ください。 ★フィルタ ★クリーン対応用負圧
【注記】
• 空冷用、吸着用、クリーン対応用の空圧機器は必ず別
系統でご準備ください。
• 空圧機器の取り扱いについては、各社の取扱説明書をご
参照ください。
• 空冷用エアは必ずドライエアを使用してください。
• 吸着エア(正圧)にかけるエアの圧力を、以下の数値に
制限してください。 制限値:0.2MPa(G)
★ノズル ※吸着ワークに適したノズルをお客様にてご準備ください。
5
Page7
仕様
ヘッド外形寸法 製品形番
製品 形番
ヘッド PPR-LR3
(350)
コントローラ PPR-CTR3
専用ヘッドケーブル(1 m) PPR-FXC1
専用ヘッドケーブル(3 m) PPR-FXC3
4H7
長穴深サ4 専用ヘッドケーブル(5 m) PPR-FXC5
基本仕様
項目 仕様
ストローク 30[mm]
分解能 1[μm]
繰返し位置決め精度 ±1[μm]
最高速度 500[mm/s]
Z軸 定格推力※1 3.3[N]
最大推力※1 5.6[N]
2-M4深サ4 押付力分解能 0.01[N]
ヘリサート 可搬質量 80[g]
可動部質量 115[g]
7.5
ストローク ±180[deg(] 多回転可)
ヘ 分解能 0.01[deg]
ッ
4H7深サ4 ド 位置決め精度 0.06[deg/180deg]以下
軸振れ精度※2 50[μm]以下
θ軸 最大回転数 1400[rpm]
定格トルク※1 1.6[mN•m]
最大トルク※1 5.2[mN•m]
最大許容イナーシャ 2[kg・mm2]
15+0.16 A部
可動部イナーシャ 0.1[kg・mm2]
- 0.04
使用温度/保存温度 0~40℃/-10~60℃ (凍結しないこと)
6h7
使用湿度/保存湿度 20~80%RH/90%RH以下 ( 4 .8) 5.5 (結露しないこと)
53 (15) 質量 約620[g]
106 入力電源 24[V]±10%0.02 A
電源容量 4[A]
2-M3深サ3 コ 対応ネットワーク EtherCAT, MECHATROLINK-Ⅲ, M3深サ3 ン Ethernet(TCP/IP)
A部詳細(S=2 :1) トロ 使用温度/保存温度 0~50℃/-10~60℃ ー (凍結しないこと)
ラ
14 78 使用湿度/保存湿度 90%RH以下/90%RH以下 (結露しないこと)
質量 約190[g]
規格 CE
コントローラ外形寸法 ※1: 電機子巻線平均温度が 100℃の時の値です。該当箇所以外の項目については、20℃
26 (7.5) 92 2-M4 の時の値です。
(A面より深サ5.5) ※2:シャフトが最伸長状態(st:30mm)での値です。
[Z 軸駆動]搬送物質量に対する加速度・最高速度
加速度[mm/s2] 最高速度[mm/s]
35000 600
加速度[mm/s2]
30000 最高速度[mm/s] 500
25000
400
20000
300
15000
200
10000
5000 100
0 0
0 20 40 60 80
搬送物質量[g]
(平常時6.0)
(開放時8.0) ※上記グラフは、ストローク 10mm、DUTY70%で想定しています。
6
90°
6
7.5 3.5
45.5 90
15 142.5 5
(255)
7.5 st:30 55.5 175 (12.7)
44
139
(7.5)
100
Page8
NEW 世界初 工程最適型ロボット
SMART SERIES
■本カタログに記載の図・写真と実際の製品とでは異なる場合があります。
■改良のため予告なしに、外観・仕様等を変更することがありますので、ご採用の時は事前にお問い合わせください。
■カタログの制作には慎重を期しておりますが、誤字・脱字等により生じた損害については、責任を負いかねますのでご了承
ください。
■弊社製品・技術の輸出及び輸出のための販売につきましては、外国為替及び外国貿易法、及びその他の法令の遵守を
基本方針としております。 尚、弊社製品の単品での輸出については、予めご相談ください。
安全に関する注意
製品を安全にお使いいただくために、ご使用前に必ず「取扱説明書」をよくお読みになり、
内容を十分にご理解の上、安全のための注意事項、設置・使用環境について厳守してください。
CATALOG No.J-02-1 ©THK CO.,LTD. 202005 Printed in Japan